1. Introduction
In recent years, with the continuous development of robotics and the increasing cost of labor, it has become a development trend to replace human beings with robots [Reference Jiang, Li, Sun, Hu, Yun and Liu1]. At present, intelligent robots have been widely used in various fields such as industry, agriculture, medical care, and life. Humans have always hoped that intelligent robots can perceive and interact with the environment in different application scenarios, which can make the work efficient, accurate, and safe [Reference Du, Wang, Lian and Zhao2, Reference Liu, Tian, Zhang, Zhang and Liu3]. Therefore, the research and development of robot operation skills have important practical significance for transforming and upgrading the manufacturing industry and the improvement of the current situation of social labor shortage.
In robot control, the grasping skill of the robot arm is an important part, which is also the basis for the robot to move and transport objects [Reference Sanchez, Corrales, Bouzgarrou and Mezouar4]. As the most commonly used primary action of robots, robotic arm autonomous grasp has a wide range of application prospects. Compared with traditional manual operation, it can perceive the external environment in the process of grasping, and there is no need to set the pose of the target before each grasp, which dramatically improves the work efficiency. However, it is still an unsolved challenge to accurately grasp arbitrary objects when the robotic arm is working in unstructured environments or affected by other uncertain factors [Reference Morrison, Corke and Leitner5–Reference Mohammed, Chung and Chyi7].
To solve these problems, many researchers are devoted to improving the interaction perception ability of robots with the external environment, and the emergence of machine vision makes up for the defects in the ability of robots to perceive the external environment to some extent. In recent years, with the successive appearance of Microsoft Kinect, Intel RealSense, and other visual sensing devices [Reference Gong, Ling, Dong and Shotton8, Reference Zabatani, Surazhsky, Sperling, Moshe, Menashe, Silver, Karni, Bronstein, Bronstein and Kimmel9], as well as the continuous development of relevant visual algorithms, the perception ability of robots in different scenes has been significantly improved, which makes the robot achieve breakthrough progress in the field of intelligent grasp.
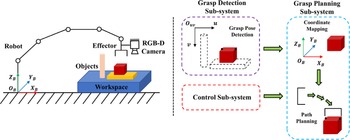
In addition, the proposal of deep learning makes artificial intelligence technology more widely integrated into machine vision. Deep learning relies on the powerful computing ability of computers to autonomously learn relevant information from large datasets, which can enable robots to better adapt to unstructured environments and is widely used for general target detection with ideal results [Reference Kleeberger, Bormann, Kraus and Huber10]. The emergence of deep learning has promoted the process of robot intelligence. When faced with different task scenarios and target poses, the robot arm can execute grasp operations autonomously, effectively improving the working efficiency of the system. Therefore, using deep learning is the main research direction of robot intelligent grasp, which has far-reaching significance for developing the robot control field. Generally speaking, a complete robotic grasping system mainly includes three parts [Reference Kumra and Kanan11], as shown in Fig. 1:

Figure 1. The robotic grasping system. Left: The robot is equipped with an RGB-D camera and end effector for grasping target objects in the workspace. Right: The whole system mainly includes three parts: the grasp detection subsystem, the grasp planning subsystem, and the control subsystem.
Grasp detection subsystem: To detect the target object from images and obtain its position and pose information in the image coordinate system.
Grasp planning subsystem: To map the detected image plane coordinates to the robot base coordinate system and generate a feasible path from the manipulator to the target object.
Control subsystem: To determine the inverse kinematics solution of the previous subsystem and control the robot to execute the grasp according to the solution results.
As the starting point of the whole system, the primary purpose of grasp detection is to detect the target objects and generate the grasp poses to achieve a stable and effective grasp. The grasp planning and the control subsystem are more relevant to the motion and automation discipline, which are not the focus of this paper.
