1. Introduction
The biped robots consist of two legs and can be capable of walking on various terrains and performing the tasks done by a human being. The primary significance of the biped robot’s locomotion can be influenced by the gait cycle and the environment’s structure. The style of a succession of legs’ collaboration and body movements for locomotion of the robot on specific terrains is called “gait,” and it can be classified as periodic and non-periodic gaits. In periodic gaits, the same sequence of steps can be generated from beginning to end. In non-periodic gaits, the gait cycle can vary depending on the environmental conditions. Further, the walking cycle of the biped robot can also be classified into two different phases, namely a single support phase (SSP) and an instantaneous double support phase (DSP) shown in Fig. 1. In SSP, the robot only takes a forward stride and covers some distance, whereas the DSP is an instantaneous phase whose purpose is to exchange the leg’s support. Further, the gait generation of the biped robot can be performed in two ways: active walking and passive walking. In active walking, the actuators are attached with models on their joints, while the actuators are absent in passive walking. In general, there are two ways of bipedal walking systems one is static walking and another one dynamic walking system. In static walking, the balancing of the biped robot is determined based on the center of mass (COM). In the case of dynamic walking, the walking cycle is faster than static walking, and the balancing of the biped robot is measured based on the zero moment point (ZMP). The ZMP is a point about which the summation of all the moments generated by the active forces will be made equal to zero. The extent of the balance of a biped robot is measured with the help of a dynamic balanced margin (DBM).
Table I. Equations required for calculating the ZMP and DBM in X and Y directions. Refs. [Reference Erbatur, Okazaki, Obiya, Takahashi and Kawamura18]–[Reference Dekker22].

where m = mass of the links, i = 1, 2,
 $ 3\cdots $
, links,
$ 3\cdots $
, links,
 $I_{i}\dot{\omega }_{i}$
= torque, L = length of the foot along X-direction, W = width of the foot along Y-direction.
$I_{i}\dot{\omega }_{i}$
= torque, L = length of the foot along X-direction, W = width of the foot along Y-direction.

Fig. 1. Gait phases (i) SSP ends, DSP begins, (ii) DSP, (iii) DSP ends, SSP begins (iv) SSP [Reference Hobon, De-León-Gómez, Abba, Aoustin and Chevallereau1].
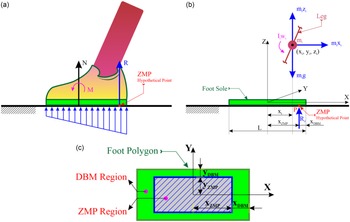
Up to now, many researchers have developed gait generation of the biped robot on various terrain conditions like flat surface, ascending and descending the staircase, ascending and descending the sloping surface, rough terrain, uneven terrain, avoiding obstacles, stepping over the obstacles, crossing the ditches & self-navigation in an unknown environment, etc. But, dynamically balanced gait generation of the biped on various terrains is a challenging task. Vukobratovic and Stepanenko [Reference Vukobratović2, Reference Vukobratović and Stepanenko3] introduced the concept of ZMP by considering the upper body of the biped walking model as an inverted pendulum, which helped to determine the DBM [Reference Seo and Yoon4]. Moreover, in SSP, the ZMP falls at the inside support polygon of the attached foot, and in DSP, the ZMP also falls between the polygon obtained by two-foot supports. Alongside, the DBM was introduced to estimate the extent of stability in the dynamically balanced system. If the dynamic balance margin of the robot is more, then the robot becomes more stable while walking on various terrains. Figure 2 shows the schematic representation of the ZMP and DBM, and Table I shows the equations required for evaluating ZMP and DBM in X and Y directions. When the ZMP falls outside the foot support polygon, it can be understood that the biped robot becomes unstable, and the dynamic balance margin encompasses the fictitious ZMP [Reference Vukobratović and Borovac5]. Therefore, the approaches used for the biped robot’s stability are not efficient and robust [Reference Hobbelen and Wisse6, Reference Huang and Ono7]. Many researchers used various techniques for compensating the ZMP, which are preview control [Reference Kajita8], AI-based gait [Reference Vundavilli, Pratihar, Pratihar and Jain, eds.)9, Reference Zheng10], and model predictive control [Reference Yin and Hosoe11]–[Reference Wieber13]. Other than ZMP, few researchers have used the periodicity-based gait, theory of capture points [Reference Pratt and Tedrake14]–[Reference Pratt, Carff, Drakunov and Goswami16], and the foot placement estimator [Reference Wight, Kubica and Wang17] for analyzing the dynamic stability.

