



1. Introduction
The motion of a viscous fluid around a solid body is known to generate viscous stresses that can affect both momentum transport and the forces experienced by the body. For an incompressible flow, it is easily proved that non-zero viscous stresses do not contribute to momentum transport in regions where the flow is irrotational (Batchelor Reference Batchelor1967), i.e. momentum transport is governed by the Euler equations for inviscid flow. This central result underpins the use of potential flow theory in a range of contexts, including calculation of the flows generated by aerofoils at high Reynolds number (Anderson Reference Anderson1991) and solid bodies executing high-frequency oscillations (Crighton Reference Crighton1983). In both these examples, the effects of vorticity may be confined to thin regions immediately adjacent to the solid body or in localised regions away from it (such as vortices shed from an aerofoil). In addition to momentum transport, it is often taken that viscous stresses do not contribute to the forces and torques experienced by a body in an incompressible viscous potential flow (Pozrikidis Reference Pozrikidis2011). This has enabled the widespread use of inviscid flow theory, which is distinct from viscous potential flow, to compute these loads.
This use of inviscid theory was the subject of a detailed examination by Joseph, Liao & Hu (Reference Joseph, Liao and Hu1993) who employed a combination of (i) complex-variable methods for two-dimensional flows, and (ii) an energy argument for three-dimensional flows generated by purely translating bodies satisfying the no-penetration condition, e.g. a solid body or a bubble that does not deform, which shall collectively be referred to as ‘rigid bodies’. This analysis was repeated and extended to viscoelastic and second-order fluids by Joseph & Liao (Reference Joseph and Liao1994). Specifically, Joseph et al. (Reference Joseph, Liao and Hu1993) examined the force and torque on a rigid body in an unbounded and incompressible viscous potential flow. That is, a flow satisfying the incompressible Navier–Stokes equations with zero vorticity throughout the flow domain that invokes the no-penetration condition on the body in question. Such a flow is rarely encountered in practice, with a notable exception being the steady two-dimensional flow generated by a rotating cylinder, whose flow mimics that of a point vortex.
For two-dimensional flows, Joseph et al. (Reference Joseph, Liao and Hu1993) proved that the force experienced by the body is independent of the fluid viscosity. However, they found that the torque exerted by the fluid on the body depends on the product of the fluid viscosity and its circulation. This somewhat unusual result appears to be rarely (if ever) referenced; it recovers the required torque experienced by a steadily rotating cylinder. These previous results made use of a complex-variable form of Gauss’ theorem, connecting flow properties at the body's surface to their behaviour at infinity. For three-dimensional flows, Joseph et al. (Reference Joseph, Liao and Hu1993) considered the drag component of the force for pure translational motion of a rigid body and proved that it does not depend on viscosity. This used an alternative energy argument. Other components of the force and other types of motion were not considered, and neither was the torque in a three-dimensional flow.
It thus remains to be seen whether these unanalysed force components and the force/torque in a general three-dimensional flow depend on viscosity for an incompressible viscous potential flow. In addition, whether the findings of Joseph et al. (Reference Joseph, Liao and Hu1993) hold for bodies/surfaces that do not invoke the no-penetration condition, e.g. a deformable bubble, an elastic solid or a closed surface away from a body. The effect of relaxing this no-penetration condition, and the applicability of the results of Joseph et al. (Reference Joseph, Liao and Hu1993) to flows that contain regions of non-zero vorticity, are currently unreported. This collective gap in the literature provides the motivation for the present study.
We examine the viscous force and torque which arises from the deviatoric (viscous) part of the stress tensor. These loads are calculated on an arbitrary closed surface,  $S$, along which the flow is irrotational locally, i.e. flow away from this surface is arbitrary and can contain regions of non-zero vorticity. Such a surface is henceforth termed an ‘irrotational surface’. Moreover, the flow domain can be bounded or unbounded. This is in contrast to Joseph et al. (Reference Joseph, Liao and Hu1993) who considered the surface upon which the force and torque are calculated to be that of a rigid body. They also required the flow to be unbounded and irrotational globally, i.e. zero vorticity everywhere. Under our broader assumptions, we report a generalisation of the proofs provided by Joseph et al. (Reference Joseph, Liao and Hu1993) to (i) any closed surface,
$S$, along which the flow is irrotational locally, i.e. flow away from this surface is arbitrary and can contain regions of non-zero vorticity. Such a surface is henceforth termed an ‘irrotational surface’. Moreover, the flow domain can be bounded or unbounded. This is in contrast to Joseph et al. (Reference Joseph, Liao and Hu1993) who considered the surface upon which the force and torque are calculated to be that of a rigid body. They also required the flow to be unbounded and irrotational globally, i.e. zero vorticity everywhere. Under our broader assumptions, we report a generalisation of the proofs provided by Joseph et al. (Reference Joseph, Liao and Hu1993) to (i) any closed surface,  $S$, (ii) the complete force and torque vectors on this surface in both two and three dimensions, (iii) any steady or unsteady flow in a bounded or unbounded domain and, critically, (iv) flows that contain vorticity provided the vorticity is zero along the closed surface,
$S$, (ii) the complete force and torque vectors on this surface in both two and three dimensions, (iii) any steady or unsteady flow in a bounded or unbounded domain and, critically, (iv) flows that contain vorticity provided the vorticity is zero along the closed surface,  $S$. Results for the viscous force are given in § 2 whereas those for the viscous torque are reported in § 3; their results are summarised in § 4 with conclusions given in § 5. For completeness, a simpler proof for a surface that encloses all regions of vorticity in an unbounded flow is reported in Appendix A. Identical formulae for the viscous force and torque are recovered despite these imposed restrictions.
$S$. Results for the viscous force are given in § 2 whereas those for the viscous torque are reported in § 3; their results are summarised in § 4 with conclusions given in § 5. For completeness, a simpler proof for a surface that encloses all regions of vorticity in an unbounded flow is reported in Appendix A. Identical formulae for the viscous force and torque are recovered despite these imposed restrictions.