At present, there are many review papers about robotic grasping technology. However, most are based on introducing the entire grasping process, and there are few specific discussions on robotic grasp detection. For example, refs. [Reference Al-Gallaf, Allen and Warwick12–Reference Bicchi and Kumar15] mainly introduced robotic grasping based on the mechanics of grasping and the finger–object contact interactions, which focus on the essence of grasping, but are not novel enough. Refs. [Reference Gong, Ling, Dong and Shotton8, Reference Kleeberger, Bormann, Kraus and Huber10] mainly reviewed the current research progress of generalized robotic grasping from machine vision and learning perspectives. Refs. [Reference Du, Wang, Lian and Zhao16, Reference Caldera, Rassau and Chai17] focused on the review of robotic grasp detection, but the classification of grasp detection is not detailed enough. Therefore, this paper firstly classifies the robotic grasp detection technology in detail. Then, many classical or novel grasp detection techniques and related research progress are introduced. Finally, we analyze the future research direction and development trend of robotic grasp detection technology, which provides a certain reference for the research and practical application in this field.
2. Categorization of methods
Current robot grasp detection methods have various classification methods according to different criteria, which can generally be divided into two major categories [Reference Sahbani, El-Khoury and Bidaud14, Reference Bohg, Morales, Asfour and Kragic18]. The first category is the traditional analytic method (sometimes called the geometric method) [Reference Kleeberger, Bormann, Kraus and Huber10], whose basic principle is to determine the appropriate grasp pose by analyzing the geometry, motion state, and force of the target object. The second category is the data-driven method based on machine learning (sometimes called the empirical method) [Reference Kleeberger, Bormann, Kraus and Huber10], the basic principle of this method is to let the robot imitate the human grasp strategy for grasp detection, which does not need to establish complex mathematical or physical models before grasping, but the calculation is relatively complex. However, with the increase in data availability, computer performance, and the improvement of related algorithms, more and more researchers chose to use the data-driven method. Therefore, this paper will focus on introducing the data-driven method. As for the analytic method, this paper will briefly introduce it.
3. Grasp detection technology based on analytic methods
The analytic methods usually require the kinematic and dynamic modeling of the grasp operation to find stable grasp points that can satisfy the constraints (such as grasp flexibility, balance, and stability). Generally, according to the multi-objective optimization methods, to find a stable grasp point needs to consider all the constraints. However, due to the high dimension of the grasp search space and the nonlinearity of the constraint conditions, only some of the limitations are considered and others are assumed as known or ignored. By reviewing relevant papers, the analytic methods can be divided into form-closure grasp, force-closure grasp, and task-oriented grasp [Reference Sahbani, El-Khoury and Bidaud14], which will be introduced in the following sections.
3.1. Form-closure grasp
Form-closure and force-closure are two major bases for judging the stability of a robot grasp [Reference Bicchi19]. Form-closure means the robot can completely restrain the object’s motion in any direction without any positional change by configuring a suitable grasping position. As for how to judge whether a grasp is a form-closed, Salisbury and Roth [Reference Salisbury and Roth20] have demonstrated that a necessary and sufficient condition for form-closure is that the origin of the wrench space lies inside the convex hull of primitive contact wrenches. Liu [Reference Liu21] further demonstrated that the problem of querying whether the origin lies inside the convex hull is equivalent to a ray-shooting problem, which is dual to an LP problem based on the duality between convex hulls and convex polytopes. Ding et al. [Reference Ding, Liu and Wang22] studied higher-dimensional form-closure grasp and represented the n-finger form-closure grasp by two sets of inequalities involving the friction cone constraint and the form-closure constraint. The authors [Reference Prattichizzo and Trinkle23] simplified the above problems and defined a distance function to represent the distance between the manipulator and the target, as shown in Eq. (1):
