



1. Introduction
The growth of perturbations at an interface between two different fluids subjected to an impulsive acceleration is usually referred to as the Richtmyer–Meshkov (RM) instability, which was first analysed theoretically by Richtmyer (Reference Richtmyer1960) and later confirmed experimentally by Meshkov (Reference Meshkov1969). Another similar hydrodynamic instability is the Rayleigh–Taylor (RT) instability (Rayleigh Reference Rayleigh1883; Taylor Reference Taylor1950), for which the interface suffers a finite, sustained acceleration. Although the RM and RT instabilities share the common evolution processes, such as the formation of bubbles and spikes as well as the flow transition to turbulent mixing, their underlying regimes are distinct. In recent decades, the RM instability has received increasing attention due to its significance in scientific research (e.g. compressible turbulence) (Noble et al. Reference Noble, Ames, McConnell, Oakley, Rothamer and Bonazza2023) and practical applications (e.g. supernova explosion) (Musci et al. Reference Musci, Petter, Pathikonda, Ochs and Ranjan2020), and comprehensive reviews have been reported (Ranjan, Oakley & Bonazza Reference Ranjan, Oakley and Bonazza2011; Zhou Reference Zhou2017).
Compressibility and nonlinearity are two major obstacles to developing an accurate model for the RM instability (Wouchuk Reference Wouchuk2001). At the early stage when the transmitted and reflected waves are close to the interface, compressibility is dominant and nonlinearity is less important. As the waves are far away from the interface, compressibility is weak and nonlinearity becomes dominant. Hence, the RM instability experiences the transition from a linear compressible regime at the early stage to a nonlinear incompressible regime at the late stage. A combined model for the instability growth at the whole stage can be achieved by matching the compressible linear model (valid at the early stage) and the incompressible nonlinear model (valid at the late stage). This physical picture has been demonstrated true for the weak shock case (Zhang & Sohn Reference Zhang and Sohn1997). However, for a moderate or strong shock, the transmitted shock (TS) is close to the interface for a long time and the transverse waves behind the shock continuously affect the interface evolution (called shock proximity effect), giving rise to an evident compressibility effect at late stages. This has been confirmed by several independent shock-tube experiments (Sadot et al. Reference Sadot, Rikanati, Oron, Ben-Dor and Shvarts2003; Puranik et al. Reference Puranik, Oakley, Anderson and Bonazza2004; Motl et al. Reference Motl, Oakley, Ranjan, Weber, Anderson and Bonazza2009), in which the bubbles were observed to be flattened by the transverse waves at the late stage. The coexistence of compressibility and nonlinearity at late stages poses a great challenge for theoretical treatment.
Previous studies on compressibility effect mainly considered the RM instability induced by a planar shock with moderate to strong strengths. This is not the case in realities such as inertial confinement fusion (ICF) and supernova explosion, where the RM instability is usually induced by a curved shock. A typical example is the divergent shock. For example, the divergent RM instability is an important physical process that should be considered when explaining the remnant of supernova explosion. Also, in ICF, after the convergent shock focuses at the geometric centre, a reflected divergent shock is generated immediately, which later triggers the divergent RM instability, greatly enhancing the material mixing. The underlying regimes of the divergent RM instability are distinctly different from the planar and convergent counterparts. Specifically, geometric expansion inhibits the instability growth for incompressible flows. In addition, a divergent shock becomes weaker and weaker with time, and thus a non-uniform, unsteady flow field is established behind it (Zhang et al. Reference Zhang, Ding, Si and Luo2023). Moreover, either nonlinearity or compressibility behaves differently in the divergent RM instability as it does in the planar and convergent cases. For these reasons, the divergent RM instability could present unique high-Mach-number effects, which motivates the present study. In this work, the influence of shock intensity on the divergent RM instability is investigated, focusing on the roles of compressibility and nonlinearity in the divergent RM instability, particularly for cases with higher Mach numbers.
Shock-tube experiments on the evolution of a well-characterized single-mode interface impacted by a cylindrical divergent shock with various Mach numbers are performed. An unperturbed interface is first examined to obtain the background flow. The effect of non-uniform pressure field behind the divergent shock on the interface motion is discussed and modelled. A thorough analysis on the effects of compressibility, nonlinearity and RT stabilization under various Mach numbers is presented. The result illustrates the existence of unique flow regimes for the divergent RM instability.
2. Experimental methods
The experiments are performed in a novel divergent shock tube designed based on shock dynamics theory. A sketch of the shock tube is given in figure 1(a). An initial planar shock is generated immediately after the rupture of the diaphragm separating the driver and driven sections. When this planar shock propagates along the concave wall  $AB$, it is transformed gradually to a cylindrical convergent shock. As time proceeds, the cylindrical shock converges along the oblique wall
$AB$, it is transformed gradually to a cylindrical convergent shock. As time proceeds, the cylindrical shock converges along the oblique wall  $BC$ with its strength increasing gradually. Later, it is converted back into a planar shock by the convex wall
$BC$ with its strength increasing gradually. Later, it is converted back into a planar shock by the convex wall  $CD$. Note this planar shock is stronger than the initial one (Zhan et al. Reference Zhan, Li, Yang, Zhu and Yang2018). Subsequently, the strong planar shock is converted to a cylindrical divergent shock by the convex wall
$CD$. Note this planar shock is stronger than the initial one (Zhan et al. Reference Zhan, Li, Yang, Zhu and Yang2018). Subsequently, the strong planar shock is converted to a cylindrical divergent shock by the convex wall  $EF$. Afterwards, the divergent shock collides with the downstream air/SF
$EF$. Afterwards, the divergent shock collides with the downstream air/SF $_6$ interface, triggering the divergent RM instability. For more details about the design principle of the shock tube, readers are referred to previous works (Zhai et al. Reference Zhai, Liu, Qin, Yang and Luo2010; Li et al. Reference Li, Ding, Zhai, Si, Liu, Huang and Luo2020).