2. Force calculation
The force exerted on the closed surface,  $S$, by the fluid that surrounds it, is
$S$, by the fluid that surrounds it, is
 \begin{equation} \boldsymbol{F} = \int_S \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{T}\,{\rm d} S, \end{equation}
\begin{equation} \boldsymbol{F} = \int_S \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{T}\,{\rm d} S, \end{equation}
where  $\boldsymbol {T}$ is the stress tensor of the fluid and
$\boldsymbol {T}$ is the stress tensor of the fluid and  $\boldsymbol {n}$ is the outward normal vector to the surface; see figure 1. The constitutive equation for a viscous incompressible flow is
$\boldsymbol {n}$ is the outward normal vector to the surface; see figure 1. The constitutive equation for a viscous incompressible flow is
 \begin{equation} \boldsymbol{T} ={-}p \boldsymbol{I} + 2 \mu \boldsymbol{e}, \end{equation}
\begin{equation} \boldsymbol{T} ={-}p \boldsymbol{I} + 2 \mu \boldsymbol{e}, \end{equation}
where  $p$ is the pressure field,
$p$ is the pressure field,  $\mu$ is the shear viscosity,
$\mu$ is the shear viscosity,  $\boldsymbol {I}$ is the identity tensor and
$\boldsymbol {I}$ is the identity tensor and  $\boldsymbol {e}$ is the rate-of-strain tensor. For all irrotational flows, the spin tensor is zero which establishes that the velocity gradient tensor is equal to the rate-of-strain tensor, i.e.
$\boldsymbol {e}$ is the rate-of-strain tensor. For all irrotational flows, the spin tensor is zero which establishes that the velocity gradient tensor is equal to the rate-of-strain tensor, i.e.  $\boldsymbol {e} = \boldsymbol {\nabla } \boldsymbol {u}$, where
$\boldsymbol {e} = \boldsymbol {\nabla } \boldsymbol {u}$, where  $\boldsymbol {u}$ is the velocity field, i.e. the velocity gradient tensor is symmetric. This fact appears to have been overlooked by Joseph et al. (Reference Joseph, Liao and Hu1993), who used the notation
$\boldsymbol {u}$ is the velocity field, i.e. the velocity gradient tensor is symmetric. This fact appears to have been overlooked by Joseph et al. (Reference Joseph, Liao and Hu1993), who used the notation  $D[\boldsymbol {u}]$ to refer to the symmetric part of
$D[\boldsymbol {u}]$ to refer to the symmetric part of  $\boldsymbol {\nabla } \boldsymbol {u}$ and made no mention of this identity when the flow is irrotational (their central focus). Substituting this identity and (2.2) into (2.1) gives
$\boldsymbol {\nabla } \boldsymbol {u}$ and made no mention of this identity when the flow is irrotational (their central focus). Substituting this identity and (2.2) into (2.1) gives
 \begin{equation} \boldsymbol{F} ={-} \int_S p \boldsymbol{n}\,{\rm d} S + 2 \mu \int_S \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{\nabla} \boldsymbol{u} \,{\rm d} S. \end{equation}
\begin{equation} \boldsymbol{F} ={-} \int_S p \boldsymbol{n}\,{\rm d} S + 2 \mu \int_S \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{\nabla} \boldsymbol{u} \,{\rm d} S. \end{equation}
Note that the pressure field,  $p$, is independent of viscosity when the flow is irrotational everywhere, an assumption that we do not impose in this study.
$p$, is independent of viscosity when the flow is irrotational everywhere, an assumption that we do not impose in this study.

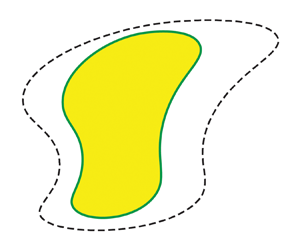
Figure 1. Schematic showing a closed irrotational surface,  $S$, that encloses a body or any other fluid region; presence of the body is not required. The position vector,
$S$, that encloses a body or any other fluid region; presence of the body is not required. The position vector,  $\boldsymbol {r}$, relative to a chosen origin,
$\boldsymbol {r}$, relative to a chosen origin,  $\boldsymbol {0}$, and the unit outward normal vector,
$\boldsymbol {0}$, and the unit outward normal vector,  $\boldsymbol {n}$, are shown. The flow away from the surface,
$\boldsymbol {n}$, are shown. The flow away from the surface,  $S$, i.e. either interior or exterior to it, can be irrotational or contain vorticity. The fluid region,
$S$, i.e. either interior or exterior to it, can be irrotational or contain vorticity. The fluid region,  $V$, outside of
$V$, outside of  $S$ is used in the alternative and simpler analysis reported in Appendix A.
$S$ is used in the alternative and simpler analysis reported in Appendix A.
The focus of this study is on the second term in (2.3) that is often referred to as the ‘viscous force’, which we identify by
 \begin{equation} \boldsymbol{F}_v \equiv 2 \mu \int_S \boldsymbol{n} \boldsymbol{\cdot}\boldsymbol{\nabla} \boldsymbol{u} \,{\rm d} S. \end{equation}
\begin{equation} \boldsymbol{F}_v \equiv 2 \mu \int_S \boldsymbol{n} \boldsymbol{\cdot}\boldsymbol{\nabla} \boldsymbol{u} \,{\rm d} S. \end{equation}
This defines the contribution from the (non-zero) deviatoric part of the stress tensor in a viscous potential flow. It is distinct from inviscid flow for which the viscous force does not exist. We calculate the value of this viscous force,  $\boldsymbol {F}_v$, for a general viscous potential flow in two and three spatial dimensions.
$\boldsymbol {F}_v$, for a general viscous potential flow in two and three spatial dimensions.
2.1. Two-dimensional flows
For a two-dimensional plane flow, the surface,  $S$, corresponds to a closed line contour in the two-dimensional Cartesian plane that is projected into an infinite cylinder in the direction normal to the plane. This closed line contour is paramaterised by a variable,
$S$, corresponds to a closed line contour in the two-dimensional Cartesian plane that is projected into an infinite cylinder in the direction normal to the plane. This closed line contour is paramaterised by a variable,  $s \in [0, s_{max})$, and the flow is independent of the Cartesian coordinate normal to the plane. The corresponding two-dimensional Cartesian components of the viscous force per unit cylinder length in this plane, denoted
$s \in [0, s_{max})$, and the flow is independent of the Cartesian coordinate normal to the plane. The corresponding two-dimensional Cartesian components of the viscous force per unit cylinder length in this plane, denoted  $f_i$ with
$f_i$ with  $i = 1$ and 2, follows from (2.4),
$i = 1$ and 2, follows from (2.4),
 \begin{equation} f_i = 2 \mu \int_0^{s_{max}} \epsilon_{km} \frac{\partial u_i}{\partial x_k} \frac{{\rm d}\kern 0.06em x_m}{{\rm d} s} {\rm d} s, \end{equation}
\begin{equation} f_i = 2 \mu \int_0^{s_{max}} \epsilon_{km} \frac{\partial u_i}{\partial x_k} \frac{{\rm d}\kern 0.06em x_m}{{\rm d} s} {\rm d} s, \end{equation}
where  $\epsilon _{km}$ is the two-dimensional Levi-Civita symbol and the Cartesian components of the position vector,
$\epsilon _{km}$ is the two-dimensional Levi-Civita symbol and the Cartesian components of the position vector,  $\boldsymbol {r}$, and velocity field,
$\boldsymbol {r}$, and velocity field,  $\boldsymbol {u}$, are denoted
$\boldsymbol {u}$, are denoted  $x_i$ and
$x_i$ and  $u_i$, respectively.