 \begin{equation} d=\psi _{i}\left(u,q\right),1\leq i\leq n_{c}\rightarrow \left\{\begin{array}{l} d\gt 0, \text{no contact}\\[5pt] d=0,\text{contacted}\\[5pt] d\lt 0,\text{penetrated} \end{array}\right. \end{equation}
\begin{equation} d=\psi _{i}\left(u,q\right),1\leq i\leq n_{c}\rightarrow \left\{\begin{array}{l} d\gt 0, \text{no contact}\\[5pt] d=0,\text{contacted}\\[5pt] d\lt 0,\text{penetrated} \end{array}\right. \end{equation}
where u and q represent the configurations of the target and manipulator for a given grasp, respectively,
 $n_{c}$
indicates the number of contacts between the manipulator and the object. Based on the definition of the distance function, they further proposed a judgment formula about the form-closure grasp. When the object’s position produces a differential change
$n_{c}$
indicates the number of contacts between the manipulator and the object. Based on the definition of the distance function, they further proposed a judgment formula about the form-closure grasp. When the object’s position produces a differential change
 ${\Delta} u$
, it is necessary to satisfy that there is no penetration between the manipulator and the object
${\Delta} u$
, it is necessary to satisfy that there is no penetration between the manipulator and the object
 $(d\geq 0)$
. Solving this inequality, if there exists only a solution for
$(d\geq 0)$
. Solving this inequality, if there exists only a solution for
 ${\Delta} u=0$
, it means that the current grasp action is a form-closure grasp. The whole process can be represented by Eq. (2):
${\Delta} u=0$
, it means that the current grasp action is a form-closure grasp. The whole process can be represented by Eq. (2):
 \begin{equation} \psi _{i}\left(u+{\Delta} u,q\right)\geq 0\overset{\text{sove the inequality}}{\rightarrow } {\Delta} u=\left\{\begin{array}{l} 0\\[5pt] \text{others} \end{array}\right. \end{equation}
\begin{equation} \psi _{i}\left(u+{\Delta} u,q\right)\geq 0\overset{\text{sove the inequality}}{\rightarrow } {\Delta} u=\left\{\begin{array}{l} 0\\[5pt] \text{others} \end{array}\right. \end{equation}
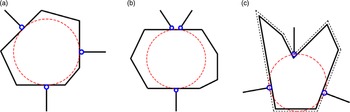
Early studies on form-closure mainly focused on objects with simple geometry. Baker et al. [Reference Baker, Fortune and Grosse24] presented a method that achieves a stable grasp for 2D polygonal objects with a hand consisting of three spring-loaded fingers and with five degrees of freedom (DOFs). In this method, they proposed corresponding grasping strategies for convex polygons and nonconvex polygons, as shown in Fig. 2. On this basis, Markenscoff et al. [Reference Markenscoff and Papadimitriou25] proved that any polygon object (except the circle) can always be form-closed with four frictionless contacts. They also indicated that a spatial object can be form-closed with only seven frictionless contacts in three dimensions.

Figure 2. The three-finger stable grasping strategy for convex polygons and nonconvex polygons proposed in ref. [Reference Baker, Fortune and Grosse24]. (a) For convex polygons, the maximal inscribed circle touches the polygon at three points. (b) For convex polygons, the maximal inscribed circle touches at two parallel edges. (c) For nonconvex polygons, the inscribed circle intersects a concave vertex or a linear edge of the expanded polygon.
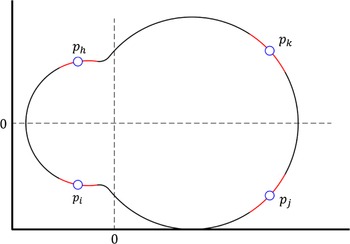
As for complex geometry, other researchers also gave the calculation methods of form-closure grasp. Nguyen [Reference Nguyen26] proposed a simple test algorithm for two-finger form-closure grasps. Ponce and Faverjon [Reference Ponce and Faverjon27] developed several sufficient conditions for three-finger form-closure grasps and computed all grasps satisfying those sufficient conditions. Cornellà and Suarez [Reference Cornella and Suárez28] performed 2D fixture planning of nonpolygonal workpieces based on the form-closure and proposed a method for computing the independent form-closure region. They used the object presented in ref. [Reference Faverjon and Ponce29] to validate the proposed method (as shown in Fig. 3), and four frictionless contacts were selected from the object boundary within an independent region to realize the form-closure grasp and improve the robustness of the grasp.