Fig. 2. (a) Schematic diagram showing the ZMP acting on the foot support, (b) free body diagram showing all forces responsible for creating moment about ZMP, (c) schematic diagram showing the range of possible ZMP region and DBM region under the foot polygon.
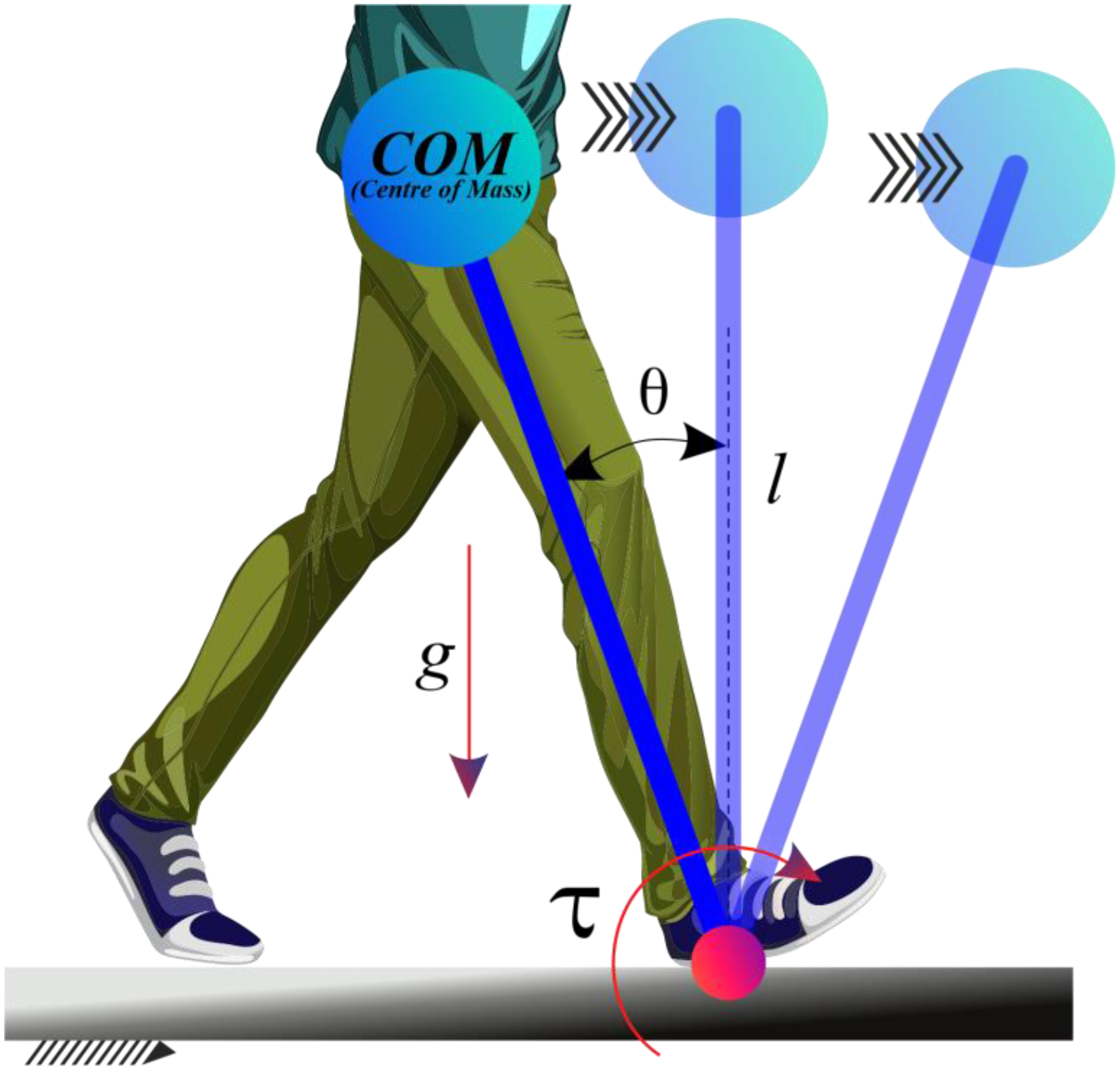
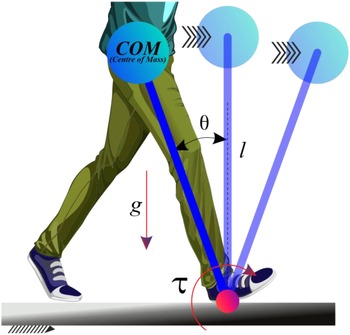
Fig. 3. Biped locomotion compared to inverted pendulum model (IPM).
In addition to, Goswami [Reference Goswami23] introduced the idea of the foot rotation indicator (FRI) point, where the net ground response must guarantee no revolution or stationary foot of the biped robot in the SSP. The FRI point should lie under the curved structure of the foot support polygon. At the same time, FRI point may go away from the foot support region, which stipulates the orientation of the upcoming rotation and the amount of rotational moment acting on the foot. The FRI position outside the impression indicates the bearing of the approaching revolution, and the point represents the extent of the unequal moment on foot. Moreover, to simplify the locomotion of the biped robot, several researchers developed the analogy of human movement with compass gait and the inverted pendulum model in terms of static and periodic stability [Reference Cannon24]– [Reference Miyazaki and Arimoto29] as shown in Fig. 3. The periodicity-based gait can be generated by using: CPG, a self-excited mechanism [Reference Huang and Ono7, Reference Sangwan, Taneja and Mukherjee30], exploiting natural dynamics [Reference van Zutven, Kostić and Nijmeijer31], and optimization techniques [Reference Chevallereau and Aoustin32]–[Reference Chevallereau, Formal’sky and Djoudi34]. The ankle springs affect the walking motion, whereas the anterior spring for other positions ensures the sagittal plane’s stability [Reference Wang, Tobajas, Liu, Geng, Qian and Ren35]. The characteristics of the best mechanism show higher stiffness of the ankle joint in the sagittal plane rather than in the frontal plane. Goswami et al. [Reference Goswami, Thuilot and Espiau36] discussed the stable passive gaits of a nonlinear kinematic biped model analogous to the double inverted pendulum and enabled it to walk similar to compass gait. The compass gait is used to formulate the mathematical model of human locomotion easily. The passive gaits compensate only the torques due to gravitation, and the continuous motion is compensated by the conversion of potential energy [Reference Goswami, Espiau and Keramane37, Reference Spong and Bullo38]. If there is a continuous change in these parameters, the gait gradually changes to chaos [Reference Goswami, Thuilot and Espiau39]. To overcome the chaotic motion at the end and enhance the stable walking speed, a chaos control technique was reported in ref. [Reference Suzuki and Furuta40] based on the OGY method and the Poincare section to observe a linear map to ensure the stance leg angle remains vertical to the slope, enabling the robot to walk on a more sloped surface and inducing the legs’ levitation. Moreover, in ref. [Reference Zheng and Wang41], the authors employed the linear complementarity problem technique for obtaining smooth leg transitions without slipping and bouncing and orderly walking of compass biped curtailing chaos.
The authors have reviewed the vast compilation of research work and proposed a taxonomy to classify the biped robot’s design issues and gait generation. Finally, the authors identified four objectives which will lead this study to the desired conclusion.
The aim of this study is to:
-
• Identify the standards and best practices for designing the biped robot and generating its gait on different terrains.
-
• Clarify and systematically classify the different factors of gait generation and design issues of the biped robot.
-
• Examine the performance and robustness of the developed approaches of biped gait generation and their closeness to human walking.
-
• Investigate the need for further research on the gait generation of the biped robot.
This paper has been categorized into six sections. Section 1 discusses the fundamentals related to gait generation and the dynamic balancing of the biped robot. The authors outlined the proposed taxonomy of biped robot gait generation and design issues, which included four basic gait generation techniques, the design of biped robots and its difficulties, and various controller types used globally for biped robot gait generation. Additionally, various developed approaches for the biped robot’s gait generation on various terrain conditions have been described in Section 3. In Section 4, there is a comprehensive explanation of the significance of various gait generation techniques, their benefits and limitations, control and optimization algorithms. Finally, Section 5 discussed the review’s conclusions, and Section 6 presented its future scope.
2. Taxonomy for gait generation and design issues of the biped robot
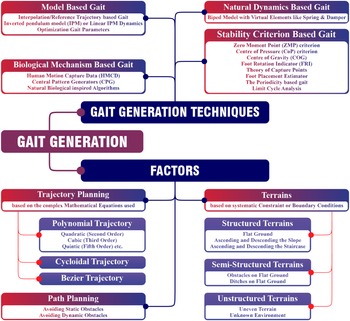
This section covers the proposed taxonomy for various aspects of gait generation and the design of biped robots. The authors have attempted to simplify and classify the concerning factors and gait generation techniques (as shown in Fig. 4) for the gait generation problem and design issues of the biped robot (as shown in Fig. 5) based on various perspectives through the proposed systematic taxonomy. This taxonomy can help the researchers to identify the problem and then wisely select the appropriate strategy for research.
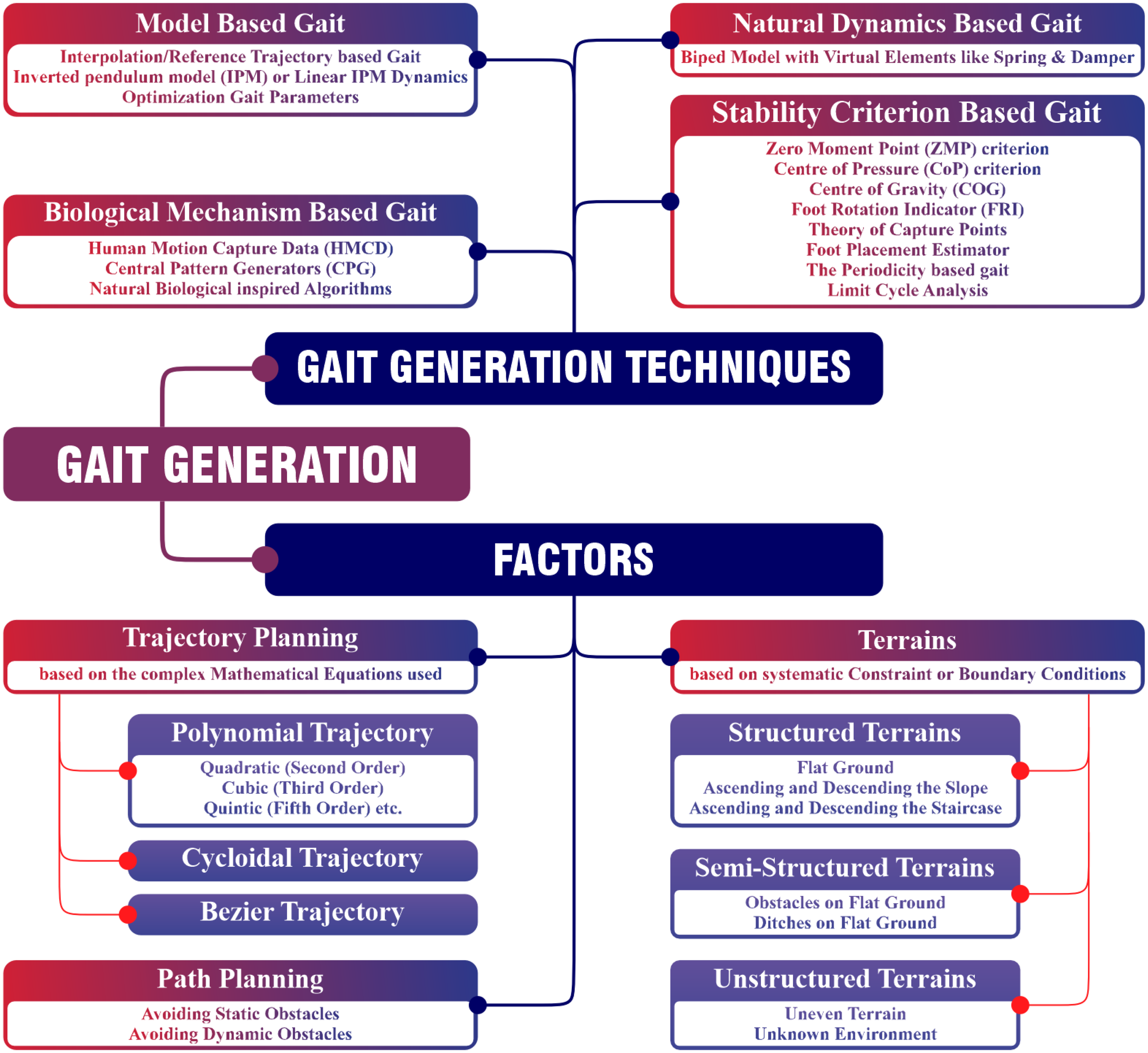
Fig. 4. Taxonomy showing gait generation dependency on independent factors and gait generation techniques.
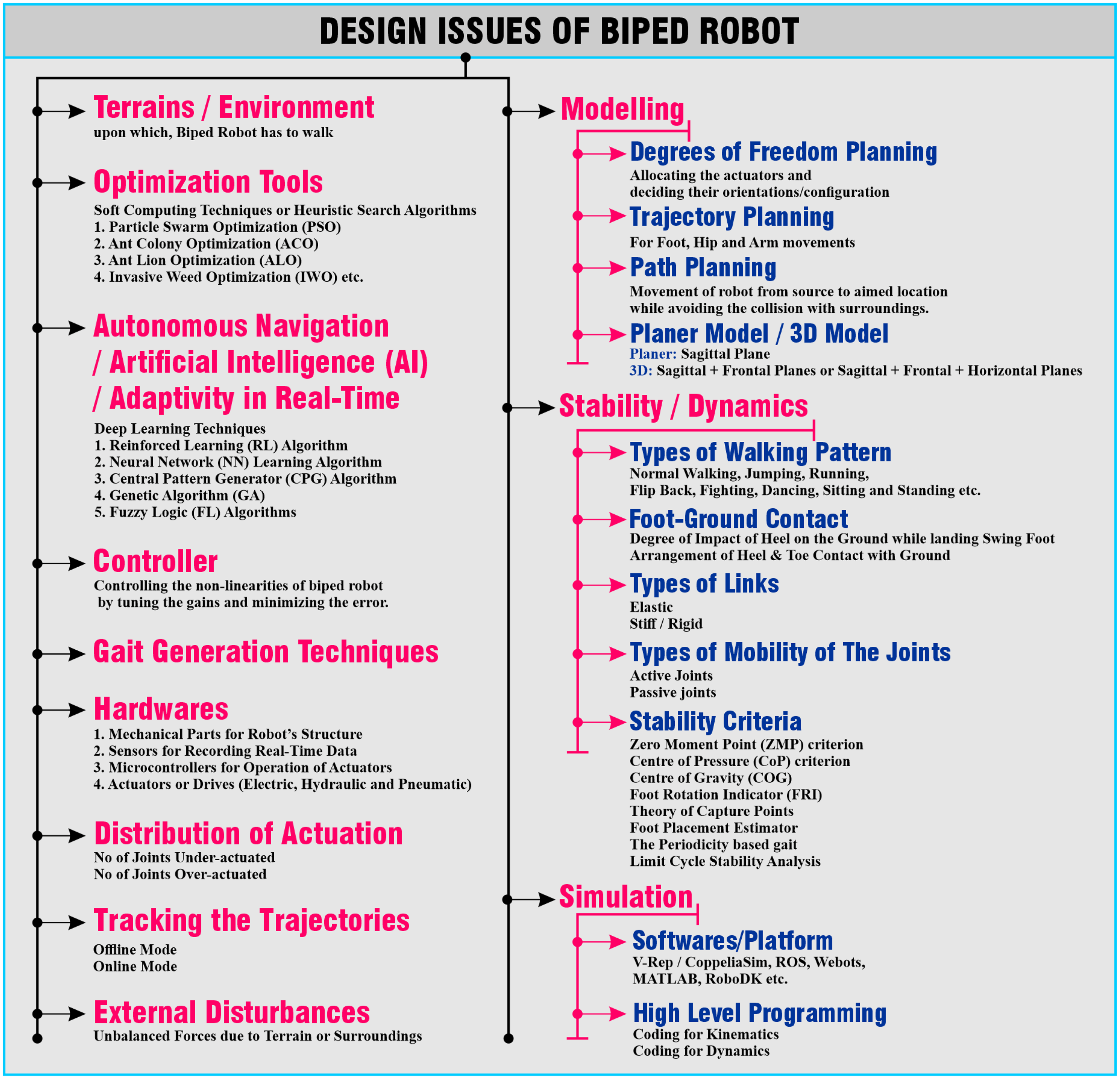
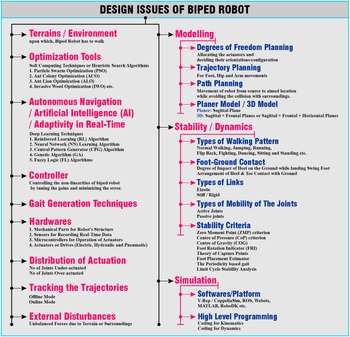
Fig. 5. Taxonomy for various design issues of the biped robot.
2.1. Types of gait generation techniques
Fundamentally, there are four gait generation techniques; model-based, natural dynamics-based, bionic kinematics or biological mechanism-based, and stability criterion-based technique (see Fig. 4). The model-based gait generation technique mainly consists of interpolation-based gaits which means generating reference trajectories by polynomial satisfaction of the constraints and tracking them by using the control system [Reference Vanderborght, Van Ham, Verrelst, Van Damme and Lefeber42]; linear inverted pendulum model (LIPM) dynamics-based modeling and optimization-based gaits that include the optimization of energy consumption, robot construction, control system, and adaptation. The drawback of this technique is the requirement of all the information on the dynamic parameters of the respective biped model.
It is to be noticed that the biological mechanism-based gait generation is inspired by animal and human motion capture data (HMCD) which can generate different stable rhythmic patterns along with the capabilities to change the pattern and its speed quickly [Reference Matsuoka43]. Further, the central pattern generators (CPG) and neural networks (NN) are inside the spinal cord, capable of generating rhythmic locomotion and lacking any sensory signals. The Matsuoka neural oscillator [Reference Pandy, Anderson and Hull44] and the Van der Pol oscillator [Reference Zielińska45, Reference Or and Takanishi46], two popular models, are used for modeling the CPGs. It has been observed that the other approaches which are biologically inspired fall under artificial intelligence (AI)-based gait, which encompasses genetic algorithms (GA), fuzzy logic (FL), and NN.
Moreover, natural dynamics-based gait is performed based on intuitive control, natural dynamics of the biped, physics of the system, and virtual elements like dampers and springs that is why this technique does not need any predefined reference trajectories [Reference Al-Shuka, Allmendinger, Corves and Zhu47]. And also, the gait can be performed based on stability criterion-based gait generation techniques, including ZMP, DBM, CoP, COG, CoM, FRI, theory of capture points, foot placement estimator, periodicity-based gaits, and limit cycle analysis.
Apart from these gait generation techniques, the researchers should also identify some factors (see Fig. 4) while planning the gait generation of the biped robot, such as a suitable trajectory equation based on polynomial, cycloidal, and Bezier curves, avoiding static and dynamic obstacles for path planning, and types of terrain for estimation of the boundary conditions for swing foot, hip, and wrist trajectories.
2.2. Biped robot design and its challenges
The above discussion of fundamental gait generation techniques might help the researchers to identify standards and best practices for developing the biped robot and generating its gait on different terrains. This partially fulfills Objectives I and II of this research work. The fundamentals of biped locomotion have been explained briefly in the introduction part of this article. At the same time, the design issues of the biped robot have been presented pictorially in Fig. 5, which needs to keep in mind before planning and designing the biped robot. These factors also affect the ability of a robot to walk over uneven terrain. The fundamentals of modeling the biped robot, such as deciding the number of degrees of freedom of the robot, include the allocation of the actuators and their orientations. Further, the type of trajectory must be planned for each part of the robot’s mechanism, such as the swing foot, wrist end, and hip, to enable the robot to move from the source to the aimed position, that is, path planning. The analytical modeling could be of the planner type, which includes trajectory planning only for the sagittal plane, whereas trajectory planning for both the sagittal and frontal planes or the sagittal, frontal, and horizontal planes, that is, 3D modeling must be done to enable the robot to walk in a real environment. In addition to, researchers discussed various types of walking patterns, type of foot and ground contact, including probable forces developed due to the impact of the heel on the ground, and arrangement of heel and toe contact with the ground when planning the dynamics for improved stability robustness. Other than these, elastic and stiff links of robot may benefit with some flexibility to absorb impact and cause instability because of the uncertain motions generated by the elasticity factor. However, the mobility of the links depends on active or passive joints. Moreover, various stability criteria as per their skills, such as ZMP, CoP, COG, FRI, can be possible to adopt. Therefore, the mathematical model of the biped robot consists of kinematics and dynamics by using any high-level programming language and also build their planned model with the help of software, such as CoppeliaSim, ROS, MATLAB, to do simulation and verify the feasibility of their planned model. Additionally, the researchers must concentrate on the characteristics of environments or terrains, optimization algorithms, autonomous navigation through biologically inspired learning algorithms for suitable decision-making and adaptivity, designing the controller as per the nonlinearity present in the robot’s mechanism, suitable gait generation techniques, the number of underactuated and overactuated joints, planning the robustness against the probable unbalanced external forces, and both online and offline modes of tracking the deviation of the trajectories from the planned mathematical model. In addition to planning includes the hardware of the robot consists of structure of the robot, sensors for recording real-time data, and microcontrollers for operating the actuators, which could be electric, hydraulic, or pneumatic drives. Over and above, some challenges observed while designing the biped robots are as follows:
-
• The biped robot joints are underactuated during SSP and overactuated during DSP [Reference Chevallereau, Bessonnet, Abba and Aoustin48]. Consequently, the dynamics and control laws are also changed during this phase transition. In addition to the above problem, the biped robot acts as an open chain mechanism in SSP and a closed chain mechanism in DSP, which consequently changes the dynamics equations to be used.
Remark: Over-actuation of the biped mechanism is controlled by kinematic Jacobian [Reference Vanderborght, Van Ham, Verrelst, Van Damme and Lefeber42, Reference Shih and Gruver49] and minimization of the joint torques by algebraic optimization [Reference Sano and Furusho50]–[Reference Zhu53]. However, the continuous dynamic response can still not be guaranteed [Reference Al-Shuka, Allmendinger, Corves and Zhu47]. Similarly, the problems that occurred during the SSP phase are encountered by using the four control techniques: port-Hamiltonian method [Reference Duindam and Stramigioli54, Reference Duindam and Stramigioli55], differentially flatness-based approach [Reference Sangwan and Agrawal56], hybrid zero dynamics (HZD) [Reference Westervelt, Grizzle and Koditschek57], and time scaling method [Reference Zhu53, Reference Chevallereau58].
-
• A humanoid robot can be made up of more than 30-DOF, which makes its stability and control more complex [Reference Zhu53, Reference Raibert, Tzafestas and Tzafestas59, Reference Park, Kim and Oh60].
-
• When the biped robot is walking in various unknown environments in real time, it needs to develop robust algorithms for possible external disturbances and noises.
Remark: Therefore, online real-time adaptive strategies could be the possible solution.
-
• Unexpected shocks and instability of the robot are happened due to stiff joints [Reference Vanderborght, Van Ham, Verrelst, Van Damme and Lefeber42]. Many researchers have used elastic joints to overcome the problem, which can be preferred and consequently increase the system’s DOF due to flexible joints.
Remark: Despite the complexity of making the biped mechanism closer to imitating human walking, compliant legs are employed [Reference Al-Shuka, Allmendinger, Corves and Zhu47].
-
• The foot-ground contact needs to be designed appropriately to avoid impulsive forces.
To overcome these challenges, the author suggests to use a suitable controller other than the right selection of gait generation methodology.
2.3. Controllers used for generating the smooth gait
Many researchers have developed various control algorithms to control the motions and dynamic balancing of the biped robots for smoothly coordinated motions among the different mounted motors in every joint. The authors have discussed popular controlling techniques such as PID, CTC, NN, CMAC-NN, FLC, MPC & impedance control in this section.
2.3.1. PID controller
The proportional integral derivative (PID) controller is most famous for industrial applications. The PID controller consists of proportional, integral, and derivative gains containing errors between target and achieved values. The PID controllers have been used widely for many years in the robotic field due to their simplicity and ease of controlling the controller’s proportional, integral, and derivative gains. This PID controller can be simplified as PI (Proportional Integral), PD (Proportional Differential), and ID (Integral Differential) controllers for minimizing the nonlinearities in the system. The tracking system based on PD (Proportional Derivative) controllers allows adaptivity to the system as per the parameter variation and external forces [Reference Vukobratovic and Juricic61]. Above 80% uncertainty level, the PID controller fails to provide a stable gait generation of walking on flat terrain and staircase for single support and biped-in-air phases [Reference Tzafestas, Raibert and Tzafestas62]. In ref. [Reference Peca, Sojka and Hanzálek63], the authors discussed the cascaded control with all the versions of P, PID-PI, SISO, MIMIO MIMO-SISO cascaded controllers in detail. The constant gain of PID controller consequences to very high speed then slowly reduced while adaptive gain of PID controller consequently smooth operation of a biped robot [Reference Mehmeti64]. The tracking error convergence rate is controlled by the PD controller for the continuous task of the swing leg and subdue the nonlinear impacts by HZD assumptions for the discrete assignment of foot impact on the ground [Reference Kolathaya65]. Several well-known optimization techniques have been described in Section 4, which are used to optimize the gains of the PID controller. The significance of these techniques can be understood by looking at Fig. 19.