$u_i$, respectively.
Each component of  $f_i$ is considered separately. For
$f_i$ is considered separately. For  $i=1$, (2.5) gives
$i=1$, (2.5) gives
 \begin{equation} f_1 = 2 \mu \int_0^{s_{max}} \frac{\partial u_1}{\partial x_1} \frac{{\rm d}\kern 0.06em x_2}{{\rm d} s} - \frac{\partial u_1}{\partial x_2} \frac{{\rm d}\kern 0.06em x_1}{{\rm d} s} {\rm d} s. \end{equation}
\begin{equation} f_1 = 2 \mu \int_0^{s_{max}} \frac{\partial u_1}{\partial x_1} \frac{{\rm d}\kern 0.06em x_2}{{\rm d} s} - \frac{\partial u_1}{\partial x_2} \frac{{\rm d}\kern 0.06em x_1}{{\rm d} s} {\rm d} s. \end{equation}
Making use of the continuity equation for incompressible flow, and noting that the flow is irrotational along  $s \in [0, s_{max})$, then gives
$s \in [0, s_{max})$, then gives
 \begin{equation} f_1 ={-} 2 \mu \int_0^{s_{max}} \frac{\partial u_2}{\partial x_1} \frac{{\rm d}\kern 0.06em x_1}{{\rm d} s} + \frac{\partial u_2}{\partial x_2} \frac{{\rm d}\kern 0.06em x_2}{{\rm d} s} {\rm d} s ={-} 2 \mu \int_0^{s_{max}} \frac{\partial u_2}{\partial s} {\rm d} s, \end{equation}
\begin{equation} f_1 ={-} 2 \mu \int_0^{s_{max}} \frac{\partial u_2}{\partial x_1} \frac{{\rm d}\kern 0.06em x_1}{{\rm d} s} + \frac{\partial u_2}{\partial x_2} \frac{{\rm d}\kern 0.06em x_2}{{\rm d} s} {\rm d} s ={-} 2 \mu \int_0^{s_{max}} \frac{\partial u_2}{\partial s} {\rm d} s, \end{equation}from which it immediately follows that
 \begin{equation} f_1 = 0, \end{equation}
\begin{equation} f_1 = 0, \end{equation}
because the line contour is closed and the velocity field is continuous. The same result obviously holds for  $i=2$, i.e.
$i=2$, i.e.  $f_i = 0$ with
$f_i = 0$ with  $i = 1$ and 2.
$i = 1$ and 2.
This analysis therefore proves that the viscous force on any irrotational surface,  $S$, that is closed in the plane is identically zero, i.e.
$S$, that is closed in the plane is identically zero, i.e.
 \begin{equation} \boldsymbol{F}_v =\boldsymbol{0}. \end{equation}
\begin{equation} \boldsymbol{F}_v =\boldsymbol{0}. \end{equation}
This result applies to any two-dimensional flow that may have vorticity away from  $S$.
$S$.
2.2. Three-dimensional flows
For a general three-dimensional flow, the closed irrotational surface,  $S$, is parameterised by two independent variables,
$S$, is parameterised by two independent variables,  $v \in [0, v_{max})$ and
$v \in [0, v_{max})$ and  $w \in [0, w_{max})$, which form a rectangular domain. The three Cartesian components,
$w \in [0, w_{max})$, which form a rectangular domain. The three Cartesian components,  $F_i$ where
$F_i$ where  $i = 1, 2, 3$, of the viscous force,
$i = 1, 2, 3$, of the viscous force,  $\boldsymbol {F}_v$, in (2.4) can then be written as
$\boldsymbol {F}_v$, in (2.4) can then be written as
 \begin{equation} F_i = 2 \mu \int_0^{w_{max}} \int_0^{v_{max}} \epsilon_{jmn} \frac{\partial u_i}{\partial x_j} \frac{\partial x_m}{\partial v} \frac{\partial x_n}{\partial w} {\rm d} v \,{\rm d} w, \end{equation}
\begin{equation} F_i = 2 \mu \int_0^{w_{max}} \int_0^{v_{max}} \epsilon_{jmn} \frac{\partial u_i}{\partial x_j} \frac{\partial x_m}{\partial v} \frac{\partial x_n}{\partial w} {\rm d} v \,{\rm d} w, \end{equation}
where  $\epsilon _{jmn}$ is the three-dimensional Levi-Civita symbol, and the Cartesian components of the position vector,
$\epsilon _{jmn}$ is the three-dimensional Levi-Civita symbol, and the Cartesian components of the position vector,  $\boldsymbol {r}$, and velocity field,
$\boldsymbol {r}$, and velocity field,  $\boldsymbol {u},$ are
$\boldsymbol {u},$ are  $x_i$ and
$x_i$ and  $u_i$, respectively. As before, we examine the components of (2.10) one at a time. For
$u_i$, respectively. As before, we examine the components of (2.10) one at a time. For  $i=1$, and by making use of the continuity equation for incompressible flow, (2.10) can be written as
$i=1$, and by making use of the continuity equation for incompressible flow, (2.10) can be written as
 \begin{align} F_1 &= 2 \mu \int_0^{w_{max}} \int_0^{v_{max}} \left(\frac{\partial u_2}{\partial x_m} \frac{\partial x_m}{\partial w}\right) \frac{\partial x_3}{\partial v}- \left(\frac{\partial u_2}{\partial x_m} \frac{\partial x_m}{\partial v}\right) \frac{\partial x_3}{\partial w} \nonumber\\ &\quad + \left(\frac{\partial u_3}{\partial x_m} \frac{\partial x_m}{\partial v}\right) \frac{\partial x_2}{\partial w}- \left(\frac{\partial u_3}{\partial x_m} \frac{\partial x_m}{\partial w}\right) \frac{\partial x_2}{\partial v}{\rm d} v\,{\rm d} w, \end{align}
\begin{align} F_1 &= 2 \mu \int_0^{w_{max}} \int_0^{v_{max}} \left(\frac{\partial u_2}{\partial x_m} \frac{\partial x_m}{\partial w}\right) \frac{\partial x_3}{\partial v}- \left(\frac{\partial u_2}{\partial x_m} \frac{\partial x_m}{\partial v}\right) \frac{\partial x_3}{\partial w} \nonumber\\ &\quad + \left(\frac{\partial u_3}{\partial x_m} \frac{\partial x_m}{\partial v}\right) \frac{\partial x_2}{\partial w}- \left(\frac{\partial u_3}{\partial x_m} \frac{\partial x_m}{\partial w}\right) \frac{\partial x_2}{\partial v}{\rm d} v\,{\rm d} w, \end{align}which immediately simplifies to