3.2. Force-closure grasp
Force-closure means that the appropriate contact force counteracts the external force on the object at the grasp points to constrain the object’s movement completely. In past studies, there is a wide disparity in the descriptions of terms such as equilibrium, stability, form-closure, and force-closure in related literature [Reference Nguyen26, Reference Bicchi30–Reference Trinkle32]. We adopt the terminology in [Reference Howard and Kumar31] and summarize an equation to describe the force-closure. A grasped object with an external wrench is in equilibrium if and only if:
 \begin{equation} \left\{\begin{array}{l} \forall i, c_{n}^{i}\gt 0, \left| c_{t}^{i}\right| \lt \mu _{t}^{i}c_{n}^{i}, \left| c_{s}^{i}\right| \lt \mu _{s}^{i}c_{n}^{i}\\[5pt] W\lambda +\hat{W}=0, \lambda \neq 0 \end{array}\right. \end{equation}
\begin{equation} \left\{\begin{array}{l} \forall i, c_{n}^{i}\gt 0, \left| c_{t}^{i}\right| \lt \mu _{t}^{i}c_{n}^{i}, \left| c_{s}^{i}\right| \lt \mu _{s}^{i}c_{n}^{i}\\[5pt] W\lambda +\hat{W}=0, \lambda \neq 0 \end{array}\right. \end{equation}
In Eq. (3),
 $c_{t}^{i}, c_{n}^{i}, c_{s}^{i}$
, respectively, represent the tangential force, normal force, and torque at the
$c_{t}^{i}, c_{n}^{i}, c_{s}^{i}$
, respectively, represent the tangential force, normal force, and torque at the
 $i\text{th}$
contact.
$i\text{th}$
contact.
 $\mu _{t}^{i}$
and
$\mu _{t}^{i}$
and
 $\mu _{s}^{i}$
, respectively, represent the tangential and torsional friction coefficient.
$\mu _{s}^{i}$
, respectively, represent the tangential and torsional friction coefficient.
 $W$
indicates the spiral consisting of force and moment,
$W$
indicates the spiral consisting of force and moment,
 $\lambda$
is a coefficient, and
$\lambda$
is a coefficient, and
 $\hat{W}$
represents the external spiral.
$\hat{W}$
represents the external spiral.

Figure 3. Independent regions (red edges) and frictionless contacts (blue points) on the object boundary.
There is a specific relation between force-closure and form-closure grasp. Form-closure property is usually a stronger condition than force-closure, and the analysis of form-closure is essentially geometric [Reference Sahbani, El-Khoury and Bidaud14]. More precisely, a grasp achieves form-closure if and only if it achieves force-closure with frictionless point contacts. In this case, form-closure and force-closure are dual to each other [Reference Nguyen26, Reference Zhu and Wang33]. Hence, like form-closure, most of the early studies about force-closure focused on 2D objects due to the geometric simplicity and low calculation cost. Related works can be found in [Reference Nguyen26, Reference Ponce and Faverjon27, Reference Liu34]. As for 3D objects, there are two main research aspects of force-closure grasp: (1) simplifying the contact model between the manipulator and the target; (2) finding optimal fingertips locations such that the grasp is force-closure.
