



1. Introduction
The current vessel traffic management and monitoring systems developed for restricted/confined waters such as port waters, fairways and straits should be migrated to the intelligent systems with e-navigation function in the era of big data analytics and artificial intelligence. The maritime sectors and port authorities, as well as information technology companies, have already collaborated to develop next-generation vessel traffic management and monitoring systems.Footnote 1 Ship collision risk assessment, ship traffic hotspot detection and prediction, and collision-avoidance-based ship path planning are essential for such systems, as shown in Figure 1. This is because a collision between ships could result in severe consequences, especially in the restricted waters with a high ship traffic density. Ship collision risk identification and estimation are at the core of ship collision avoidance processing. For example, a ship with high collision risk is a warning signal for the ship to take action for collision avoidance by means of the navigation systems. A smart navigation system can forecast possible ship collision locations, times and collision hotspots, and it can also guide ship path optimisation to avoid a crash and support ship traffic management. The dynamic ship collision risk estimation should consider physical navigation conditions and crew behaviours associated with vessel manoeuvrability, velocity variation and course adjustment. Determination of a ship-collision-risk-averse navigation path for a critical ship is a complicated and essential task when multiple vessels turn in proximity to one another.

Figure 1. Traffic control in restricted waters
This study aims to review the relevant articles focusing on the three research topics for vessel traffic management and monitoring in restricted waters over the latest decade (2011–2021): (i) ship collision risk assessment, (ii) ship traffic hotspot detection and prediction, and (iii) collision-avoidance-based ship path planning. Ship collisions are frequent in confined waters and cause disastrous consequences. As for maritime safety authorities, the ship collision risk estimation for the encountered ships is essential to understand the current ship collision risk level, recognise the most dangerous individual ship, and evaluate the performance of ship collision risk mitigation and safety management. Historical ship travel data can be applied to determine the hierarchical geographical distribution for the vessel collision risk in restricted areas and to identify the high-ship-collision-risk places (same as precautionary areas). Nowadays, with the emergence of modern unmanned ships and ports, more attention is needed on the real-time ship movement-based ship collision risk hotspot prediction to further guide safe navigation in ports. With these advanced sensor and communication technologies, automatic vessels and intelligent ports are the trends for the near future. Therefore, collision-avoidance-based ship path planning for restricted waters is significant for assessing the effect of the trajectory adjustment actions that a critical ship takes for reducing the ship collision risk. Furthermore, it also can guide the automatic vessels sailing at the safest and most efficient path in confined waters. Therefore, this paper systematically analyses the models, formulation and approaches for ship collision risk assessment, ship traffic hotspot detection and prediction, and collision-avoidance-based ship path optimisation to better grasp the advantages of current research and their inter- and intra-categorical relationships, as well as to identify gaps and future effort directions. These findings will offer more insight to the related researchers and navigation industry.
2. Methods and materials
This study was conducted through the following steps: (1) define the research questions and objectives; (2) determine the eligibility criteria and data source; (3) perform the search strategy on relevant databases; (4) perform a data extraction process to screen relevant documents and (5) conduct analysis to answer the predefined questions and objectives.
2.1 Data source
Scopus is one of the largest abstract and citation databases of peer-reviewed literature, covering both journal and conference articles. Web of Science (WoS) SCI-EXPANDED is also a commonly accepted database of abstracts and references from high-quality scientific papers (Van Nunen et al., Reference Van Nunen, Li, Reniers and Ponnet2018). Google Scholar is unsuitable for bibliometric analysis due to its publication without checking originality, quality and quantity (Ampah et al., Reference Ampah, Yusuf, Afrane, Jin and Liu2021). Furthermore, Scopus and WoS are complementary (Kołakowski et al., Reference Kołakowski, Ampah, Wróbel, Yusuf, Gil, Afrane, Jin and Liu2022a, Reference Kołakowski, Gil, Wróbel and Ho2022b). We, therefore, merge the publications from both WoS and Scopus to minimise the limitation of potentially omitting significant papers by only using either of these two databases.
2.2 Eligibility criteria
The paper focuses on three research areas: (i) ship collision risk estimation, (ii) ship traffic hotspot detection and prediction, and (iii) collision-avoidance-based ship path planning in Scopus and WoS up to the year 2021. As the year 2022 was incomplete, publications indexed after December 31, 2021 in both databases are not included.
2.3 Search strategy
This paper uses keywords ‘ship collision risk’ or ‘vessel collision risk’ or ‘collision risks of the vessel’ or ‘collision risk of ships’ for searching the research on ship collision risk estimation, collects papers on the second research area based on keywords ‘hotspots detection’ and ‘maritime’ (or ‘port’ or ‘waterway’), and employs the keywords ‘ship path planning’ or ‘ship route planning’ or ‘ship trajectory planning’ or ‘path planning of vessel’ or ‘route planning of vessels’ or ‘trajectory planning of vessel’ to search the research on collision-avoidance-based ship path planning.
2.4 Extraction process
After reading over the abstracts of these 150 articles including keywords associated with ship collision risk in Scopus, we identified 84 articles related to the first research area. However, there are only 14 papers on the second research area, and these mostly focus on historical data-driven hotspots analysis, so the real-time data motivated hotspots detection has rarely been considered. These findings indicate that the real-time data access, storage, processing and implementation are challenging tasks in maritime transportation. This could be a future avenue and is meaningful to identify critical ships and the implementation of ship path optimisation as the diffusion measures to mitigate the possibility of disastrous accidents.
For the third research area, we found 39 journal papers and 18 conference papers after refinement by careful inspection. Maritime navigation has gained increasingly more attention recently, as have vessel collision risk estimation and path optimisation. Ship traffic hotspot detection and prediction has attracted attention since 2010, which may be related to the access to massive historical data derived from an advanced navigation communication system, as shown in Table 1.
Table 1. Details for keyword strategy and extraction process

3. Major research focuses and developments on ship collision risk assessment
3.1 What is the ship collision of encounter ships sailing in restricted waters?
Ship collision is the physical impact that occurs in encounter ships leading to a damaging accident. The damage may go beyond that measured by a monetary cost. The development of huge and heavy ships with a large speed, in accordance with the increase in maritime traffic and technological advancements, will also increase the risk of such collision accidents. As for maritime safety authorities, the collision risk analysis for the encountered ships is essential to understand the current ship collision risk level, recognise the most dangerous individual ship, and evaluate the performance of ship collision risk mitigation and safety management. The ship collisions are associated to various encounter situations, as shown in Figure 2, where regions B, C and E are the crossover encounters, region A is the head-on encounter, and region D is the overtaking encounter. The various encounters can be identified based on the course of both ships. Ship collisions associated to various encounters will result in different consequences, for example, the damage to the ship hull in the head-on situation may be more serious than other types of encounters.