 \begin{equation} F_1 = 2 \mu \int_0^{w_{max}} \int_0^{v_{max}} \frac{\partial u_2}{\partial w} \frac{\partial x_3}{\partial v} - \frac{\partial u_3}{\partial w} \frac{\partial x_2}{\partial v} + \frac{\partial u_3}{\partial v} \frac{\partial x_2}{\partial w} - \frac{\partial u_2}{\partial v} \frac{\partial x_3}{\partial w}{\rm d} v \,{\rm d} w. \end{equation}
\begin{equation} F_1 = 2 \mu \int_0^{w_{max}} \int_0^{v_{max}} \frac{\partial u_2}{\partial w} \frac{\partial x_3}{\partial v} - \frac{\partial u_3}{\partial w} \frac{\partial x_2}{\partial v} + \frac{\partial u_3}{\partial v} \frac{\partial x_2}{\partial w} - \frac{\partial u_2}{\partial v} \frac{\partial x_3}{\partial w}{\rm d} v \,{\rm d} w. \end{equation}Integrating each term in (2.12) by parts, while noting that the region of integration is a rectangular domain, then gives
 \begin{align} F_1 = 2 \mu \left\{\int_0^{v_{max}} \left[u_2 \frac{\partial x_3}{\partial v} - u_3 \frac{\partial x_2}{\partial v}\right]_{w=0}^{w=w_{max}} {\rm d} v + \int_0^{w_{max}} \left[u_3 \frac{\partial x_2}{\partial w} - u_2 \frac{\partial x_3}{\partial w}\right]_{v=0}^{v=v_{max}} {\rm d} w\right\}. \end{align}
\begin{align} F_1 = 2 \mu \left\{\int_0^{v_{max}} \left[u_2 \frac{\partial x_3}{\partial v} - u_3 \frac{\partial x_2}{\partial v}\right]_{w=0}^{w=w_{max}} {\rm d} v + \int_0^{w_{max}} \left[u_3 \frac{\partial x_2}{\partial w} - u_2 \frac{\partial x_3}{\partial w}\right]_{v=0}^{v=v_{max}} {\rm d} w\right\}. \end{align} The Jacobian of the  $(v,w)$-parametrisation of
$(v,w)$-parametrisation of  $S$ vanishes at any of its singular points. Because the velocity field is continuous it then follows that the integrands in (2.13) also vanish, regardless of whether the surface,
$S$ vanishes at any of its singular points. Because the velocity field is continuous it then follows that the integrands in (2.13) also vanish, regardless of whether the surface,  $S$, is singly or multiply connected, e.g. a sphere or a torus. This gives the required result,
$S$, is singly or multiply connected, e.g. a sphere or a torus. This gives the required result,
 \begin{equation} F_1 = 0. \end{equation}
\begin{equation} F_1 = 0. \end{equation} The remaining components of the viscous force,  $\boldsymbol {F}_v$, can be obtained by interchanging indices in the above analysis, i.e.
$\boldsymbol {F}_v$, can be obtained by interchanging indices in the above analysis, i.e.  $F_i = 0$ for
$F_i = 0$ for  $i = 1, 2, 3$. This gives the required result,
$i = 1, 2, 3$. This gives the required result,
 \begin{equation} \boldsymbol{F}_v =\boldsymbol{0}. \end{equation}
\begin{equation} \boldsymbol{F}_v =\boldsymbol{0}. \end{equation} The collective analysis in this § 2 thus proves that the viscous force acting on any closed irrotational surface,  $S$, is identically zero, regardless of its dimensionality. We emphasise that this result applies to both steady and unsteady flows in bounded or unbounded domains, and to flows that may contain vorticity away from
$S$, is identically zero, regardless of its dimensionality. We emphasise that this result applies to both steady and unsteady flows in bounded or unbounded domains, and to flows that may contain vorticity away from  $S$.
$S$.
3. Torque calculation
Next, we examine the torque exerted by the fluid on the same irrotational surface,  $S$,
$S$,
 \begin{equation} \boldsymbol{\varLambda} = \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{T})\,{\rm d} S, \end{equation}
\begin{equation} \boldsymbol{\varLambda} = \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{T})\,{\rm d} S, \end{equation}
where  $\boldsymbol {r}$ is the position vector from some chosen origin; see figure 1. Substituting (2.2) into (3.1) gives
$\boldsymbol {r}$ is the position vector from some chosen origin; see figure 1. Substituting (2.2) into (3.1) gives
 \begin{equation} \boldsymbol{\varLambda} ={-} \int_S (\boldsymbol{r} \times \boldsymbol{n}) p\,{\rm d} S + 2 \mu \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e}) \,{\rm d} S, \end{equation}
\begin{equation} \boldsymbol{\varLambda} ={-} \int_S (\boldsymbol{r} \times \boldsymbol{n}) p\,{\rm d} S + 2 \mu \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e}) \,{\rm d} S, \end{equation}and we again examine the contribution from the deviatoric part of the stress tensor, i.e.
 \begin{equation} \boldsymbol{\varLambda}_v \equiv 2 \mu \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v \equiv 2 \mu \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S, \end{equation}
which is often termed the ‘viscous torque’. Because the velocity gradient tensor is symmetric for an irrotational flow, i.e.  $\boldsymbol {e} = \boldsymbol {\nabla } \boldsymbol {u}$, as discussed above, (3.3) becomes
$\boldsymbol {e} = \boldsymbol {\nabla } \boldsymbol {u}$, as discussed above, (3.3) becomes
 \begin{equation} \boldsymbol{\varLambda}_v \equiv 2 \mu \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot}\boldsymbol{\nabla} \boldsymbol{u})\,{\rm d} S. \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v \equiv 2 \mu \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot}\boldsymbol{\nabla} \boldsymbol{u})\,{\rm d} S. \end{equation}
We now calculate the value of  $\boldsymbol {\varLambda }_v$ for both two- and three-dimensional flows.
