



Impact Statement
The condition assessment of underground infrastructures (UIs) is crucial for maintaining their functionality, longevity, and safety. The article synthesizes existing literature through comprehensively comparing both structured and unstructured data acquisition techniques for UI condition assessment qualitatively and quantitively, and evaluating their strengths and limitations. The comparisons highlight that advanced data acquisition methods feature better data accuracy, data reliability, and operational efficiency than traditional ones. While previous works have focused on individual methods, our review is the one of the first to comprehensively compare and analyze these methods within a unified framework, offering new insights into UI condition assessment. A more efficient, accurate, and reliable condition assessment could benefit from the integration of data analytics, data management tools, method integration, and improvement in acquisition methods.
1. Introduction
Underground infrastructure (UI) plays a critical role in supporting urban development, transportation networks, and utilities. The condition assessment of UI is crucial for maintaining the functionality, longevity, efficiency, and safety of subsurface assets such as tunnels, pipelines, and mine shafts. To achieve such an assessment, the acquisition of various data and measurements from UI is essential. Traditional methods of data acquisition often rely on manual inspection and point-based measuring, which are time-consuming, labor-intensive, and prone to human error, and the data volume is rather limited (Jiang et al., Reference Jiang, Zhang and Taniguchi2019), failing to produce higher levels of data quality and accuracy, and larger amounts of data for more efficient, objective, accurate, and reliable UI condition assessment (Wang et al., Reference Wang, Friedman and Li2023b). With increasing complexity and scale of UIs, and ever increasingly stringent and rigorous requirements in UI operation and maintenance, the need for a comprehensive understanding of UI structural health and performance grows. This is based on the collection of large amounts of comprehensive and continuous data, which are essential for effective monitoring, maintenance, and management of UI, enabling the application of more advanced techniques to ensure the reliability and longevity of these critical assets.
To conduct a condition assessment of UI like tunnels, it is necessary to understand the type of data that is needed. Generally, the data that are collected from UI can be broadly categorized into structured and unstructured data (Hu et al., Reference Hu, Liu, Sugumaran, Liu and Du2019). Structured data acquisition involves the collection of organized, quantitative data such as stress, strain, and displacement measurements from UI. Traditionally, there are many techniques that have been used for successful data acquisition, such as precise leveling, total station, strain gauge, tape extensometer, and so forth (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Cheung et al., Reference Cheung, Soga, Bennett, Kobayashi, Amatya and Wright2010; Di Murro, Reference Di Murro2019; Ganguly and Paddington, Reference Ganguly and Paddington2019; Jiang et al., Reference Jiang, Cheng, Zhang, Zhang, Su and Zheng2021). With technological advancement and development, methodologies based on Internet of Things, fiber optics, laser scanning, robotics, and so forth have emerged as advanced and innovative solutions, enabling the collection of bigger amounts of accurate and reliable structured datasets for UI condition assessment (Di Murro, Reference Di Murro2019; Farahani et al., Reference Farahani, Barros, Sousa, Cacciari, Tavares, Futai and Moreira2019; Montero et al., Reference Montero, Menendez, Victores and Balaguer2017; Wang et al., Reference Wang, Shi, Huang, Zhang and Liu2021). Unstructured data acquisition, on the other hand, includes a diverse range of formats such as images, videos, sensor logs, and so forth. Such type of data provides rich, detailed information that structured data might miss. Typically, the collection of unstructured data, like images and videos, relies on camera-based technologies, such as closed-circuit television and unmanned aerial vehicles, which facilitates the generation of new insights into the condition of UIs (Kumar et al., Reference Kumar, Abraham, Jahanshahi, Iseley and Starr2018; Liu et al., Reference Liu, Zhang, Lei, Yang and Wang2023; Zhang et al., Reference Zhang, Hao, Zhang and Li2024). These methods, if integrated with artificial intelligence and machine learning algorithms, can help automate the analysis and assessment of UIs and thus improve the decision-making process for assets management and maintenance (Liu et al., Reference Liu, Lin, Cui, Fan, Xie and Spencer2020b; Spandonidis et al., Reference Spandonidis, Theodoropoulos, Giannopoulos, Galiatsatos and Petsa2022).
However, despite the growing body of research in the field of UI condition assessment, significant gaps remain in the literature. Previous studies have primarily focused on individual data acquisition methods, often in isolation, without considering how these methods can be effectively integrated (Afshani et al., Reference Afshani, Kawakami, Konishi and Akagi2019; Bednarz et al., Reference Bednarz, Popielski, Sieńko, Howiacki and Bednarski2021; Hou et al., Reference Hou, Zhang and Du2024; Kumar et al., Reference Kumar, Abraham, Jahanshahi, Iseley and Starr2018; Zhang et al., Reference Zhang, Hao, Zhang and Li2024). There is a lack of comprehensive comparisons between structured and unstructured data acquisition methods within the context of UI, which limits our understanding of their relative strengths and weaknesses. In addition, the potential for integrating data analytics with advanced methods to enhance the accuracy, reliability, and efficiency of condition assessments has not been fully explored.
This article aims to address these gaps by providing a comprehensive synthesis and analysis of existing literature on both structured and unstructured data acquisition methods for UI condition assessment. This review offers a unique perspective by comparing these methods side by side, evaluating their effectiveness and limitations, which contrasts with prior reviews that typically focus on individual methods in isolation. Furthermore, we critically discuss the role of advanced data management and analytical tools in processing the large volumes of data generated by some methods and in automating the analysis and interpretation of these data, which is an aspect that is often overlooked in earlier works, offering new insights into the future of UI condition assessment. The organization of the article is as follows: Section 2 reviews the acquisition of structured data by various methods, together with a comparison of their advantages, disadvantages, data amount, data quality, and level of automation; Section 3 reviews the acquisition techniques for unstructured data, analyses their pros and cons, and systematically compares their difference in data size, sampling interval, data management, transmission, and processing; and Section 4 presents the discussion, conclusion, and recommendations of this article.
2. Structured data acquisition
2.1. Definition of structured data
Data science commonly defines structured data as tabular-form quantitative data that are highly organized, easily decipherable, and straightforward-to-analyze (Mishra and Misra, Reference Mishra and Misra2017). For condition assessment of UI, structured data encompass organized and standardized information on understanding the performance of such subsurface assets, identifying areas of concern or potential risk, and facilitating the evaluation of their structural health, such as strain, stress, and settlement, serving as the backbone of efficient asset assessment practices and informed maintenance decision-making (Du et al., Reference Du, Du, Xu and He2018). Such structured data of UI, despite its significance in providing essential information, can exhibit uncertainty (due to measuring errors), discreteness (arising from non-continuous monitoring), and poor quality (coming from subjective readings), contributing to inaccurate and inefficient condition assessment. One solution is to use big data analytics (e.g., machine learning) to automatically and accurately analyze and investigate or even predict underground structures’ behavior, whereas the acquisition of big amounts of structured data for such purpose remains challenging because currently most data are obtained through manual site investigations, expensive laboratory tests, time-consuming field monitoring, and so forth (Cremona and Santos, Reference Cremona and Santos2018; Du et al., Reference Du, Du, Xu and He2018). Recent advances in information and communication technologies have enabled the application of some innovative and emerging structured data acquisition methods such as wireless sensor network (WSN), distributed fiber optic sensing (DFOS), terrestrial laser scanning (TLS), and so forth, to acquire larger amounts of structured data at a lower cost of labor and time than previously available (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; De Battista et al., Reference De Battista, Elshafie, Soga, Williamson, Hazelden and Hsu2015; Jia et al., Reference Jia, Zhang and Liu2021). The following subsection focuses on the main methods that are available to acquire structured data in the field of UI condition assessment.
2.2. Acquisition of structured data
Manual acquisition of structured data in UI was and is still commonly adopted for its condition assessment despite being subjective, inaccurate, unreliable, time, and labor-consuming (Loupos et al., Reference Loupos, Doulamis, Stentoumis, Protopapadakis, Makantasis, Doulamis, Amditis, Chrobocinski, Victores, Montero, Menendez, Balaguer, Lopez-Tarazon, Cantero, Navarro, Roncaglia, Belsito, Camarinopoulos, Komodakis and Singh2018a; Zhou et al., Reference Zhou, Xiao, Jiang, Bai and Liu2020). In recent decades, emerging technologies with automatic data collection capability, WSN as an example, have seen increasing applications in underground structures to gather big amounts of structured data such as displacement (Sui et al., Reference Sui, Cheng and Wei2021; Wang et al., Reference Wang, Xu, Qiu, Wang, Ma, Li and Guo2020; Xie and Lu, Reference Xie and Lu2017). In this section, a comprehensive review of the acquisition of structured data through certain manual and automatic techniques is presented.
2.2.1. Data acquisition by traditional methods
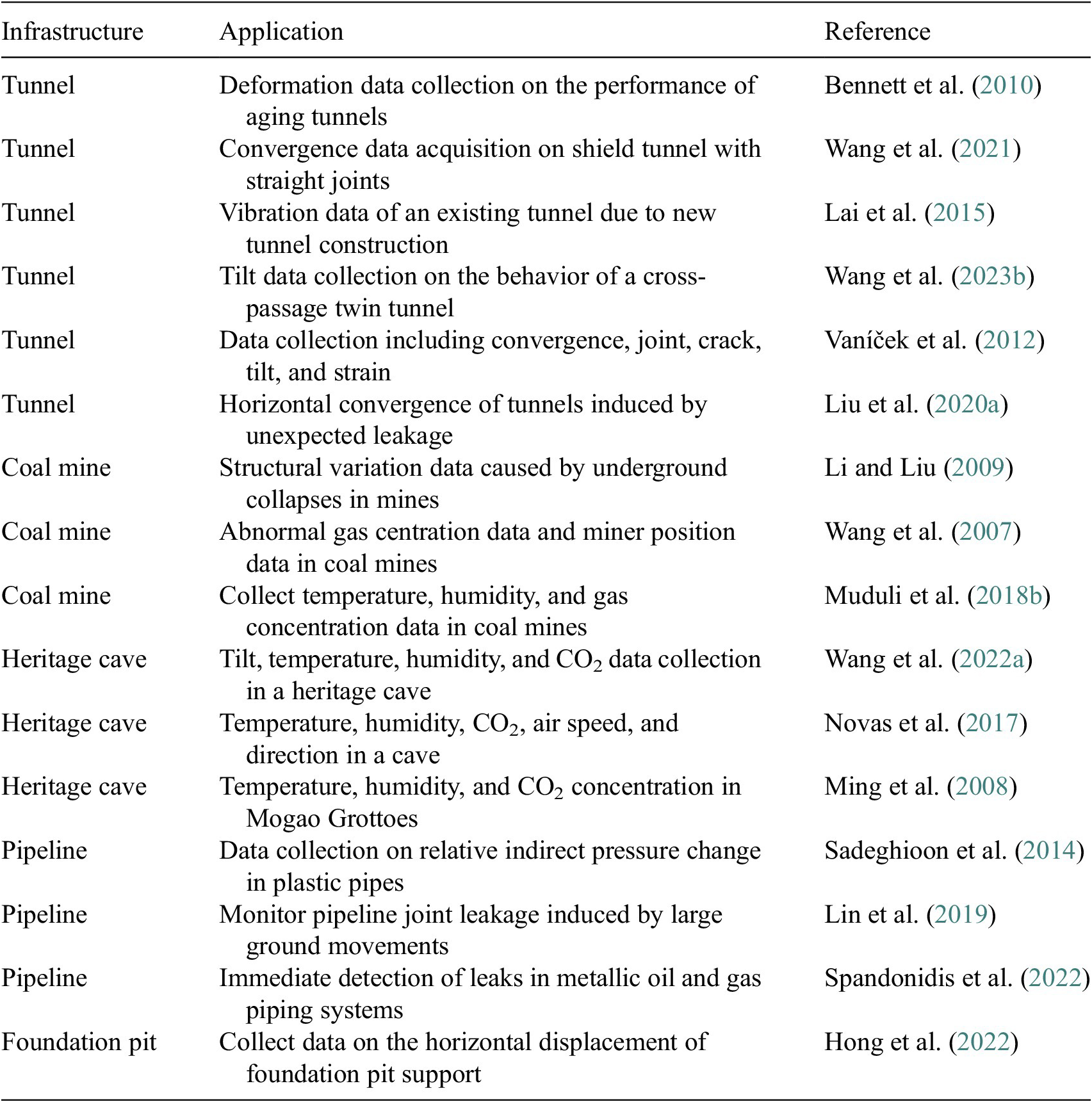
Traditional methods, such as precise leveling, traditional total station, strain gauge, tape extensometer, and so forth, as in Figure 1, have been utilized to gather large amounts of structured information on UI for decades with great success (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Cheung et al., Reference Cheung, Soga, Bennett, Kobayashi, Amatya and Wright2010; Di Murro, Reference Di Murro2019; Ganguly and Paddington, Reference Ganguly and Paddington2019; Jiang et al., Reference Jiang, Cheng, Zhang, Zhang, Su and Zheng2021). Table 1 lists some representative traditional methods, with their applications in gathering structured data for UI condition assessment.
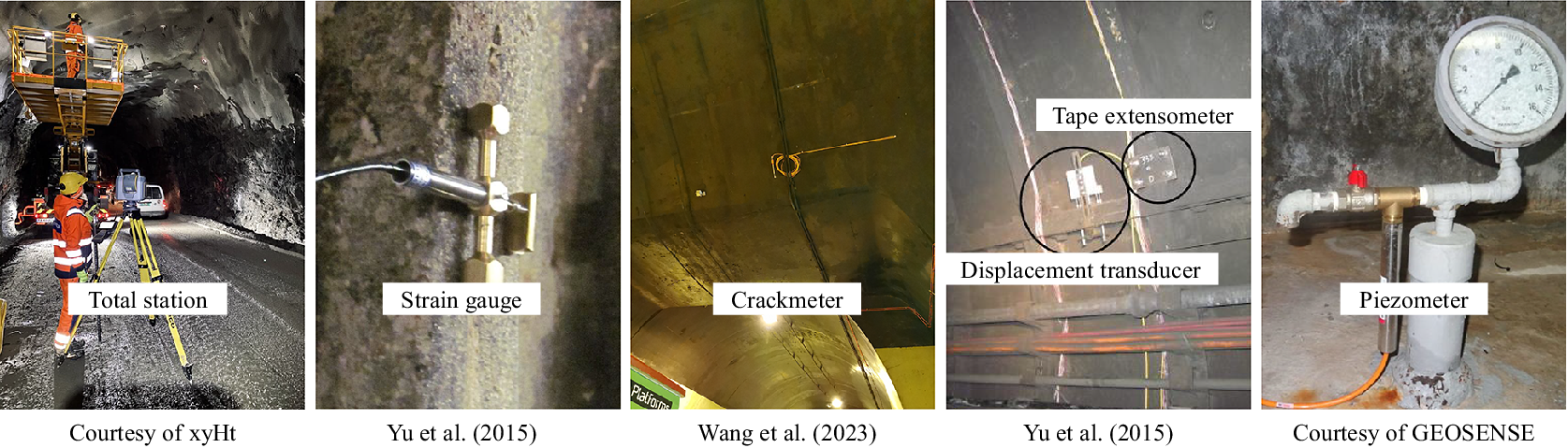
Figure 1. Examples of traditional structured data collection methods.
Table 1. Traditional methods for structured data collection