$_6$ interface, triggering the divergent RM instability. For more details about the design principle of the shock tube, readers are referred to previous works (Zhai et al. Reference Zhai, Liu, Qin, Yang and Luo2010; Li et al. Reference Li, Ding, Zhai, Si, Liu, Huang and Luo2020).

Figure 1. Schematic diagrams of (a) the shock tube and (b) the interface-formation device.
The gas interface is created with a well-verified soap-film technique that can largely eliminate initial imperfections at the interface including short-wavelength perturbations, diffusion layer and three-dimensionality (Liu et al. Reference Liu, Liang, Ding, Liu and Luo2018). As depicted in figure 1(b), the interface is formed in a device composed of sections I and II. These two sections are made of transparent acrylic plates (3 mm thick) sculpted by a high-precision engraving machine. For section II, two grooves (0.75 mm deep and 0.5 mm wide) with the same shape as the desired interface are engraved on the internal surfaces of the upper and lower plates. Then, two thin filaments (1.0 mm high and 0.5 mm wide) with the same shape as the grooves are, respectively, inserted into the two grooves to produce desired constraints. The height of the filaments protruding into the flow is less than 0.3 mm, which is much smaller than the inner height (7.0 mm) of the test section, and thus produces a negligible influence on the flow. As a square frame dipped with moderate soap solution (60 % distilled water, 20 % sodium oleate and 20 % glycerine) is pulled along the filaments, a soap-film interface that presents the same shape as the filaments is generated. Subsequently, SF $_6$ gas is pumped into section II through the inflow hole to exhaust air through the outflow hole. An oxygen concentration detector is placed at the outflow hole to ensure a high concentration of SF
$_6$ gas is pumped into section II through the inflow hole to exhaust air through the outflow hole. An oxygen concentration detector is placed at the outflow hole to ensure a high concentration of SF $_6$ inside the layer. The initial conditions such as shock strength, interface shape and gas concentration can be well controlled in the experiment, which ensures high repeatability of the experimental results. In the cylindrical coordinate system, a single-mode interface can be parameterized as
$_6$ inside the layer. The initial conditions such as shock strength, interface shape and gas concentration can be well controlled in the experiment, which ensures high repeatability of the experimental results. In the cylindrical coordinate system, a single-mode interface can be parameterized as  $r(\theta ) = R_0 + a_0$cos
$r(\theta ) = R_0 + a_0$cos $(n\theta - {\rm \pi})$, where
$(n\theta - {\rm \pi})$, where  $R_0$ (
$R_0$ ( $=160$ mm) refers to the radius of the initial unperturbed interface,
$=160$ mm) refers to the radius of the initial unperturbed interface,  $a_0$ to the initial amplitude,
$a_0$ to the initial amplitude,  $n$ to the azimuthal mode number and
$n$ to the azimuthal mode number and  $\theta$ to the azimuthal angle. This interface is sketched on the right side of figure 1(a), and the angle
$\theta$ to the azimuthal angle. This interface is sketched on the right side of figure 1(a), and the angle  $\theta$ is measured from the origin
$\theta$ is measured from the origin  $O$ drawn in the segment labelled DE. The flow field is recorded by a high-speed schlieren system. The frame rate of the high-speed camera is set to be 60 000 f.p.s. with a shutter time
$O$ drawn in the segment labelled DE. The flow field is recorded by a high-speed schlieren system. The frame rate of the high-speed camera is set to be 60 000 f.p.s. with a shutter time  $1\,\mathrm {\mu }$s. The spatial resolution of schlieren images is 0.34 mm pixel
$1\,\mathrm {\mu }$s. The spatial resolution of schlieren images is 0.34 mm pixel $^{-1}$. The ambient pressure and temperature are 101.3 kPa and
$^{-1}$. The ambient pressure and temperature are 101.3 kPa and  $296 \pm 2$ K, respectively.
$296 \pm 2$ K, respectively.
Table 1. Detailed parameters corresponding to initial conditions for each case. Here  $a_0$ and
$a_0$ and  $n$ are the initial amplitude and azimuthal mode number of the interface, respectively;
$n$ are the initial amplitude and azimuthal mode number of the interface, respectively;  $V_{ics}$ is the incident shock velocity;
$V_{ics}$ is the incident shock velocity;  $V_{ts}$ is the transmitted shock velocity;
$V_{ts}$ is the transmitted shock velocity;  $\Delta V$ is the initial velocity of the shocked interface; mfra(SF
$\Delta V$ is the initial velocity of the shocked interface; mfra(SF $_6$) is the mass fraction of SF
$_6$) is the mass fraction of SF $_6$ on the right side of the interface;
$_6$ on the right side of the interface;  $A$ is the preshock Atwood number.
$A$ is the preshock Atwood number.