2.3.2. Computed torque controller (CTC)
Other than this, the CTC is an efficient way to generate dynamically stable gaits that curbs the system’s nonlinearities [Reference Song, Yi, Zhao and Li66]. It can stabilize but requires an exact dynamic model of the robot mechanism. That factor puts limits on its applications. It can be described as a position-oriented control technique. It is also called an inverse dynamics controller, it is one of the most widely used controllers. It was first introduced by a NASA scientist B. Markiewicz [Reference Markiewicz67] in 1973. It is based on the principle of feedback linearization, a technique for simplifying a nonlinear model into a linear one. All nonlinearities and cross-coupling terms are calculated and eliminated in this method [Reference Middletone and Goodwin68]. Its ability to transform a coupled, nonlinear mechanical system into a linear, decoupled, and stable system is one of its appealing qualities. As a result, the researchers are able to control nonlinear systems using linear controllers like PD and PID controllers. Accurate dynamical models of robotic manipulators are necessary for the CTC scheme [Reference Spong and Vidyasagar69] which puts limitation on its usage. Song et al. [Reference Song, Yi, Zhao and Li66] made an effort to address this issue and proposed a method for trajectory tracking issues of robotic manipulators with structured uncertainty and/or unstructured uncertainty by integrating CTC and Fuzzy Control. Since the parameters of the majority of physical systems are either unknown or time-variant in reality, a computed torque-like controller is used to correct the dynamic equation of the robot manipulator [Reference Piltan, Mirzaei, Shahriari, Nazari and Emamzadeh70]–[Reference Siciliano, Khatib and Kröger72].
2.3.3. NN controller
The NN technique ensures closed-loop execution for controlling the bounded errors. The NN have offline and online real-time learning characteristics for easy implementation [Reference Lewis, Jagannathan and Yeşildirek73]. The NN-based controller has been integrated with the cerebellar model articulation controller (CMAC) in most of the approaches, which is an integrative memory-type NN that was initially introduced by Albus [Reference Albus74]. Since then, it has been used in robotic applications for reinforcement learning architectures. It is a kind of NN which employs associative memory. It simplifies the large size of NN and its inherited problems [Reference Lin and Chen75, Reference Guan, Hong, Kang, Zeng, Sun and Lin76]. The CMAC executes better than the usual NN in terms of learning speed and is simple in computation and easy to implement. The NN involves entirely connected neurons, and all weights need to be updated in each learning cycle, which makes the NN slow. In contrast, CMAC is based on associative memory networking, but NN is more universal than CMAC [Reference Lin and Chen75].
2.3.4. Fuzzy logic controller (FLC)
The FLC system is a control scheme that investigates the input parameters. It considers them as logical data from 0 to 1, representing false and actual values, respectively. Still, the FL does not represent exact true or false but partially accurate values since it varies from 0 to 1. It was first introduced by Lotfi A. Zadeh [Reference Zadeh77]. The FLC is heuristic in nature, consisting of a knowledge base and human thinking for reducing nonlinearities [Reference Ahmadian78]. Heuristic characteristics cannot be implemented with traditional techniques. The FLC does not require accurate mathematical modeling and perfectly designed inputs to reduce the nonlinearities better than most controllers.
2.3.5. Impedance controller
The impedance controller is a dynamic control approach based on controlling the force and positions of the links. Controlling the impedance of any mechanism is controlling the force offered by the surroundings against the motions. It is being used in robotics, where the force and position of every link are essential in maintaining the dynamic stability and robustness to perform any gait. It was first introduced by Hogan [Reference Hogan79]–[Reference Hogan and Buerger81] in 1984. By incorporating a feedback control algorithm for imposing a desired cartesian impedance on the end effector of a nonlinear manipulator. The proposed method for controlling the dynamic behavior of a manipulator with its surroundings. With the help of this algorithm, it is no longer necessary to solve the inverse kinematics problem to control the robot’s motion. Further, its unique characteristics allow the researcher to superimpose different controller actions for performing diversely targeted tasks. In addition to, the structure’s ability while resist motion under any harmonic force is known as its mechanical impedance which is ratio of applied force (i.e., potential) to resulting motion, that is, (flow) [Reference Gatti82, Reference Sabanovic and Ohnishi83]. The magnitude of force required to achieve a given velocity decreases as the swing’s admittance decreases. The main goal of impedance controller is to control both the robot’s motion and its contact forces.
2.3.6. Model predictive control
This technique is a broad control strategy that satisfies the system’s constraints and gives optimum responses. In this technique, the reference trajectories are provided, based on which it predicts the future progression of the model. It itself is a broad research topic, and it has often been used in robotics. Lee and Markus discussed the significance of model predictive control in ref. [Reference Lee and Markus84]. Later, Shell Oil engineers developed the model predictive control technique in the 1970s and applied in 1973 [Reference García, Prett and Morari85, Reference Magni and Scattolini86]. Despite the significant computational load, the MPC outperforms structured PID controllers in terms of changes in system parameters (robust control), and very easily it can be applied to complicated multivariable processes [Reference Richalet87, Reference Abu-Ayyad and Dubay88]. On the basis of immediate state evaluations and anticipated process responses, it can calculate the best possible control actions [Reference Ren89]. Due to these characteristics, it is suitable for sophisticated multivariate process control systems. The architecture of MPC depends on an integrated linear or nonlinear model for capturing the dynamic behavior of the process and predicting its response over a finite horizon window in order to assess the best control trajectory by resolving a dynamic optimization problem while taking input and state constraints into account at each sampling time.
3. Gait generation on various terrains
Balancing the two-legged robot is more complicated than the wheeled robot. Moreover, the locomotion of the legged robot has more universal appeal than wheeled locomotion due to its complex and remote applications based on different terrains where wheeled mobility is impossible. In the current research work, the authors have reviewed many approaches while generating the gait on different terrains such as flat, slope & staircase.
3.1. Gait generation on the flat terrain
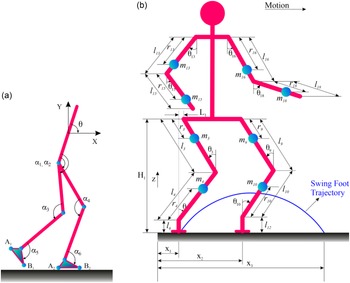
While performing the gait of the biped robot on a flat surface, several issues need to be fulfilled to complete one walking cycle. The most crucial aspects of walking are balancing, controlling, trajectory synthesis, and foot-ground interaction. Figure 6(a) and (b) show the gait generation of the biped robot on a flat surface with interpolation of cubic polynomial trajectory for the swing leg [Reference Mandava and Vundavilli90]. Various methodologies for biped gait generation are being discussed here based on four fundamental gait generation techniques adopted by researchers.
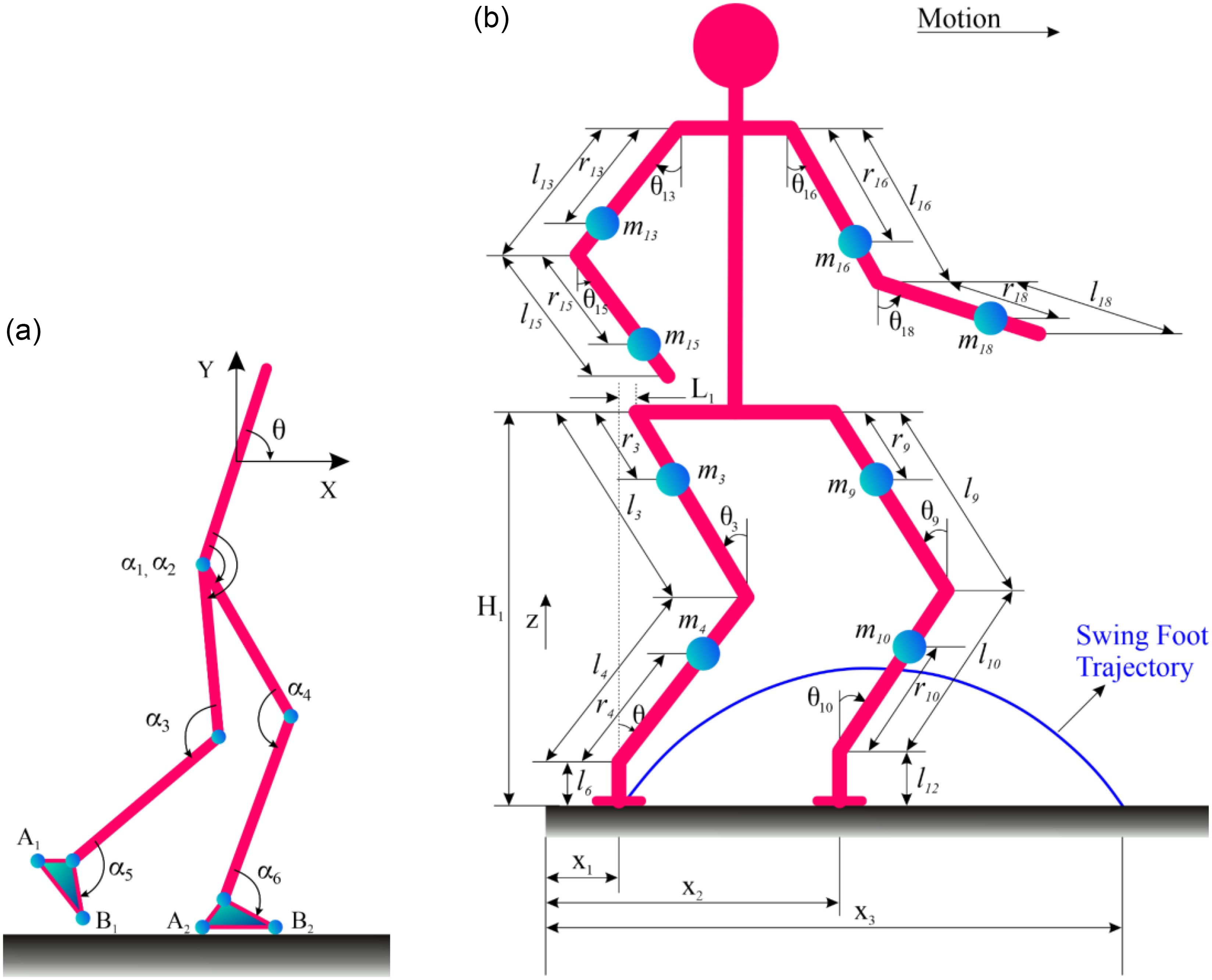
Fig. 6. Schematic diagram showing mass, length, and angles of each links (a) 9-DOF biped robot walking on the flat terrain [Reference Hurmuzlu, Génot and Brogliato159], (b) biped robot walking on the flat terrain [Reference Mandava and Vundavilli90].
Most of the researchers adopted the model-based gait technique for walking on flat terrain, which is the simplest case compared to any other terrain. The dynamics laws for the biped robot were determined by using the fundamentals of LIPM [Reference Vukobratović and Stepanenko3, Reference Xie, Zhao, Sun, Yang and Li26, Reference Golliday91–Reference Khan, Li and Zhou123], virtual height inverted pendulum mode [Reference Ha and Choi111], Euler-Lagrange formulation [Reference Hemami and Wyman124]–[Reference Mandava and Vundavilli132], Newton-Euler approach [Reference Navaneeth, Sudheer and Joy133], and then after calculation of the dynamics, the whole-body gait can be generated by using forward and inverse kinematics [Reference Kurcmatsu, Katayama, Iwata and Kitamura99, Reference Hernández-Santos, Rodriguez-Leal, Soto and Gordillo128, Reference Mandava and Vundavilli132, Reference Shih, Li, Churng, Lee and Gruver134–Reference Ceranowicz147]. The complexity of the biped modeling can be dealt by arranging the hip, knee, and ankle joints of the biped model as underactuated [Reference D.A.Bravo and Rodas125, Reference Cambrini, Chevallereau, Moog and Stojic148, Reference Chevallereau, Aoustin and Formal’sky149] and frictionless [Reference Townsend and Seireg150, Reference Formalsky, Morecki, Bianchi and Jaworek151]. Interpolation of the joint trajectory is also adopted for gait generation. Chevallereau et al. [Reference Chevallereau, Aoustin and Formal’sky149] obtained optimal joint reference trajectories gait cycle by using fourth-order polynomial functions for joint variables while keeping ankle joint underactuated. The reduced ankle power was compensated by the motion of swinging leg and body for proper foot contact with the ground, smooth walking was obtained for the lesser complex biped model, and also dynamically stable bipedal gait over the flat terrain was obtained [Reference Yi and Zheng152]. Similarly, the authors [Reference Mandava and Vundavilli132, Reference Kumar, Lathan and Vundavilli139–Reference Mandava and Vundavilli141, Reference Mandava and Vundavilli145, Reference Sabourin and Bruneau153, Reference Mandava and Vundavilli154] assigned cubic polynomial trajectories for the swing foot, hip, and wrist joint of 18-DOF humanoid robot.
Numerous researchers have developed many control schemes to reduce the effect of nonlinearities in the biped mechanism due to complex dynamics. Therefore, nonlinear feedback control for 5-DOF biped model while moving in air and free fall motion [Reference Hemami and Zheng155]; closed-loop eigen structure assignment for prescribed gait of 5-DOF model [Reference Ceranowicz146, Reference Ceranowicz147]; two-level control scheme for generating prescribed gaits and motion to reduce large deviations [Reference Vukobratović, Hristić, Stokić and Gluhajić156]; control scheme based on a novel integration of the multiple input & multiple outputs (MIMO) framework for 10-DOF biped model [Reference Kljuno and Williams136]; control technique by selecting state variables dependent output functions such as angular orientations and velocities along with Pfaff-Darbous principle and differential geometric tools [Reference Cambrini, Chevallereau, Moog and Stojic148]; robust control technique based on series elastic actuation in “FLAME” & “TUlip” for limit cycle walking [Reference Hobbelen, de Boer and Wisse157]; local feedback at each joint of the robot [Reference Furusho and Masubuchi95] and feedback control scheme for stable cyclic gait [Reference Gubina, Hemami and McGhee28] developed to obtain the dynamic stability of the biped walking on flat terrain. Other than these, a technique based on wireless monitoring and controlling of actuators and sensors by employing the tunneling method was introduced by Nicolau et al. [Reference Nicolau, Albero, Blanes and Simó158] for robot YABIRO, which is done by employing the tunneling method for enclosing CAN messages into a TCP/IP network over WiFi. Similarly, the author in ref. [Reference Oh, Sim, Jeong and Oh143] developed an online adaptation technique based on a set of intuitions for tracking reference trajectories.
Researchers have also attempted to optimize the energy consumption for obtaining the periodic gaits [Reference Hardt, Kreutz-Delgado and Helton160] by using Hamilton-Jacobi-Bellman type equations and obtaining the gait. It has been found that the gait transition from running to regular walking by releasing extra energy while shortening the legs [Reference Hodgins161] with the help of an antagonistically driven hip joint consisting of two nonlinear springs, two AC servo motors and one free joint. Furthermore, Ji et al. [Reference Ji, Qian, Ren and Ren162] investigated the impulsive effects of the ankle push-off by accelerating the swing leg and decreasing the changes in COM speed to increase the gait speed.
When the model’s physics helps to generate the gait, it is termed natural dynamics-based gait. In the initial time of biped development, the researchers preferred the physics-based gait due to the unavailability of intelligent techniques such as passive pendular gaits in the swinging phase [Reference Sardain, Rostami and Bessonnet163]; forward and reverse walking of BIPER-1, 2, 3, 4 & 5 [Reference Miura and Shimoyama93]; virtual spring and a damper to the prevalent inverted pendulum-based biped robot [Reference Bae and Oh117]; intuitive gait strategy for 9-DOF biped model controlled by forces and posture [Reference Muscato, Spampinato and Costa164] and the virtual constraints for the able gait of 7-DOF biped model RABBIT [Reference Canudas-de-Wit165].
A few approaches related to stability criterion-based gait were also reported. In ref. [Reference Kagami166], the author developed “Humanoid H7” for mimicking human motions by tracking ZMP trajectories and generating stable gait by modifying the horizontal COG positions efficiently with the help of dispersed force sensors, motion capturing mechanisms, and force plate. Further, the author [Reference Li, Takanishi and Kato167] obtained the ZMP by using the universal force-moment sensor on WL-12RIII. In addition, Tagawa and Yamashit [Reference Li, Takanishi and Kato167] introduced the Zero Moment Joint (ZMJ) concept and showed a stable biped gait for the 8-link biped model when ZMJ was the only ankle joint.
Apart from the above-discussed approaches, few researchers have also generated the biped gait inspired by bionic or biological mechanism-based gaits, which are discussed here. Such as, Yazdani et al. [Reference Yazdani, Salarieh and Foumani168] developed a bi-layer controller consisting of high-level and low-level controllers. The high-level controller utilizes all sensory information to deal with the dynamics and produce stable rhythmic motions through conscious learning during training. The low-level controller consists of a control network in which every individual node is an oscillatory dynamic that learns and reproduces the desired paths. The critic agent in the node allocates a particular controller for any parameter based on its eligibility. The proposed controller proved robust and stable as a dynamic controller but mainly featured as a path or trajectory-based controller. Similarly, the nonlinear oscillator has also been used to observe the sensor output to obtain real-time online trajectories [Reference Héliot and Espiau169]. Apart from the above-mentioned gait generation strategies, other important approaches have been listed in Table II.
Table II. Various approaches for multi-DOF biped robot’s gait generation on a flat surface.