To understand tunnel performance due to influences such as ground heave and tidal changes, precise levels were adopted to measure its deformation and movement (Burford, Reference Burford1988; Nuttens et al., Reference Nuttens, Stal, De Backer, Schotte, Van Bogaert, Detry and De Wulf2014; Webber, Reference Webber1972). Other methods to acquire structured deformation data of underground structures, such as tunnels, include tape extensometers for 2D deformation monitoring (Bernardo-Sánchez and Arlandi-Rodríguez, Reference Bernardo-Sánchez and Arlandi-Rodríguez2014; Goh and Mair, Reference Goh and Mair2012; Mohamad et al., Reference Mohamad, Soga, Bennett, Mair and Lim2012), displacement transducer for convergence measuring (Shibayama et al., Reference Shibayama, Izawa, Takahashi, Takemura and Kusakabe2010; Xu et al., Reference Xu, Zhao, Liu and Zhu2017), and traditional total stations for 3D liner convergence profiling (Kontogianni and Stiros, Reference Kontogianni and Stiros2005; Luo et al., Reference Luo, Chen, Xi, Zhao, Li, Qiao and Liu2017; Xie and Lu, Reference Xie and Lu2017). In addition, strain gauges, pressure cells, and crack meters are another three traditional methods widely used in UIs to measure strain development (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Nuttens et al., Reference Nuttens, Stal, De Backer, Schotte, Van Bogaert, Detry and De Wulf2014), keep track of crack variation (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Bossi et al., Reference Bossi, Schenato and Marcato2017), monitor stress/pressure evolvement (Clayton et al., Reference Clayton, Berg, Heymann, Bica and Hope2002; Tian et al., Reference Tian, Motalleb Qaytmas, Lu and Du2023) in ground and structures with time. To understand ground behavior, manual methods such as single- or multipoint borehole rod extensometers, magnetic extensometers, precise levels, sliding micrometers, inclinometers, piezometers, pressure cells, and so forth, are also commonly adopted to understand water table change, groundwater pressure evolution, ground displacement, and so forth (Bandini et al., Reference Bandini, Berry and Boldini2015; Bossi et al., Reference Bossi, Schenato and Marcato2017; Chen et al., Reference Chen, Lin and Su2020; Pujades et al., Reference Pujades, Vázquez-Suñé, Culí, Carrera, Ledesma and Jurado2015; Tian et al., Reference Tian, Motalleb Qaytmas, Lu and Du2023; Zhang et al., Reference Zhang, Feng, Li, Deng, Geng and Zhang2022).
The advantages of these traditional methods, such as being reliable and versatile in different conditions, accessible, and cost-effective to different practitioners, have made them very popular and successful in acquiring structured data in UI previously. However, increasingly stringent and rigorous project requirements, for example, less labor involvement, higher accuracy, and real-time and continuous monitoring, have made traditional data acquisition methods unsuitable. Additionally, the point-based nature and heavy reliance on human operators of these traditional methods can no longer satisfy modern data requirements such as higher levels of data quality and accuracy, greater volumes of data, and more comprehensive data types for obtaining a comprehensive picture of UI performance. With technological development and advancement, recent decades have witnessed a wider application of more advanced structured data acquisition systems such as WSN and DFOS in acquiring a larger amount of structured data from underground structures, which is detailed in the following sections.
2.2.2. Data acquisition by automatic methods
Automatic methods typically refer to the ability of technologies or systems to perform monitoring tasks and/or data acquisition processes relatively independently of human intervention. Automatic structured data acquisition systems, based on sensor types, can be broadly categorized into microelectromechanical system sensing (e.g., WSN) (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Li et al., Reference Li, Afshani, Akagi and Oka2020a; Wang et al., Reference Wang, Shi, Huang, Zhang and Liu2021), fiber optic sensing (e.g., DFOS) (Cheung et al., Reference Cheung, Soga, Bennett, Kobayashi, Amatya and Wright2010; Di Murro, Reference Di Murro2019; Li et al., Reference Li, Soga and Kechavarzi2018b; Mohamad et al., Reference Mohamad, Soga, Pellew and Bennett Peter2011; Monsberger et al., Reference Monsberger, Lienhart and Lienhart2017), laser sensing (e.g., TLS) (Farahani et al., Reference Farahani, Barros, Sousa, Cacciari, Tavares, Futai and Moreira2019; Li et al., Reference Li, Liu, Ke, Peng, Ding and Liu2020b; Wang et al., Reference Wang, Zhao, Huang, Vimarlund and Wang2014), and robotics-associated integrated sensing (e.g., robotic total station [RTS]) (Loupos et al., Reference Loupos, Doulamis, Stentoumis, Protopapadakis, Makantasis, Doulamis, Amditis, Chrobocinski, Victores, Montero, Menendez, Balaguer, Lopez, Cantero, Navarro, Roncaglia, Belsito, Camarinopoulos, Komodakis and Singh2018b; Montero et al., Reference Montero, Menendez, Victores and Balaguer2017; Xu and Yang, Reference Xu and Yang2020; Zhou et al., Reference Zhou, Xiao, Jiang, Bai and Liu2020), as demonstrated in Figure 2. This section presents a comprehensive review on those advanced monitoring approaches featuring automatic structured data acquisition that have seen increasing applications and installations in various UIs for their condition assessment (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Ganguly and Paddington, Reference Ganguly and Paddington2019; Kim et al., Reference Kim, Yoo, Kwon and Cho2008; Wang et al., Reference Wang, Xu, Qiu, Wang, Ma, Li and Guo2020).
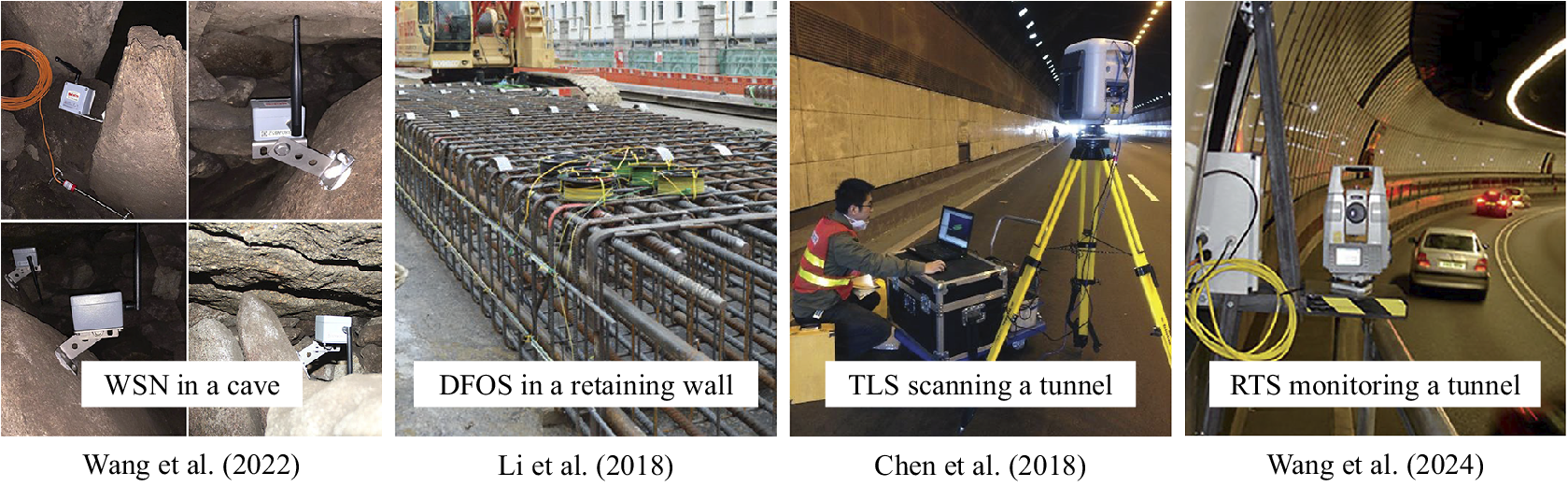
Figure 2. Examples of automatic structured data collection methods.
2.2.2.1. MEMS-based data acquisition
MEMS sensors have been extensively and successfully deployed in various underground structures to acquire a huge amount of structured data, such as inclination, strain, pressure, and temperature (Tariq et al., Reference Tariq, Bakhtawar and Zayed2022; Wang et al., Reference Wang, Xu, Qiu, Wang, Ma, Li and Guo2020). MEMS-based automatic-sensing systems typically involve the integration of MEMS sensors with automated data collection, processing, and transmission system, enabling real-time acquisition of various structured data from UI for condition assessment without the need for human intervention. One representative example of MEMS-based automatic monitoring method is WSN where a network of multifunctional MEMS sensor nodes collects various structured data from UIs or their surroundings and the data collected are then transmitted wirelessly to cloud for processing, as illustrated in Figure 3 for its working principles. Having gained significant popularity in collecting structured data from bridges, such as vibration and displacement, WSN is being gradually applied in various subsurface assets to assess their conditions, exemplified by tunnels (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010; Wang et al., Reference Wang, Shi, Huang, Zhang and Liu2021), mines (Li and Liu, Reference Li and Liu2007; Muduli et al., Reference Muduli, Mishra and Jana2018b), and caves (Wang et al., Reference Wang, Tavares, Fonseca, Soares and Li2022a). Table 2 presents some representative studies on acquiring structured data from UIs using WSN.