Figure 2. Ship collisions connected with various encounters
3.2 What is the consequence of the ship collision?
The potential consequences connected with collision accidents include social, economic and environmental influences, such as human injuries, fatalities, downtime, cargo damage, economic loss and oil spillage (Dong and Frangopol, Reference Dong and Frangopol2015; Sotiralis et al., Reference Sotiralis, Ventikos, Hamann, Golyshev and Teixeira2016; Christian and Kang, Reference Christian and Kang2017; Luo and Shin, Reference Luo and Shin2019; Zhang et al., Reference Zhang, Wang, Meng and Xie2019d). Also, there may be indirect impacts derived from ship collision accidents, for example, collision leading to an oil spill, the oil spill causing pollution in an aquaculture area and the polluted aquatic products subsequently affecting the health of humans. The real consequences are very hard to determine, and some of them use the simplified method to present the associated consequence, such as adopting the amount of oil spilt to represent the environmental consequences of tanker collisions (Pedersen, Reference Pedersen1995), the total amount of energy loss (Asmara et al., Reference Asmara, Kobayashi, Artana, Masroeri and Wakabayashi2014) or the damage penetration area of ships and repair costs (Dong and Frangopol, Reference Dong and Frangopol2015), to characterise the potential consequence. Current consequence assessment is often based on the ship's structural response model (Ståhlberg et al., Reference Ståhlberg, Goerlandt, Ehlers and Kujala2013) and qualitative methods with the linguistic state, such as the fuzzy model (Zaman et al., Reference Zaman, Kobayashi, Wakabayashi, Khanfir, Pitana and Maimun2014) and Bayesian Belief Network (BBN) (Goerlandt et al., Reference Goerlandt, Montewka and Kujala2014). The ship structural response model is associated with the scenario where the collision leads to a breach of the hull, subsequent flooding occurs, which in turn causes ship loss (Ståhlberg et al., Reference Ståhlberg, Goerlandt, Ehlers and Kujala2013), as well as another scenario where no significant hull damage occurs but the ship becomes disabled and drifts before subsequent obvious rolling, and finally to the ship capsizing. Qualitative analysis can identify the influence of ship collision on safety, environment and property, and can be further applied to the cost–benefit evaluation of control options in maritime transportation and be developed as a tool to assess the probability of accidents reduction associated with the mitigation measures. However, the qualitative methods often integrate linguistic terms and likelihood score or probability rank to figure out damage severity and occurrence possibility that may include the subjective view of the author and experts (Goerlandt et al., Reference Goerlandt, Montewka and Kujala2014; Zaman et al., Reference Zaman, Kobayashi, Wakabayashi, Khanfir, Pitana and Maimun2014).
As declared by Kang et al. (Reference Kang, Lu, Meng, Gao and Wang2019), there is no way to access the full complete dataset that has the potential to determine the accident probability, and associated accident severity and fatality rate. Thus, the simulation methodology incorporating a huge amount of big empirical data is trying to provide convincing results through conducting several potential collision scenarios. The validity and applicability of the proposed methodology may be questioned. For example, the expected fatalities are almost 0⋅01 per collision according to COWI (2008), which is problematic in covering restricted navigation areas because of the high dynamics in waterways and operation conditions. The potential consequence analysis remains interesting and challenging, and there is great need of a combination of tangible quantitative and qualitative robust methodologies to obtain a more reliable assessment. There are epistemic and aleatory uncertainties in consequences assessment due to the inaccuracies in estimation and the natural randomness (Mei et al., Reference Mei, Arshad and Tang2019; McKay et al., Reference McKay, Beckman and Conover2000), see Figure 3.

Figure 3. Generic framework of potential consequences analysis
3.3 How to define and evaluate the collision risk between encounter ships sailing in restricted waters
Current ship collision risk measurement can be grouped into ship safe boundary and ship collision risk level estimation, the synergetic ship collision risk function definition based on manoeuvrability parameters, and ship collision risk identification based on intelligent algorithms or systems. Newer approaches integrating the new technologies have been proposed since 2013, such as artificial intelligence (Mohamed-Seghir et al., Reference Mohamed-Seghir, Kula and Kouzou2021) and big data science (i.e. AIS) (Iphar et al., Reference Iphar, Napoli and Ray2020).
Ship safe boundary can be grouped into collision diameter and ship domain model, and its research development is shown in Figure 4. The ship domain can be characterised into various types, such as circular, empirical, elliptical, fuzzy, projected, quaternion, probability, and seafarers’ awareness-based types (Liu et al., Reference Liu, Zhou, Li, Wang and Liu2016; Yu et al., Reference Yu, Fang, Murray and Peng2019b; Zhang and Meng, Reference Zhang and Meng2019; Lee et al., Reference Lee, Furukawa and Park2021), and guides navigators to keep away from nearby vessels in a determined space. The shapes of different ship domains are illustrated in Figure 5. The classical Fujii, Goodwin and Davis ship domains are described by a circle, ellipse and fan-shape. The fuzzy ship domain can be defined as the degree of membership for an encounter situation to the fuzzy set of ‘dangerous navigation’ (Pietrzykowski, Reference Pietrzykowski2008). The quaternion ship domain comprises four elements, namely the longitudinal radius in aft and fore directions and the lateral radius in port and starboard directions (Wang, Reference Wang2010). The projected ship domain is to predict the following violation according to the current navigation status, and the shape can be a circle or other shapes. The probabilistic ship domain with a series of contours can be defined as follows (Goerlandt and Kujala, Reference Goerlandt and Kujala2014):

where $\alpha$ is the probability with $\textrm{0} \le \alpha \le \textrm{1}$
is the probability with $\textrm{0} \le \alpha \le \textrm{1}$ , $l(\theta )$
, $l(\theta )$ is equal to 2 nautical miles, ${f_{\Delta (\theta )}}(\omega )$
is equal to 2 nautical miles, ${f_{\Delta (\theta )}}(\omega )$ is the probability density function and $\delta (\theta )$
is the probability density function and $\delta (\theta )$ is the continuous random variable. Recently, a fuzzy quaternion ship domain was proposed for quantifying ship collision risk of inland ships near bridge-waters (Jinyu et al., Reference Jinyu, Lei, Xiumin, Wei, Xinglong and Cong2021). Ship domain models can be used to detect collision candidates (Chen et al., Reference Chen, Mou and van Gelder2017), such as using a minimum safety passing domain boundary (with ship collision risk equal to one) and an early warning ship domain (with ship collision risk equal to zero) to define the synergy ship domain (risk between zero and one) (Zhou et al., Reference Zhou, Liu, Wang and Ni2018) and applying the product of lateral and longitudinal ship collision risk (Ren et al., Reference Ren, Mou, Yan and Zhang2011), safety domain violation and overlap (Tam and Bucknall, Reference Tam and Bucknall2010a; Qu et al., Reference Qu, Meng and Suyi2011; Teixeira and Guedes, Reference Teixeira and Guedes Soares2018; Svanberg et al., Reference Svanberg, Santén, Hörteborn, Holm and Finnsgård2019; Wang et al., Reference Wang, Chang, Yuan, Shi and Bai2020a) to define the spatial ship collision risk. The ship domain model determined based on the big statistical data and AIS trajectory data depend on certain water areas with particular navigational situations and it is very difficult to isolate the influence of multiple parameters. The ship domain is highly connected with the expert knowledge, for example, the choice of surveyed crew, and leads to subjectivity. In terms of collision diameter, Li et al. (Reference Li, Meng and Qu2012) conducted a detailed review for the research before 2012, and it is easy to see that a new model has rarely been proposed since 2013 but extensive applications have been performed (Weng et al., Reference Weng, Meng and Qu2012; Silveira et al., Reference Silveira, Teixeira and Soares2013; Asmara et al., Reference Asmara, Kobayashi, Artana, Masroeri and Wakabayashi2014), such as the traffic characteristics based on Pedersen's model (Silveira et al., Reference Silveira, Teixeira and Soares2013) or Kristiansen's method (Asmara et al., Reference Asmara, Kobayashi, Artana, Masroeri and Wakabayashi2014) and integrating AIS data, as well as potential intersections between routes estimation (Christian and Kang, Reference Christian and Kang2017).
is the continuous random variable. Recently, a fuzzy quaternion ship domain was proposed for quantifying ship collision risk of inland ships near bridge-waters (Jinyu et al., Reference Jinyu, Lei, Xiumin, Wei, Xinglong and Cong2021). Ship domain models can be used to detect collision candidates (Chen et al., Reference Chen, Mou and van Gelder2017), such as using a minimum safety passing domain boundary (with ship collision risk equal to one) and an early warning ship domain (with ship collision risk equal to zero) to define the synergy ship domain (risk between zero and one) (Zhou et al., Reference Zhou, Liu, Wang and Ni2018) and applying the product of lateral and longitudinal ship collision risk (Ren et al., Reference Ren, Mou, Yan and Zhang2011), safety domain violation and overlap (Tam and Bucknall, Reference Tam and Bucknall2010a; Qu et al., Reference Qu, Meng and Suyi2011; Teixeira and Guedes, Reference Teixeira and Guedes Soares2018; Svanberg et al., Reference Svanberg, Santén, Hörteborn, Holm and Finnsgård2019; Wang et al., Reference Wang, Chang, Yuan, Shi and Bai2020a) to define the spatial ship collision risk. The ship domain model determined based on the big statistical data and AIS trajectory data depend on certain water areas with particular navigational situations and it is very difficult to isolate the influence of multiple parameters. The ship domain is highly connected with the expert knowledge, for example, the choice of surveyed crew, and leads to subjectivity. In terms of collision diameter, Li et al. (Reference Li, Meng and Qu2012) conducted a detailed review for the research before 2012, and it is easy to see that a new model has rarely been proposed since 2013 but extensive applications have been performed (Weng et al., Reference Weng, Meng and Qu2012; Silveira et al., Reference Silveira, Teixeira and Soares2013; Asmara et al., Reference Asmara, Kobayashi, Artana, Masroeri and Wakabayashi2014), such as the traffic characteristics based on Pedersen's model (Silveira et al., Reference Silveira, Teixeira and Soares2013) or Kristiansen's method (Asmara et al., Reference Asmara, Kobayashi, Artana, Masroeri and Wakabayashi2014) and integrating AIS data, as well as potential intersections between routes estimation (Christian and Kang, Reference Christian and Kang2017).

