



An earthquake disaster is destructive and will cause a large number of casualties. Secondary disasters such as aftershocks and mudslides are often caused by earthquakes, making it difficult to deploy disaster medical assistance teams (DMATs). Reference Li, Zhang and Yu1 The main challenges of rescuing survivors after an earthquake include the following: (1) time-consuming survivor location; (2) constrained manpower; and (3) unsafe evacuation of victims. Reference Akbari, Farshad and Asadi-Lari2
To solve these problems, the concept of robotic urban search and rescue (USAR) has been put forward in the past century. A variety of dexterous mobile robots can be deployed to locate victims and transfer them to a safe place in dangerous environments. Theoretical research has been mature in the field of search robotics, including robot motion control systems and path planning algorithms, etc. Reference Zhang, Sun and Tong3,Reference Campbell, Niall O’Mahony and Carvalho4 Over the years, different types of USAR robots have been developed and applied in many real disaster sites. After the 2001 World Trade Center attack, USAR robots participated in rescue tasks. Reference Blackburn, Everett and Laird5 During the 2011 earthquake in Japan, mobile robots carried out the inspection task in damaged buildings. Reference Matsuno, Sato and Kon6 In contrast, there are few cases of robots used for medical rescue after finding survivors. It seems that directly providing medical assistance or autonomously evacuating the wounded is beyond state-of-the-art robotics. This discussion reviews cases where rescue robots have been used and novel studies on robot systems that directly contact the wounded. The purpose is to analyze limitations and discuss future developments.
Urban Search Robots
As a scout for postdisaster rescue work, urban search robots usually perform simple and crucial tasks, including obtaining terrain information and locating survivors in confined spaces and collapsed buildings that are not possible or safe for people to access. It is applicable for search robots to collect dangerous material samples during investigations in chemical factories or warehouses. Although most of the robots discussed below are also called “search-and-rescue robots” in many studies, they do not provide medical assistance to the wounded. In general, search robots do not make physical contact with survivors. Reference Rohmer, Ohno and Yoshida7–Reference Delmerico, Mintchev and Giusti22
The common robotic platform Quince has a deformable crawler structure, which can autonomously adjust to unstructured terrains with the application of semi-autonomous control algorithms. Reference Rohmer, Ohno and Yoshida7 Due to the modular interoperability and extensive hardware and software architecture, the robot is versatile. After the Eastern Japan earthquake in 2011, Quince was modified and deployed to collect information, including radiation levels in the damaged buildings of the Fukushima nuclear power plant. Reference Nagatani, Kiribayashi and Okada8,Reference Nagatani, Kiribayashi and Okada9 NIFTi (Natural Human-Robot Cooperation in Dynamic Environments) deployed multiple types of robots to assess damage to local historical buildings and cultural artifacts in the red area of Mirandola of the Emilia-Romagna region after 2 major earthquakes and several severe aftershocks in northern Italy in 2012. Reference Kruijff, Pirri and Gianni10 Subsequently, the Long-Term Human-Robot Teaming for Disaster Response (TRAD) project inherited the development of the NIFTi project and continued to develop the USAR robot. Reference Kruijff-Korbayová, Colas and Gianni11 In 2016, a TRAD project deployed search robots to provide 3-dimensional textured models of the interior and exterior of 2 severely damaged medieval churches after the 6.2-magnitude earthquake in Amatrice, Italy. Reference Kruijff-Korbayová, Freda and Gianni12 A hyper-redundant serial-linkage snake robot called the Unified