Figure 3. Working principle of WSN (Wang et al. (Reference Wang, Tavares, Fonseca, Soares and Li2022a)).
Table 2. Structured data collection using WSN
In tunnels, WSNs were deployed mainly to gather extensive data on structural deformation. For example, WSN sensors were used to acquire the deformation and deterioration data of the Prague metro tunnel such as convergence, joint opening, crack propagation, inclination, and strain due to concerns over postflood tunnel safety (Vaníček et al., Reference Vaníček, Vaníček and Vaníček2012). In London, structured data on cast-iron tunnels including inclination, strain, and joint opening were collected by the WSN system to investigate their aging performance (Bennett et al., Reference Bennett, Kobayashi, Soga and Wright2010) and the response induced by adjacent tunnel excavation (Alhaddad et al., Reference Alhaddad, Wilcock, Gue, Bevan, Stent, Elshafie, Soga, Devriendt, Wright and Waterfall2014). Similarly, Shanghai shield tunnel data were collected by WSN systems from aspects of aging deformation (Xie and Feng, Reference Xie and Feng2012), inclination caused by adjacent construction (Wang et al., Reference Wang, Shi, Huang, Zhang and Liu2021), and tunnel longitudinal settlement/differential settlement (Xie and Feng, Reference Xie and Feng2012; Yin and Huang, Reference Yin and Huang2015). Figure 4 presents the range of deformation development rates recorded in previous studies on tunnels using WSN (Wang et al., Reference Wang, Friedman and Li2023a). In addition, coal mines have also seen applications of WSN sensors to get information on structural variations caused by underground collapses (Li and Liu, Reference Li and Liu2009), under environmental conditions (Muduli et al., Reference Muduli, Mishra and Jana2018b), on gas concentration and liner position (Wang et al., Reference Wang, Zhao, Liang and Tan2007), and on fire and safety hazards (Muduli et al., Reference Muduli, Jana and Mishra2018a). For the assessment of underground caves, WSN sensors have been used to gather structured data mainly on microclimatic conditions, for example, temperature, humidity, CO2 concentration, air speed, and direction (Ming et al., Reference Ming, Yabo, Dongming, Ping and Gang2008; Novas et al., Reference Novas, Gázquez, MacLennan, García, Fernández-Ros and Manzano-Agugliaro2017) and structure inclination (Wang et al., Reference Wang, Tavares, Fonseca, Soares and Li2022a). Other areas of UIs that have seen deployments of WSN systems to acquire structured data include pipeline pressure measuring (Sadeghioon et al., Reference Sadeghioon, Metje, Chapman and Anthony2014), pipeline leakage detection (Lin et al., Reference Lin, Wu, Soga, Wham, Pariya-Ekkasut, Berger and O’Rourke2019; Spandonidis et al., Reference Spandonidis, Theodoropoulos, Giannopoulos, Galiatsatos and Petsa2022), and foundation pit displacement monitoring (Hong et al., Reference Hong, Zhang and Chen2022).

Figure 4. Rate of recorded tunnel deformation acquired by WSN (Wang et al., Reference Wang, Friedman and Li2023a).
Compared to traditional structured data acquisition techniques in Section 2.2.1, MEMS-based wireless sensor networks excel in automatic data collection, wireless data communication, flexible deployment, cable elimination, self-organization, scalability, and real-time data acquisition, saving labor, time and monetary resources. However, its drawbacks such as network signal reliance and network vulnerability, data loss, and point-based measurements somewhat restrict it from obtaining spatially continuous data. In addition, WSNs typically are battery-powered, and replacing or recharging batteries in underground environments can be challenging. Studies have reported that the lifespan of WSN batteries depends on various factors (e.g., type of sensor, frequency of data transmission, and environmental conditions), and generally WSN sensor node batteries can last from several months to a maximum of 2 years when the sampling rate is high (e.g., every few minutes to an hour) and it can last even longer (e.g., up to 5 years) for low-power sensors that sense the environment or structure infrequently (e.g., on a weekly or monthly basis) (Rodenas Herráiz et al., Reference Rodenas Herráiz, Soga, Fidler and De Battista2016). For example, wireless inclinometers in the WSN system reported in Wang et al. (Reference Wang, Friedman and Li2023a) can last up to about 3 years in a single hop network with a sampling rate of every 1 hour in relatively good underground environments, while its matching gateway’s battery can last for around a year. Regarding the communication range of WSNs, it is also influenced by various factors, such as signal frequency, antenna type, environmental conditions, and tunnel configurations, depending on the type of specific wireless technique, the typical communication range of WSNs varies between several meters and several hundred meters. For instance, a maximum of 200 m communication distance in a ZigBee-based WSN was reported in Soga et al. (Reference Soga, Laver and Li2017) when monitoring an underground tunnel section. Section 2.3 summarizes the characteristics of WSN in data acquisition.
2.2.2.2. Distributed fiber optic-based data acquisition
The distributed fiber optic-based data acquisition method features change detection of parameters such as temperature and strain caused by light traveling along a single fiber. The single fiber acts as a sensor with thousands of sensing points, enabling continuous acquisition of structured data in UIs along the entire length of a fiber that may span over tens of kilometers (Sui et al., Reference Sui, Cheng and Wei2021). By realizing spatially and temporally continuous structured data acquisition, the DFOS method has gained increasing applications in acquiring extensive structured data from various UIs for their condition assessment, such as tunnels, pipelines, piles, and diaphragm walls (D-wall). Figure 5 illustrates the DFOS working principle for applications in UI condition assessment.
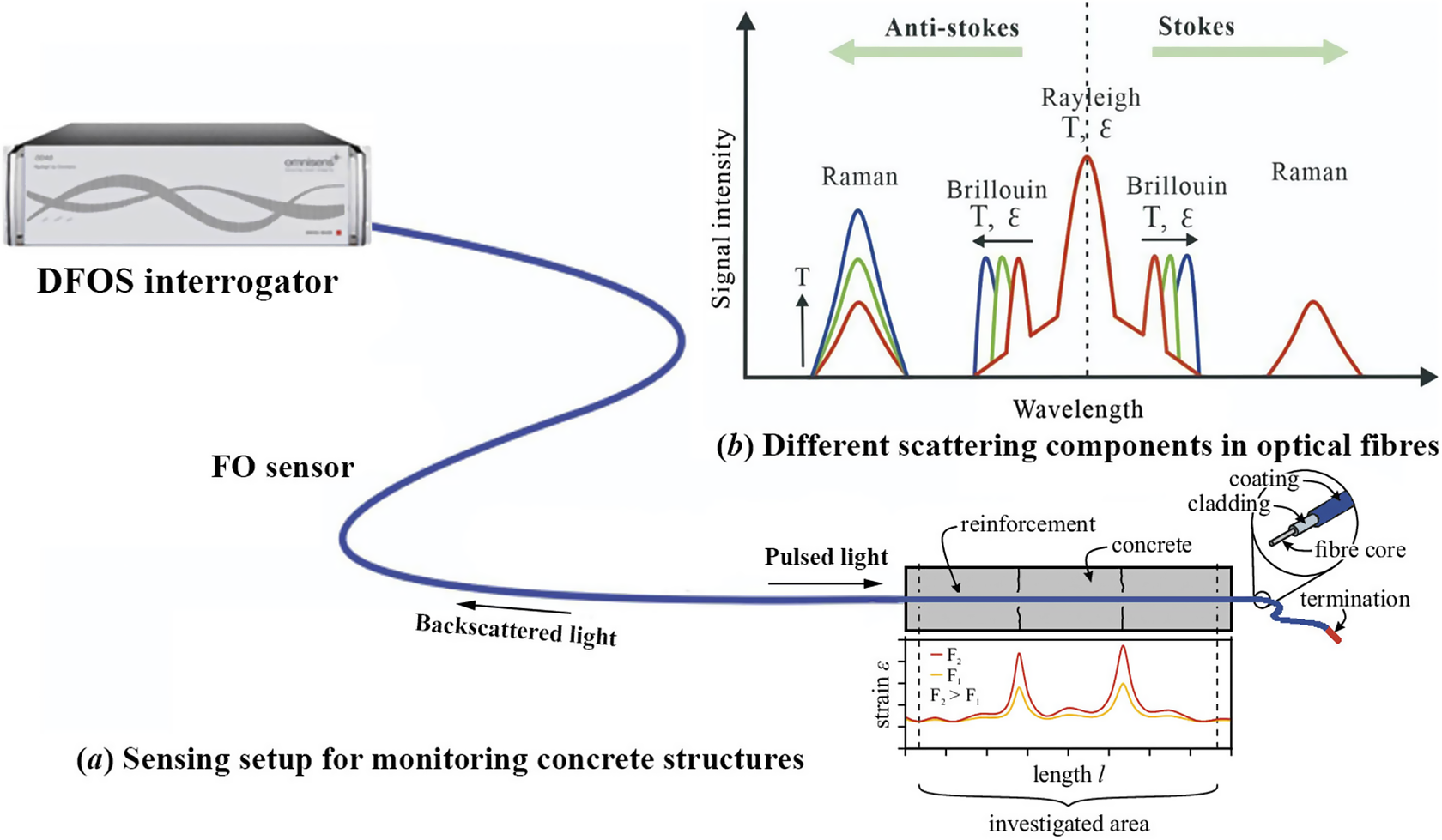
Figure 5. Working principle of DFOS (modified from Monsberger and Lienhart (Reference Monsberger and Lienhart2021)).
DFOS systems have been used to acquire several types of primary structured data, including strain, temperature, vibration, and acoustic events. Each data type leverages different scattering phenomena and interrogation techniques, which allows DFOS to provide comprehensive structured data acquisition solutions across various UIs. Table 3 lists some representative studies regarding DFOS-based data acquisition in different underground structures, and Figure 6 presents some examples of strain measurements of a CERN tunnel acquired by DFOS (Wang et al., Reference Wang, Xiao, Di Murro, Osborne, Friedman and Li2024).
Table 3. DFOS-based data acquisition in different underground structures
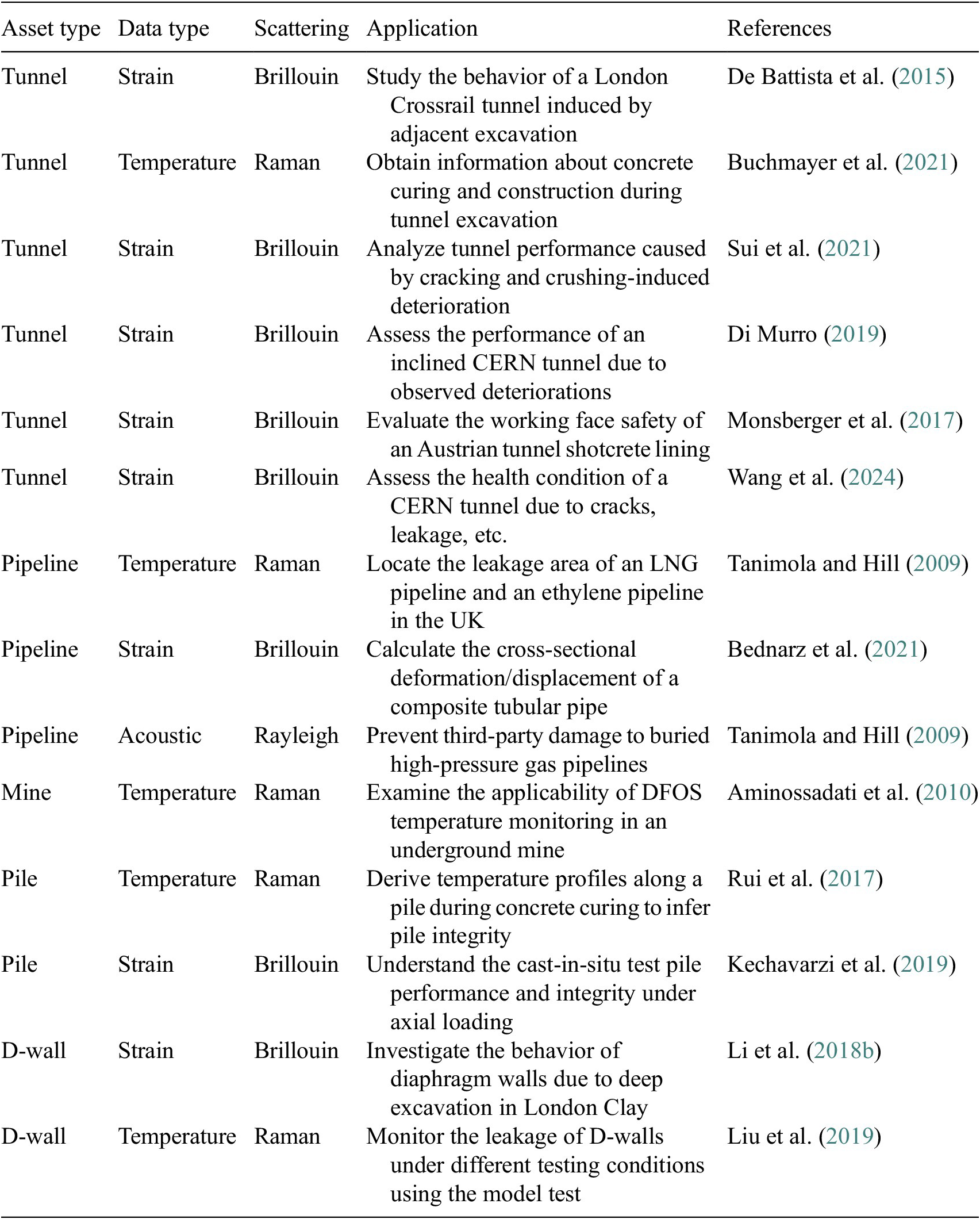