Gait generation techniques: a Model based gaits; b Biological mechanism-based gaits; c Natural dynamics-based gaits; d Stability criterion-based gaits.
Controllers implemented: 1 PI; 2 PD; 3 PID; 4 FLC; 5 Inverse Delta-P Unit; 6 CTC; 7 Programmable Logic Controller (PLC); 8 MPC; 9 Analogue; 10 NN.
3.2. Gait generation on ascending and descending the sloping terrain
Gait generation of the biped robot on a sloping surface is a more challenging task than the flat terrain. Figure 7 (a) and (b) show the biped robot’s gait generation in ascending and descending the sloping surface.

Fig. 7. Gait generation on a sloping surface (a) ascending the slope and (b) descending the slope [Reference Gong and Schiehlen215].
Very few researchers have reported the model-based gait generation approach for ascending and descending sloping terrain. Kuo [Reference Kuo109] developed an analogy of human gait with an inverted pendulum, provided a circular trajectory instead of a horizontal trajectory for COM, and found that a horizontal COM trajectory consumes more muscular energy.
In addition to what has been said, Pratt [Reference Pratt212] presented the natural dynamics and inherent robustness of the biped locomotion mechanism and developed the Spring Flamingo robot using a low-impedance controller which can start and stop while moving on slopes and rolling surfaces with various speeds. The derived control algorithm exhibits three stages: the primary algorithm control walking, the secondary algorithm exploits the kneecap, ankle, and passive swing leg natural dynamics, and the tertiary algorithm ensures fast walking of the swing leg. The authors added lateral balance to the three-dimensional algorithm and simulated the 3D model.
Stability criterion-based approaches have also been developed and implemented for gait generation on a slope. Massah et al. [Reference A.M., A.S., Salehinia and Najafi113] used 3D inverted pendulum-based equations and ZMP concept for developing a trajectory planner by employing the semi-ellipse EOM (equations of motion) for an NAO humanoid robot and simulated on Webots while walking on various slope terrains. Vundavilli and Pratihar [Reference Vundavilli and Pratihar127] used ZMP concept and reported more DBM for ascending the slope than descending the slope. Furthermore, Hwang et al. [Reference Hwang, Yeon and Park213] obtained momentum equations based on ZMP by treating biped robot as a particle and assuming the motion of CoM parallel to the slope and then simulated it by using ResurDyn and MATLAB commercial software. In addition to, Ito et al. [Reference Ito, Nishio, Ino, Morita, Matsushita and Sasaki214] reduced the number of actuators of biped robot without sacrificing adaptability and ability then applied the gravity compensation mechanism and feedback from CoP of the ground reaction forces.
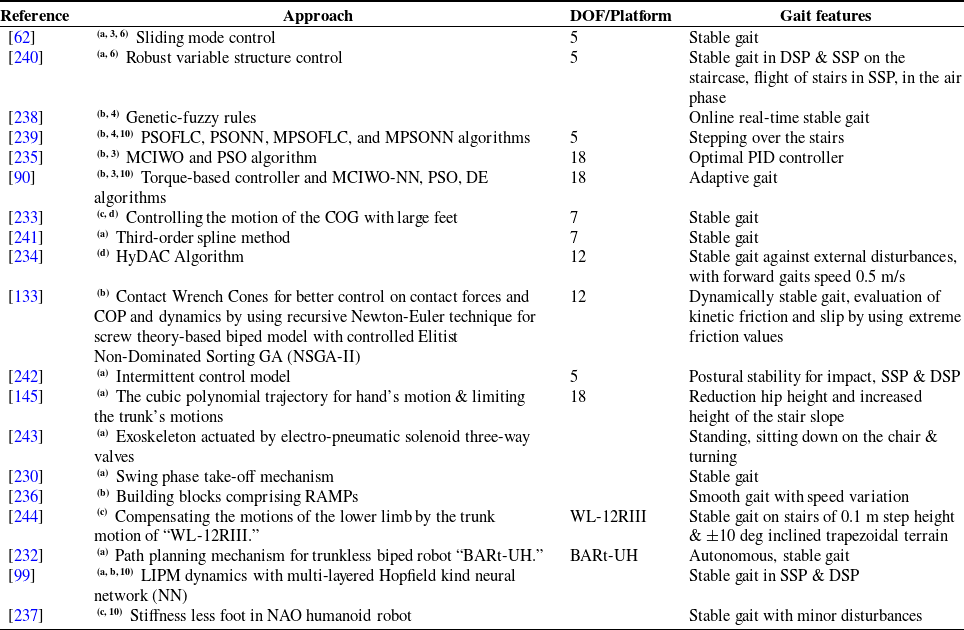
Most of the researchers have attempted the biological mechanism-based gait for ascending and descending the sloping terrain. The central pattern generator (CPG) has inspired the researchers to build learning architecture for biped robots of different configurations and enabled the biped robots for autonomous biped gait [Reference Zheng10]; smooth gait transition from flat to slope & vice versa [Reference Zheng and Shen217]; walking on a flat plane with different friction properties and little change in inclination [Reference Nakanishi, Morimoto, Endo, Cheng, Schaal and Kawato218], stable gait on unknown inclination [Reference Song and Hsieh219], and adaptivity in different environments [Reference Macedo, André and Santos220]. Further, few gait generation algorithms have been developed for generating complex gait patterns using AI techniques such as Genetic Algorithm [Reference Hasegawa, Arakawa and Fukuda221], neurons and neural pathways [Reference Maniscalco, Messina and Storniolo222], genetic-neural (GA-NN) and genetic-fuzzy (GA-FLC) [Reference Vundavilli and Pratihar223], NN integrated with modified chaotic invasive weed optimization (MCIWO), and PSO algorithm [Reference Mandava and Vundavilli224]. The AI has enabled the biped robots to walk on sloping terrains more efficiently, but if there is a change or increase in inclination angle, then some essential sensors must be attached to the biped legs. The researchers have employed the integration of position sensors (on joints) and force sensors (under foot) to identify slope gradient [Reference Zheng and Shen217]; gyroscope and accelerometer sensors to identify the upper body’s posture [Reference Song and Hsieh219]; inertial measurement unit (IMU) sensor [Reference Behera, Mandava and Vundavilli216] (gait shown in Fig. 8); and 2-axes accelerometer sensor [Reference McGrath, Baltes and Anderson225] for obtaining the smooth, balanced gait on slope terrain. To overcome the difficulty due to complex mathematical modeling, the author [Reference McGrath, Baltes and Anderson225] developed a collective balancing reflex of threshold, PID, and hybrid control with a 2-axes accelerometer sensor, which does not need any mathematical modeling. The remaining methodologies are briefly summarised in Table III in addition to the methods already mentioned.
Table III. Various approaches for multi-DOF biped robot’s gait generation for ascending and descending on the sloping terrain.
Gait generation techniques: aModel based gaits; bBiological mechanism-based gaits; cNatural dynamics-based gaits; dStability criterion-based gaits.
Controllers implemented: 3PID; 4FLC; 10NN.