Snake was designed by a team at the Carnegie Mellon University Biorobotics Laboratory (Pittsburgh, PA) in 2012. Reference Wright, Buchan and Brown13 The robot consisted of multiple sturdy, closed modules. Each module weighed approximately 0.16 kg and produced a torque output of 1.3 Nm. The team improved the gait control of the robot and added new functions in different modules in further research. Reference Rollinson and Choset14,Reference Rollinson, Bilgen and Brown15 In the wake of the 2017 earthquake, the Biorobotics team assisted Red Cross rescue workers in the USAR efforts in collapsed buildings in Mexico City. Reference Whitman, Zevallos and Travers16 A timeline of the implementation of these urban search robots is shown in Figure 1. Some other robotic platform studies have made progress, but they have no field application experience. Reference Yamada, Hirose and Endo17–Reference Sanfilippo, Helgerud and Stadheim20 In addition to ground robots, unmanned aerial vehicles based on robot vision have provided better options for improving disaster response efficiency, and amphibious robots for amphibious and aerial environments have also had good application prospects over the past few years. Reference Recchiuto and Sgorbissa21,Reference Delmerico, Mintchev and Giusti22
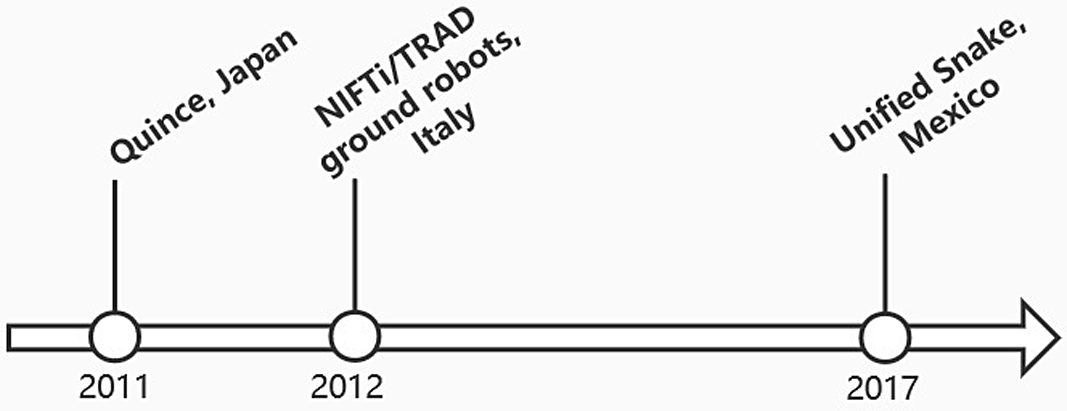
Figure 1. Timeline of implementation of robots.
Field Diagnosis Robots
Once a survivor has been found, the next step is usually to determine their vital signs, and assess to determine if life-saving interventions are indicated and then to extract the patient to begin the safe evacuation and transportation process. Reference Pretto and Barach23 The robot system can be used to assist medical personnel in the initial diagnosis of survivors efficiently at the scene of the injury. The development direction of field diagnosis robots is to integrate them with urban search robots or evacuation robots that will be introduced later. This area is less mature than urban search robots.
For patients with internal hemorrhage, a common injury after an earthquake, rapid screening/triage should be prioritized. Reference Wuthisuthimethawee, Lindquist and Sandler24,Reference Blaivas, Sargsyan and Karakitsos25 FASTele, a wearable tele-echography robot system developed by Ito et al. in 2010, was a solution. Reference Ito, Sugano and Iwata26 The system enabled focused assessment with sonography for trauma (FAST) at the injury site. The robot was attached to the patient’s body, and an echo probe of the robot was placed in a rough position of the FAST area by a bystander. Then, the position was fine-tuned by a doctor remotely. In the experiments with some examinees and doctors, the mechanism was confirmed to be effective. There was no deterioration in the echo images, and a diagnosis was possible even with body movement. The doctor could complete the remote FAST in approximately 6 min. This new diagnosis flow using the robot system did not delay transportation. As a result, the robot system has the potential to improve the survival rate of traumatic shock patients. In addition, it is indicated that FASTele still has FAST performance under vehicle vibration conditions. Reference Ito, Tsuruta and Sugano27 An automatic internal bleeding detection robot system based on ultrasound (US) image processing was constructed to improve the sensitivity. Reference Ito, Sugano and Iwata28,Reference Ito, Sugano and Iwata29 The boundary of the organ (liver and kidney) and internal bleeding were determined using low-brightness set analysis. However, failure of segmentation and detection might occur when the extracted organ area is too small in the image. In the future, the team will improve some methods to enhance the performance of the system and enable the robot to be extended to the diagnosis of all FAST areas. Although FASTele is not a mobile robot, and it takes much more time to attach the robot to the overweight, this robot system is still a notable attempt.