Figure 6. DFOS strain measurements in a CERN tunnel (Wang et al., Reference Wang, Xiao, Di Murro, Osborne, Friedman and Li2024).
It can be seen that DFOS has been widely used for monitoring UI’s strain and temperature. In tunnels, DFOS structured data acquisition mainly concentrates on gathering information on the tunnels during the construction and operation stages. For instance, during construction, structured strains are monitored (1) to analyze the deformation and stress of tunnels during excavation to ensure structural stability, (2) to assess the impact of nearby construction on the tunnel structure, (3) to detect early signs of structural issues like cracking, and (4) to analyze the load distribution in the linings and prevent failures. In some cases, DFOS temperature data are collected to track temperature profiles during concrete curing to ensure their proper setting and prevent thermal cracking. In comparison, during the operation stage, the acquisition of structured strain data dominates due to the concerns over tunnel deterioration, tunnel structural health, maintenance, and repair. Strains are monitored to detect and assess deterioration over time, to identify the development of cracks and other defects that could compromise tunnel safety, and to plan maintenance activities before significant damage occurs. For pipelines, depending on the specific types and purposes, the application scenarios of DFOS in acquiring structured data vary from leak detection and prevention to structural health and ground movement, temperature profiling, third-party interference detection, and corrosion monitoring. Strains are gathered to assess the deformation of pipelines during installation to ensure that they are not overstressed and to detect any changes caused by ground movements like earthquakes that might threaten pipeline integrity. Temperature data are collected to enable leakage detection and localization in pipelines such as LNG and ethylene ones. Acoustic measurements are mainly acquired to facilitate the detection of leaks, third-party interference, and flow monitoring. For foundations and their supporting structures, such as piles and diaphragm walls, both strain and temperature datasets are important parameters for understanding their structural performance and integrity. Temperature profiling ensures the proper setting of pile concrete to avoid integrity problems, while strain data enables the assessment of pile’s long-term structural health. Similarly, D-wall strain data help understand its structural behavior in both the short and long term, while temperature measurements facilitate the detection of leakage of water through the wall.
Like WSN, DFOS enables real-time and automatic structured data acquisition without direct access to underground structures. However, DFOS stands out by not relying on discrete sensors at specific points. Instead, it uses the optic fiber cable itself to measure parameters such as strain, temperature, and acoustic events along extensive sections of UIs like tunnels. Typically, the DFOS system can have a cable length that can be effectively read by an interrogator from several to tens of kilometers, depending on various factors, such as scattering type, fiber signal attenuation, spatial resolution, tunnel curvatures, interrogator power, and sensitivity. For example, the distance range of distributed Brillouin sensing can reach 150 km with 2-m spatial resolution and 1 °C temperature resolution under optimal conditions (Bao and Chen, Reference Bao and Chen2012). Regarding DFOS accuracy, based on the parameter being measured and the scattering type employed, DFOS systems may have different accuracies. For instance, the Brillouin-based DFOS system, commonly used for temperature and strain monitoring, can achieve an accuracy of ±20 με for strain measurement and ±1 °C for temperature. Raman-based systems, primarily used for temperature sensing, typically offer an accuracy of ±0.1 °C. This DFOS approach allows for continuous spatial and temporal structured data collection, providing a higher volume of information for a more comprehensive assessment and evaluation of UI (Buchmayer et al., Reference Buchmayer, Monsberger and Lienhart2021).
2.2.2.3. Laser sensor-based data acquisition
LiDAR-based TLS is one representative laser sensor-based structured data acquisition technique. The advantages of acquiring high-accuracy and high-precision 3D point density, spatial resolution from a single setup in a short time, remote and noncontact operation, adaptability to various underground environments such as tunnels and mines, have gained increasing attention in structured data acquisition from UIs (Mukupa et al., Reference Mukupa, Roberts, Hancock and Al-Manasir2017; Wang et al., Reference Wang, Zhao, Huang, Vimarlund and Wang2014), exemplified by the increasing applications of TLS in geometry detection, deformation monitoring, and feature extraction of UIs (Wang et al., Reference Wang, Zhao, Huang, Vimarlund and Wang2014). The following Figure 7 illustrates the general working procedures of data acquisition using TLS in UIs.

Figure 7. TLS working procedures for UI structured data acquisition.
To gather information on UI geometrical dimensions, previous studies mainly focused on utilizing TLS to obtain tunnels’ geometry profile data to ensure tunnel construction quality control (Wang et al., Reference Wang, Zhao, Huang, Vimarlund and Wang2014), to assess tunnel conditions (Farahani et al., Reference Farahani, Barros, Sousa, Cacciari, Tavares, Futai and Moreira2019), and to monitor the progress of works and supervise tunnel deformations during construction (Argüelles-Fraga et al., Reference Argüelles-Fraga, Ordóñez, García-Cortés and Roca-Pardiñas2013). In addition, TLS has also been used to gather UI’s deformation data, such as tunnel excavation face displacement (Lemy et al., Reference Lemy, Yong and Schulz2006), aging deformation of operation tunnels (Farahani et al., Reference Farahani, Barros, Sousa, Cacciari, Tavares, Futai and Moreira2019; Jia et al., Reference Jia, Zhang and Liu2021; Xie and Lu, Reference Xie and Lu2017), underground pipeline deformation (Vezočnik et al., Reference Vezočnik, Ambrožič, Sterle, Bilban, Pfeifer and Stopar2009), and so forth Figure 8 shows an example of tunnel convergence deformation at different construction stages of a Shanghai metro tunnel acquired by TLS. In terms of feature extraction, TLS has mainly been used to collect measurements of tunnel invasion detection (Yang et al., Reference Yang, He, Xu, Wei and Wang2021), underground mine rock mass discontinuities (Chen et al., Reference Chen, Walske and Davies2018), and rock bolt position (Gallwey et al., Reference Gallwey, Eyre and Coggan2021).

Figure 8. TLS convergence at different construction stages of a tunnel (Xie and Lu, Reference Xie and Lu2017).
LiDAR-based TLS complements discrete point-based monitoring techniques (e.g., traditional methods and WSN) by obtaining structured data from numerous points on various UIs, and spatially continuous methods (e.g., DFOS) by gathering bigger amounts of structured data in continuous 3D spaces of certain length via a single reading. Additionally, TLS provides highly accurate and precise 3D measurements of comprehensive UI areas promptly. However, it cannot replace these approaches as all techniques do not compete but support each other (Mukupa et al., Reference Mukupa, Roberts, Hancock and Al-Manasir2017). For example, TLS may not achieve real-time measurements as WSN does, while DFOS may not gather as much data as TLS can do in one scan.
2.2.2.4. Robotics-involved integrated data acquisition
The automatic structured data acquisition methods presented in previous subsections still have a certain level of reliance on human intervention, prompting the pursuit of even higher levels of automation in the data acquisition process and postmonitoring data processing. One potentially emerging solution is the integration of robotics, computer/machine vision, and artificial intelligence into those widely applied structured data acquisition techniques. Recent years have witnessed some examples/proposals of such robotics-involved integrated methods (Loupos et al., Reference Loupos, Doulamis, Stentoumis, Protopapadakis, Makantasis, Doulamis, Amditis, Chrobocinski, Victores, Montero, Menendez, Balaguer, Lopez-Tarazon, Cantero, Navarro, Roncaglia, Belsito, Camarinopoulos, Komodakis and Singh2018a; Xu and Yang, Reference Xu and Yang2020; Zhou et al., Reference Zhou, Xiao, Jiang, Bai and Liu2020), but they are still in their infancy with no practical and realistic applications in the wider UI industry. This subsection reviews some of these autonomous methods for potential applications in future big data acquisition in UIs. Figure 9 presents the robotics-involved integrated systems for structured data acquisition from previous studies.