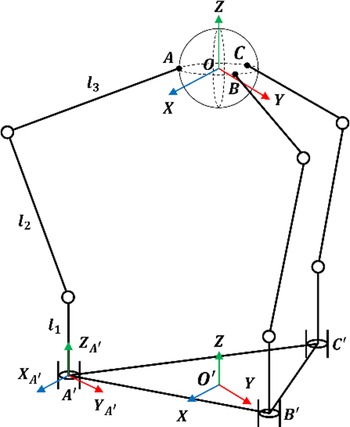
Understanding the nature of contact is paramount to the analysis of grasping. Ciocarlie et al. [Reference Ciocarlie, Miller and Allen35] discussed some possible contact models, such as point contact with friction and soft finger contact. They also extended a simulation and analysis system with finite element modeling to evaluate these complex contact types. Bicchi et al. [Reference Bicchi and Kumar15] analyzed the interrelationship between the contact model and the grasp contact forces in static grasping and found that not all contact internal forces need to be controlled, which means the DOFs of the end effector can be less than the contact forces. Rosales et al. [Reference Rosales, Suárez, Gabiccini and Bicchi36] established a grasp contact model by introducing flexibility into the joint points and contact points of the robotic hand. Then, they analyzed the contact accessibility, object impedance, and manipulation force controllability as grasp constraints and finally achieved the force-closure grasp. Jia et al. [Reference Jia, Li, Wang and Li37] proposed a grasping algorithm based on the volume and flattening of a generalized force ellipsoid. They used the maximum volume of a generalized external force ellipsoid and the minimum volume of a generalized contact internal force ellipsoid as the objective function to establish an optimal grasp planning method to achieve the minimum internal force stable grasp of the three-finger dexterous hand, as shown in Fig. 4.

Figure 4. Schematic figure of the grasping method proposed in ref. [Reference Jia, Li, Wang and Li37]: grasping a sphere with a three-finger dexterous hand.
In general, multiple grasping methods exist for the same target to satisfy the force-closure. Mostly, optimal force-closure grasp synthesis concerns determining the contact point locations so that the grasp achieves the most desirable performance in resisting external wrench loads [Reference Sahbani, El-Khoury and Bidaud14]. Many researchers have used this as a heuristic method. They optimize the objective function according to the predefined grasp quality criteria to compute the optimal force-closure grasp. For example, Lin et al. [Reference Lin, Burdick and Rimon38] used the elastic deformation energy equivalent principle to calculate the optimal force-closed grasp and proposed a quality metric theory based on the grasping stiffness matrix. Ferrari et al. [Reference Ferrari and Canny39] solved the problem of optimal force-closure grasp by computing the maximum sphere in force screw convex space, which is easy to calculate but has limited applications. Mo et al. [Reference H.40] also took the maximum force screw as a performance index to optimize the grasping position. Under the constraint of force-closure, an optimization model between the grasping position and maximum force screw was established. This method offsets the limitation that the generalized force ellipsoid is dimensionless to express the grasping effect clearly.
All of these methods designed various stability criteria to find the optimal grasps. After studying a variety of human grasps, the authors in [Reference Cutkosky and Wright41] conclude that the choice of a grasp is determined by the tasks to be performed with the object. As a result, many researchers studied and addressed the task-oriented grasp, which will be introduced in the next section.
3.3. Task-oriented grasp
A good grasp plan is usually task-oriented, but there are few studies on task-oriented grasp for two main reasons: (1) it is complicated for modeling tasks, and (2) a single criterion lacks generalization ability, and different grasping criteria need to be designed for different tasks. Therefore, Li and Sastry [Reference Li and Sastry42] modeled the task by setting a 6D ellipsoid in the object wrench space (OWS) and designed three grasp criteria: the smallest singular value of the grasping matrix, the volume in wrench space, and the task-oriented grasp quality, which achieved ideal evaluation results. The problem with this approach is how to model the task ellipsoid for a given task, which the authors state to be quite complicated.
Pollard et al. [Reference Pollard43] considered that a task is characterized as the wrench spaces that must be applied to the object by the robot to complete the task objective. If nothing is known about the grasping task and each wrench direction is assumed to occur with equal probability as a disturbance, the task wrench space (TWS) can be modeled as a unit sphere. Nevertheless, this approach lacks a physical interpretation since wrenches occurring at an object boundary are not uniform, and the computed grasps are unlikely to be perfect for a given task or object. Therefore, they modeled the TWS as an OWS, incorporated the geometry of the object into the grasp evaluation, and then considered the effect of all possible disturbances on the object to the task and evaluated the grasping quality by scaling the TWS and OWS. Since OWS contains all spirals generated by disturbing forces which could act anywhere on the surface of an object, it is possible to generalize any task and model the TWS with OWS if the grasping task is unknown. Borst et al. [Reference Borst, Fischer and Hirzinger44] approximated the OWS as an ellipsoid and fitted it to a linearly transformed TWS to obtain another representation of the TWS. For a given TWS, the maximum scale factor is searched in order to place it into the grasping wrench space (GWS) (as shown in Fig. 5), and the grasp quality is then obtained by comparing the TWS with the GWS.