A semiautonomous rough terrain rescue robot named Tehzeeb was presented by Suthakorn et al. Reference Suthakorn, Shah and Jantarajit30 Subsequently, based on the previous research foundation, the team added a victim detection system to the mobile robot platform and proposed a rescue robot named Tele-Operation that can identify victims through heat sensors. Reference Treratanakulchai and Suthakorn31 In 2014, the upgraded robot Tele-Operation IV (Fourth Generation) was deployed to participate in the rescue operation of collapsed buildings in the Pathumthani Province, Thailand. Reference Phuengsuk and Suthakorn32 The robot system was equipped with a camera, microphone, noncontact temperature sensor, and carbon dioxide sensor to analyze victims information.
Evacuation Robots
Generally, DMATs deploy evacuation robots to extricate victims because of the shortage of manpower and the complex situation at earthquake sites. Sometimes 2 different robots are deployed to perform extraction and evacuation tasks. Using robots to extract the wounded involves a complex human-computer interaction process. The most important problem is maintaining the stability of the robot system during rescue and avoiding causing secondary injuries to survivors who were injured.
The Battlefield Extraction Assist Robot (BEAR) manufactured by Vecna® Robotics Inc. (Waltham, MA) is a typical kind of evacuation robot. Reference Theobald33 The mobile robotic platform has an anthropomorphic torso and leg-like deformable track structure. The injured person can be easily lifted from the ground and safely transported through a hydraulically powered articulated arm. The robot evacuation process is effective. The hydraulic system with pressure sensors prevents the extracted patient from secondary injury. As a 2-armed robot, it is suitable for extracting conscious people whose limbs are not severely damaged. However, the neck of the injured person is not supported, and the head is naturally drooping during transportation. Therefore, it is unreliable for BEAR to rescue a survivor who suffers from head trauma.
For fracture injuries, which are the most common in urban earthquakes, Reference Wen, Sun and Shi34–Reference Bar-On, Blumberg and Joshi38 immobilization or fracture support is necessary in the field. The novel tracked rescue robot Semi-Autonomous Victim Extraction Robot (SAVER), designed by a team at the Robotics and Mechatronics Lab at Virginia Tech (Blacksburg, VA), uses a tilted stretcher to load the wounded in the cabin of the robot. Reference Williams, Sebastian and Ben-Tzvi39 After locating and driving up to the survivor autonomously, Reference Sebastian and Ben-Tzvi40 the SAVER can estimate and adjust his posture through the Highly Dexterous Manipulation System (HDMS) manipulator system (developed by RE Reference Akbari, Farshad and Asadi-Lari2 ® Inc.) to make extraction easier. Next, the support system slides down the stretcher and stabilizes the head and neck of the survivor. Reference Sebastian, Williams and Ben-Tzvi41 The injured person is slowly pulled onto the declined stretcher by the shoulder grip system and evacuated to the casualty collection area. SAVER can protect the head and neck of the wounded when handling them, thereby avoiding secondary injuries. Because the remote operator controls the robotic arm to manipulate the injured person, the robot system requires a more intuitive robot-operator interface and lower communication delays to provide real-time feedback.
Crush syndrome (CS) is another leading cause of death for patients in earthquakes. Reference Sahashi, Sahshi and Uchiyama42 DMATs may treat CS but cannot perform dialysis because of the aftershocks. Reference Gibney, Sever and Vanholder43 To solve the safety problem, a rescue robot for evacuating patients with CS has been presented. Reference Sahashi, Sahashi and Uchiyama44 The robot can proceed through narrow spaces and work under rubble with the dual-tiered crawler that runs in adverse directions. Figure 2 shows the crawler system. In addition to the vital sign sensor probe, including a near-infrared camera, infrared LED (light-emitting diode) light, and microphone, the robot is equipped with a crush syndrome prevention system. After the robot removes the rubble, affected parts of survivors are tightened smoothly by a pressure cuff to prevent reperfusion injury. Notably, this method is only a first aid treatment. Then, the victim is picked up in the container inside the robot body and returned to the ground for meticulous treatment. This robot still leaves some drawbacks. First, the robot cannot communicate wirelessly. The robot and the terminal control panel are connected by a 10-meter-long cable wire to transmit data and provide power, which limits the range of movement. Second, the robot needs a cable management assistant while it is working. Beyond the initial report, no further work was performed.