Figure 9. Robotics-involved integrated systems for structured data acquisition.
Zhou et al. (Reference Zhou, Xiao, Jiang, Bai and Liu2020) reported the use of an RTS with capabilities such as automatic target recognition, power search, and automatic and remote wireless data collection in a metro tunnel to gather tunnel lining deformation. However, a large number of RTSs may be needed to establish a complete deformation profile of a tunnel due to its short range. Xu and Yang (Reference Xu and Yang2020) proposed the use of artificial intelligence (AI)-assisted TLS to gather geometric information about tunnel structures to obtain tunnel deformation. Another robotics-involved integrated system to gather structured data is the autonomous robotic tunnel monitoring system ROBO-SPECT (Montero et al., Reference Montero, Menendez, Victores and Balaguer2017). It has multiple capabilities such as autonomous navigation of the equipment, automatic identification of tunnel defects, autonomous crack measurement taking and transverse deformation monitoring, autonomous data processing, and decision-making (Loupos et al., Reference Loupos, Doulamis, Stentoumis, Protopapadakis, Makantasis, Doulamis, Amditis, Chrobocinski, Victores, Montero, Menendez, Balaguer, Lopez, Cantero, Navarro, Roncaglia, Belsito, Camarinopoulos, Komodakis and Singh2018b; Menendez et al., Reference Menendez, Victores, Montero, Martínez and Balaguer2018; Montero et al., Reference Montero, Menendez, Victores and Balaguer2017). The ROBO-SPECT system enables automation in not only data acquisition but also the work before, during, and after the acquisition of structured data. Similarly, another two studies on inspection of CERN tunnel structures demonstrated the autonomous capabilities in conducting monitoring, acquiring both structured data and unstructured data, transmitting data and postprocessing data: (1) a remote and automated tunnel crack monitoring system, characterized by remote and automatic data acquisition, storage, and transmission by CERNbot and deep-learning-based automatic crack segmentation and density and distribution prediction, was used to identify tunnel areas with severe crack damage (Ouyang et al., Reference Ouyang, Di Murro, Cull, Cunningham, Osborne and Li2023); (2) a train inspection monorail (TIM) was installed in the large hadron collider (LHC) tunnel at CERN, together with an automatic computer vision system (TInspect), to acquire various structured and unstructured data with mounted sensors and cameras without manual intervention, aiming to monitor changes on tunnel linings such as cracks, leakage, and so forth (Attard et al., Reference Attard, Debono, Valentino and Di Castro2018b).
Such robotic data acquisition systems provide an even higher level of automation compared to previous techniques, although their development incurs additional costs in terms of labor, time, and monetary resources. Additionally, many robotics-involved integrated data acquisition systems laid more focus on image data acquisition for UI surface inspection, followed by AI-enabled image processing for further data analyses/UI condition assessment. These systems offer a feasible and promising direction for future research and development in the field of data acquisition in UI.
2.3. Comparison of structured data acquisition
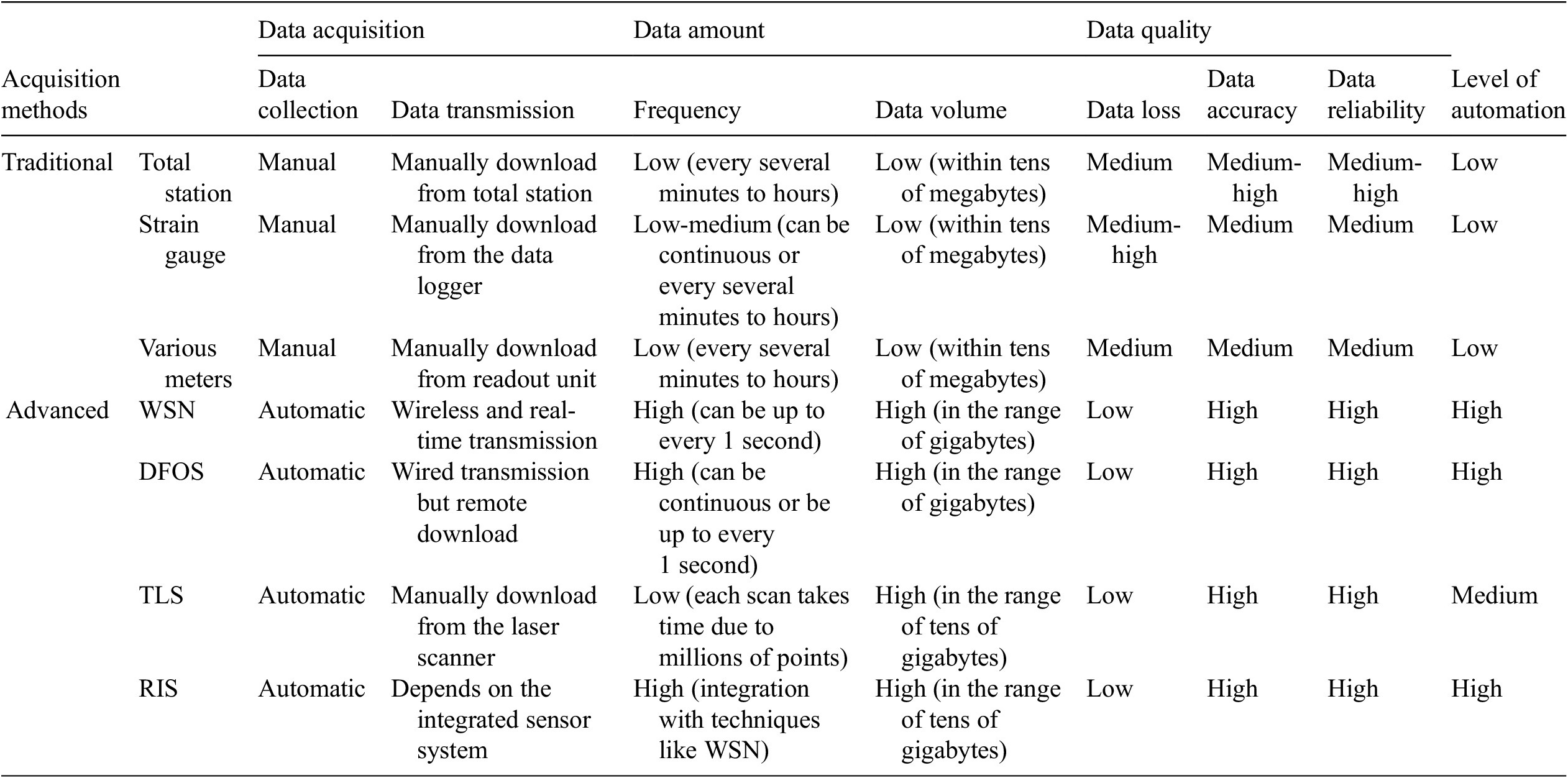
In Section 2.2, a comprehensive review on the widely used techniques for acquiring structured data in UI is presented. It is necessary to understand their similarities and differences in data acquisition for the reference of engineers, researchers, and so forth, in terms of infrastructure condition assessment. Table 4 gives a detailed comparison among the listed data acquisition methods from three aspects of structured data: data acquisition, data amount, and data quality. It is noted that traditional structured data acquisition methods can only obtain relatively low volumes of data due to low sampling frequency, manual collection and transmission, whereas more advanced and automatic methods can gather relatively larger volumes of data due to automatic data collection and high and/or continuous sampling frequency or comprehensive monitoring. For example, traditional total stations, typically with a sampling frequency in the range of 0.01 to 0.1 Hz (once every 10s–100 s) depending on the manual operation and the specific type of instrument used, can produce a data volume from a few megabytes to tens of megabytes per day, depending on the number of sensors and measurement frequency. Upon comparison, more advanced methods such as DFOS (e.g., with a sampling interval as frequent as 1 second) is able to generate gigabytes of data per day and TLS can produce tens of hundreds of millions of points per scan, resulting in data volumes that can exceed gigabytes per session. The quality of structured data obtained by traditional methods remains largely low to medium due to factors such as subjectivity in data reading, environmental effects such as temperature, signal interference, human error, instrument sensitivity, and so forth, compared to the relatively higher data quality by advanced methods. Regarding the level of automation, it is commonly accepted that traditional methods are characterized by heavy reliance on human involvement, including manual installation and calibration, manual operation and data collection, while the more advanced techniques for structured data acquisition in UIs minimize human intervention, thus enabling a medium-high level of automation and the subsequent improvement in data acquisition efficiency, accuracy, quality, and comprehensiveness.
Table 4. Comparison of structured data acquisition
Note:
1. Only three representative methods (e.g., total station, strain gauge, and various meters) in the traditional category are listed for comparison.
2. WSN—Wireless Sensor Network; DFOS—Distributed Fiber Optic Sensing; TLS—Terrestrial Laser Scanning; RIS—Robotic Integrated System.
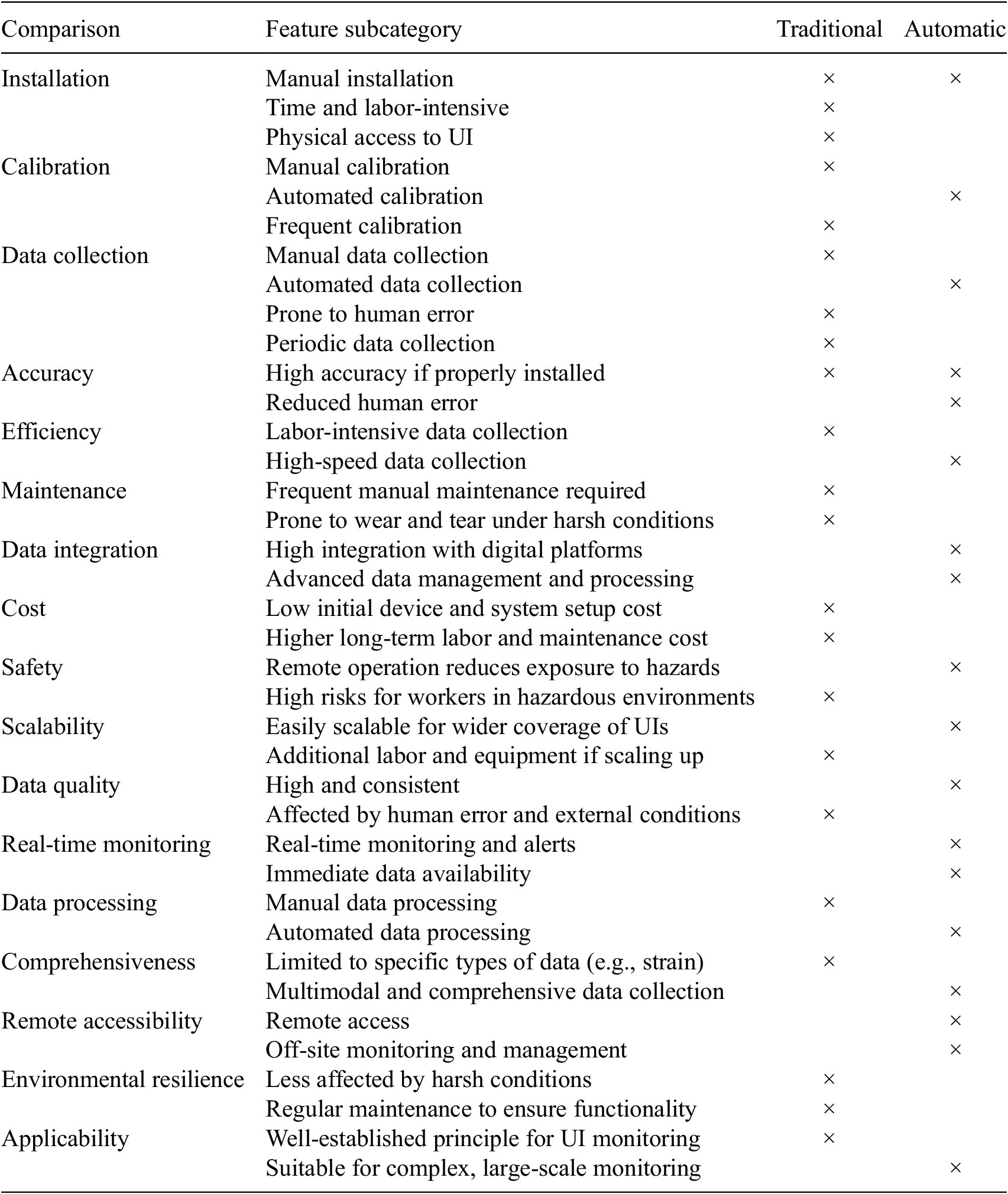
Table 5 compares the advantages and disadvantages of traditional and automatic methods in general in various aspects, from installation and calibration to environmental scalability and system applicability. It can be seen that traditional methods such as total stations, strain gauges, crack meters, and so forth require manual installation, calibration, and data collection, making them labor-intensive, time-consuming, and prone to human error. These methods also involve higher risks for workers and frequent maintenance. While they are often lower in initial cost and well-suited for straightforward monitoring tasks, they often lack real-time capabilities and scalability. On the other hand, advanced methods such as WSN-, DFOS-, and LiDAR-based scanning offer automated data collection, real-time monitoring, and higher accuracy with reduced human intervention. These systems are more efficient, scalable, and safer, although they require a higher initial investment and specialized technical expertise. Those advanced methods are ideal for comprehensive, large-scale monitoring and facilitate predictive maintenance, but their complexity and maintenance needs may be a disadvantage in some scenarios.
Table 5. Advantages and disadvantages of traditional and automatic methods
3. Unstructured data acquisition
3.1. Definition of unstructured data
Unstructured data usually refers to information that does not possess a predefined format or organization, commonly originating from diverse sources. This type of data is particularly challenging to process and analyze due to its lack of structure, and unlike easy-to-use structured data, it can manifest in forms such as text files (e.g., documents, emails, and webpages), multimedia files (e.g., images, videos, and audios), sensor data (e.g., logs, signals, and data streams), and social media data (e.g., tweets and comments) (Gandomi and Haider, Reference Gandomi and Haider2015). Within the context of UI, this typically involves the acquisition of data from sources such as geospatial surveying, maintenance logs and reports, historical records, images, and videos. For the condition assessment of UIs, multimedia data such as images and videos taken during inspection or construction are particularly important to enhance a comprehensive understanding of UI’s structural health and behavior, as they may contain richer information than that of structured data and capture details that structured data may miss. However, the large volumes of unstructured data acquired from UIs pose challenges for data management, analysis, and interpretation, meaning that robust data management solutions, advanced tools, and/or techniques such as high-quality cameras, image recognition, and machine learning algorithms are needed for efficient, effective, and accurate UI condition assessment. The acquisition of unstructured data in the context of UI condition assessment (i.e., with a focus on images and videos in this article) involves the use of approaches such as ground-penetrating radar (GPR), closed-circuit television (CCTV), unmanned aerial vehicle (UAV), and infrared thermography (IRT). The integration of these methods with artificial intelligence and autonomous platforms has gained increased attention in recent years, positioning unstructured data acquisition and analysis as a prominent area of UI condition assessment research (Hsieh and Tsai, Reference Hsieh and Tsai2020; Koch et al., Reference Koch, Georgieva, Kasireddy, Akinci and Fieguth2015; Menendez et al., Reference Menendez, Victores, Montero, Martínez and Balaguer2018). However, the reliance of these technologies on environmental conditions (e.g., light, moisture), UI accessibility, and mobility (e.g., confined space) also poses some challenges to the acquisition and analyses of unstructured data. The following subsections review the main methods that are available to acquire big amounts of unstructured data in the field of UI condition assessment and then compare their advantages and disadvantages in acquiring unstructured image and video data.
3.2. Acquisition of unstructured data
Acquiring unstructured data relies on monitoring methods/techniques that extract feature information pertinent to structural health by analyzing images and/or videos to identify and evaluate changes. These methods predominantly utilize computer vision technology and image or video processing algorithms, offering the benefits of noninvasive and remote monitoring capabilities. The following subsections review some representative technologies that have been utilized to acquire unstructured data.
3.2.1. Ground-penetrating radar
GPR is a nondestructive testing method that employs radar signals to visualize subsurface structures. It is effective for detecting UI, assessing its condition, and identifying potential issues like voids or structural damages. Due to the varying dielectric properties of different materials, the captured signals of reflected waves are processed to construct an image or profile of the subsurface, which enables the identification of the location, depth, and size of any anomalies or structures beneath the surface, such as tunnel, voids, or other structural features. Figure 10 illustrates the working principle of GPR in detecting utility pipes as an example.