Figure 5. An ellipsoid is used to approximate the object wrench space.
Considering the complexity of the TWS modeling process, some researchers have used novel devices or technologies that can more easily complete the given grasping task. EI-Khoury et al. [Reference El-Khoury, de Souza and Billard45] proposed a task-oriented approach based on manual demonstration and sensor devices. Firstly, the operator demonstrated the given task and obtained the force or moment through the sensor. Then, they modeled the task and calculated the grasp quality according to the task compatibility criterion. The experimental results show that the proposed method can be adapted to different hand kinematics models. Deng et al. [Reference Deng, Zheng, Zhang and Zhang46] studied the reach-to-grasp (RTG) task and proposed an optimal robot grasp learning framework by combining semantic grasp and trajectory generation. Through experimental verification, this learning framework can enable a robot to complete the RTG task in the unstructured environment.
3.4. Summary
The application of analytic methods can accurately detect the robot grasp configuration with superior mechanical properties or satisfy task requirements from the image, which is widely used in early research. However, the quality of the detection results largely depends on the exact geometric model of the object and robotic hand, and there are certain limitations in the practical application:
-
1. First, it is not easy to obtain accurate geometric models of objects and manipulators, and there are always subtle differences between the actual objects and the geometric models.
-
2. With the transformation of the robot operating environment from a structured environment to an unstructured environment, there will be various errors in the environment, such as model errors, control errors, and noise. Therefore, the grasp detection results based on analytic methods have poor adaptability in an unstructured environment.
-
3. For complex geometric models, it is very time-consuming to calculate stable grasp poses by the analytic methods, which significantly reduces the robot’s work efficiency, and it is difficult to satisfy the real-time requirements of the actual grasp process of the robot, and it is impossible to grasp objects with unknown models.
4. Grasp detection technology based on data-driven methods
The data-driven methods rely mainly on the previously known successful grasp experience and can be classified in various ways. Firstly, it can be classified according to the applied algorithm, that is, whether the system uses heuristic or learning methods for grasp detection [Reference Wiering and van Otterlo47]. Secondly, it can be classified according to the perceived information as model-based and model-free grasp detection [Reference Bormann, de Brito, Lindermayr, Omainska and Patel48]. It can also be divided into single-object scene and multi-object scene grasp detection according to the number of target objects [Reference Kleeberger, Bormann, Kraus and Huber10]. Furthermore, the grasp detection of known and unknown objects can be classified according to whether the system has previous grasp experience with the targets [Reference Bohg, Morales, Asfour and Kragic18]. The last classification methods better reflect the characteristics of data-driven methods, which will be introduced specifically in the following sections.
4.1. Grasp detection of known objects
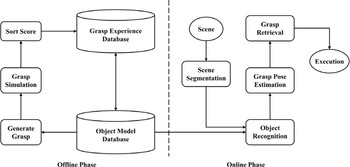
A known object usually has a complete 3D geometric model and grasp poses set. The robot can access this set and choose a good grasp pose that already exist in the set before performing the grasp operation. This set is generally constructed offline and called the grasp experience database. Figure 6 shows the basic process of grasping a known object.