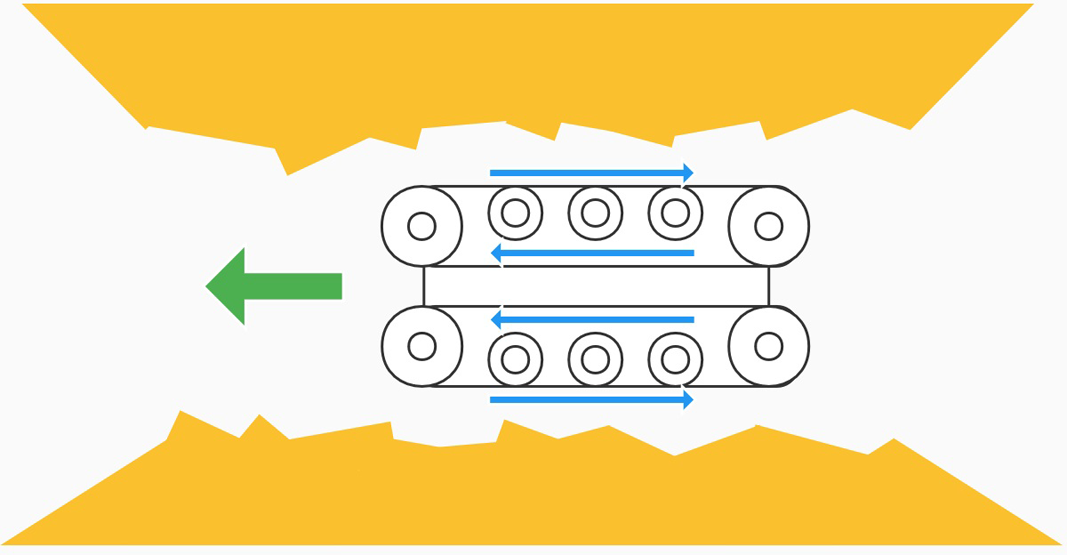
Figure 2. The crawler system of the rescue robot.
Limitations of Deploying Robots for Urban Search and Rescue
The main problems for urban search robots are insufficient information processing capabilities and complex robot operations. The robot operator suffered from cognitive overload in the rescue case of Italy. Reference Kruijff, Pirri and Gianni10 The data given by the robot were not intuitive, which means that much information still needs to be handled by people. A similar problem also appeared in the robot-assisted rescue case in Mexico City in 2017. Reference Whitman, Zevallos and Travers16 As a consequence, the rescue personnel with minimal training could not replace the researcher to control the robot effectively on site. The nonsharing of data between robots is another problem. When multiple robots were working simultaneously, their collaboration performance did not meet expectations.
The most serious challenge for field diagnosis robots and evacuation robots is the safety of the injured in the human-robot interaction. Reference Zacharaki, Kostavelis and Gasteratos45 The robot can easily cause bruising (internal bleeding) on the contact parts of the human body, especially the extremities. Reference Sugiura, Fujikawa and Nishikata46 Almost all evacuation robots mentioned above have only been tested in a simulated environment, but the real postearthquake environment will be much worse. It is still impossible for these robots to ensure absolute safety in tests. According to the results of some studies, victims are more willing to believe in the actions of a robot than a human in an emergency scenario. Reference Robinette, Howard and Wagner47,Reference Nayyar, Zoloty and McFarland48 However, it was proposed that once robot errors occurred, they would lead to the destruction of the human-robot trust relationship, which is disastrous for the rescue robot. Reference Rossi, Dautenhahn and Koay49 Similarly, robot ethics and operational liability also need to be addressed. According to the current law, when rescue robots participate in operations, it is difficult to clarify the responsibilities of all relevant personnel, including technicians, decision-makers, operators, and doctors. Reference Sahashi, Sahashi and Uchiyama44 These factors limit the experiments of evacuation robots in real postearthquake environments.