3. Results and discussion
A quasi-1-D experiment corresponding to a uniform cylindrical interface interacting with a cylindrical divergent shock is first performed to examine the background flow, for which there is no theoretical solution. Various shock Mach numbers are considered. Detailed parameters corresponding to the initial conditions for cases U1-U4 are listed in table 1, where the Atwood number ( $A$) is defined as
$A$) is defined as  $A = (\rho _2 - \rho _1)/(\rho _2 + \rho _1)$ with
$A = (\rho _2 - \rho _1)/(\rho _2 + \rho _1)$ with  $\rho _1$ and
$\rho _1$ and  $\rho _2$ being the gas densities on the left and right sides of the interface, respectively. Sequences of schlieren images illustrating the movements of the interface and the shock for cases U1 and U4 are displayed in figure 2. Case U1 is taken as an example to detail the motion process. Time origin in this work is defined as the moment at which the incident shock arrives at the mean position of the interface. At the beginning (
$\rho _2$ being the gas densities on the left and right sides of the interface, respectively. Sequences of schlieren images illustrating the movements of the interface and the shock for cases U1 and U4 are displayed in figure 2. Case U1 is taken as an example to detail the motion process. Time origin in this work is defined as the moment at which the incident shock arrives at the mean position of the interface. At the beginning ( $-26\,\mathrm {\mu }$s), an incident cylindrical shock (ICS) together with a cylindrical unperturbed interface (UI) is clearly observed. Later, the ICS collides with the air/SF
$-26\,\mathrm {\mu }$s), an incident cylindrical shock (ICS) together with a cylindrical unperturbed interface (UI) is clearly observed. Later, the ICS collides with the air/SF $_6$ interface, bifurcating into an inward-moving reflected shock (RS) and an outward-moving TS (
$_6$ interface, bifurcating into an inward-moving reflected shock (RS) and an outward-moving TS ( $40\,\mathrm {\mu }$s). After that, the shocked interface (SI) moves downstream following the TS. Due to the shock impact, the soap film is atomized into small droplets with a diameter of approximately
$40\,\mathrm {\mu }$s). After that, the shocked interface (SI) moves downstream following the TS. Due to the shock impact, the soap film is atomized into small droplets with a diameter of approximately  $30\,\mathrm {\mu }$m. Previous studies (Ding et al. Reference Ding, Si, Yang, Lu, Zhai and Luo2017; Liu et al. Reference Liu, Liang, Ding, Liu and Luo2018; Zhang et al. Reference Zhang, Ding, Si and Luo2023) have demonstrated a negligible influence of the soap droplets on the interface evolution. The SI maintains a cylindrical shape during the experimental time, which indicates a negligible influence of boundary layer on the interface motion. The mass fraction of SF
$30\,\mathrm {\mu }$m. Previous studies (Ding et al. Reference Ding, Si, Yang, Lu, Zhai and Luo2017; Liu et al. Reference Liu, Liang, Ding, Liu and Luo2018; Zhang et al. Reference Zhang, Ding, Si and Luo2023) have demonstrated a negligible influence of the soap droplets on the interface evolution. The SI maintains a cylindrical shape during the experimental time, which indicates a negligible influence of boundary layer on the interface motion. The mass fraction of SF $_6$ inside the layer is determined based on 1-D gas dynamics theory, and the detailed estimation process has been reported by Zhang et al. (Reference Zhang, Ding, Si and Luo2023). It is found that as the shock is intensified, the relative velocity between the TS and the interface decreases, indicating a closer proximity between them.
$_6$ inside the layer is determined based on 1-D gas dynamics theory, and the detailed estimation process has been reported by Zhang et al. (Reference Zhang, Ding, Si and Luo2023). It is found that as the shock is intensified, the relative velocity between the TS and the interface decreases, indicating a closer proximity between them.

Figure 2. Schlieren images showing the motions of waves and the interface for cases U1 and U4: Ma, the Mach number of the incident shock; ICS, the incident cylindrical shock; UI, the initial unperturbed interface; SI, the shocked interface; TS, the transmitted shock; RS, the reflected shock. The unit of numbers is  $\mathrm {\mu }$s.
$\mathrm {\mu }$s.
Dimensionless variations of the interface displacement with time are plotted in figure 3(a), where two cases with lower Mach numbers reported by Li et al. (Reference Li, Ding, Zhai, Si, Liu, Huang and Luo2020) are also given. Here, time is scaled as  $\Delta Vnt/R_0$ with
$\Delta Vnt/R_0$ with  $\Delta V$ being the initial velocity of the SI and the interface displacement as
$\Delta V$ being the initial velocity of the SI and the interface displacement as  $n(R-R_0)/R_0$ with R being the radius of the interface. For all cases, the interface moves uniformly during the early period following the shock passage, and later presents an evident deceleration. The stronger the incident shock, the larger the interface deceleration. The normalized trajectories of the interface collapse at the early stage for all cases, but deviate at the late stage due to different deceleration. It is desirable to derive an analytical solution for the interface trajectory, which is an important step towards the understanding and modelling of the divergent RM instability. Unfortunately, the unsteady, non-uniform flow behind the divergent shock greatly impedes the theoretical derivation.
$n(R-R_0)/R_0$ with R being the radius of the interface. For all cases, the interface moves uniformly during the early period following the shock passage, and later presents an evident deceleration. The stronger the incident shock, the larger the interface deceleration. The normalized trajectories of the interface collapse at the early stage for all cases, but deviate at the late stage due to different deceleration. It is desirable to derive an analytical solution for the interface trajectory, which is an important step towards the understanding and modelling of the divergent RM instability. Unfortunately, the unsteady, non-uniform flow behind the divergent shock greatly impedes the theoretical derivation.

Figure 3. (a) Trajectories of the interface for all cases. (b) The time duration ( $\Delta t$) between the moments at which the shock and the interface pass through position
$\Delta t$) between the moments at which the shock and the interface pass through position  $R$.