Fig. 8. Dynamic stability against gravity on the sloping terrain [Reference Behera, Mandava and Vundavilli216].
Remark: Due to the enhanced complexity of the terrain, scientists have shifted their gait generation approaches from model-based gait to advanced AI-based or bionic gait generation techniques and obtained better adaptivity. Many researchers have adopted biological mechanisms and stability criterion-based methods for generating biped gait on sloping terrain.
3.3. Gait generation on ascending and descending the staircase
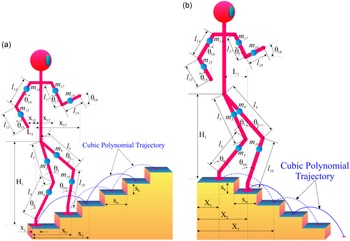
The gait generation on the staircase is very different from the flat and sloping surfaces due to the approximate relationship between the height-width of every step and the length of the robot’s leg. There are chances of collision of the robot with the staircase. Therefore, the swing phase take-off mechanism is essential in determining the gait pattern characteristics [Reference Townsend and Tsai230]. The synchronization of all robot links and defining the proper foot trajectory become vital for stabilizing the robot. Figure 9(a) and (b) show the gait generation of the biped robot for ascending and descending the staircase, respectively, by controlling the forward gaits speed and swing foot placement.
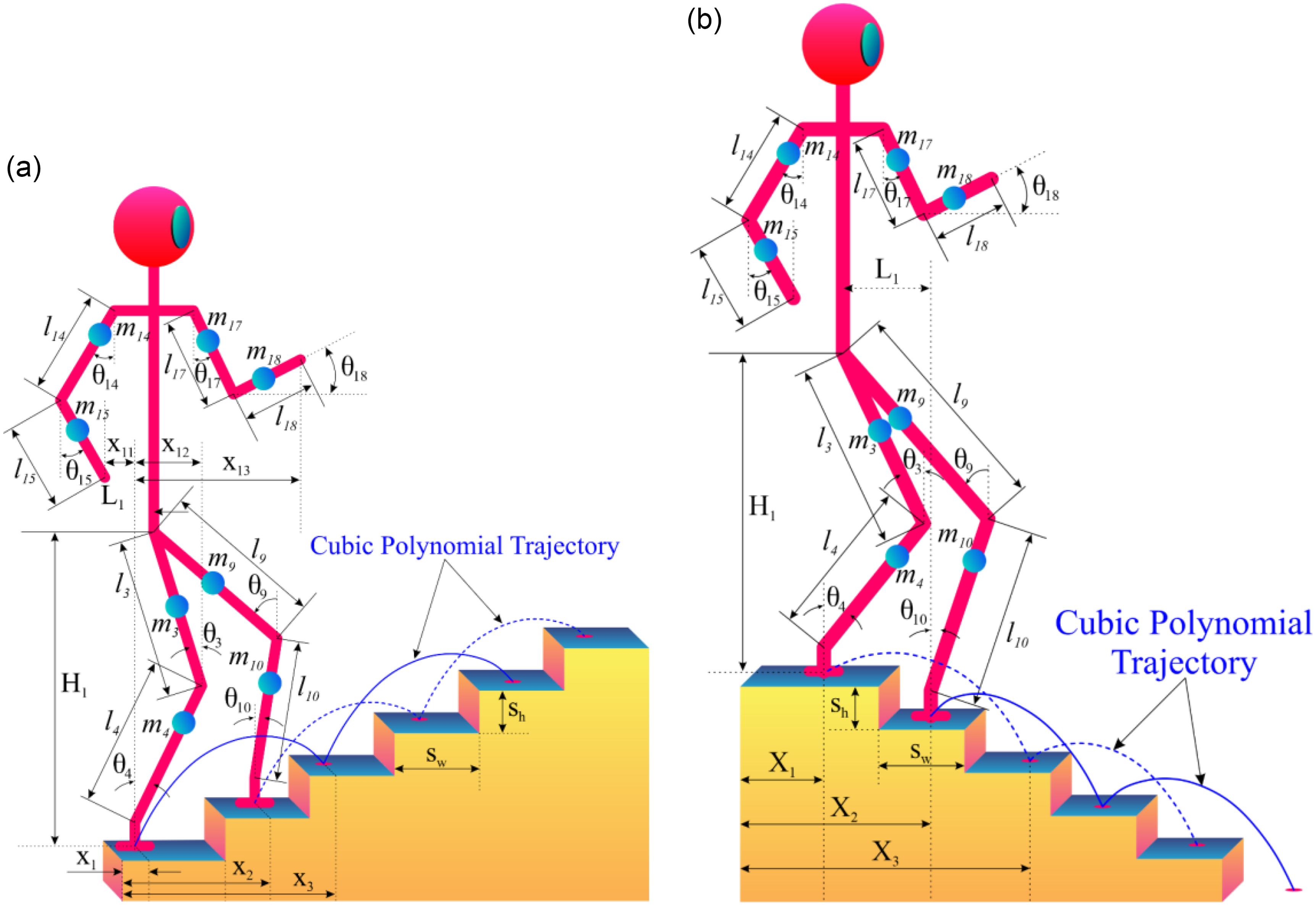
Fig. 9. Schematic diagram showing the gait generation of the biped robot (a) ascending the staircase and (b) descending the staircase [Reference Mandava and Vundavilli145].
In the early development stage of the biped robots, a 17-DOF biped robot consisting 15 active DOF and 2 passive DOF was developed by Espiau et al. [Reference Espiau231] under the French joint project BIP that achieved walking on flat terrains, inclined terrain, ascending, and descending stairs. Since then, many approaches and models have been developed and shown their improved robustness. Tzafestas et al. [Reference Raibert, Tzafestas and Tzafestas59] reported that the sliding mode control performs better than the torque-based "pure CTC" technique to overcome the high nonlinearities of gaits on the staircase. In this direction, Albert [Reference Albert232] developed a trunkless biped robot BARt-UH and designed a path planning mechanism to optimize nonlinearities.
Some researchers have obtained stability by controlling the motion of the CoG of 7-DOF biped with large feet [Reference Shih233] and supervising of the ground center of pressure (GCoP) of 12-DOF biped by using the “hybrid-state driven autonomous control (HyDAC)” algorithm [Reference Zachariah and Kurian234]. Besides that, Mousavi and Bagheri [Reference Song and Hsieh219] developed a mathematical model for interpolating third-order spline and monitoring the ZMP using MATLAB/SIMULINK. A fusion of model-based gait and bionic or AI-based gait was reported in refs. [Reference Mandava and Vundavilli235, Reference Mandava and Vundavilli145]. Later, Mandava and Vundavilli developed an optimal PID controller for an 18-DOF mini-sized humanoid robot and reported its better performance when optimized by a novel MCIWO algorithm than PSO. The developed algorithm also encompasses the deviations in slope inclination and staircase dimension. The authors reported enhanced DBM due to cubic polynomial trajectory in swing foot and reduced hip height and increment in the height of the stair slope.
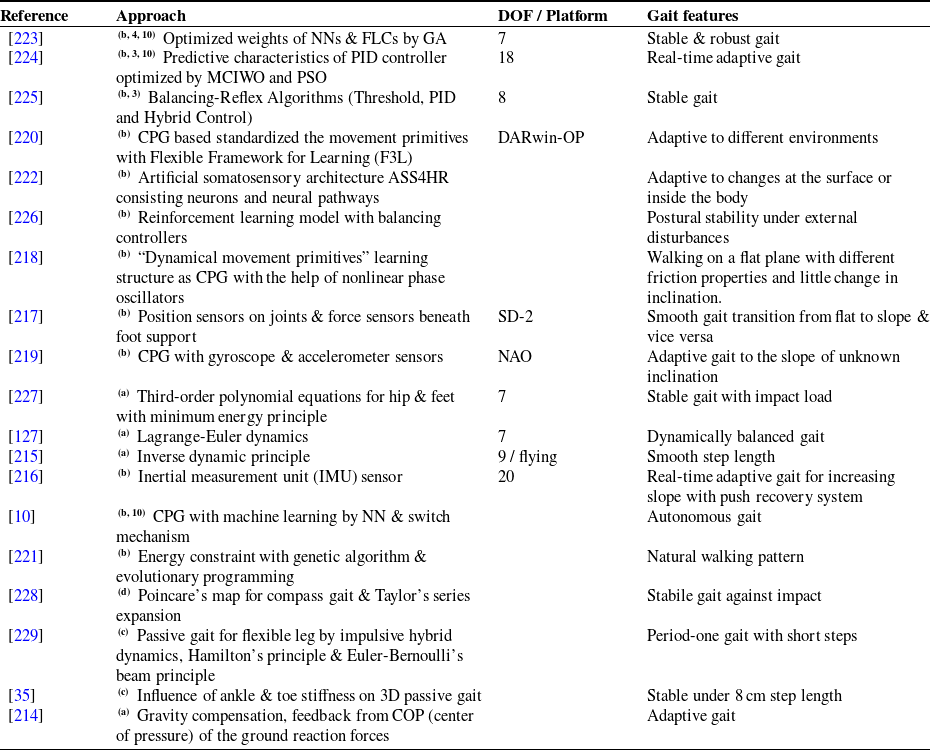
Bionic gaits consisting of AI-based approaches helped the researchers generate adaptive and autonomous gaits. Intelligence has been developed in biped models by implementing multi-layered Hopfield kind NN, which resulted in autonomous trajectory generation [Reference Kurcmatsu, Katayama, Iwata and Kitamura99]; architecture of building blocks comprising Reconfigurable Adaptive Motion Primitives (RAMPs) [Reference Rakovic, Borovac, Santos-Victor, Batinica, Nikolic and Savic236]; controller consisting of numerous neurons for energy efficient gait of NAO robot and managing small disturbances [Reference Sun and Roos237]; FLC rule base optimized by GA [Reference Jha, Singh and Pratihar238] and controller composed of NN and FLC [Reference Zhong and Chen239]. Zhong and Chen [Reference Zhong and Chen239] reported that the MPSONN (Neural Network optimized by Modified Particle Swarm Optimization) required the least training time compared to MPSOFLC, PSONN, PSOFLC, and NN. And also, the authors [Reference Mandava and Vundavilli90] demonstrated better performance of the NN when optimized by MCIWO than differential evolution (DE) and PSO. For remaining biped gait generation techniques not covered in this section, see Table IV.
Table IV. Various approaches for multi-DOF biped robot’s gait generation for ascending and descending the staircase.
Gait generation techniques: a Model based gaits; b Biological mechanism-based gaits; c Natural dynamics-based gaits; d Stability criterion-based gaits.
Controllers implemented: 3 PID; 4 FLC; 6 CTC; 10 NN.
3.4. Gait generation for avoiding, crossing, and stepping over the obstacles
The evolution of biped locomotion has the motive to develop a robust humanoid robot, efficient enough to perform all human motions. Humans inherit learnings from all sensory, intuitive knowledge, which is challenging to produce in the humanoid robot. But, applying some reinforced learning (RL) algorithms can develop intuitiveness in humanoid robots. To do so, many researchers have proposed some unique methodologies.
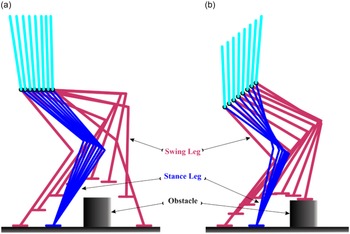
Most of the researchers have shown interest in path planning to avoid obstacles. Very few have attempted to solve the problem of identifying the obstacles, and then crossing over or stepping over the obstacles. The perception-based control system was developed for generating walking primitive data of 16-DOF biped robot for step length adaptation, altering the direction and stepping over the obstacles in ref. [Reference Denk and Schmidt245]. And also, the architecture consisting of the GA-NN and DE-NN that means NN trained by GA and DE, respectively, achieved the gait for crossing over the obstacles and positioning the foot on the obstacles as shown in Fig. 10(a) and (b) along with generating the horizontal trajectory for hip and cubic polynomial trajectories for the swing foot respectively [Reference Kumar, Lathan and Vundavilli139]. Gait while crossing the obstacles showed a more robust gait than positioning the foot on top of the obstacles.