Determining an appropriate benchmark for urban rescue robots is another issue. The development teams from different countries test their robot systems in different environments, which makes it impossible to compare the results based on their reports. Robot competitions, including the European Land Robot Trail (ELROB), euRathlon, RoboCup Rescue, etc., seem to be the benchmark for robot systems. Reference Schneider and Wildermuth50–Reference Brüggemann, Wildermuth and Schneider53 There are still problems with this kind of competition for USAR robots. The participating teams mainly focus on the following tasks: (1) exploring buildings and mapping Reference Sheh, Schwertfeger and Visser51 ; (2) interacting with facilities in the environment (such as valves) Reference Winfield, Franco and Brueggemann52 ; (3) finding and transporting trapped people (dummies). Reference Brüggemann, Wildermuth and Schneider53 In other words, these competitions focus more on “Search” but not “Rescue.” Most of the participants used the manipulator to grab the dummy and even dragged it with a hook, Reference Brüggemann, Wildermuth and Schneider53 which would not be acceptable in a real-life scenario.
Future Directions
The development of emerging technology provides the probability of improving urban rescue robots. Based on deep learning, big data, and the latest fifth-generation (5G) wireless systems, remote computer-aided diagnosis (CAD) has become a novel direction. In theory, CAD systems will play a significant role in assisting physicians in making objective and effective diagnostic decisions. Reference Yanase and Triantaphyllou54 After dealing with massive clinical data, CAD systems can emulate the diagnostic decision-making process of medical experts in the experiment. Reference Yanase and Triantaphyllou55 Benefitting from a variety of deep learning models, CAD systems use feedback mechanisms to continuously improve their performance. Furthermore, the application of the 5G technique dramatically improves the data transmission rate and reduces the communication delay, which is an important guarantee for real-time telediagnosis. Current practices of telemedicine have been carried out in the clinical environment, including surgical consultations and multidisciplinary trauma care. Reference Kelton, Szulewski and Howes56 However, this field is still in its infancy, and the lack of objective and comprehensive results in the reviewed trials makes it difficult to draw conclusions related to effectiveness. Figure 3 shows a simple conceptual architecture of a rescue robot with a CAD system.

Figure 3. Conceptual architecture of rescue robot with CAD system.
A brain computer interface (BCI) is an innovative form of interaction between humans and machines. In general, BCI takes an electroencephalogram (EEG) signal as input and controls external devices directly. Reference Zhang, Yu and Jiang57 BCI does not rely on any muscle or neuromuscular pathway in communication. Thus, this technology was first used in assistive devices to help paralyzed but conscious patients recover and improve their quality of life. Reference Yadav, Yadav and Veer58 The latest studies show that BCI also has promising prospects in nonmedical applications, such as user-state monitoring and collaborative robots at construction sites. Reference Aricò, Borghini and Di Flumeri59,Reference Liu, Habibnezhad and Jebelli60 The currently tested BCI-based system can control robots with high accuracy. By enhancing robot control and improving safety, BCI-based systems are expected to become a new solution in human-dominated environments.
Conclusions
Reasonable deployment of urban rescue robots in earthquake scenarios can help shorten response-time and transportation-time, thereby decreasing the odds of mortality. Owing to all-terrain adaptability and environmental interaction capabilities, search robots have become an important part of DMATs. Studies of field diagnosis robots and evacuation robots have also shown promising results. Different robots are designed according to medical methods to deal with different injuries, including internal hemorrhage, fractures, CS, etc. However, robot systems that have direct contact with the wounded face the challenge of human-robot interaction security, and their performance in real-life scenarios is unknown. It is still necessary to test rescue robots in a more realistic simulated disaster environment. To meet the requirements of collaboration between multiple robots and human-robot cooperation, improving data sharing capabilities and machine intelligence is 1 of the focuses of future research. Artificial intelligence-based CAD systems and BCI-based control systems are also promising development directions.
Acknowledgments
The views and opinions contained in this report are those of the authors and should not be construed as an official position, policy, or decision of the government.
Conflicts of interest
The authors have no conflicts of interest to declare.
Funding statement
This work is supported by the National Key Research and Development (R&D) Program of China, under program No. 2019YFC1511200.