$\boldsymbol {\varLambda }_v$ for both two- and three-dimensional flows.
3.1. Two-dimensional flows
The irrotational surface,  $S$, its parameterisation in the variable,
$S$, its parameterisation in the variable,  $s$, and all other symbols are as described in § 2.1. The torque vector is always normal to the plane of a two-dimensional flow. Therefore, the viscous torque for any two-dimensional flow in the Cartesian
$s$, and all other symbols are as described in § 2.1. The torque vector is always normal to the plane of a two-dimensional flow. Therefore, the viscous torque for any two-dimensional flow in the Cartesian  $(x_1, x_2)$-plane can be expressed as
$(x_1, x_2)$-plane can be expressed as
 \begin{equation} \boldsymbol{\varLambda}_v = \varLambda L \hat{\boldsymbol{x}}_3, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v = \varLambda L \hat{\boldsymbol{x}}_3, \end{equation}
where  $\hat {\boldsymbol {x}}_3$ is the basis vector in the Cartesian
$\hat {\boldsymbol {x}}_3$ is the basis vector in the Cartesian  $x_3$-direction orthogonal to the
$x_3$-direction orthogonal to the  $(x_1, x_2)$-plane and
$(x_1, x_2)$-plane and  $L$ is a nominal length in the same direction. The scalar torque per unit length,
$L$ is a nominal length in the same direction. The scalar torque per unit length,  $\varLambda$, then immediately follows from (3.4),
$\varLambda$, then immediately follows from (3.4),
 \begin{equation} \varLambda = 2 \mu \int_0^{s_{{max}}} \epsilon_{jk} \epsilon_{mn} x_j \frac{\partial u_k}{\partial x_m} \frac{{\rm d}\kern 0.06em x_n}{{\rm d} s}{\rm d} s. \end{equation}
\begin{equation} \varLambda = 2 \mu \int_0^{s_{{max}}} \epsilon_{jk} \epsilon_{mn} x_j \frac{\partial u_k}{\partial x_m} \frac{{\rm d}\kern 0.06em x_n}{{\rm d} s}{\rm d} s. \end{equation}
This can be simplified using the continuity equation for incompressible flow and by expressing the product,  $\epsilon _{jk} \epsilon _{mn}$, in terms of the Kronecker delta, giving
$\epsilon _{jk} \epsilon _{mn}$, in terms of the Kronecker delta, giving
 \begin{equation} \varLambda = 2 \mu \int_0^{s_{{max}}} x_j \frac{\partial u_j}{\partial x_k} \frac{{\rm d}\kern 0.06em x_k}{{\rm d} s} {\rm d} s = 2 \mu \int_0^{s_{{max}}} x_j \frac{\partial u_j}{\partial s} {\rm d} s. \end{equation}
\begin{equation} \varLambda = 2 \mu \int_0^{s_{{max}}} x_j \frac{\partial u_j}{\partial x_k} \frac{{\rm d}\kern 0.06em x_k}{{\rm d} s} {\rm d} s = 2 \mu \int_0^{s_{{max}}} x_j \frac{\partial u_j}{\partial s} {\rm d} s. \end{equation}Integrating by parts yields
 \begin{equation} \varLambda ={-} 2 \mu \int_0^{s_{{max}}} u_j \frac{\partial x_j}{\partial s} {\rm d} s, \end{equation}
\begin{equation} \varLambda ={-} 2 \mu \int_0^{s_{{max}}} u_j \frac{\partial x_j}{\partial s} {\rm d} s, \end{equation}
where the integral is formally the circulation,  $\varGamma$, around the closed line contour. It then follows from (3.5) that the viscous torque is
$\varGamma$, around the closed line contour. It then follows from (3.5) that the viscous torque is
 \begin{equation} \boldsymbol{\varLambda}_v ={-} 2 \mu \varGamma L\ \hat{\boldsymbol{x}}_3. \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v ={-} 2 \mu \varGamma L\ \hat{\boldsymbol{x}}_3. \end{equation} This proves that the viscous torque on any irrotational surface,  $S$, that is closed in the plane, depends on viscosity provided the circulation is non-zero around its closed line contour in the plane.
$S$, that is closed in the plane, depends on viscosity provided the circulation is non-zero around its closed line contour in the plane.