$R$.
In our recent work, an analytical solution for the trajectory of a fluid element in divergent geometry was derived under the incompressible flow assumption, which is expressed as
 \begin{equation} r=[r_0^2+2C(t-t_0)]^{1/2}. \end{equation}
\begin{equation} r=[r_0^2+2C(t-t_0)]^{1/2}. \end{equation}
Here  $t_0$ is the initial time,
$t_0$ is the initial time,  $r_0=r(t_0)$ and
$r_0=r(t_0)$ and  $C=u_{0}r_0$ with
$C=u_{0}r_0$ with  $u_{0}=u(t_0)$, where u is the flow velocity in the radial direction. Note the non-uniform postshock pressure field has not been taken into account in (3.1). Here, provided the initial shock strength
$u_{0}=u(t_0)$, where u is the flow velocity in the radial direction. Note the non-uniform postshock pressure field has not been taken into account in (3.1). Here, provided the initial shock strength  $M = M_0$ at
$M = M_0$ at  $r = r_0$, the variation of the divergent shock Mach number with radius
$r = r_0$, the variation of the divergent shock Mach number with radius  $r$ can be calculated according to the Chester–Chisnell–Whitham relation (Whitham Reference Whitham1958). To quantify the effect of a non-uniform pressure field on the interface motion, an assumption that the postshock pressure gradient remains invariant at each radius is adopted. Incorporating the pressure gradient (calculated by Rankine–Hugoniot conditions) into the 1-D momentum equation in a cylindrical coordinate system, the interface trajectory predicted by (3.1) can be modified. It is found that this modified model gives a reasonable prediction of the interface trajectory for all cases. Particularly, higher-Mach-number cases (
$r$ can be calculated according to the Chester–Chisnell–Whitham relation (Whitham Reference Whitham1958). To quantify the effect of a non-uniform pressure field on the interface motion, an assumption that the postshock pressure gradient remains invariant at each radius is adopted. Incorporating the pressure gradient (calculated by Rankine–Hugoniot conditions) into the 1-D momentum equation in a cylindrical coordinate system, the interface trajectory predicted by (3.1) can be modified. It is found that this modified model gives a reasonable prediction of the interface trajectory for all cases. Particularly, higher-Mach-number cases ( $Ma=1.6$ and 1.7) present better agreement with the prediction. An interpretation is given below. Figure 3(b) gives the time duration (
$Ma=1.6$ and 1.7) present better agreement with the prediction. An interpretation is given below. Figure 3(b) gives the time duration ( $\Delta t$) between the instances at which the divergent shock and the SI pass through the position
$\Delta t$) between the instances at which the divergent shock and the SI pass through the position  $R$. A notable reduction in
$R$. A notable reduction in  $\Delta t$ is observed when increasing the Mach number. It means that for a stronger shock, the postshock flow at radius
$\Delta t$ is observed when increasing the Mach number. It means that for a stronger shock, the postshock flow at radius  $R$ undergoes a shorter period of variation before the arrival of the interface. This makes the assumption of invariance of postshock pressure gradient more reasonable.
$R$ undergoes a shorter period of variation before the arrival of the interface. This makes the assumption of invariance of postshock pressure gradient more reasonable.
The divergent RM instability at a single-mode interface under four shock strengths (cases S1–S4) is then examined. Detailed parameters corresponding to the initial conditions for each case are listed in table 1. The initial amplitude of the interface is  $a_0 = 1.5$ mm and the azimuthal mode number is
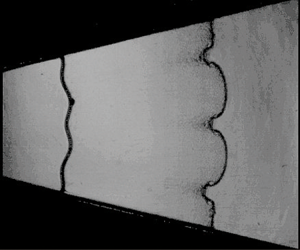
$a_0 = 1.5$ mm and the azimuthal mode number is  $n = 36$, corresponding to an amplitude-to-wavelength ratio of 0.054. The other initial conditions remain the same as the unperturbed case. Developments of the wave patterns and the interface for these cases are illustrated in figure 4. Case S1 (
$n = 36$, corresponding to an amplitude-to-wavelength ratio of 0.054. The other initial conditions remain the same as the unperturbed case. Developments of the wave patterns and the interface for these cases are illustrated in figure 4. Case S1 ( $Ma=1.3$) is taken as an example to detail the evolution process. At the beginning (
$Ma=1.3$) is taken as an example to detail the evolution process. At the beginning ( $-9\,\mathrm {\mu }$s), an ICS together with a sinusoidal perturbed interface (PI) are clearly observed. Then, the ICS collides with the PI, bifurcating immediately into sine-like transmitted and RSs (
$-9\,\mathrm {\mu }$s), an ICS together with a sinusoidal perturbed interface (PI) are clearly observed. Then, the ICS collides with the PI, bifurcating immediately into sine-like transmitted and RSs ( $41\,\mathrm {\mu }$s). During this process, the interface suffers a quick drop in amplitude due to shock compression. Subsequently, the SI moves downstream with its amplitude increasing persistently. As time proceeds, the TS propagates forwards with a gradually decaying amplitude and finally recovers to a uniform cylindrical shock (
$41\,\mathrm {\mu }$s). During this process, the interface suffers a quick drop in amplitude due to shock compression. Subsequently, the SI moves downstream with its amplitude increasing persistently. As time proceeds, the TS propagates forwards with a gradually decaying amplitude and finally recovers to a uniform cylindrical shock ( $491\,\mathrm {\mu }$s). It is worth noting that no evident spike and bubble structures are observed even at the late stage when intensifying the incident shock, which differs from the planar RM instability (Sadot et al. Reference Sadot, Rikanati, Oron, Ben-Dor and Shvarts2003; Motl et al. Reference Motl, Oakley, Ranjan, Weber, Anderson and Bonazza2009). This phenomenon exists uniquely in divergent RM instability.