Figure 4. Research development of ship safe boundary

Figure 5. Shapes of different ship domains
The synergetic ship collision risk function definition integrating manoeuvrability variables can be applied to measure the vessel collision risk. The ship collision near-miss index (Kim and Jeong, Reference Kim and Jeong2016) is often calculated by the function incorporating some of the variables, including Distance (DCPA) and Time (TCPA) to the Closest Point of Approach, and course deviation, relative distance and azimuth between the own and target ships (Lisowski and Seghir, Reference Lisowski and Seghir1970; Szłapczyński and Śmierzchalski, Reference Szłapczyński and Śmierzchalski2009; Yang and Yang, Reference Yang and Yang2013; Gang et al., Reference Gang, Wang, Sun, Zhou and Zhang2016; Nguyen et al., Reference Nguyen, Zhang and Wang2018; Mohamed-Seghir et al., Reference Mohamed-Seghir, Kula and Kouzou2021). We also can use the Grey correlation formula to define the key collision avoidance ship (Liu and Liu, Reference Liu and Liu2016) combining with the ship collision risk index estimation. The research trend of vessel collision risk estimation based on manoeuvrability variables is as shown in Figure 6. It is obvious that the researcher first only considers DCPA and TCPA, and more parameters are considered with the development of ship collisions risk estimation. The formula of ship collision risk index integrating primary variables and its development is described as follows. The ship collision risk calculation only including DCPA and TCPA first proposed by (Lisowski and Seghir, Reference Lisowski and Seghir1970) is as follows:

where r is the ship collision risk, and ${r_{\textrm{RD}}}$ and ${r_{\textrm{RT}}}$
and ${r_{\textrm{RT}}}$ are the subjective parameters dependent on the navigator. Then, the function for the ship collision risk calculation connected with DCPA, TCPA and D (distance between ships) is first performed using (Szlapczynski, Reference Szlapczynski2006)
are the subjective parameters dependent on the navigator. Then, the function for the ship collision risk calculation connected with DCPA, TCPA and D (distance between ships) is first performed using (Szlapczynski, Reference Szlapczynski2006)

where D is the distance between encounter ships, ${D_s}$ is the safe distance for approaching ships, ${T_s}$
is the safe distance for approaching ships, ${T_s}$ is the necessary time to manoeuvre collision avoidance successfully and ${a_1},{a_2},{a_3}$
is the necessary time to manoeuvre collision avoidance successfully and ${a_1},{a_2},{a_3}$ are the coefficients of weights. The ship collision risk calculation based on DCPA, TCPA, D, ${\theta _T}$
are the coefficients of weights. The ship collision risk calculation based on DCPA, TCPA, D, ${\theta _T}$ and K can be formulated as follows (Gang et al., Reference Gang, Wang, Sun, Zhou and Zhang2016):
and K can be formulated as follows (Gang et al., Reference Gang, Wang, Sun, Zhou and Zhang2016):

where ${\mu _{\textrm{DCPA}}}$ , ${\mu _{\textrm{TCPA}}}$
, ${\mu _{\textrm{TCPA}}}$ , ${\mu _D}$
, ${\mu _D}$ , ${u_{{\theta _T}}}$
, ${u_{{\theta _T}}}$ and ${u_K}$
and ${u_K}$ are the ship collision risk based on DCPA, TCPA, D, the direction of the target ship ${\phi _T}$
are the ship collision risk based on DCPA, TCPA, D, the direction of the target ship ${\phi _T}$ and the ratio of the speed of the target vessel and the own vessel K, respectively. Additionally, ${\omega _{\textrm{DCPA}}}$
and the ratio of the speed of the target vessel and the own vessel K, respectively. Additionally, ${\omega _{\textrm{DCPA}}}$ , ${\omega _{\textrm{TCPA}}}$
, ${\omega _{\textrm{TCPA}}}$ ,${\omega _{{D_R}}}$
,${\omega _{{D_R}}}$ ,${\omega _{{\theta _T}}}$
,${\omega _{{\theta _T}}}$ and ${\omega _K}$
and ${\omega _K}$ are the corresponding weights. Some other models have been proposed by integrating other manoeuvrability parameters, such as by Huang et al. (Reference Huang, Van Gelder and Mendel2016) and Huang and van Gelder (Reference Huang and Van Gelder2019), as well as Li et al. (Reference Li, Wang, Guan and Pan2020) using the overlap of velocity obstacle $\textrm{VO}$
are the corresponding weights. Some other models have been proposed by integrating other manoeuvrability parameters, such as by Huang et al. (Reference Huang, Van Gelder and Mendel2016) and Huang and van Gelder (Reference Huang and Van Gelder2019), as well as Li et al. (Reference Li, Wang, Guan and Pan2020) using the overlap of velocity obstacle $\textrm{VO}$ and reachable velocity $\textrm{RV}$
and reachable velocity $\textrm{RV}$ to define ship collision risk, and Zhang et al. (Reference Zhang, Goerlandt, Montewka and Kujala2015a) applied the function of relative speed, relative course and relative distance to characterise the near-miss ship collision risk. Fang et al. (Reference Fang, Yu, Ke, Shaw and Peng2018a) integrated the location for the ship to start collision avoidance to calibrate the model of Zhang et al. (Reference Zhang, Goerlandt, Montewka and Kujala2015a) to reveal the regional ship collision risk inside ports. Recently, Yu et al. (Reference Yu, Fang, Murray and Peng2019b) proposed the direction-constrained space–time prism-driven approach that includes current ship movement characteristics and the subsequent manoeuvrability prediction for estimating potential multi-ship collision risks. It is obvious that there is increased development in ship collision risk analysis for obtaining more accurate results and providing them more intuitively to navigators. However, current existing models describe the linear and nonlinear relationship between factors and collision in a function that has various formulae and different considered variables. In addition, some ship collision risk estimation based on these parameters highly depends on the target ship, such as the encounter angle and distance to the target vessel.
to define ship collision risk, and Zhang et al. (Reference Zhang, Goerlandt, Montewka and Kujala2015a) applied the function of relative speed, relative course and relative distance to characterise the near-miss ship collision risk. Fang et al. (Reference Fang, Yu, Ke, Shaw and Peng2018a) integrated the location for the ship to start collision avoidance to calibrate the model of Zhang et al. (Reference Zhang, Goerlandt, Montewka and Kujala2015a) to reveal the regional ship collision risk inside ports. Recently, Yu et al. (Reference Yu, Fang, Murray and Peng2019b) proposed the direction-constrained space–time prism-driven approach that includes current ship movement characteristics and the subsequent manoeuvrability prediction for estimating potential multi-ship collision risks. It is obvious that there is increased development in ship collision risk analysis for obtaining more accurate results and providing them more intuitively to navigators. However, current existing models describe the linear and nonlinear relationship between factors and collision in a function that has various formulae and different considered variables. In addition, some ship collision risk estimation based on these parameters highly depends on the target ship, such as the encounter angle and distance to the target vessel.