3.2. Three-dimensional flows
Using the surface paramaterisation for three-dimensional flows in § 2.2, the Cartesian components of the viscous torque,  $\boldsymbol {\varLambda }_v$, in (3.4), denoted
$\boldsymbol {\varLambda }_v$, in (3.4), denoted  $\varLambda _i$, become
$\varLambda _i$, become
 \begin{equation} \varLambda_i = 2 \mu \int_0^{w_{{max}}} \int_0^{v_{{max}}} \epsilon_{ijk} \epsilon_{mpq} x_j \frac{\partial u_k}{\partial x_m} \frac{\partial x_p}{\partial v} \frac{\partial x_q}{\partial w} {\rm d} v\,{\rm d} w. \end{equation}
\begin{equation} \varLambda_i = 2 \mu \int_0^{w_{{max}}} \int_0^{v_{{max}}} \epsilon_{ijk} \epsilon_{mpq} x_j \frac{\partial u_k}{\partial x_m} \frac{\partial x_p}{\partial v} \frac{\partial x_q}{\partial w} {\rm d} v\,{\rm d} w. \end{equation}Expressing the product of the Levi-Civita pseudotensors in terms of the identity tensor gives
 \begin{equation} \varLambda_i = 2 \mu \int_0^{w_{{max}}} \int_0^{v_{{max}}} x_j \left(\frac{\partial u_i}{\partial w} \frac{\partial x_j}{\partial v} - \frac{\partial u_i}{\partial v} \frac{\partial x_j}{\partial w} + \frac{\partial u_j}{\partial v} \frac{\partial x_i}{\partial w} - \frac{\partial u_j}{\partial w} \frac{\partial x_i}{\partial v}\right){\rm d} v\,{\rm d} w, \end{equation}
\begin{equation} \varLambda_i = 2 \mu \int_0^{w_{{max}}} \int_0^{v_{{max}}} x_j \left(\frac{\partial u_i}{\partial w} \frac{\partial x_j}{\partial v} - \frac{\partial u_i}{\partial v} \frac{\partial x_j}{\partial w} + \frac{\partial u_j}{\partial v} \frac{\partial x_i}{\partial w} - \frac{\partial u_j}{\partial w} \frac{\partial x_i}{\partial v}\right){\rm d} v\,{\rm d} w, \end{equation}which simplifies using integrating by parts to produce
 \begin{equation} \varLambda_i = 2 \mu \left(\int_0^{v_{{max}}} \varGamma_w \frac{\partial x_i}{\partial v} {\rm d} v - \int_0^{w_{{max}}} \varGamma_v \frac{\partial x_i}{\partial w} {\rm d} w\right),\end{equation}
\begin{equation} \varLambda_i = 2 \mu \left(\int_0^{v_{{max}}} \varGamma_w \frac{\partial x_i}{\partial v} {\rm d} v - \int_0^{w_{{max}}} \varGamma_v \frac{\partial x_i}{\partial w} {\rm d} w\right),\end{equation}
where  $\varGamma _v$ and
$\varGamma _v$ and  $\varGamma _w$ are evaluated in the
$\varGamma _w$ are evaluated in the  $v$- and
$v$- and  $w$-directions, respectively, and are defined by
$w$-directions, respectively, and are defined by
 \begin{equation} \varGamma_v \equiv \int_0^{v_{{max}}} u_j \frac{\partial x_j}{\partial v}{\rm d} v,\quad \varGamma_w \equiv \int_0^{w_{{max}}} u_j \frac{\partial x_j}{\partial w} {\rm d} w. \end{equation}
\begin{equation} \varGamma_v \equiv \int_0^{v_{{max}}} u_j \frac{\partial x_j}{\partial v}{\rm d} v,\quad \varGamma_w \equiv \int_0^{w_{{max}}} u_j \frac{\partial x_j}{\partial w} {\rm d} w. \end{equation} Because  $S$ is an irrotational surface,
$S$ is an irrotational surface,  $\varGamma _v$ is independent of
$\varGamma _v$ is independent of  $w$ and
$w$ and  $\varGamma _w$ is independent of
$\varGamma _w$ is independent of  $v$, i.e. both
$v$, i.e. both  $\varGamma _v$ and
$\varGamma _v$ and  $\varGamma _w$ are constants, with (3.12) becoming
$\varGamma _w$ are constants, with (3.12) becoming
 \begin{equation} \varLambda_i = 2 \mu (\varGamma_w x_i|_{v=0}^{v=v_{max}} - \varGamma_v x_i|_{w=0}^{w=w_{max}}). \end{equation}
\begin{equation} \varLambda_i = 2 \mu (\varGamma_w x_i|_{v=0}^{v=v_{max}} - \varGamma_v x_i|_{w=0}^{w=w_{max}}). \end{equation}
For  $(v,w)$-parameterisations without singularities, e.g. for the surface of a torus, (3.14) gives
$(v,w)$-parameterisations without singularities, e.g. for the surface of a torus, (3.14) gives  $\varLambda _i = 0$ because the positions,
$\varLambda _i = 0$ because the positions,  $x_i$, are coincident at their respective
$x_i$, are coincident at their respective  $v$ and
$v$ and  $w$ limits. This result also holds for parameterisations with singularities, e.g. for the surface of a sphere, due to the mixed nature of the products in (3.14), e.g.
$w$ limits. This result also holds for parameterisations with singularities, e.g. for the surface of a sphere, due to the mixed nature of the products in (3.14), e.g.  $\varGamma _w$ must vanish when
$\varGamma _w$ must vanish when  $x_i |_{v=0}^{v=v_{max}} \neq 0$. The required result for the viscous torque is then
$x_i |_{v=0}^{v=v_{max}} \neq 0$. The required result for the viscous torque is then
 \begin{equation} \boldsymbol{\varLambda}_v = \boldsymbol{0}, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v = \boldsymbol{0}, \end{equation}which holds for singly and multiply connected surfaces, e.g. spheres and tori.
4. Summary
The results in §§ 2 and 3 prove that all components of the viscous force,  $\boldsymbol {F}_v$, on any closed irrotational surface,
$\boldsymbol {F}_v$, on any closed irrotational surface,  $S$, are always zero for both two and three-dimensional flows, i.e.
$S$, are always zero for both two and three-dimensional flows, i.e.
 \begin{equation} \boldsymbol{F}_v = \boldsymbol{0}. \end{equation}
\begin{equation} \boldsymbol{F}_v = \boldsymbol{0}. \end{equation}
The same is true for the viscous torque in three-dimensional flows only. In contrast, the viscous torque in a two-dimensional plane flow can be non-zero and dependent on viscosity, provided the circulation,  $\varGamma$, is also non-zero, i.e.
$\varGamma$, is also non-zero, i.e.
 \begin{equation}
\boldsymbol{\varLambda}_v = \left\{\begin{array}{@{}ll}
\boldsymbol{0}, & \text{`three-dimensional flows'}
,\\ - 2 \mu \varGamma L \ \hat{\boldsymbol{x}}_3 , &
\text{`two-dimensional flows'}, \end{array}\right.
\end{equation}
\begin{equation}
\boldsymbol{\varLambda}_v = \left\{\begin{array}{@{}ll}
\boldsymbol{0}, & \text{`three-dimensional flows'}
,\\ - 2 \mu \varGamma L \ \hat{\boldsymbol{x}}_3 , &
\text{`two-dimensional flows'}, \end{array}\right.
\end{equation}
where  $\hat {\boldsymbol {x}}_3$ is the basis vector orthogonal to the plane and
$\hat {\boldsymbol {x}}_3$ is the basis vector orthogonal to the plane and  $L$ is the nominal length in the same direction. Importantly, the viscous torque is independent of the chosen origin of
$L$ is the nominal length in the same direction. Importantly, the viscous torque is independent of the chosen origin of  $\boldsymbol {r}$ because the viscous force acting on
$\boldsymbol {r}$ because the viscous force acting on  $S$ is identically zero.
$S$ is identically zero.