$491\,\mathrm {\mu }$s). It is worth noting that no evident spike and bubble structures are observed even at the late stage when intensifying the incident shock, which differs from the planar RM instability (Sadot et al. Reference Sadot, Rikanati, Oron, Ben-Dor and Shvarts2003; Motl et al. Reference Motl, Oakley, Ranjan, Weber, Anderson and Bonazza2009). This phenomenon exists uniquely in divergent RM instability.

Figure 4. The developments of wave patterns and interfacial morphologies for all cases. The symbols are the same as those in figure 2. The unit of the numbers is  $\mathrm {\mu }$s.
$\mathrm {\mu }$s.
Normalized variations of the interface amplitude with time for all cases are plotted in figure 5(a). The amplitude is normalized as  $\alpha = n(a - a^+_0 )/R_0$ and the time as
$\alpha = n(a - a^+_0 )/R_0$ and the time as  $\tau =n \dot {a}_0 (t-t_0^+ )/R_0$, where
$\tau =n \dot {a}_0 (t-t_0^+ )/R_0$, where  $a^+_0$ refers to the postshock amplitude,
$a^+_0$ refers to the postshock amplitude,  $t^+_0$ to the time just after the shock passage and
$t^+_0$ to the time just after the shock passage and  $\dot {a}_0$ to the initial growth rate. The solid line in figure 5(a) refers to the linear prediction of Bell (Reference Bell1951) and the dashed line to the prediction of Epstein (Reference Epstein2004) considering compressibility effect. The present experiments afford a longer observation time for the interface development as compared with that of Li et al. (Reference Li, Ding, Zhai, Si, Liu, Huang and Luo2020) such that the instability growth at a later stage can be examined. The amplitude variation curves for these cases collapse quite well at the early stage, but deviate from each other at
$\dot {a}_0$ to the initial growth rate. The solid line in figure 5(a) refers to the linear prediction of Bell (Reference Bell1951) and the dashed line to the prediction of Epstein (Reference Epstein2004) considering compressibility effect. The present experiments afford a longer observation time for the interface development as compared with that of Li et al. (Reference Li, Ding, Zhai, Si, Liu, Huang and Luo2020) such that the instability growth at a later stage can be examined. The amplitude variation curves for these cases collapse quite well at the early stage, but deviate from each other at  $\tau > 1.0$. For all cases, the growth rate decays gradually with time. The stronger the incident shock, the quicker the growth rate decay. Particularly, for the
$\tau > 1.0$. For all cases, the growth rate decays gradually with time. The stronger the incident shock, the quicker the growth rate decay. Particularly, for the  $Ma=1.6$ and
$Ma=1.6$ and  $Ma=1.7$ cases, the interface amplitude decreases at the late stage (i.e. a negative growth rate), which indicates the presence of some factors stabilizing the instability.
$Ma=1.7$ cases, the interface amplitude decreases at the late stage (i.e. a negative growth rate), which indicates the presence of some factors stabilizing the instability.

Figure 5. (a) Temporal variations of the interface amplitude and (b) comparison between the nonlinear predictions (Wang et al. Reference Wang, Wu, Guo, Ye, Liu, Zhang and He2015) considering uniform motion (filled symbol) and deceleration (hollow symbol) for harmonic growths. The solid line in (a) refers to the linear prediction of Bell (Reference Bell1951) and the dashed line to the prediction of Epstein (Reference Epstein2004) considering compressibility effect.
The initial growth rates, obtained with a linear fit of experimental data, are 9.6, 10.2, 13.5 and 16.4 m s $^{-1}$ for cases S1, S2, S3 and S4. The growth rates predicted by the incompressible linear model (Bell Reference Bell1951) are 16.1, 21.2, 28.6 and 47.0 m s
$^{-1}$ for cases S1, S2, S3 and S4. The growth rates predicted by the incompressible linear model (Bell Reference Bell1951) are 16.1, 21.2, 28.6 and 47.0 m s $^{-1}$ for cases S1–S4, respectively. The lower growth rate in experiment than prediction is primarily attributed to compressibility effect (i.e. pressure disturbances behind the reflected and TSs play a role). This is similar to the finding in convergent RM instability (Ding et al. Reference Ding, Si, Yang, Lu, Zhai and Luo2017). Differing from the weak shock case, in which compressibility effect is weak at late stages, for a moderate shock (
$^{-1}$ for cases S1–S4, respectively. The lower growth rate in experiment than prediction is primarily attributed to compressibility effect (i.e. pressure disturbances behind the reflected and TSs play a role). This is similar to the finding in convergent RM instability (Ding et al. Reference Ding, Si, Yang, Lu, Zhai and Luo2017). Differing from the weak shock case, in which compressibility effect is weak at late stages, for a moderate shock ( $Ma=1.6$ and
$Ma=1.6$ and  $1.7$), the TS is closer to the interface (observed in the unperturbed case) and compressibility may be pronounced at late stages. Thus, the effect of compressibility on the instability growth is first assessed. Assuming the fluids on both sides of the interface are inviscid and irrotational and also undergo uniform compression (i.e.