Figure 10. Working principle of GPR in underground utility pipes.
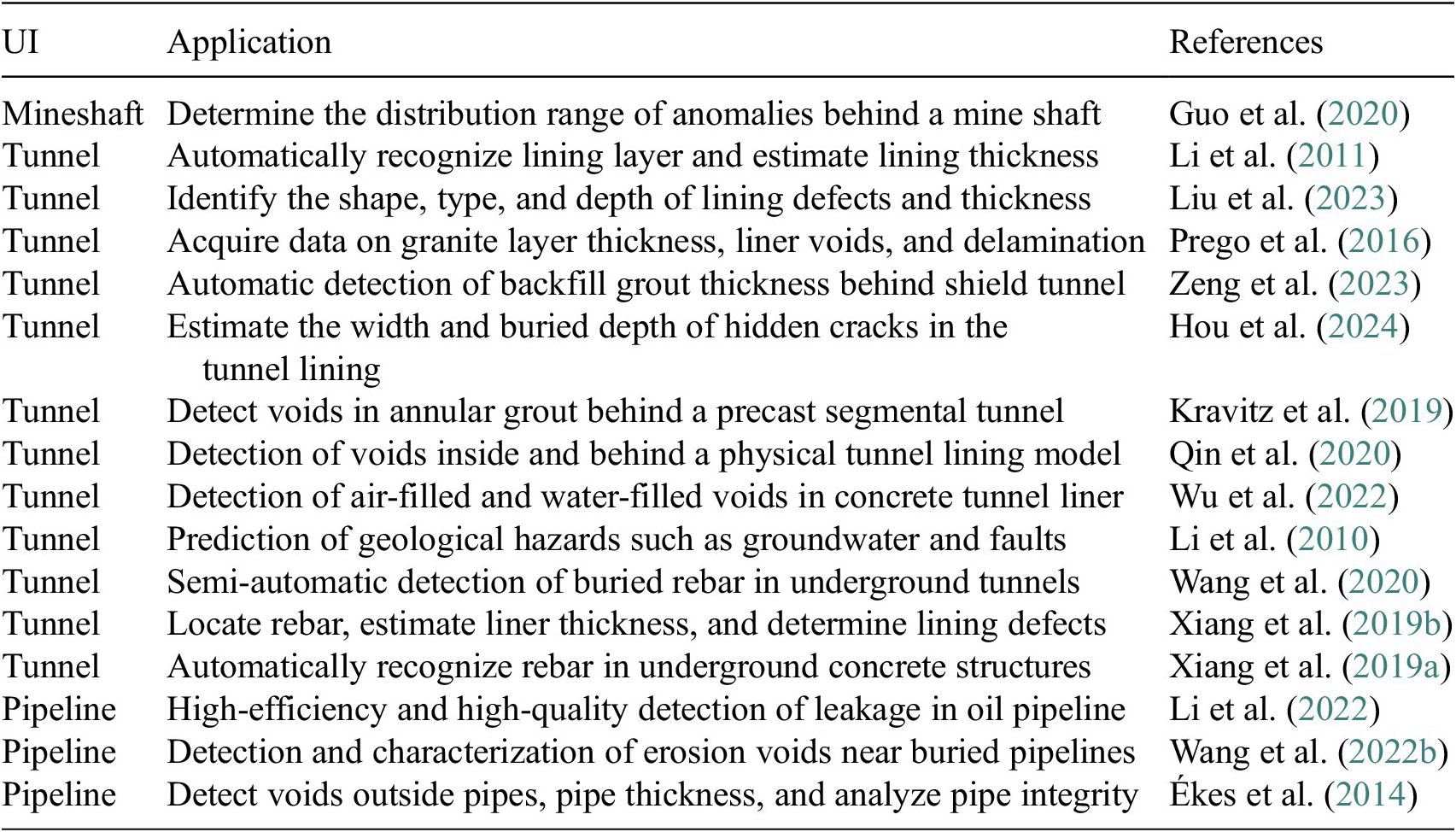
GPR has been successfully and extensively employed in various UI scenarios with different purposes, including estimating the thickness of concrete liners and grouting layers (Guo et al., Reference Guo, Zhu, Qian and Liu2020; Li et al., Reference Li, Li, Zhao, Liu, Wan, Xu, Xu, Chen and Wang2011; Liu et al., Reference Liu, Zhang, Lei, Yang and Wang2023; Prego et al., Reference Prego, Solla, Núñez-Nieto and Arias2016; Zeng et al., Reference Zeng, Zhang, Xie, Zhou, Xu and Lambot2023; Zhang et al., Reference Zhang, Xie and Huang2010), identifying defects in tunnel lining such as voids and cracks (Hou et al., Reference Hou, Zhang and Du2024; Kravitz et al., Reference Kravitz, Mooney, Karlovsek, Danielson and Hedayat2019; Qin et al., Reference Qin, Xie, Tang and Wang2020; Wu et al., Reference Wu, Bao, Shen, Chen and Cui2022). In addition, GPR has also been applied to detect and identify geological features such as water seepage (Li et al., Reference Li, Li, Zhang, Xue, Liu, Su, Wang and Wang2010), to check rebar cover and location (Wang et al., Reference Wang, Xu, Qiu, Wang, Ma, Li and Guo2020; Xiang et al., Reference Xiang, Rashidi and Ou2019a; Xiang et al., Reference Xiang, Rashidi and Ou Ge2019b), to detect leakage, voids, thickness of pipelines, and to analyze their integrity (Ékes et al., Reference Ékes, Takacs and Neducza2014; Li et al., Reference Li, Yang, Guo, Ji, Jin, Sun and Zhao2022; Wang et al., Reference Wang, Li and Li2022b). Table 6 presents some representative studies on the acquisition of image data for UI condition assessment.
Table 6. GPR-based image data acquisition for different UI condition assessments
Acquiring GPR images serves as the first significant step toward successful UI condition assessment and analyses. Following that, the interpretation of GPR image information is a crucial step in utilizing the data effectively, and it can be difficult owing to the complex reflection patterns (ringing noise and diffractions) and the interactions with different subsurface materials. Traditional GPR interpretation primarily depends on experienced professional technicians, which is time-intensive and subjective (Liu et al., Reference Liu, Zhang, Lei, Yang and Wang2023; Yue et al., Reference Yue, Liu, Lin, Meng, Liu, Zhang, Cui and Du2024). In recent years, machine learning and deep learning, with their powerful self-learning and data mining capabilities, have gradually been applied to the intelligent recognition of GPR profiles of various UIs like tunnel lining. For example, Liu et al. (Reference Liu, Zhang, Lei, Yang and Wang2023) proposed a new method for simultaneously identifying tunnel defects as well as lining thicknesses from GPR images based on a multitask deep neural network and curve-fitting postprocessing operation. Liu et al. (Reference Liu, Lin, Cui, Fan, Xie and Spencer2020b) proposed an automatic detection and localization method using deep learning and migration for lining defects. The machine learning-based methodologies have demonstrated effectiveness in automatically classifying and identifying lining defects from GPR images.
GPR is a highly valuable technology that provides essential unstructured information across different fields. The nondestructive nature of GPR and its capability to deliver real-time, high-resolution data renders it indispensable for numerous applications. Despite GPR’s widespread success in acquiring unstructured data for UI condition assessment, some challenges and limitations still exist, including (1) limited penetration depth (which is typically within several centimeters to tens of meters) caused by electromagnetic wave signal attenuation with increasing detection depth, (2) high sensitivity to ground conditions where high moisture content attenuates radar signal and rough surfaces scatter radar waves, (3) difficulty in data interpretation as GPR data can be prone to noise in complex environments and thus is highly dependent on the operator’s proficiency, and (4) resolution and depth tradeoff where higher resolution is typically achieved with higher frequencies and limited depths, and vice versa. Additionally, other challenges like cost considerations, equipment operation, electromagnetic interference, and so on require meticulous management when using GPR to acquire unstructured data for UI assessment.
3.2.2. Closed-circuit television
Unstructured data acquisition by CCTV in UI refers to the process of utilizing CCTV cameras, sometimes mounted on robotic crawlers or remotely operated vehicles, to collect visual data in the form of video recordings or images to visualize the interior of underground conduits, tunnels, and so forth, aiding in the identification of defects such as blockages, corrosion, leakage, dislocation, and so on. The CCTV technique was first applied to pipeline corrosion detection in the mid-1960s and has been widely used for pipeline inspection globally since the 1980s (Wang et al., Reference Wang, Li and Li2022b). It has become an economical and appropriate tool for acquiring unstructured data from pipelines, especially from those that are too confined or dangerous for human entry. With its application scenarios becoming increasingly diverse, this method is gradually becoming a crucial tool for monitoring, inspecting, and assessing the condition of not only pipes but also tunnels, and other subsurface structures. Figure 11 illustrates the general process of unstructured data acquisition by CCTV for UI condition assessment.