These results differ fundamentally from those reported by Joseph et al. (Reference Joseph, Liao and Hu1993) who considered the viscous force and torque acting on a rigid body in an unbounded irrotational flow. The viscous torque and all components of the viscous force in a general three-dimensional flow were not considered. The formulae in (4.1) and (4.2) generalise the results of Joseph et al. (Reference Joseph, Liao and Hu1993) to all components of the viscous force and torque on any closed irrotational surface, regardless of the vorticity distribution away from this surface and whether the flow domain is bounded or unbounded.
5. Conclusions
The contribution of viscous (deviatoric) stresses to the force and torque experienced by an arbitrary closed irrotational surface has been derived. The flow can be steady or unsteady and in a bounded or unbounded domain. The existence of vorticity away from this surface is immaterial. An alternative and simpler analysis for an unbounded irrotational domain is reported in Appendix A, for which identical formulae are obtained.
This extends and completes the analysis of Joseph et al. (Reference Joseph, Liao and Hu1993) who assumed an unbounded flow that is irrotational everywhere, and calculated the forces and torques on the surface of a rigid body only. For three-dimensional flows, this previous analysis only considered the drag force experienced by a rigid body undergoing pure translation. The general analyses reported here encompass these previously studied cases and enable application to real viscous flows that inevitably contain regions of vorticity.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Unbounded irrotational flows
In this appendix, we present an alternative analysis more closely aligned to that of Joseph et al. (Reference Joseph, Liao and Hu1993). Specifically, we consider an unbounded flow that is irrotational everywhere outside the closed surface,  $S$, which may or may not coincide with a body's surface; in contrast to Joseph et al. (Reference Joseph, Liao and Hu1993) where
$S$, which may or may not coincide with a body's surface; in contrast to Joseph et al. (Reference Joseph, Liao and Hu1993) where  $S$ coincides with the surface of a rigid body. The velocity field is also assumed to vanish far from
$S$ coincides with the surface of a rigid body. The velocity field is also assumed to vanish far from  $S$ and the mass flux through
$S$ and the mass flux through  $S$ is zero. This analysis is more restrictive than that in §§ 2 and 3, which only requires the flow to be irrotational on the surface,
$S$ is zero. This analysis is more restrictive than that in §§ 2 and 3, which only requires the flow to be irrotational on the surface,  $S$; the flow can be bounded or unbounded. Even so and somewhat surprisingly, the derived formulae for the viscous force and torque are identical to those in §§ 2 and 3. This shows that the requirement in this appendix that the flow be unbounded and irrotational everywhere outside
$S$; the flow can be bounded or unbounded. Even so and somewhat surprisingly, the derived formulae for the viscous force and torque are identical to those in §§ 2 and 3. This shows that the requirement in this appendix that the flow be unbounded and irrotational everywhere outside  $S$ is an over constraint. The flow need only be irrotational on the surface for the formulae reported in this appendix to apply.
$S$ is an over constraint. The flow need only be irrotational on the surface for the formulae reported in this appendix to apply.
A.1. Force
Consider the two surfaces enclosing the unbounded fluid domain,  $V$, outside of the surface,
$V$, outside of the surface,  $S$; see figure 1. The first is the surface,
$S$; see figure 1. The first is the surface,  $S$, itself and the second is a surface far from it,
$S$, itself and the second is a surface far from it,  $S_\infty$. We note the velocity field varies as
$S_\infty$. We note the velocity field varies as  $| \boldsymbol {u} |\sim 1/ r^n$, as
$| \boldsymbol {u} |\sim 1/ r^n$, as  $r \to \infty$, where
$r \to \infty$, where  $r$ is the distance from a chosen origin enclosed by
$r$ is the distance from a chosen origin enclosed by  $S$ and
$S$ and  $n$ is a positive constant (Batchelor Reference Batchelor1967). All potential flows that decay to zero far from the body satisfy the following constraints:
$n$ is a positive constant (Batchelor Reference Batchelor1967). All potential flows that decay to zero far from the body satisfy the following constraints:  $n > 0$ for two-dimensional flows and
$n > 0$ for two-dimensional flows and  $n>1$ for three-dimensional flows (Batchelor Reference Batchelor1967). Therefore, the surface,
$n>1$ for three-dimensional flows (Batchelor Reference Batchelor1967). Therefore, the surface,  $S$, in the second term of (2.3) can be replaced by the joint surface,
$S$, in the second term of (2.3) can be replaced by the joint surface,  $S + S_\infty$, because the contribution from the surface,
$S + S_\infty$, because the contribution from the surface,  $S_\infty$, is always zero (with
$S_\infty$, is always zero (with  $\boldsymbol {n}$ being the inward normal to the volumetric fluid domain,
$\boldsymbol {n}$ being the inward normal to the volumetric fluid domain,  $V$). The resulting surface integral over
$V$). The resulting surface integral over  $S + S_\infty$ can then be replaced by the volume integral over the fluid domain,
$S + S_\infty$ can then be replaced by the volume integral over the fluid domain,  $V$, using Gauss’ theorem,
$V$, using Gauss’ theorem,
 \begin{equation} \boldsymbol{F}_v ={-} 2 \mu \int_V \nabla^2 \boldsymbol{u} \,{\rm d} V. \end{equation}
\begin{equation} \boldsymbol{F}_v ={-} 2 \mu \int_V \nabla^2 \boldsymbol{u} \,{\rm d} V. \end{equation}
Because  $\nabla ^2 \boldsymbol {u} = 0$ for any incompressible irrotational flow, (A1) becomes
$\nabla ^2 \boldsymbol {u} = 0$ for any incompressible irrotational flow, (A1) becomes
 \begin{equation} \boldsymbol{F}_v = \boldsymbol{0}. \end{equation}
\begin{equation} \boldsymbol{F}_v = \boldsymbol{0}. \end{equation} Equation (A2) proves that the deviatoric part of the stress tensor does not contribute to any component of the viscous force experienced by the surface,  $S$. This result holds for both two- and three-dimensional flows.
$S$. This result holds for both two- and three-dimensional flows.