Fig. 10. Stick diagram showing the gait generation (a) crossing the obstacle, (b) stepping over the obstacle [Reference Kumar, Lathan and Vundavilli139].
Vukobratović and Stepanenko [Reference Vukobratović and Stepanenko246] used the concept of prescribed synergy for more realistic locomotion. Then in 1989, the scientist Raibert et al. [Reference Raibert, Brown, Chepponis, Koechling and Hodgins247] from the Massachusetts Institute of Technology, developed a control system for one-legged locomotion and extended it to a planar biped machine for running, negotiating obstacles, and climbing stairs. The open-loop control was integrated with the usual running gait that generated front flips and aerials motion. Igarashi and Nogai [Reference Igarashi and Nogai248] generated adaptive walking patterns and trajectories for a lower limb biped robot with a step of 1.5 seconds and 0.3 m width against variation in width, an obstacle, ascending staircase and descending staircase also. Later, the author [Reference Kashyap and Parhi249] obtained LIPM plus flywheel model (LIPPFM) optimized by ant lion optimization (ALO), which relaxes the constraint of COM’s height; consequently, a larger stride gave a more robust gait for avoiding the obstacles, as shown in Fig. 11.

Fig. 11. Experimental & simulation result of navigation scheme [Reference Kashyap and Parhi249].
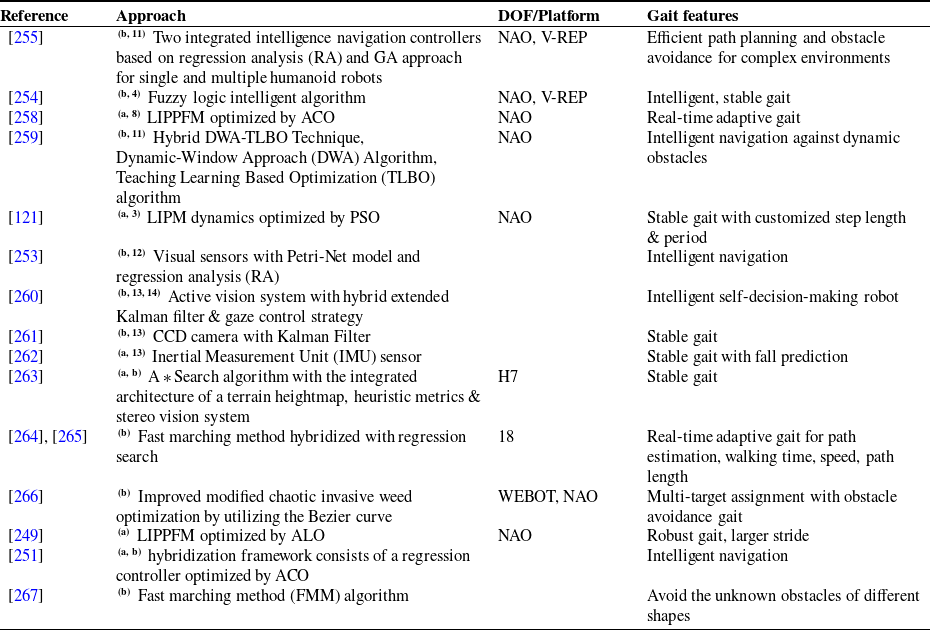
In addition to said methodologies, the self-navigation of biped robots has also been studied for a long time. Detecting the perception of the terrain is a very complex impediment for biped robot’s navigation due to the limited view angle of visual sensors [Reference Lee, Lee, Hwang and Park250]. That is why most of the navigation approaches are based on AI for the identification of the obstacles and then navigation around them for avoiding the obstacles. Such as, a novel hybridization framework consisting of a regression controller optimized with ant colony optimization (ACO) [Reference Kumar, Sahu and Parhi251]; ZMP evaluation by using visual sensors [Reference Yagi and Lumelsky252]; multi-modal sensory architecture having 6-DOF force-torque sensors at robot ankles and joint encoders for identifying the contact of the foot with a block [Reference Lee, Lee, Hwang and Park250]; RA-FLC hybrid controller integrated with the Petri-net model and a control software consists of a stereo-camera driver [Reference Kumar, Muni and Parhi253]; FL intelligent algorithm [Reference D’Apolito183, Reference Rath, Parhi, Das, Muni and Kumar254]; integrated intelligence navigation controllers based on regression analysis and genetic algorithm approach for single and multiple NAO humanoid robots [Reference Kumar, Kumar and Parhi255]; a pure vision-based algorithm for the entire humanoid navigation strategy based on the topological map or visual memory (VM) by using an RGB-D camera [Reference Delfin, Becerra and Arechavaleta256] and 3D-SLAM (Simultaneous Localization and Mapping) by evaluating the next viewpoint from a map through the camera for finding and holding the aimed object in unknown surroundings [Reference Tsuru, Escande, Tanguy, Chappellet and Harad257]. Besides the said approaches, the rest of the methodologies have been collected and tabulated concisely in Table V. Over and above the static obstacles, other strategies for dynamic obstacles have been discussed in Section 3.5.
Table V. Various approaches for multi-DOF biped robot’s gait generation for avoiding, crossing, and stepping over the obstacles.
Gait generation techniques: aModel based gaits; bBiological mechanism-based gaits; cNatural dynamics-based gaits; dStability criterion-based gaits.
Controllers implemented: 3PID; 4FLC; 8MPC; 11Petri-Net; 12Hybrid RA-FLC; 13Kalman Filter; 14Gaze Control.
3.5. Gait generation for avoiding the dynamic obstacles
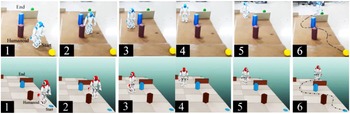
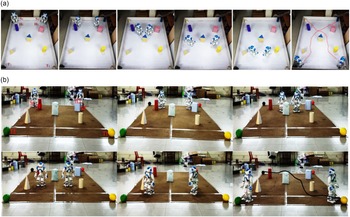
Many pieces of research have been carried out regarding the obstacles on the path of any biped robot. The proposed techniques and framework are efficient for avoiding, crossing, or stepping over stationary or static obstacles but do not consider moving or dynamic obstacles, representing a more realistic picture of walking in the natural environment. In this direction, Kashyap et al. [Reference Kashyap, Parhi, Muni and Pandey259] proposed an integrated DWA-TLBO (Dynamic-Window Approach and Teaching Learning Based Optimization) algorithm where positioning of target and obstacles are given to DWA as input for optimizing the speed and intermediate in-between consequences to TLBO and collectively evaluated optimum turning angle for avoiding the obstacles as shown in Fig. 12(b). The static navigation considers NAO, a mini-sized humanoid robot and stationary obstacles. In contrast, dynamic navigation considers several NAO robots where each NAO works as a dynamic obstacle for others with the help of a hybrid regression FL control approach, as shown in Fig. 12(a). The researchers designed and applied a Petri-net controller in every NAOs to avoid clashing and validated the simulation and experiment results.