Figure 11. General process of CCTV-based unstructured data acquisition for UI condition assessment.
For unstructured data acquisition on pipelines, CCTV has been used mainly to achieve the following purposes: identify structural defects such as cracks and joint offset, deformation in pipeline cross-section, and corrosion (Kumar et al., Reference Kumar, Abraham, Jahanshahi, Iseley and Starr2018; Yin et al., Reference Yin, Chen, Bouferguene, Zaman, Al-Hussein and Kurach2020), locate blockages and obstructions within pipelines to plan cleaning and maintenance operations (Hawari et al., Reference Hawari, Alamin, Alkadour, Elmasry and Zayed2018; Myrans et al., Reference Myrans, Everson and Kapelan2018; Romanova et al., Reference Romanova, Horoshenkov, Tait and Ertl2013), and also identify leaks and points of water infiltration in water supply and sewage systems (Jo and Boon, Reference Jo and Boon2012). In addition to pipes, tunnels, and conduits are also common UIs where CCTV has seen some applications in their structural assessment (including the identification of cracks, spalling, and other structural issues) (Khan et al., Reference Khan, Haider and Unwala2020). However, CCTVs in such UIs mainly perform vital functions related to security surveillance, traffic management, and incident documentation, instead of structural health monitoring and condition assessment.
After acquiring unstructured images or videos from CCTVs, the next main steps include the processing and analysis of these data to gain a good understanding of the UI conditions. Traditionally, the postassessment of structural conditions from CCTV inspection needs to be performed manually by trained operators, which is time-consuming and highly relies on the operators’ experience and skills (Yin et al., Reference Yin, Chen, Bouferguene, Zaman, Al-Hussein and Kurach2020; Zhou et al., Reference Zhou, Situ, Teng and Chen2021). The large volumes of unstructured data collected indicate that (1) significant storage capacity and efficient data management solutions are required and (2) reviewing and processing of the data can be complex, time-consuming, and labor-intensive. Recently, automated defect detection and classification methods based on machine learning algorithms have emerging and rapidly developing (Hawari et al., Reference Hawari, Alamin, Alkadour, Elmasry and Zayed2018; Kumar et al., Reference Kumar, Abraham, Jahanshahi, Iseley and Starr2018; Zhou et al., Reference Zhou, Situ, Teng and Chen2021), facilitating a significant improvement in accuracy, efficiency, and cost-effectiveness in UI condition assessment based on unstructured image data.
3.2.3. Unmanned aerial vehicles
Unstructured data acquisition by UAVs in UI involves using drones equipped with various cameras or sensors to collect high-resolution images, videos, and other data (Colomina and Molina, Reference Colomina and Molina2014). Similar to CCTV data acquisition, UAV data acquisition could provide information on critical UIs’ conditions, like tunnel defects including leakage, cracks, spalling, and void, from images and/or videos, which could further reveal tunnel deformation and other health issues based on image processing. Figure 12 briefly illustrates the UAV inspection on tunnel surface for image data acquisition, Table 7 lists some representative studies on UAV applications for UI unstructured data acquisition, and Figure 13 presents an example of tunnel geometrical reconstruction based on UAV-acquired image data.

Figure 12. Illustration of UAV image data acquisition on tunnel surface (Zhang et al., Reference Zhang, Hao, Zhang and Li2024).
Table 7. UAV-based image data acquisition for different UI condition assessments


Figure 13. Reconstructed inspection area of Dublin Port Tunnel (Zhang et al., Reference Zhang, Hao, Zhang and Li2024).
It is noted the applications of UAV in acquiring image data from UIs like tunnels have been relatively limited (Feng et al., Reference Feng, Zhang, Li, Wang and Wang2021; Mansouri et al., Reference Mansouri, Kanellakis, Kominiak and Nikolakopoulos2020; Özaslan et al., Reference Özaslan, Loianno, Keller, Taylor, Kumar, Wozencraft and Hood2017; Pahwa et al., Reference Pahwa, Chan, Bai, Saputra, Do and Foong2019; Tan et al., Reference Tan, Ng, Shaiful, Win, Ang, Yeung, Lim, Do and Foong2018; Zhang et al., Reference Zhang, Hao, Zhang and Li2024). This is primarily due to several significant challenges inherent to the underground environment, including (1) environmental interference to the sensors exemplified by the presence of airborne dusts and particles obscuring sensors, (2) insufficient visible light such as uneven lighting that affects visual sensors/cameras, contributing to poor image quality (for example, a minimum of 4 lux of luminance in a tunnel reported in (Zhang et al., Reference Zhang, Hao, Zhang and Li2024) is not enough for UAV inspection which requires a light intensity of at least 15 lux), (3) lack of global positioning system (GPS) signal that may lead to inaccurate UAV positioning, challenging autonomous flight and increasing collision risks, (4) complex navigation environment in confined space like narrow passages and tunnels with cables, pipes and other obstructions that may interfere with UAV’s flight path, (5) limited battery life (within a space of tens of minutes, e.g., 20–40 mins on a single battery) owing to constant maneuvering, and frequent battery change in long tunnels leading to data acquisition interruption, (6) coverage range that is influenced by multiple factors, including battery life, tunnel geometry, inspection requirements, tunnel conditions, and so on, leading to a disperse range of coverage from tens of meters to several kilometers in a single UAV flight, and (7) dependence of accuracy on onboard sensors and environmental conditions where positional accuracy can vary from several to tens of centimeters when GPS is available and measuring accuracy relies on lighting, dust, smoke, and so on. Despite these challenges and limitations, compared with other image/video acquisition techniques, such as camera-mounted vehicle inspection, the use of UAVs offers several advantages, including increased safety, lower costs, more efficient deployment and inspection processes, and greater accessibility and flexibility. UAVs can provide consistent photography and operate at various heights and angles, making them ideal for capturing images/videos in irregular and inaccessible environments (Toriumi et al., Reference Toriumi, Bittencourt and Futai2022; Zhang et al., Reference Zhang, Hao, Zhang and Li2023).
As recent technology innovations on UAVs are continuously being introduced to the field (Attard et al., Reference Attard, Debono, Valentino and Di Castro2018a), some problems such as navigation and localization, and autonomous path planning, have made great progress and improvement. Investigations have demonstrated the possibility of using LiDAR and laser sensors for autonomous path planning, collision avoidance, and navigation in both indoor and underground environments (Bi et al., Reference Bi, Lan, Li, Zhang, Qin, Lai and Chen2017; Li et al., Reference Li, Savkin and Vucetic2018a; Mansouri et al., Reference Mansouri, Kanellakis, Kominiak and Nikolakopoulos2020; Suzuki, Reference Suzuki2018; Tripicchio et al., Reference Tripicchio, Satler, Unetti and Avizzano2018; Vong et al., Reference Vong, Ravitharan, Reichl, Chevin and Chung2017). Nowadays, active research on crack detection for tunnel inspections based on UAVs has gained increasing attention, and more and more custom-built UAVs for tunnel inspection are proposed. The limited previous efforts on UAV image data acquisition in UI, like tunnels, demonstrated the positive potential for automatic UAV inspections but it should be highlighted their focus was mainly on the development of the acquisition methodology instead of on UI condition assessment. With the maturing of UAV inspections in unfavorable underground conditions, attention should be laid on automatic processing and analysis of the collected unstructured data for an enhanced and improved understanding of UIs, in the context of emerging digital image processing techniques based on machine learning and deep learning.
3.2.4. Infrared thermography
Acquisition of unstructured data from UIs by IRT features the use of thermal imaging cameras to capture thermal images to detect temperature changes that indicate potential issues. It can be applied to identify leaks (indicating the presence of water, gas, or other fluid leaks in pipelines), thermal anomalies (that indicate structural weaknesses such as cracks and voids), or areas of excessive heat in underground facilities, which are indicative of potential insulation issues, corrosion, or equipment malfunctions (Maldague, Reference Maldague2001). IRT includes both passive and active techniques. Figure 14 briefly illustrates its working principle. The former refers to the detection of natural temperature differences, while the latter refers to the detection of temperature differences after active heating, mainly for detecting deep subsurface defects (Jiang et al., Reference Jiang, Wang, Zhang, Dai, Ye, Sun, Liu, Wang and Zhao2023). In UI condition assessment, passive IRT is more commonly utilized for identifying water leakage, cracks, voids, moisture infiltration, and corrosion in transport tunnels (Afshani et al., Reference Afshani, Kawakami, Konishi and Akagi2019; Huh, Reference Huh2024; Jiang et al., Reference Jiang, Wang, Zhang, Dai, Ye, Sun, Liu, Wang and Zhao2023; Lu et al., Reference Lu, Zhu, Shi, Wang, Zeng, Hu, Liu, Xu and Chen2019; Yu et al., Reference Yu, Wu, Liu and Xu2018), diagnosing pipe crown conditions (invisible liner defect) of utility tunnels (Sham et al., Reference Sham, Lai, Chan and Koh2019), detecting leaks in buried water pipelines (Bach and Kodikara, Reference Bach and Kodikara2017; Yahia et al., Reference Yahia, Gawai, Ali, Mortula, Albasha and Landolsi2021), and so forth Table 8 summarizes these representative IRT studies on acquiring thermal images for UI condition assessment.
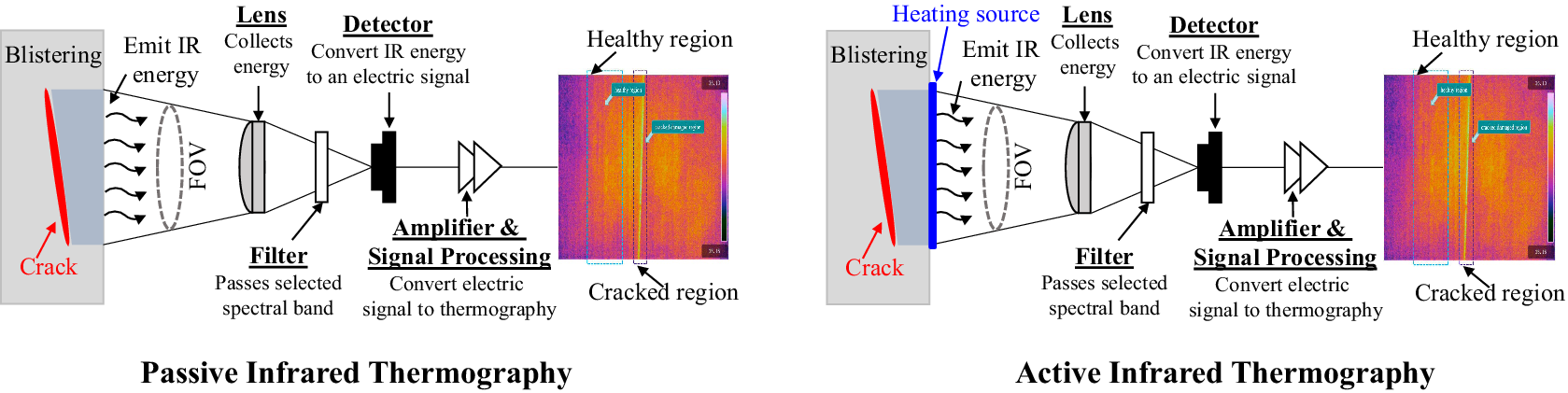
Figure 14. Working principle of passive and active IRT.
Table 8. IRT-based thermal image data acquisition for different UI condition assessments

Acquiring unstructured thermal image data from various UIs by using IRT brings advantages like noninvasive inspection of critical UIs, early detection of structural problems like water leakage, cracks, and voids, real-time collection of thermal images, etc., as well as challenges, including influential factors like high humidity, dust and poor light that may affect the accuracy of thermal imaging, heavy reliance on specialized expertise on data interpretation, dependence of high-quality data on high-quality camera, and so forth. Figure 15 gives a summary of these pros and cons.