Figure 6. Changes of functions of ship collision risk estimation based on manoeuvrability variables over time
Comprehensive consideration of ship safe boundary and manoeuvrability parameters can be achieved by potential collision risk definition based on manoeuvrability parameters and then using it to define the potential ship domain (Im and Luong, Reference Im and Luong2019) or using the ship domain (calculating the safety distance (Yang and Yang, Reference Yang and Yang2013; Wang et al., Reference Wang, Yan, Wang and Wu2017) and dangerous margin (Liu et al., Reference Liu, Wu and Zheng2019a)) to support collision risk value calculation. With the development of artificial intelligence technology, collision risk identification based on intelligent algorithms or systems is attracting increasingly more attention. For example, fuzzy logic inference (Bukhari et al., Reference Bukhari, Tusseyeva and Kim2013; Chen et al., Reference Chen, Ahmad, Lee and Kim2014), Dempster–Shafer (D-S) evidence theory (Li and Pang, Reference Li and Pang2013), improved BP neural network (Lin and Yuan, Reference Lin and Yuan2018), artificial neural network (Namgung et al., Reference Namgung, Jeong, Kim and Kim2019) and artificial potential field can be used to obtain the collision risk in the open sea with multi-source observation data. These models make it more convenient to deal with ship collision risk estimation associated with multi-source big data. It needs further improvement to discriminate against the collision risk change derived from unstable state and near-collision situations to improve the efficiency of decision-making.
Quantitating ship collision risk estimation has gained more interest, while the real-time ship collision risk estimation incorporating dynamic navigation environment and uncertain human behaviours is still challenging. First, the current near-miss index does not consider the correlation between different parameters, ignores the effects of vessel type and size, weather, and hydrodynamic conditions, and even the dynamic characteristics of the target ship. Second, the majority of simulation analyses, from the aspect of own-to-one target or own-to-many targets with the assumption the target ship does not change its speed and course and neglect the loss of speed in the turning phase of the vessel (Szłapczyński and Śmierzchalski, Reference Szłapczyński and Śmierzchalski2009), maintain significant differences between real navigation. Third, navigational situations estimation considering different factors such as speed, course, manoeuvring capability and International Regulations for Preventing Collisions at Sea (COLREGS) rules may determine ship domains in various shapes and types, and cannot be modified dynamically in different water areas and adapt to complex traffic environment. Finally, most of the current research says that their ship collision risk estimation is suitable for both the open sea and restricted waters, but mostly implement experiments in the open sea with constant sailing speed for the target ship and assuming obstacles with a regular shape or with certain ship pair encounters, and only a few involved legs in the marine strait, restricted water areas and inside ports.
3.4 Ship collision risk assessment for restricted waters
Vessel traffic safety is one of the dominant concerns in restricted waters and has attracted much attention from the transportation, scientific and management domains. With the increase of high speed and larger ships and the continued construction of the offshore structure, the ship collisions would result in a catastrophic consequence. Thus, ship collision risk estimation, collision risk mitigation and collision prevention become significant in confined areas. Ship collision risk for restricted waters can be achieved through summarisation of the ship collision risk from all individual encounters, statistical analysis of historical collision accidents, and the product of geometrical near-miss collision avoidance frequency and causation probability, as shown in Table 2.
Table 2. Ship collision risk assessment for restricted waters