$1.7$), the TS is closer to the interface (observed in the unperturbed case) and compressibility may be pronounced at late stages. Thus, the effect of compressibility on the instability growth is first assessed. Assuming the fluids on both sides of the interface are inviscid and irrotational and also undergo uniform compression (i.e.  $\dot {\rho }_2/\rho _2 = \dot {\rho }_1/\rho _1$ with
$\dot {\rho }_2/\rho _2 = \dot {\rho }_1/\rho _1$ with  $\dot{\rho_1} (\dot{\rho_2}$) being the first derivative of
$\dot{\rho_1} (\dot{\rho_2}$) being the first derivative of  $\rho_1 (\rho_2)$ with time), Epstein (Reference Epstein2004) proposed a linear model for the instability growth at a perturbed cylindrical interface:
$\rho_1 (\rho_2)$ with time), Epstein (Reference Epstein2004) proposed a linear model for the instability growth at a perturbed cylindrical interface:
 \begin{equation} \left(-\frac{\dot{\rho}}{\rho}+\frac{{\rm d}}{{\rm d} t}\right) \frac{{\rm d}}{{\rm d} t}(a \rho R)=n A a \rho \frac{{\rm d}^2 R}{{\rm d} t^2}, \end{equation}
\begin{equation} \left(-\frac{\dot{\rho}}{\rho}+\frac{{\rm d}}{{\rm d} t}\right) \frac{{\rm d}}{{\rm d} t}(a \rho R)=n A a \rho \frac{{\rm d}^2 R}{{\rm d} t^2}, \end{equation}
where  $\dot {\rho }/\rho = \dot {\rho }_2/\rho _2 \approx \dot {\rho }_1/\rho _1$ with
$\dot {\rho }/\rho = \dot {\rho }_2/\rho _2 \approx \dot {\rho }_1/\rho _1$ with  $\rho$ being the average density of fluids on both sides of the interface, and
$\rho$ being the average density of fluids on both sides of the interface, and  $\alpha$ is the amplitude of the perturbed interface. Letting
$\alpha$ is the amplitude of the perturbed interface. Letting  $c = -\dot {\rho }/\rho$, the above formula is simplified to
$c = -\dot {\rho }/\rho$, the above formula is simplified to
 \begin{equation} \frac{{\rm d}^2 a}{{\rm d} t^2}+\left(\frac{2 \dot{R}}{R}-c\right) \frac{{\rm d} a}{{\rm d} t}-\left[(n A-1) \frac{\ddot{R}}{R}+ \frac{\dot{R}}{R} c+\frac{{\rm d} c}{{\rm d} t}\right] a=0. \end{equation}
\begin{equation} \frac{{\rm d}^2 a}{{\rm d} t^2}+\left(\frac{2 \dot{R}}{R}-c\right) \frac{{\rm d} a}{{\rm d} t}-\left[(n A-1) \frac{\ddot{R}}{R}+ \frac{\dot{R}}{R} c+\frac{{\rm d} c}{{\rm d} t}\right] a=0. \end{equation}
Here,  $R(t)$ is given by the function fitted from the measured radius of the corresponding UI,
$R(t)$ is given by the function fitted from the measured radius of the corresponding UI,  $\dot {R}$ and
$\dot {R}$ and  $\ddot {R}$ are the first and second derivatives of interface radius with time, respectively. For
$\ddot {R}$ are the first and second derivatives of interface radius with time, respectively. For  $c = -\dot {\rho }/\rho = 0$, the equation reduces to the Bell (Reference Bell1951) model for incompressible fluids. Here, the volume enclosed by the shock and the interface can be measured from schlieren images and thus the density variation rate
$c = -\dot {\rho }/\rho = 0$, the equation reduces to the Bell (Reference Bell1951) model for incompressible fluids. Here, the volume enclosed by the shock and the interface can be measured from schlieren images and thus the density variation rate  $c$ is available. Then, substituting the postshock parameters into (3.3), the instability growth with compressibility effect is obtained. As shown in figure 5(a), both compressible and incompressible models give a reasonable prediction of the instability growth within the measurement error. The predictions of the two models nearly collapse, which indicates a weak influence of compressibility on the instability growth for the parameter space considered in this work. Thus, the incompressible model is suitable for the present experiments. Note disturbances at a divergent shock decay more quickly than the convergent and planar shocks, which is a reason for the weak compressibility effect here.
$c$ is available. Then, substituting the postshock parameters into (3.3), the instability growth with compressibility effect is obtained. As shown in figure 5(a), both compressible and incompressible models give a reasonable prediction of the instability growth within the measurement error. The predictions of the two models nearly collapse, which indicates a weak influence of compressibility on the instability growth for the parameter space considered in this work. Thus, the incompressible model is suitable for the present experiments. Note disturbances at a divergent shock decay more quickly than the convergent and planar shocks, which is a reason for the weak compressibility effect here.