Fig. 12. Experiment for self-navigation (a) by employing hybrid regression fuzzy logic control [Reference Kumar, Muni and Parhi253] (b) by employing hybrid DWA-TLBO [Reference Kashyap, Parhi, Muni and Pandey259].
Remark: This approach can lead us to develop a quick and robust architecture for a humanoid robot to move in real environment and work like human beings. Still, as per this research, one can observe that a typical network helps to identify the safe route and avoid collisions. At the same time, one cannot have networked with everything in the natural environment. Object detection by employing visual sensors and some RL algorithms makes it possible to work in a real-time environment for a humanoid robot. Furthermore, the gait generation for crossing the ditches has been explained in the next section.
3.6. Gait generation for crossing over the ditches
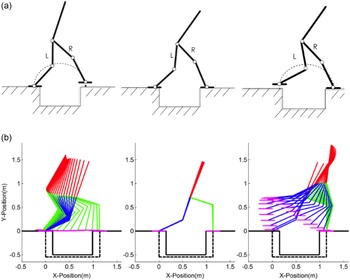
The gait generation for crossing the ditches has been studied by only a few researchers, which is discussed in this section. Vundavilli and Pratihar [Reference Vundavilli and Pratihar268] together proposed a gait planner for ditch crossing based on analytical modeling and two other techniques; NN and FL-based optimization of the dynamic balance margin and energy consumption for a 7-DOF biped robot. The NN and FL-based gait planners are trained offline by GA, enabling optimal online gait generation. The approaches other than the analytical modeling are more adaptive and more balanced for the minor energy consumption of a biped robot. In addition, Janardhan and Kumar [Reference Janardhan and Kumar269] developed a multibody dynamics framework for gait generation of 5-DOF biped robot as shown in Fig. 13(a), for giant steps and walking across wide ditches of width more significant than the leg length. The paths are produced using time-independent constraints based on the distance trekked by COM. The approach is suitable for a robot similar to an adult human for going across the ditch of 1.05 m width with 0.2 lowest coefficients of friction. Later on, Janardhan and Kumar R [Reference J. and P.K.270] again proposed an approach for generating the dynamically balanced ditch crossing gait of width equal to or more than the length of the leg of a 7-DOF biped robot. The developed algorithm is incorporated with adopted constraints and adaptively tunes the time. Figure 13(b) shows that the simulation gave optimal joint torques and angle trajectories. For better understanding, these approaches have been listed concisely in Table VI. Similarly, the challenges and approaches for gait generation on uneven terrains have been presented in the next section.

Fig. 13. Stich diagram of gait generation for crossing ditch (a) SSP, DSP [Reference J. and P.K.270] & SSP [Reference Janardhan and Kumar269] (left to right) phases of ditch crossing, (b) simulation of biped robot crossing ditch [Reference J. and P.K.270].
Table VI. Various approaches for multi-DOF biped robot’s gait generation for crossing the ditches.

Gait generation techniques: bBiological mechanism-based gaits.
Controllers implemented: 4FLC; 10NN.
3.7. Gait generation on the uneven terrains
Locomotion modeling on uneven terrain is challenging for modeling due to its uncertainties and not having specific patterns. That is why the foot placement is challenging to maintain dynamic balancing for biped robot walking on uneven or rough terrain. In this direction, worldwide researchers have developed LIPM-based biped model of massless legs [Reference Kajita and Tani97]; LIPM-based simplified model for 42-DOF humanoid robot HRP-4C with ZMP delay [Reference Kajita112]; 3D LIPM-based 12-DOF model [Reference Kajita, Kanehiro, Kaneko, Yokoi and Hirukawa106]; algorithm for adopting 30% and 20% deviation in prescribed speed and step length respectively [Reference Dunn and Howe272]; moving horizon technique for inheritance of human walking behavior on the INRIA designed biped robot “BIP” [Reference Azevedo, Poignet and Espiau12]; versatile walk control framework by utilizing an ultrasonic reach sensor for straight upset pendulum-based biped robot “Meltran-II” [Reference Kajita and Tani104]; Poincare sections for asymptomatically stable periodic gait while regulating the impact of foot on the ground for an underactuated biped robot [Reference Grizzle, Abba and Plestan273]; horizontally composed plane having unknown step height for a biped mechanism made up of viscous elastomer [Reference Yamaguchi, Takanishi and Kato274]; a hybrid control consisting impedance control and CTC for swing leg and stance leg respectively with higher damping of leg while making contact with the ground [Reference Park and Chung275] and a robust adaptive controller inspired from “Turkey Walking” by virtual control for controlling speed, posture, and height [Reference Chew and Pratt276].
Furthermore, Pratt et al. [Reference Pratt, Chew, Torres, Dilworth and Pratt279] developed an algorithm virtually with intuitive natural dynamics and applied it on Spring Turkey and Spring Flamingo based on a 7-link planar biped robot having contact switches on the foot. Furthermore, Manchester et al. [Reference Manchester, Mettin, Iida and Tedrake179] designed a controller by first making a lower-dimensional arrangement of directions cross-over to the objective cycle and then utilizing a subsiding skyline input regulator to dramatically balance out the linearized elements of the cross-over states relevant to HZD system and obtained the gait of non-periodic trajectories and switching over rough and irregular terrains. Addedly, Iida and Tedrake [Reference Iida and Tedrake280] employed open-loop sinusoidal oscillation of hip actuator and developed a biped model of passive gait based on compass gait by changing the parameters of the oscillator.
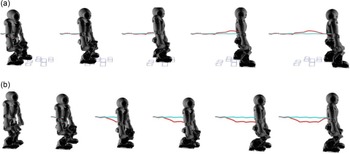
Intelligence-based gait generation techniques have been employed to improve the biped gaits’ robustness on uneven terrain. In due course, Ma et al. [Reference Ma, Li and Qiao281] proposed hybrid intelligence methodology based on fuzzy NN controller and improved learning speed of any mobile robot to be controlled by itself on a real-time basis for sensing the direction of movement, target position by optical range finder and distances among various directions between obstacles with the help of ultrasonic sensors in an unknown environment. In addition to, Kanoulas et al. [Reference Kanoulas, Tsagarakis and Vona278] introduced a scheme for modeling, mapping, and tracking of rough rocky terrains for proper foot placement of robots on real-time data obtained from RGB-D and IMU sensor with the help of a set of parameterized patch models and bio-inspired sampling algorithms as shown in Fig. 14(a) and (b). The foot contacts are detected as bounded curved patches similar to foot support consisting of sparse seed point sampling, point cloud neighborhood search, and patch fitting and validation. The researchers also applied a 3D foothold perception architecture that utilizes the developed patch mapping and tracking scheme, as shown in Fig. 14(c). In general, the dynamically stable robots fail to walk on slippery terrain; the authors [Reference Chen and Goodwine282] suggest using moderate speed, short step lengths, and swing backward velocity. In addition to, Zamparelli et al. [Reference Zamparelli, Scianca, Lanari and Oriolo283, Reference Zamparelli, Scianca, Lanari and Oriolo284] generated online trajectories for CoM and ZMP by using the stability constraints with the help of an intrinsically stable MPC controller and applied it on the NAO, which is shown in Fig. 15. The presented problems collectively can be termed as the unknown environment, as demonstrated in the next section.

Fig. 14. (a) Patches of various types and fits with noise range samples (blue) [Reference Kanoulas and Vona277], rock model mapping by an RGB-D Kinect sensor (right) [Reference Kanoulas, Tsagarakis and Vona278], (b) the principle of the homogeneous patch map [Reference Kanoulas, Tsagarakis and Vona278], (c) Human selected patches, in RGB-D recordings [Reference Kanoulas, Tsagarakis and Vona278].

Fig. 15. Dynamic simulation of the NAO humanoid robot where red color represents the trajectory of the CoM (center of mass), and blue color represents the same trajectory without variation in vertical height (a) The NAO is stepping over the boxes of different heights, (b) The NAO walking on flat surface by lowering its CoM [Reference Zamparelli, Scianca, Lanari and Oriolo283, Reference Zamparelli, Scianca, Lanari and Oriolo284].
3.8. Gait generation in the unknown environment
When modeling and mapping the exact perspective of the unknown or uncertain environment, it becomes difficult for a biped robot to make a quick decision based on observational and sensory data collected by various sensors and devices. The robot must have a quick decision-making framework that makes it an intelligence-inbuilt mechanism. That is, more advanced technologies are required for doing so. Along with the decision policy, its controller also needs to perform the basic controlling operations for maintaining the dynamic balancing instantaneously. In comparing the various perspectives of intelligence in robotics and mechatronics, it can be said that animals are adaptable to their environments, and humans make some changes in the environment for comfort [Reference Fukuda and Arakawa285]. That means basic intelligence is all about being adaptive to the dynamic environment and making some improvements in the environment is advanced intelligence.
This section attempts to cover all perspectives and techniques proposed by various researchers around the globe in this direction. The bending of the knee joint at the lower hip position consumes more actuator torque. It was found that the minimum and maximum vertical distances between the ground and hip joint, and length of the shank and thigh greatly affect the torque [Reference Ding, Yang and Gan286, Reference Bian, Shao, Yang and Liang287]. The hip height has noble importance for stability, optimum actuator torques, preventing the link’s velocity discontinuities, and deriving the lower torso’s modified motion. Initially, a foot mechanism was configured by Yamaguchi et al. [Reference Yamaguchi, Kinoshita, Takanishi and Kato288] for two biped robots WAF-3 and WL-12RVIII, to evaluate the relative position of foot support concerning the landing surface and the inclination of the ground.
Many researchers have proposed RL and training modules for interpolating intelligence and intuitive inheritance in bipedal walking robots. Such as, Capi et al. [Reference Capi, Nasu, Barolli and Mitobe289] used the inherited data from human locomotion and implemented all learnings to the radial basis function neural network (RBFNN) algorithm to generate the real-time gaits by using a visual system for making an autonomous humanoid robot based on a minimum energy principle. The results obtained from the GA and RBFNN were verified and compared by simulation on the humanoid robot “Bonten-Maru I.” In addition to, the RL CPG actor-critic method learnt by policy gradient algorithm was implemented while introducing new schemes to the actor [Reference Nakamura, Mori, Sato and Ishii290]. Also, Pasandi et al. [Reference Pasandi, Dinale, Keshmiri and Pucci291] discussed a CPG encompassing a novel bounded output oscillatory coherent network. Here, each oscillatory mechanism configures one dimensional intermittent function as a stable limit cycle. The CPG access the online trajectories library and generates the trajectory in real-time for the iCub humanoid robot. Later on, Mousavi et al. [Reference Mousavi, Nataraj, Bagheri and Entezari292] and Bagheri et al. [Reference Bagheri and Mousavi293] developed a mathematical model to evaluate the path of the combined trajectory of a 7-DOF biped robot on different terrains. The effects of hip height on the torso’s modified motions and then applied third-order spline was applied due to high accuracy and precision for determining the inverse kinematic, dynamics, and control variables.
Similarly, Rioux and Suleiman [Reference Rioux and Suleiman294] conjointly presented an entire navigation framework for a humanoid robot by creating a map of the environment and setting some primitives as a base knowledge for loading weights and avoiding obstacles without any sensors. The researcher presented an efficient filtering procedure to enhance the performance of the SLAM algorithm and clear the field by removing the cart from the view. The approach experimented on the NAO humanoid robot having an RGB-D sensor. In addition to this, Luo et al. [Reference Luo295] developed a real-time terrain realization sensory system, as shown in Fig. 16, by confining the vital hardware to a microprocessor and a single sort of force sensor and also investigated the gait pattern performance by grouping the SVM (Support Vector Machine) algorithm. The authors observed that reinforcement learning,NN, CPG, mapping of the environment, and sensors-based systems had helped the researchers to make biped robots capable of walking in any unknown environment. Following that, the authors attempted to summarize the trends of previous research works discussed in Section 4.