The ship collision risk in restricted waters can be derived by summarising the ship collision risk from all individual encounters, for example, Fang et al. (Reference Fang, Yu, Ke, Shaw and Peng2018a) first calculated the collision risk between individual encounter ships based on relative distance, relative speed and relative course, and then adopted the maximum, total and mean ship collision risk values for all the encounter ships to reveal the hierarchical spatiotemporal ship collision risk distribution in the port areas. Therefore, the methodologies in Section 2.3 can promote the accuracies and capabilities of ship collision risk estimation in restricted waters, and in turn, outcomes from research on ship collision risk assessment in restricted regions could also provide traffic characteristics and ship collision risk distributions to facilitate individual collision risk modelling (Chen et al., Reference Chen, Huang, Mou and van Gelder2019b). These two perspective types of research mutually facilitate each other.
Statistics of historical ship collisions mostly are involved in detecting the causal factors on crash accidents in different confined waters. For instance, the amount of draft of the ships can easily lead to collision in confined waters. Also, the product of geometrical near-miss collision avoidance frequency and causation probability can be used to characterise the ship collision risk in waterways, such as speed dispersion, degree of acceleration and deceleration, and ship domain overlap (Qu et al., Reference Qu, Meng and Suyi2011), which can be used to evaluate the ship collision risk of waterways from the statistical perspective.
The research topic on ship collision risk estimation in restricted waters remains popular. Assessing the availability of collision risk definitions and modelling methodologies, as well as improving their applicability and efficiency in actual vessel collision probability estimation, is promising.
3.5 Causes of ship collisions
The causes of collision can be grouped into human elements, ship and equipment factors, environmental issues, and management factors (Wang et al., Reference Wang, Wang, Jiang, Wang and Yang2020b; Zhang et al., Reference Zhang, He, Fan, Yan and Soares2021). Human elements include navigation facilities misuse, fatigue and false diagnosis of the navigation situation at the perception stage; deficient consideration of hydrodynamic and weather conditions, ignorance of signals, unsuitable selection in route, and error assessment of collision risk at the decision-making phase; and incorrect ship operation, improper collision avoidance, delay action and excessive speed at the action stage. Ship and equipment factors comprise instrument failure, navigation aid system failure, uncoordinated communication system and improper display of electronic chart. Environmental issues include heavy traffic, poor visibility, serious weather and a bad channel environment (Liu et al., Reference Liu, Yu, Yuan, Yang and Shu2021). Management factors consist of inappropriate regulation, improper shifting of duty, incomplete navigation information, inadequate training experience and lack of certification (Montewka et al., Reference Montewka, Goerlandt, Innes-Jones, Owen, Hifi and Porthin2014a).
Most of the current research using the accident report to support the collision cause analysis through a back-propagation neural network (Wang et al., Reference Wang, Wang, Jiang, Wang and Yang2020b), the event tree (Montewka et al., Reference Montewka, Ehlers, Goerlandt, Hinz, Tabri and Kujala2014b), Bayesian analysis (Qu et al., Reference Qu, Meng and Li2012; Wu et al., Reference Wu, Yip, Yan and Mao2020) and text mining (Shi et al., Reference Shi, Zhang, Su, Zhang, Sun and Yao2019). The event tree methods follow Boolean logic that cannot reveal the reality of events with more than two states that limit the practicability in systematic ship collision risk estimation and management. Bayesian analysis allows inference in both directions, which means the back-propagation of collision probabilities can be used in the ship collision risk assessment phase and can determine the most important nodes and point out the valid way to improve the results of the model through multi-scenario thinking. Test mining is the emerging new technology with the development of artificial intelligence and machine learning, which facilitates information extraction from the text material.
These methods have provided effective tools to analyse collision causation probability, as shown by the generic framework in Figure 7. It can be applied to analyse the causal factors of ship collisions and their characteristics, which can act as the reference for regional maritime safety management. However, there are still some upcoming issues that need to be dealt with in future research. For example, Wang et al. (Reference Wang, Wang, Jiang, Wang and Yang2020b) said that delay action and incorrect collision estimation are more likely to cause accidents compared to other reasons. Shi et al. (Reference Shi, Zhang, Su, Zhang, Sun and Yao2019) hold the opinion that lack of enough rest and inappropriate lookout and pilotage are the primary causes, followed by error collision risk estimation. Such findings indicate that collision causation analysis may be highly relevant to the data included, estimation methods and chosen research areas, and even cause contradictory conclusions. Improving the accuracy and adaptability of collision risk causes analysis is essential in the maritime transportation industry. Spatiotemporal factors including navigation strategy, ship manoeuvrability, traffic features, and dynamic environment corresponding to real collisions and truly reflecting the dangerous conditions ship encountered are useful to determine more precise ship collision risk value and implement suitable mitigation strategies.
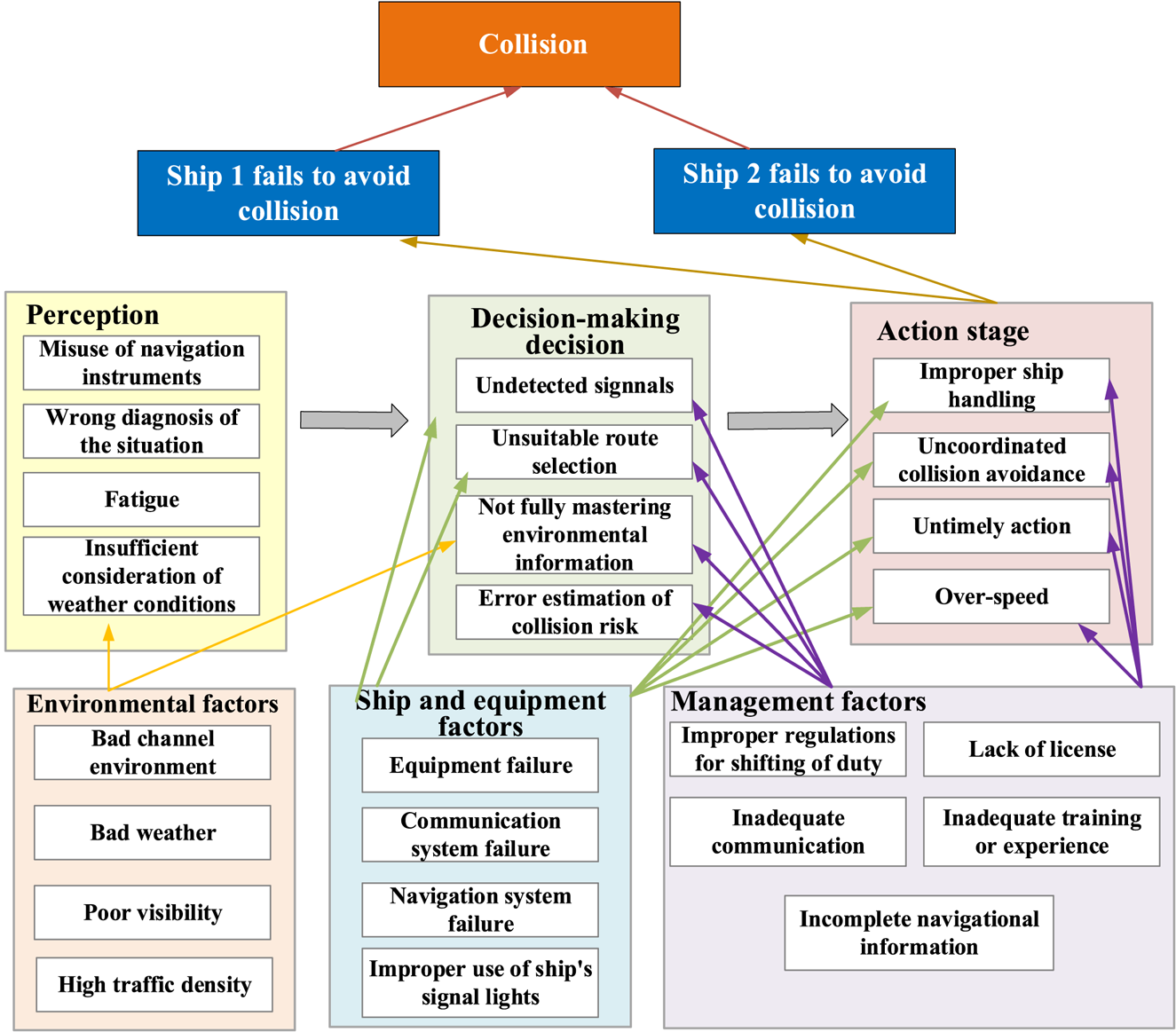
Figure 7. A generic framework for causation probability analysis
3.6 Research gaps and future research directions
Owing to the development of more intelligent vessels, the increasing dangerous cargo transportation and increasing volume of maritime traffic, collision risk estimation and traffic management are the valid measures and practical solutions to reduce ship collision risk. Ship collision risk modelling and prediction considering spatiotemporal movements of multiple vessels have barely been approached to date. There are frequent and risky multi-ship encounters in restricted waters. In such scenarios, a series of interactions among multiple encountered ships make collision risk estimation more complicated. For instance, a ship can simultaneously act as a give-way or stand-on ship. The simplified ship-pair circumstances for multi-ship encounters can be enhanced to image practical scenarios by considering continuous interactions of the ships’ navigation. Ship collision risk estimation and prediction is therefore advanced when the vessels’ behaviour for collision avoidance is taken into account and the quantitative models considering various complex situations are essential to optimise the ship collision risk modelling.
Most of the current research estimate the collision from the perspective of encounter ships. However, determining the whole spatially differential real-time ship collision risk for all the approaching ships is more important for the vessel traffic service management centre. This challenging task is involved in the interaction of encountering ships, mitigation measures the give-way ships take, traffic network and regulations, as well as the real-time efficiency of ship collision risk estimation. Allocating ship collision risk factors to specific contributory conditions is affected by the perception of navigators and environmental conditions, especially for more critical, confined and hostile conditions with high traffic density, narrow channels, and wind, rain and fog (Wennink, Reference Wennink1992). Even though there are certain unsolved issues in ship collision risk estimation, it is believable that the new ideas and research are derived from the old ones. The development of a good and reliable method and system to deal with ship collision risk analysis and prediction to provide a true ship collision risk level for maritime operators is a potential topic for the future, especially with the increasing attention associated with the occurrence of serious accidents, and the emergence of huge vessels and increasing carriage of dangerous products.
4. Major research focuses and developments on ship traffic hotspot detection and prediction
4.1 What are the ship traffic hotspots in restricted waters?
Ship traffic hotspots are the locations or areas with the highest collision probabilities or highly frequent vessel conflicts, rather than the regions with a large amount of traffic. The importance of regional maritime risk has attracted increasingly more attention in multiple ship collision risk estimation and potential conflict hotspots predictions. The detection of high-ship-collision-risk areas (named as hotspots) can help maritime transportation authorities to plan key monitoring regions to ensure safe movement for a huge number of ships.
Historical ship travel data can be applied to figure out the hierarchical geographical distribution for the vessel collision risk in restricted areas to identify the high-ship-collision-risk places (same as precautionary areas). Real-time ship movement data can be employed to predict the following hotspots that are efficient for maritime transportation managers to diffuse the critical ships to cut down high-ship-collision-risk areas. The spatial-temporal ship collision risk maps highlighting changing hotspots provide guidance and bases for the deployment of control actions and implementation of counterpart strategies as parts of disastrous accident prevention and management.
4.2 What is hotspot detection based on historical data analysis?
Historical data-driven high-ship-collision-risk area analysis assumes the locations with the highest collision probabilities (Christian and Kang, Reference Christian and Kang2017; Fang et al., Reference Fang, Yu, Ke, Shaw and Peng2018a) and areas detected with high regional Vessel Collision Risk Operators (Zhang et al., Reference Zhang, Feng, Qi, Shu, Zhang and Wang2019a; Luong et al., Reference Luong, Hwang and Im2021), as well as regions experiencing highly frequent vessel conflicts between different vessels (Wu et al., Reference Wu, Mehta, Zaloom and Craig2016; Rong et al., Reference Rong, Teixeira and Soares2021) termed as ship collision risk hotspots. The methodologies to detect ship collision risk hotspots from historical data comprise the density complexity (Meng et al., Reference Meng, Weng and Li2014; Zhang et al., Reference Zhang, Feng, Qi, Shu, Zhang and Wang2019a), traffic fundamental diagram (Kang et al., Reference Kang, Meng and Liu2018b), spatial clustering method (Liu et al., Reference Liu, Wu and Zheng2019b; Zhen et al., Reference Zhen, Shi, Shao and Liu2021), a tangible analytical approach (Zhang et al., Reference Zhang, Meng and Fwa2019c), etc. These findings can be useful to the operators and managers in maritime traffic surveillance and management to maintain a better understanding of the high-ship-collision-risk area distribution and develop corresponding strategies to enhance navigational safety. These methods can work well for the proposed specific case studies, however, whether they are practical for other research areas is unknown. Because of the diversity of historical data sources, the proposed approach may show inconsistency and lose its advantages in different types of data and exhibit inaccuracy by the bias derived from sample selection. However, the ship collision risk hotspots are static, which may have some contradictions with spatial-temporal changeable traffic patterns along the complex waters.