Previous studies (Li et al. Reference Li, Ding, Zhai, Si, Liu, Huang and Luo2020; Zhang et al. Reference Zhang, Ding, Si and Luo2023) showed that, in addition to the common regimes in planar RM instability, the growth of divergent RM instability at the linear stage is also affected by geometric divergence and RT effect. It is realized that these two effects could also affect the nonlinear growth of divergent RM instability, which has never been reported. To quantify the degree of nonlinearity, the growths of harmonics are obtained by performing the Fourier analysis of the interface morphologies extracted from the schlieren images. The Fourier analysis, which is applicable only to interfaces represented as single-valued functions, becomes invalid at the late stage when the spikes roll up. To obtain as much data as possible, the small curled structures at the spike head are removed via postprocessing. In this way, the growths of harmonics at a relatively later time can be obtained. As shown in the inserts of figure 6(a), a virtual interface composed of the first three harmonics obtained nearly collapses with the extracted morphology, which demonstrates the reliability of the Fourier analysis. Temporal variations of the amplitudes of the first three harmonics are plotted in figure 6. Higher-order harmonics that present a negligibly small amplitude during the experimental time are ignored. For cases S1 and S2 ( $Ma=1.3, 1.4$), the amplitude of each harmonic increases persistently with a gradually decaying growth rate at the early stage and later freezes out. For cases S3 and S4 (
$Ma=1.3, 1.4$), the amplitude of each harmonic increases persistently with a gradually decaying growth rate at the early stage and later freezes out. For cases S3 and S4 ( $Ma=1.6, 1.7$), the amplitude of each harmonic drops after saturation. The considerable amplitude of the second and third harmonics suggests that the instability has entered into a nonlinear stage. The freeze-out or decay of the second and third harmonics at the late stage indicates that nonlinearity is suppressed by a certain factor, particularly evident in stronger shock cases. The interface amplitude measured from experiment (filled circle) and that of the virtual interface composed of the harmonics (hollow circle) are also given in figure 6, and they collapse well.
$Ma=1.6, 1.7$), the amplitude of each harmonic drops after saturation. The considerable amplitude of the second and third harmonics suggests that the instability has entered into a nonlinear stage. The freeze-out or decay of the second and third harmonics at the late stage indicates that nonlinearity is suppressed by a certain factor, particularly evident in stronger shock cases. The interface amplitude measured from experiment (filled circle) and that of the virtual interface composed of the harmonics (hollow circle) are also given in figure 6, and they collapse well.

Figure 6. Comparisons between the experiment and the nonlinear prediction for the growths of the first three harmonics ( $a_1$,
$a_1$,  $a_2$ and
$a_2$ and  $a_3$) for cases S1 (a), S2 (b), S3 (c) and S4 (d). Filled symbols denote the amplitude of interface in experiment and hollow symbols denote the amplitude of a virtual interface composed of the first three harmonics.
$a_3$) for cases S1 (a), S2 (b), S3 (c) and S4 (d). Filled symbols denote the amplitude of interface in experiment and hollow symbols denote the amplitude of a virtual interface composed of the first three harmonics.
Under the incompressible, inviscid, irrotational fluid assumption, a third-order weakly nonlinear model has been derived by Wang et al. (Reference Wang, Wu, Guo, Ye, Liu, Zhang and He2015). Nevertheless, it is difficult to derive an analytical solution for the nonlinear growth of divergent RM instability at an interface with arbitrary radial motion. In this work, to predict the nonlinear growths of harmonics, the model of Wang et al. (Reference Wang, Wu, Guo, Ye, Liu, Zhang and He2015) is solved numerically by substituting the parameters in the corresponding unperturbed case (i.e. displacement  $R$, velocity
$R$, velocity  $\dot {R}$ and acceleration
$\dot {R}$ and acceleration  $\ddot {R}$) into the model. Comparisons of the growths of harmonics between the experiment and the nonlinear prediction considering interface deceleration are given in figure 6. The model predicts well the growths of the second and third harmonics for all cases. Also, it gives a good prediction of the first harmonic at the early stage, but overestimates the late-stage growth. A possible reason is that the prediction of the first harmonic takes only the third-order feedback into account, and higher-order harmonics are ignored. Both the freeze-out (cases S1 and S2) and amplitude reduction (cases S3 and S4) of the harmonics are well reproduced by the nonlinear model. To elucidate this phenomenon, comparison between the nonlinear predictions considering uniform (i.e.
$\ddot {R}$) into the model. Comparisons of the growths of harmonics between the experiment and the nonlinear prediction considering interface deceleration are given in figure 6. The model predicts well the growths of the second and third harmonics for all cases. Also, it gives a good prediction of the first harmonic at the early stage, but overestimates the late-stage growth. A possible reason is that the prediction of the first harmonic takes only the third-order feedback into account, and higher-order harmonics are ignored. Both the freeze-out (cases S1 and S2) and amplitude reduction (cases S3 and S4) of the harmonics are well reproduced by the nonlinear model. To elucidate this phenomenon, comparison between the nonlinear predictions considering uniform (i.e.  $\ddot {R}=0$) and non-uniform motions for case S1 is made. As illustrated in figure 5(b), the interface deceleration greatly inhibits the growth of each harmonic, which manifests the significant role of RT effect in divergent RM instability, leading to very weak nonlinearity during the whole experimental time. Particularly, higher-Mach-number cases present weaker nonlinearity due to stronger RT effect there. This is consistent with the observation in schlieren images, where a distinct vortex pair is noticeable at the spike tip for cases S1–S2, but diminishes for cases S3–S4. This abnormal linear growth regime has never been discovered. Various decelerations in cases S1–S4 cause different degrees of suppression of the amplitude growth, which explains the deviation in amplitude growth among these cases (figure 5a). Note without interface deceleration (i.e. RT stability), the cylindrical RM instability could present evident nonlinearity (Matsuoka & Nishihara Reference Matsuoka and Nishihara2006). Under the incompressible flow assumption, geometric divergence causes a gradual reduction in interface amplitude and a continuous increment in wavelength, resulting in a low amplitude–wavelength ratio. This is also an important factor responsible for the longer linear stage observed in divergent RM instability than the planar and convergent counterparts. Despite the linear regime, geometric divergence effect that is inherent in divergent RM instability causes a continuous decay in growth rate, and thus the amplitude growth is no longer linear in time as in the planar RM instability. The present analysis gives an in-depth understanding of the regimes of divergent RM instability. The finding indicates that the coexistence of compressibility and nonlinearity at late stages of RM instability under strong shocks, that poses a great challenge to theoretical treatment, can be avoided for the divergent situation. This is crucial for modelling the divergent RM instability under strong shocks.