A.2. Torque
To examine the viscous torque, we replace the domain of the integral in (3.3) by  $S + S_\infty$, where
$S + S_\infty$, where  $S_\infty$ is defined in § A.1, and make use of Gauss’ theorem, which gives
$S_\infty$ is defined in § A.1, and make use of Gauss’ theorem, which gives
 \begin{equation} \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S + \int_{S_\infty} \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S ={-} \int_V \boldsymbol{r} \times (\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{e}) - \boldsymbol{\epsilon}: \boldsymbol{e} \,{\rm d} V = \boldsymbol{0}, \end{equation}
\begin{equation} \int_S \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S + \int_{S_\infty} \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S ={-} \int_V \boldsymbol{r} \times (\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{e}) - \boldsymbol{\epsilon}: \boldsymbol{e} \,{\rm d} V = \boldsymbol{0}, \end{equation}
where  $\boldsymbol {n}$ is the inward normal to the volumetric fluid domain,
$\boldsymbol {n}$ is the inward normal to the volumetric fluid domain,  $V$, the Levi-Civita pseudotensor is
$V$, the Levi-Civita pseudotensor is  $\boldsymbol {\epsilon }$, and we have used the properties that (i)
$\boldsymbol {\epsilon }$, and we have used the properties that (i)  $\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {e} = \boldsymbol {0}$ for an incompressible irrotational flow, and (ii)
$\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {e} = \boldsymbol {0}$ for an incompressible irrotational flow, and (ii)  $\boldsymbol {\epsilon }: \boldsymbol {e} = \boldsymbol {0}$ because
$\boldsymbol {\epsilon }: \boldsymbol {e} = \boldsymbol {0}$ because  $\boldsymbol {e}$ is symmetric. Substituting (A3) into (3.3) yields
$\boldsymbol {e}$ is symmetric. Substituting (A3) into (3.3) yields
 \begin{equation} \boldsymbol{\varLambda}_v ={-} 2 \mu \int_{S_\infty} \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v ={-} 2 \mu \int_{S_\infty} \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e})\,{\rm d} S, \end{equation}
establishing that the viscous torque is zero provided the surface integral over  $S_\infty$ vanishes.
$S_\infty$ vanishes.
Again noting that the velocity field varies as  $| \boldsymbol {u} |\sim 1/ r^n$ for
$| \boldsymbol {u} |\sim 1/ r^n$ for  $r \to \infty$, (A4) vanishes when
$r \to \infty$, (A4) vanishes when  $n > 1$ and
$n > 1$ and  $n > 2$ for two- and three-dimensional flows, respectively; a stronger constraint than that required for the force in § A.1. Even so, these conditions are satisfied for all three-dimensional flows (Batchelor Reference Batchelor1967), including flows generated by multiply connected surfaces, e.g. tori. This establishes that the viscous torque (and the viscous force, see § A.1) vanishes for those flows, i.e.
$n > 2$ for two- and three-dimensional flows, respectively; a stronger constraint than that required for the force in § A.1. Even so, these conditions are satisfied for all three-dimensional flows (Batchelor Reference Batchelor1967), including flows generated by multiply connected surfaces, e.g. tori. This establishes that the viscous torque (and the viscous force, see § A.1) vanishes for those flows, i.e.
 \begin{equation} \boldsymbol{\varLambda}_v^{3D} = \boldsymbol{0}, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v^{3D} = \boldsymbol{0}, \end{equation}
where the superscript  $3D$ denotes three-dimensional flows. In contrast, these constraints on
$3D$ denotes three-dimensional flows. In contrast, these constraints on  $n$ are violated for two-dimensional flows establishing that the viscous torque can be non-zero, i.e.
$n$ are violated for two-dimensional flows establishing that the viscous torque can be non-zero, i.e.
 \begin{equation} \boldsymbol{\varLambda}_v^{2\textit{D}} ={-} 2 \mu \int_{S_\infty} \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e}) \,{\rm d} S, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v^{2\textit{D}} ={-} 2 \mu \int_{S_\infty} \boldsymbol{r} \times (\boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{e}) \,{\rm d} S, \end{equation}
with the superscript  $2D$ denoting two-dimensional flows. From the general multipole expansion for the velocity field in potential flow, it follows that (Batchelor Reference Batchelor1967)
$2D$ denoting two-dimensional flows. From the general multipole expansion for the velocity field in potential flow, it follows that (Batchelor Reference Batchelor1967)
 \begin{equation} \boldsymbol{u} \sim \frac{\varGamma}{2 {\rm \pi}r} \boldsymbol{\hat{\phi}},\quad r \to \infty, \end{equation}
\begin{equation} \boldsymbol{u} \sim \frac{\varGamma}{2 {\rm \pi}r} \boldsymbol{\hat{\phi}},\quad r \to \infty, \end{equation}
in cylindrical polar coordinates,  $(r, \phi, z)$, where
$(r, \phi, z)$, where  $\boldsymbol {\hat {\phi }}$ is the basis vector in the
$\boldsymbol {\hat {\phi }}$ is the basis vector in the  $\phi$-direction and the circulation is
$\phi$-direction and the circulation is  $\varGamma$. Equations (A6) and (A7) then give the required viscous torque,
$\varGamma$. Equations (A6) and (A7) then give the required viscous torque,
 \begin{equation} \boldsymbol{\varLambda}_v^{2D} ={-} 2 \mu \varGamma L \ \hat{\boldsymbol{x}}_3, \end{equation}
\begin{equation} \boldsymbol{\varLambda}_v^{2D} ={-} 2 \mu \varGamma L \ \hat{\boldsymbol{x}}_3, \end{equation}
where  $L$ is the nominal length perpendicular to the
$L$ is the nominal length perpendicular to the  $(x_1,x_2)$-plane flow. That is, the viscous torque is non-zero and depends on viscosity only when the circulation,
$(x_1,x_2)$-plane flow. That is, the viscous torque is non-zero and depends on viscosity only when the circulation,  $\varGamma$, is also non-zero. This matches the result reported by Joseph et al. (Reference Joseph, Liao and Hu1993) when the surface,
$\varGamma$, is also non-zero. This matches the result reported by Joseph et al. (Reference Joseph, Liao and Hu1993) when the surface,  $S$, is chosen to be that of a rigid body, i.e. the no-penetration condition is imposed on
$S$, is chosen to be that of a rigid body, i.e. the no-penetration condition is imposed on  $S$.
$S$.
This analysis proves that dimensionality controls when the viscous torque vanishes.
A.3. Summary
The formulae derived in §§ A.1 and A.2 complete the analysis first reported by Joseph et al. (Reference Joseph, Liao and Hu1993) which was restricted to (i) the force and torque in unbounded two-dimensional flows, and (ii) the drag force in an unbounded three-dimensional flow generated by a purely translating body. They also generalise the results of Joseph et al. (Reference Joseph, Liao and Hu1993) which considered the force and torque acting on the surface of a rigid body only. These results may be attainable using alternative impulse formulations (Eldredge Reference Eldredge2019).