4.3 What is the real-time ship movement-based collision risk hotspot prediction?
Nowadays, with the emergence of modern automatic vessels and ports, more attention is paid to the real-time ship movement-based collision risk hotspot prediction to further guide safe navigation in ports. The real-time ship movement-based collision risk hotspot prediction works on how to detect the following potential ship collision risk hotpots according to a huge number of real-time ship movements. Recently, the framework combining a spatial clustering process (DBSCAN) and a multi-ship collision risk index model has been proposed to rank vessel collision risk in nearly real-time, and automatically identify high collision risk vessels on the west coast of Sweden (Zhen et al., Reference Zhen, Riveiro and Jin2017). Also, a fuzzy inference system considering spatial traffic patterns and near collision situations illustrates that the density-based spatial clustering and the long short-term memory method can be adopted to make timely optimal decisions in vessel traffic service (Namgung and Kim, Reference Namgung and Kim2021). However, it is neglected that the ships close to the boundaries of clusters may also be risky to the ships inside nearby clusters and have not considered the traffic regulation, maneuverer behaviour and complex encounter situation inside the ports. Furthermore, the diffusion strategy in maritime transport based on the detected ship collision risk hotspots is hard to be implemented in the current research.
4.4 Research gaps and future research directions
Once the important confined shipping water areas are blocked by traffic congestion or an accident, it will bring serious costs for the maritime logistics industry. To ensure the safety and operational efficiency of significant ports in maritime transportation, deep insight into the real-time traffic situation and hotspots prediction is indispensable. The AIS can automatically provide the sailing speed, navigating course, dynamic location and other static messages, and then transmit this information to the nearby base stations with the time interval of several seconds to three minutes (Yu et al., Reference Yu, Fang, Fu, Liu and Chen2021b), which can support fundamental traffic diagram study, real-time hotspots detection, predict congestion and potential collision, and further aid strategies implementation to improve maritime traffic conditions (Fang et al., Reference Fang, Yu, Lu, Feng and Huang2018b; Yu et al., Reference Yu, Fang, Lu, Murray, Zhang, Peng and Chen2019c).
The real-time ship collision risk hotspot detection and prediction should incorporate various information associated with the surrounding environment and navigation situation that provides advice about the needed collision avoidance and path adjustment to reduce collision accidents. How to incorporate the historical hotspots analysis results in effective real-time traffic management will be interesting and attractive. Furthermore, robust technology enables us to predict the locations of ships in advance with high time resolution necessary for real-time prediction. The advanced data collection methods and machine learning technologies not only guarantee the efficiency and reliability of shipping traffic information, but also lead to real-time precisely capturing ship activities and analysing traffic character. Finally, it will be interesting to investigate the optimisation of the ship path and port operation strategy to mitigate the potential following collision hotspots for efficiency and safety purposes.
5. Major research focuses and developments on collision-avoidance-based ship path planning
5.1 What is collision-avoidance-based ship path planning in restricted waters?
In the era of big data science and artificial intelligence, e-navigation, the unmanned ship and the semi-automatic ship have become increasingly more popular under the advanced technologies. Therefore, collision-avoidance-based ship path planning for restricted waters is significant for assessing the effect of the trajectory adjustment actions that a critical ship takes for reducing the ship collision risks. Furthermore, it also can guide the automatic vessels sailing at the safest and most efficient path in confined waters.
Generally, safety acts as the priority in path optimisation, and other aspects such as the economy and fuel efficiency have a lower priority (Tam and Bucknall, Reference Tam and Bucknall2010b). Path planning is to calculate the optimal path connected with the predetermined start and end waypoints that should avoid a collision with obstructions, complying with traffic rules, considering changeable environments, accounting for collision avoidance behaviours and improve the efficiency as much as possible, as well as successfully provide near real-time solutions to ensure the applicability (Ni et al., Reference Ni, Liu, Cai and Wang2018). An appropriate ship path cannot only reduce uncoordinated human operation related accidents by providing navigators with sailing recommendations, but can also enhance the efficiency of traveling through saving fuel consumption and optimising sailing time (Xie et al., Reference Xie, Xue, Zhang, Zhang, Tian and Haugen2019).
5.2 What are the significant differences between the static and dynamic collision-avoidance-based ship path planning problems?
The dynamic collision-avoidance-based ship path planning problems are much more complicated than only considering a stable obstruction because moving vessels may need maneuverer adjustments and strategy changes for collision avoidance. Another reason is that dynamic collision-avoidance-based ship path planning not only needs to be optimised from a global perspective through introducing all the accessible environmental information, but also local adjustment according to the dynamic obstacles. These reasons indicate that increasing the efficiency of solving a more complicated path problem is needed to support a real-time optimal navigation strategy when dynamic collision-avoidance is considered.
The static collision-avoidance-based ship path planning problems ensure the avoidance of a collision with any stable obstacles, such as an island, buoys, shallows, rocks and fishing nets. It can be solved by the traditional algorithms including a spatial structural model, approaches based on raster grids, the line-of-sight method and the potential field approach, as well as artificial intelligence-based algorithms and simulations such as particle swarm, evolutionary, neural networks and fuzzy logic, as stated by Yan et al. (Reference Yan, Zhao, Pan and Inaishi2009), Tsou and Hsueh (Reference Tsou and Hsueh2010), Szłapczyński (Reference Szłapczyński2012), Chen et al. (Reference Chen, Negenborn and Lodewijks2016), Kolendo and Śmierzchalski (Reference Kolendo and Śmierzchalski2016), Deng et al. (Reference Deng, Gan, Zhou, Zheng, Liu and Zhang2017), Hinostroza et al. (Reference Hinostroza, Xu and Guedes Soares2017), Witkowska et al. (Reference Witkowska, Śmierzchalski and Wilczyński2017), Zhou et al. (Reference Zhou, Zhao and Guo2017), Wang et al. (Reference Wang, Zhang, Li and Dong2018b) and Tang et al. (Reference Tang, Yang, Zhao, Li and Hao2019).
The dynamic collision-avoidance-based ship path planning problems comprehensively consider the applicability and safety of the ship's path through introducing the changeable encounter scenarios and changeable environment and adapting to waterways and navigation conditions (Li-Jia and Li-Wen, Reference Li-Jia and Li-Wen2012; Kang et al., Reference Kang, Chen, Zhu, Wang and Xie2018a; Yu et al., Reference Yu, Murray, Fang, Liu, Peng, Solgi and Zhang2021a). The dynamic collision-avoidance-based ship path planning problems are hard to solve by the traditional methods, and are always in need of the artificial intelligence-based algorithm and simulation-driven approaches.
In addition, some path planning problems considering both static and dynamic collision-avoidance are more complex and complicated, and will require a long computation time to obtain useful and reliable results (Smierzchalski, Reference Smierzchalski2000; Xue et al., Reference Xue, Han and Tong2011; Mei and Arshad, Reference Mei and Arshad2015; Kuczkowski and Śmierzchalski, Reference Kuczkowski and Śmierzchalski2017; Lazarowska, Reference Lazarowska2017; Lyu and Yin, Reference Lyu and Yin2017). The recently proposed solving methods such as the multi-behaviour fusion-based potential field method and the new deterministic approach are targeting these problems. The optimal path determination for a vessel in the complex dynamic scenario remains challenging. How the optimisation path for critical ships reversely affects the ship collision risk for encounter ships has rarely been considered in the current research.
5.3 What is the model formalisation for ship path planning?
Path planning in different circumstances can be reduced to the optimisation task with static and dynamic constraints through considering the available manoeuvring region with the determined boundary derived from obstacles and the surrounding moving ships. The area-based static obstructions such as shallow regions and shorelines can be represented as polygons or convex hulls (Smierzchalski, Reference Smierzchalski1999a) and then the ship collision risk is checked through the intersections with the polygon. The moving ships can be represented as the ship domain shape or the occupied grids or circles (Lyu and Yin, Reference Lyu and Yin2019).
In common, the optimisation model should be formulated with the explicit optimisation model with decision variable, objective and constraints for ship movement to support the selection of appropriate approaches to solve these formulated models and further satisfy the purposes of enhancing the automation, improving efficiency, aiding the navigation mission planning and on-board revision to avoid a collision, as well as reduce the ship collision risk (Tam and Bucknall, Reference Tam and Bucknall2013). However, as shown in Table 3, current research simply describes trajectory planning as the determination of a set of waypoints that enable ships to avoid a collision with each other, as well as away from the static obstacles, while keeping the smallest potential deviation from the given path (Lazarowska, Reference Lazarowska2015b). The safety objective can be represented as the turning and speed of the vessel, and the economic objective is associated with the distance of navigation. The navigation areas can be discretised into grids and the trajectory planning is to pick up the optimal adjacent cells by moving the occupying cell in the left, right, up and down directions (Zhu et al., Reference Zhu, Wang and Wen2013). These approaches are implemented from spatial perspectives and will ignore the dynamic movement characteristics of ships, as well as be easily affected by the size of grids.
Table 3. Exemplified formulae for the objective of path optimisation