Figure 15. Advantages and challenges of IRT in acquiring thermal image of UIs.
The challenges faced by the IRT technique in thermal image acquisition necessitate the further development of more accurate and reliable algorithms for UI condition assessment. This points out some promising future directions for IRT, including integration with other technologies exemplified by GPR to provide a more comprehensive assessment of various UIs, the development of advanced algorithms and machine learning techniques to improve automated analysis and interpretation of thermal images, and the use of robotic systems such as UAVs mounted with infrared cameras for remote and autonomous inspections.
3.3. Discussion and comparison of unstructured data acquisition
In Section 3.2, a comprehensive review of the commonly used techniques for acquiring unstructured image and/or video data in UI is presented. It is necessary to understand their similarities and differences in unstructured data acquisition for the reference of engineers, researchers, etc., in terms of infrastructure condition assessment. Table 9 gives a detailed comparison among the listed data acquisition methods from various aspects of unstructured data, including data type, data size, sampling interval, data management, and transmission and processing. It is clear that CCTV and UAV methods produce the largest data volumes due to their continuous video recording and high-resolution imaging, posing greater challenges to data storage, transmission, and processing, while GPR and IRT produce smaller volumes of image data that are more manageable. Despite the differences in the above aspects of unstructured data acquisition, these methods follow a similar general workflow, including image acquisition, image enhancement, image processing, and defect analysis, as shown in Figure 16. The common steps for the above-mentioned techniques are image processing and defects analysis, while the differences lie in image acquisition which is based on various physical mechanisms and principles. Different inspection methods have their advantages, disadvantages, and scope of applications, which means relying solely on one technique typically leads to limited performance in UI condition assessment.
Table 9. Comparison of unstructured data acquisition

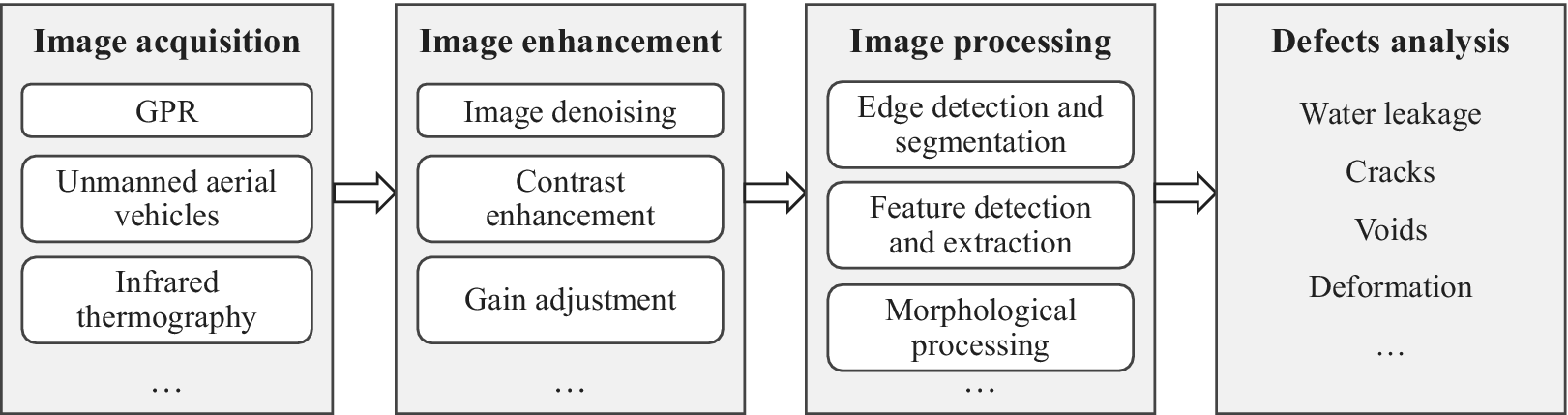
Figure 16. Flowchart of acquiring unstructured image/video data.
4. Discussion, conclusion, and recommendation
4.1. Discussion
The acquisition of both structured and unstructured data is essential for the comprehensive condition assessment of UIs. This study highlights the evolution of data acquisition methods from traditional techniques to more advanced automatic systems, focusing on both structured data (e.g., stress, strain, displacement) and unstructured data (e.g., images and videos). Traditional structured data acquisition methods, such as total stations and strain gauges, have been reliable but are labor-intensive and prone to human error. The advent of technologies such as WSN, DFOS, and TLS has revolutionized data acquisition, offering higher accuracy, real-time monitoring, and reduced human intervention. These advanced methods facilitate large-scale, continuous data collection, essential for modern UIs’ maintenance and management. Unstructured data acquisition in UIs, mainly involving images and videos, leverages techniques such as GPR, closed-circuit television, and unmanned aerial vehicles. These methods provide detailed visual information, capturing aspects that structured data may miss. The integration of data analytics, like machine learning algorithms, with these methods enhances the analysis and interpretation of vast volumes of datasets, improving defect detection and condition assessment. For example, Lin et al. (Reference Lin, Ye, Tan, Wang and Yin2024) employed machine learning algorithms such as random forest and support vector machine to classify strain profiles acquired from DFOS in identifying structural cracks and cavities in underground structures. Hou et al. (Reference Hou, Li, Hu, Feng, Zhou and Cheng2021) adopted neural network to enhance the accuracy and efficiency of tunnel deformation monitoring by DFOS, aiming to automatically map strain measurements from DFOS to the actual deformation shape of tunnel cross-sections. To address the challenges related to manually interpreting the vast amount of DFOS data during monitoring of structural cracks, Liu and Bao (Reference Liu and Bao2023) integrated the data with deep learning algorithms to automate the detection and localization of cracks in real time. These case studies showcase such an integration can help enhance the accuracy, efficiency, and reliability of UI condition assessment. This combination enables more precise defect detection, predictive maintenance, and so on, while reducing human subjectivity and error in data analysis, ultimately leading to safer and more reliable infrastructure management. Despite the significant advancements, there are some challenges, including high initial cost, need for specialized technical expertise, and dependence on environmental conditions, and they affect the widespread deployment of these advanced data acquisition systems. Moreover, managing and analyzing large volumes of data necessitate robust data management solutions and sophisticated analytical tools. To quantitatively compare traditional methods and advanced methods in acquisition of both structured and unstructured data, Table 10 lists some quantitative measures of their costs, accuracy, and reliability. It is easy to notice (1) in structured data acquisition, traditional methods such as total stations and strain gauges are relatively low-cost, while advanced methods such as DFOS and TLS can be quite expensive, (2) generally, structured data acquisition methods such as DFOS, TLS, and WSN offer high accuracy, while unstructured data acquisition methods such as GPR and UAV tend to have medium-high accuracy due to the influence of environmental conditions, equipment quality, and manual operation, and (3) structured data acquisition methods typically offer high reliability, due to the well-established techniques such as strain gauges and continuous and precise monitoring techniques such as DFOS. In contrast, the reliability of unstructured data acquisition methods such as GPR and CCTV is considered to be medium owing to their sensitivity to ground and environmental conditions. The comprehensive comparison allows for a better understanding of the tradeoffs between various data acquisition methods, helping to choose the most suitable and efficient approach based on the specific needs of UI projects.
Table 10. Quantitative comparison of cost, accuracy, and reliability of data acquisition methods

4.2. Conclusion
This article reviewed various representative methods for acquiring structured and unstructured data for UI condition assessment, highlighting their advantages, limitations, and potential integration. The shift toward advanced and automated, real-time, and continuous data acquisition methods from traditional ones represents an improvement in monitoring the health and performance of UIs. The main research findings are summarized as follows:
With regard to structured data acquisition for UI condition assessment, (1) traditional structured data acquisition methods usually obtain a relatively low volume of data due to low sampling frequency, manual data collection and transmission, whereas more advanced and automatic methods can gather a relatively larger volume of data due to automatic data collection, high, continuous sampling frequency and comprehensive monitoring; (2) the quality of structured data gathered by conventional methods remains largely low to medium due to factors such as subjectivity in data reading, environmental conditions, signal interference, human error, instrument sensitivity, and so forth, compared to relatively higher data quality by advanced methods; (3) traditional methods are characterized by heavy reliance on human involvement, including manual installation and calibration, manual operation and data collection, while the more advanced techniques minimize human intervention, thus enabling a medium to a high level of automation and subsequent improvement in data acquisition efficiency, data accuracy, data quality, and data comprehensiveness. In terms of unstructured data acquisition, (1) the techniques reviewed typically require low-moderate initial cost in comparison to the relatively high initial investment in advanced structured data acquisition methods; (2) methods such as CCTV and UAV often produce large volumes of image/video data that have medium-high accuracy due to the influence of environmental conditions, equipment and sensor quality, compared to the high accuracy offered by WSN, DFOS, and TLS; (3) the reliability of unstructured data acquisition methods such as GPR and IRT is considered to be medium owing to their sensitivity to ground and environmental conditions, when compared with structured data acquisition techniques like DFOS that typically offer high reliability due to its continuous and precise monitoring capabilities; (4) the methods reviewed are only responsible for collecting raw unstructured images or videos, and they do not inherently possess the capability for automated postprocessing and analysis, necessitating the integration of data analytics to enable automated unstructured data processing and analysis and therefore more efficient, effective, and accurate UI condition assessment.
4.3. Recommendation
To assess the condition of UIs, acquiring large volumes of both structured and unstructured data is the first step. To enable efficient, accurate, and reliable UI condition assessment, it is recommended (1) to integrate advanced artificial intelligence and machine learning algorithms to automate the analysis and interpretation of the collected big data, which can help enhance the accuracy and reliability of UI condition assessment, enable effective decision-making, and predict potential failures and maintenance needs, facilitating proactive rather than reactive maintenance strategies; (2) to develop robust big data management platforms capable of handling large volumes of data and supporting cloud integration for scalable storage, processing, and real-time analysis; (3) to couple different data acquisition technologies to leverage the strengths of each method, aiming to provide a more comprehensive understanding of UI conditions; (4) to continuously improve data acquisition techniques by investing in sensor development and algorithm enhancement to ensure efficient data acquisition in harsh underground conditions, such as GPS-denied deep tunnels.
Acknowledgment
The authors acknowledge the support from Science Foundation Ireland for research grant under the Frontiers for the Future Program (grant number: 21/FFP-P/10090).
Author contribution
Chao Wang: Conceptualization, Formal analysis, Investigation, Methodology, Validation, Writing—original draft; Zhipeng Xiao: Conceptualization, Formal analysis, Investigation, Writing—original draft; Yixian Wang: Resources, Writing—review and editing; Fei Wang: Resources, Writing—review and editing; Zili Li: Conceptualization, Funding acquisition, Project administration, Supervision, Writing—review and editing.
Competing interest
The authors have no competing interests to declare.
Data availability statement
No data were used or generated during the course of this research.
Funding statement
This work received funding from the Frontiers for the Future Program (grant number 21/FFP-P/10090) of Science Foundation Ireland.



























 Open access
Open access
Comments
No Comments have been published for this article.