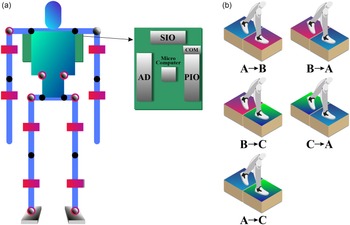
Fig. 16. (a) schematic diagram of hardware and configuration of robot and (b) transition phases between two distinct surfaces where A, B, and C represent smooth wood, smooth foam, and rough foam, respectively.
4. Discussion
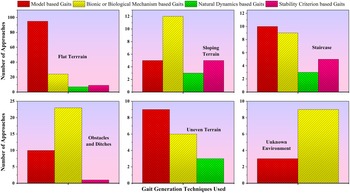
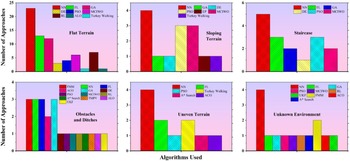
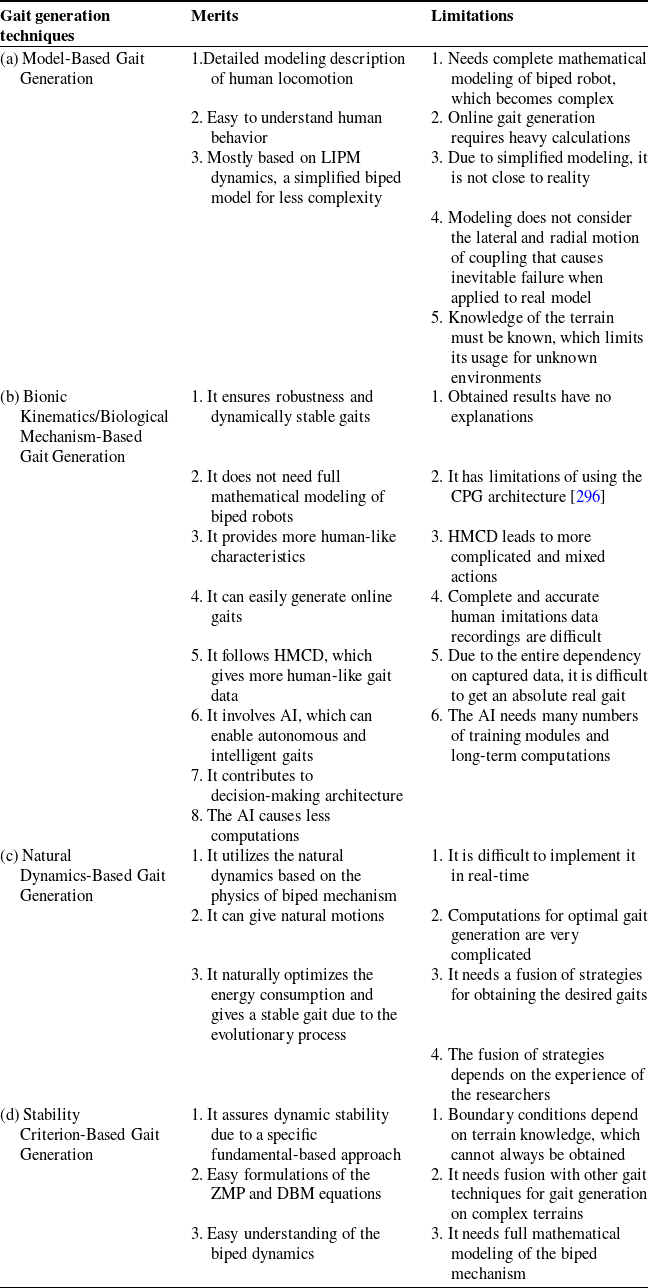
The above study has been carried out with the perspective of the gait generation techniques, which have been compared with their merits and limitations in a broad way under Table VII, and their frequency of application has been presented in Fig. 17.
Table VII. Merits and limitations of all gait generation techniques.
TMPV: Topological Map with Pure Vision-based Algorithm; UKF: Unscented Kalman Filter.
While observing the above figure, it can be said that most of the approaches have adopted the model-based gait followed by biological mechanism-based gait, stability criterion-based gait, and natural dynamics-based gait generation techniques and also have utilized the mixed approach of more than one or two techniques for least computation and obtaining the optimal gaits. Model-based gait generation methods include optimizing gait parameters, reference trajectories, and LIPM dynamics. It is more traditional and fundamental, which requires a precise dynamic model of the robot. Moreover, the biological mechanism-based gait generation is motivated by various algorithms for natural biological evolution that do not require a precise dynamic model. Further, for obtaining the online gait parameters, few researchers considered NN, FL, CPG, HMCD, and GA algorithms. The online gait planner will allow to account for any difficulty arising from the complexity of the terrain. It has also been observed that many researchers expressed more interest on biological mechanism-based gait generation techniques which is shown in Fig. 17.

Fig. 17. Demonstration of number of approaches which utilized particular gait generation techniques based on the literatures covered under this article.

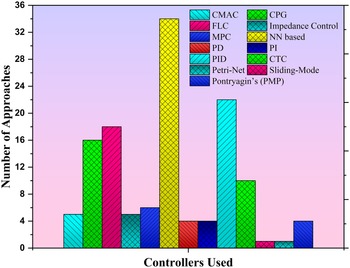
Fig. 18. Various controllers applied for biped gait generation on various terrains.
Figure 18 shows the various controllers used in biped robots while generating the gait on various terrains. It has been found that most of the approaches have implemented the NN-based controllers, followed by PID, FLC, CPG control scheme, CTC, MPC, CMAC, impedance control, PI, PD, PMP, SMC, and Petri-Net controller. Among all other controllers, the NN controllers clearly show their importance due to their inherent learning characteristics. While Fig. 19 represents the applications of various intelligent algorithms such as FL, GA, PSO, MCIWO, RL, DE, turkey walking, FMM, ACO, A * Search, ALO, TMPV, and UKF algorithms which have been utilized in various approaches to generate the smooth biped gait by optimizing various parameters such as disturbances, overall power consumption, joint torques, and desired joint angles. When comparing various gait generation algorithms across all terrains, it becomes clear that the NN has been incorporated into the majority of techniques. It is due to its inherited learning features and the fact that it keeps improving the results in further computations. Therefore, NN’s performance is more adaptive compared to the other algorithms. Many researchers found that the performance of NN, FL, GA, RL, MCIWO, PSO, and DE is more while generating the gait on flat terrain, ascending and descending the stair and sloping surfaces. Further, researchers also employed FMM, NN, GA, and FL equally while navigating through the obstacles and ditches, as well as giving weight to ACO.

Fig. 19. Frequency of optimization algorithms applied for biped gait generation on various terrains.
5. Conclusions
In this article, the authors have demonstrated a complete analysis of various approaches related to gait generation of the biped robot based on the four types of gait generation techniques and listed their findings below.
-
• The authors found that there is no systematic methodology and common evaluation practices for comparison between any two or more approaches due to diversity of the applied gait generation techniques, design of the robots, degrees of freedom, power sources, controller, testing for specific tasks to perform.
-
• The need for gait generation strongly depends on the application domain, terrain condition, and specific scenario.
-
• Due to the uniqueness of every biped robot and terrain specifications, it is not possible to conclude or compare the results obtained from two or more approaches. Since the research field of biped robots is interdisciplinary, it is difficult to develop unified solutions, which are our Objective I and II. Still, to solve the problem, the authors have attempted to partially fulfill it by developing the taxonomy on two basic aspects of the biped robot: design issues of the biped robot, and the second one is gait generation of the robot on different terrains. One should opt suitable approach based on the available resources and skills. It is suggested that the researchers around the worldwide need to develop a unique universal approach, which can design and modify the properties of the biped robot for predicting the gait, velocity, acceleration, torque, power consumption, DH parameters, and construction cost etc.
-
• Despite of researching the biped gait for so long, the other side of the robot building and realizing the human walking, the less discussed perspective is the cost of making the humanoid robot which also needs to be discussed for optimizing the resources and making it in the reach of the normal people so that it can boost the innovation in this field exponentially. It might be the solution for our Objectives I and II.
-
• For Objective III, the authors found that many researchers have developed various algorithms for successively generating the gait on different terrains, but still, the research is not close to imitating the human motion exactly, and only a few approaches have shown great development.
-
• For Objective IV, it can be said that the researchers must opt for complex problems by considering the real-time constraints of obstacles, the environment and its functioning, similar to human beings.
-
• Stable gait generation of the biped robot on various terrains is challenging. Keeping this in mind, the authors have attempted to cover most of the approaches developed by worldwide researchers for generating the biped gait on various terrains in the current article. Gait generation of the biped robot is based on the concept of the center of mass and ZMP. The forward and inverse kinematics need to be solved to obtain the proper gait generation initially. In addition, a polynomial curve is required to achieve smooth gait generation on various terrains. Moreover, the dynamics of the biped robot are obtained from a Lagrange-Euler formulation, which is helpful for determining the torque required for each joint. Further, compass gait, inverted pendulum, or double inverted pendulum helps to control the biped’s locomotion in a simplified manner.
-
• It has been found that the joints at the ankle, knee, and hip are crucial in dynamic balancing. Most researchers reported that the hip joint consumes more torque when compared with the other joints because the hip joint is used to carry other links and joints of the leg.
-
• A controller is required to control each joint of the biped robot smoothly. Up to now, worldwide researchers have developed various types of traditional controllers such as PI, PD, PID, sliding mode, and observer-based controllers to control the biped robot. However, tuning the gains of the conventional controllers is challenging and time-consuming. To overcome this difficulty, few researchers have recently developed non-traditional controllers such as GA, PSO, DE, IWO, MCIWO, NN, FLC. It has also been observed that the non-traditional controllers perform better while the biped robot walks on various terrains.
-
• Further, the entire navigation of the biped robot can be obtained by generating a map of the environment by avoiding obstacles. It has been observed that few researchers suggested that the vision-based algorithm is suitable for the biped robot navigation strategy based on the topological map or VM using an RGB-D camera.
Finally, it concludes that this review will help the researchers to choose the suitable gait generation techniques and to generate dynamically stable gait of the biped robot while walking on various known and unknown terrains.
6. Scope for future work
Developing a dynamically balanced gait generation for the biped robot on various terrains is challenging. Many researchers have tried to generate a dynamically balanced gait on various terrains without any controller. But, based on the current review, the authors found that a proper control algorithm is required to develop more dynamically balanced gaits on various terrains. It has been observed that most researchers have considered limited degrees of freedom and performed simulations only, but few researchers have tried to implement it in real time. To mimic the complete human motion, researchers have developed the gait generation on many degrees of freedom of the biped robot. Currently, the authors are working on a complete human model and developing a novel control algorithm for the biped robot, which will help to maintain the dynamically balanced gaits on various terrains.
Financial support
Not applicable.
Conflicts of interest
The authors declare that they have no conflict of interest.
Authors’ contributions
First author. Moh Shahid Khan; has been actively involved in the literature review and writing of the article.
Second author. Dr Ravi Kumar Mandava; has been actively involved while drafting the article.
Ethical considerations. The authors followed ethics while writing the article.
Consent to participate. Yes. The authors agreed to take part in the study.
Consent for publication. Yes. The authors agreed to publish the work after acceptance.