Usually, the movement environment can be represented as the discrete configuration space that comprises a lot of nodes, such as the initial and end positions, as well as other waypoints. The static obstructions (i.e. land) and other surrounding ships occupied nodes are unavailable for the own ship path. Therefore, the general model for ship path optimisation to avoid a collision with static and moving obstacles and comply with COLREGS for normal encounter situations is illustrated in Table 4. The full implementation of the reactive ship path planning that not only considers the COLREGS and manoeuvrability characteristics but also an emergency is challenging. Ship navigation is a very complicated system and hard to be described through an accurate simple mathematical model. Even though the mathematical model has been proposed, the feasibility and applicability are not easy to ensure.
Table 4. Objective and constraints for general path optimisation

5.4 What methods have been proposed for ship path planning?
There are several methods to solve the path optimisation in the current research that can be categorised as the deterministic, heuristic and hybrid methods. The deterministic methods, including ordinary differential equations (Soltan et al., Reference Soltan, Ashrafiuon and Muske2011), the trajectory-based method (Lazarowska, Reference Lazarowska2016, Reference Lazarowska2017), the policy gradient based deterministic path planning (Xu et al., Reference Xu, Wang, Zhao and Zheng2019) and the artificial potential field method (Mei and Arshad, Reference Mei and Arshad2015; Lazarowska, Reference Lazarowska2018; Fu et al., Reference Fu, Wang and Wang2019; Lyu and Yin, Reference Lyu and Yin2019), use a set of defined rigorous steps to make the feasible solutions converge to the optimal one, and has the advantage of the repeatability of solutions for every run with the same input in the same amount of calculation time due to its deterministic nature. The deterministic methods can obtain a smooth trajectory planning with regular shape obstacles (Soltan et al., Reference Soltan, Ashrafiuon and Muske2011) or dynamic regular obstacles with constant velocity (Lazarowska, Reference Lazarowska2018; Fu et al., Reference Fu, Wang and Wang2019; Lyu and Yin, Reference Lyu and Yin2019; Mei et al., Reference Mei, Arshad and Tang2019), sort all candidate trajectories according to the fitness function to obtain the optimal path (Lazarowska, Reference Lazarowska2016, Reference Lazarowska2017) and make the ship behaviour continuous (Xu et al., Reference Xu, Wang, Zhao and Zheng2019). However, they hypothesised ship movement parameters that are unchangeable and will be time-consuming with the fine-grained candidate trajectories definition, as well as being problematic when it is applied in a complex navigation environment with irregular moving obstacles due to resulting in a trap area with unreachable near obstacles.
The heuristic methods use the guidance information (i.e. collective behaviour and membership function) to narrow the whole search space to the subset one and obtain the optimal solution that meets the design requirements quickly for the complex situation. The heuristic approaches include artificial intelligence algorithms (i.e. neural network (Mohamed-Seghir, Reference Mohamed-Seghir2016; Mohamed-Seghir et al., Reference Mohamed-Seghir, Kula and Kouzou2021), evolutionary algorithm (Szlapczynski and Szlapczynska, Reference Szlapczynski and Szlapczynska2012; Li et al., Reference Li, Wang, Zhao and Xue2019b; Zhang et al., Reference Zhang, Li, Lu and Huang2019b; Mohamed-Seghir et al., Reference Mohamed-Seghir, Kula and Kouzou2021), A*algorithm (Xie et al., Reference Xie, Xue, Zhang, Zhang, Tian and Haugen2019), the particle swarm optimisation (Yujie et al., Reference Yujie, Yu, Yixin, Huajun, Danhong and Yong2018)) and their respective characteristics, as shown in Table 5. Most of the heuristic methods can be applied to solve multi-objective optimisation and maintain parallelism and scalability, but they may have low efficiency, slow convergence, long search time and stagnation that lead to a sub-optimal solution (Xu et al., Reference Xu, Chen, Chen, Zhang and Yu2021). The optimal solution may be the suboptimal path, and the optimal trajectory may consist of multiple course changes that are not compliant with a real evasive manoeuvre and common practice. It attracts increasingly more attention to how the final result derived from the heuristic methods can be reproduced and applied on-board a ship (Lazarowska, Reference Lazarowska2015a; Candeloro et al., Reference Candeloro, Lekkas and Sørensen2017).
Table 5. Characteristics of heuristic methods