$\ddot {R}=0$) and non-uniform motions for case S1 is made. As illustrated in figure 5(b), the interface deceleration greatly inhibits the growth of each harmonic, which manifests the significant role of RT effect in divergent RM instability, leading to very weak nonlinearity during the whole experimental time. Particularly, higher-Mach-number cases present weaker nonlinearity due to stronger RT effect there. This is consistent with the observation in schlieren images, where a distinct vortex pair is noticeable at the spike tip for cases S1–S2, but diminishes for cases S3–S4. This abnormal linear growth regime has never been discovered. Various decelerations in cases S1–S4 cause different degrees of suppression of the amplitude growth, which explains the deviation in amplitude growth among these cases (figure 5a). Note without interface deceleration (i.e. RT stability), the cylindrical RM instability could present evident nonlinearity (Matsuoka & Nishihara Reference Matsuoka and Nishihara2006). Under the incompressible flow assumption, geometric divergence causes a gradual reduction in interface amplitude and a continuous increment in wavelength, resulting in a low amplitude–wavelength ratio. This is also an important factor responsible for the longer linear stage observed in divergent RM instability than the planar and convergent counterparts. Despite the linear regime, geometric divergence effect that is inherent in divergent RM instability causes a continuous decay in growth rate, and thus the amplitude growth is no longer linear in time as in the planar RM instability. The present analysis gives an in-depth understanding of the regimes of divergent RM instability. The finding indicates that the coexistence of compressibility and nonlinearity at late stages of RM instability under strong shocks, that poses a great challenge to theoretical treatment, can be avoided for the divergent situation. This is crucial for modelling the divergent RM instability under strong shocks.
4. Conclusions
This work reports the shock-tube experiments on the divergent RM instability at a single-mode air/SF $_6$ interface under four Mach numbers. The cylindrical divergent shock is generated in a novel shock tube designed based on shock dynamics theory. The single-mode interface is created with an advanced soap-film technique. The unperturbed case is first examined to obtain the background flow. It is found that the interface moves uniformly at the early stage, and subsequently decelerates. The stronger the incident shock, the larger the interface deceleration. An approximate 1-D model considering the postshock pressure field reasonably predicts the interface trajectory. The divergent RM instability at a single-mode interface is then examined. It is found that compressibility effect inhibits the initial growth rate, but produces a negligible influence on the subsequent instability growth. By performing the Fourier analysis of the interface morphologies extracted from schlieren images, the growths of harmonics are obtained. For low Mach numbers, the amplitude of each harmonic increases persistently with a gradually decaying growth rate at the early stage and later freezes out. For moderate Mach numbers, the amplitude of each harmonic suffers a quick drop after saturation. The RT effect associated with interface deceleration provides a substantial inhibition on the growths of harmonics. As a result, the divergent RM instability presents very weak nonlinearity at the whole stage. Particularly, higher-Mach-number cases present weaker nonlinearity due to stronger RT effect there. Reasonable agreement between the experiment and the nonlinear prediction of Wang et al. (Reference Wang, Wu, Guo, Ye, Liu, Zhang and He2015) considering RT effect for the growths of the first three harmonics is obtained, which confirms the present analysis. The present finding provides deep insights into the regimes of divergent RM instability.
$_6$ interface under four Mach numbers. The cylindrical divergent shock is generated in a novel shock tube designed based on shock dynamics theory. The single-mode interface is created with an advanced soap-film technique. The unperturbed case is first examined to obtain the background flow. It is found that the interface moves uniformly at the early stage, and subsequently decelerates. The stronger the incident shock, the larger the interface deceleration. An approximate 1-D model considering the postshock pressure field reasonably predicts the interface trajectory. The divergent RM instability at a single-mode interface is then examined. It is found that compressibility effect inhibits the initial growth rate, but produces a negligible influence on the subsequent instability growth. By performing the Fourier analysis of the interface morphologies extracted from schlieren images, the growths of harmonics are obtained. For low Mach numbers, the amplitude of each harmonic increases persistently with a gradually decaying growth rate at the early stage and later freezes out. For moderate Mach numbers, the amplitude of each harmonic suffers a quick drop after saturation. The RT effect associated with interface deceleration provides a substantial inhibition on the growths of harmonics. As a result, the divergent RM instability presents very weak nonlinearity at the whole stage. Particularly, higher-Mach-number cases present weaker nonlinearity due to stronger RT effect there. Reasonable agreement between the experiment and the nonlinear prediction of Wang et al. (Reference Wang, Wu, Guo, Ye, Liu, Zhang and He2015) considering RT effect for the growths of the first three harmonics is obtained, which confirms the present analysis. The present finding provides deep insights into the regimes of divergent RM instability.
Funding
This work was supported by the National Natural Science Foundation of China (nos. 12072341, 12122213 and 12388101), the National Key Research and Development Program of China (2022YFF0504500) and the Strategic Priority Research Program of Chinese Academy of Science (XDB0500301).
Declaration of interests
The authors report no conflict of interest.