The hybrid methods and super-hybrid to some extent can improve the accuracy of the current trajectory planning by introducing other mature technology or heuristics information, as shown in Table 6. The hybrid methods include nonlinear programming (gradient descent + the genetic algorithm (Ni et al., Reference Ni, Liu, Cai and Wang2017), tangent graph (represent obstacles) + the swarm optimisation algorithm (Shen et al., Reference Shen, Wang, Zhao, Tong, Huang, Chen and Zhang2019), A* (global path planning) + artificial potential field (complete obstacle avoidance) (Yu et al., Reference Yu, Deng, Zhao, Wang, Xu, Wang and Shen2019a) and discrete artificial potential field (a collision-free path) + optimisation algorithm (achieve the optimal path). The super-hybrid methods include genetic algorithm + particle swarm optimisation (Zhao et al., Reference Zhao, Wang, Zhang and Wang2021), dynamic optimal control + particle swarm acceleration calculation (Wang et al., Reference Wang, Feng, Wang and Wang2021), dynamic programming + behaviour learning (Yu et al., Reference Yu, Murray, Fang, Liu, Peng, Solgi and Zhang2021a) and artificial neural network + particle swarm optimisation (Yu et al., Reference Yu, Fang, Murray and Peng2021b). Usually, the mixed algorithms show wonderful ability in avoiding a collision with obstacles, reducing distance cost, accomplishing path optimisation in unknown complex scenarios and reducing the sailing time. However, they do not consider the ship manoeuvrability and feedback mechanism among the multiple interacting ships with more complicated collision avoidance actions and emergency actions when the give-way ship cannot change course and speed successfully. Furthermore, the implementation of ship path planning may be computation consuming. For example, the searching space will increase exponentially with the fine-grained definition of environment and the frequent course changes of the give-way ships.
Table 6. Characteristics of hybrid methods

The acceptable solution derived from every scenario in the complex environment considering the uncertainty of both environment and ship behaviour within the low computation time is necessary for the application in the on-board collision avoidance decision-making system in Figure 8.

Figure 8. Heuristics and hybrid methods
5.5 Research gaps and future research directions
The current research proves the ability in solving the ship path planning considering both static and dynamic obstacles and simplified marine traffic rules and dynamic characteristics of vessels (Kaminski and Smierzchalski, Reference Kaminski and Smierzchalski2001; Lu et al., Reference Lu, Kang, Gao and Meng2018). There are still some unsolved challenges as stated as follows. The proposed research only considers some of the criteria and rarely cover all of them, including safe distance, traveling time, sailing speed, turn rate, collision avoidance manoeuvre and changeable environment. The currently proposed methods primarily consider smoothness, distance and accessibility of the ship path but easily ignore the dynamic characteristics such as the interaction of the motion for encounter ships. It is problematic in the application of guiding ship navigation in the implementation of the region of a traffic separation scheme, execution of coastal fishing as well as other activities.
The external environmental factors, including weather conditions, hydrodynamics and visibility, are usually be neglected in path optimisation. The uncoordinated actions of the give-way ship and the effect of wind and currents are potentially involved in a collision. The robustness of the proposed path planning in uncertain sailing strategies and environmental disturbance needs to be further confirmed. It is impossible to get the complete prior information, which indicates the pre-generated approach and reactive method should be combined to take advantage of the advanced accessible information to generate path prior and also can adjust in accordance with the unidentified surrounding information. Recent tendencies are simultaneous quantitative assessment of the ship collision risk, fuel consumption, sailing time, waiting time as well as the anti-collision manoeuvres in reducing the ship collision risk.
6. Conclusions
With the increasing demand for maritime transportation, collisions are the major accidents when ships are navigating in the maritime industry. Once collisions happen, serious economic loss, environmental pollution and even fatality are probable. Particularly for the ships including liquefied petroleum gas (LPG) and liquefied natural gas (LNG), as well as an oil tanker, nuclear ship and chemical tanker, collisions will result in a serious ecological disaster and environmental pollution. As for the authority of restricted waters, they need to gain accurate ship collision risks and provide information on collision risk hotspots, as well as identify critical ships to adjust the path to mitigate the occurrence of an accident.
This study has reviewed the literature on ship collision risk assessment, ship traffic hotspot detection and prediction, and collision-avoidance-based ship path optimisation for restricted waters. Based on this review, the current ship collision risk models can support quantitating collision risk assessment and prediction, while the real-time collision risk estimation incorporating a dynamic navigation environment and uncertain human behaviours is still challenging. The real-time ship movement-based collision risk hotspot prediction has barely been approached to date, which could be an essential future avenue and be meaningful for identifying critical ships and the implementation of ship path optimisation as the diffusion measures to mitigate the possibility of disastrous accidents. The deterministic, heuristic and hybrid methods can solve the static and dynamic collision-avoidance-based ship path planning problems; however, the robustness of the proposed path planning both models and solving the approaches in uncertain sailing strategies and environmental disturbance need to be further confirmed.
The completion of the whole process, including real-time collision risk estimation, risk hotspots detection, collision-avoidance-based path optimisation and critical vessel diffusion, is the key avenue for filling up the current research gap. This requires designing a solid and efficient ship collision risk estimation method to identify critical vessels and predict upcoming hotspots and figure out collision-avoidance-based path optimisation for the critical vessel to finish diffusion, which is meaningful for port authorities to monitor massive vessel movements in busy waters and implementation of counterpart actions to avoid significant accidents. Even though this is a challenging research topic in maritime transportation, it will be helpful to learn from the comprehensive methodologies and technologies from urban transportation.
Funding statement
This work was supported in part by the National Natural Science Foundation of China, No. 42101429; Open Fund of State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University (Grant No. 21S04), Fund of Sanya Science and Education Innovation Park of Wuhan University of Technology (Grant No.2021KF0026), the National Key Research of China, 2018YFC1407404 and 2017YFC1405302.
Competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have occurred to affect the research reported in this paper.