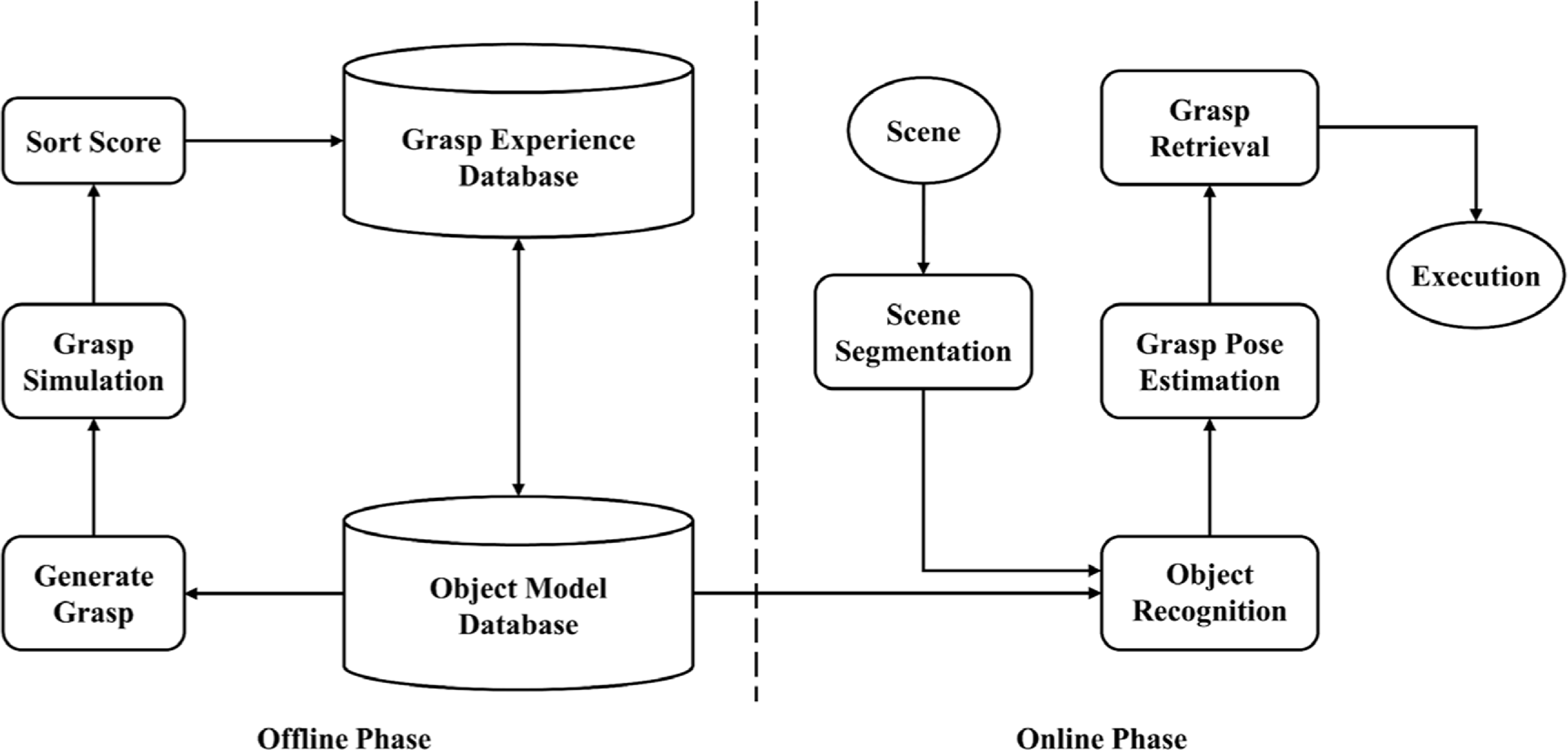
Figure 6. Typical process for grasping known objects.
In the offline stage, the models in the object model database are first analyzed to generate a number of grasp poses. Then, each grasp candidate was simulated and scored according to the simulation results. Finally, each grasp position is sorted according to the score, and the mapping relationship between the grasp pose and the grasp experience database is established for grasp retrieval in the online stage.
In the online stage, the target object is first segmented from the scene. Then, the recognition of the object and the estimation of the grasp pose are performed. After that, an existing grasp pose is retrieved from the grasp experience database according to the pose estimation results. Finally, the robot performs the grasp operation based on the retrieved pose results.
For the grasping of known objects, its related research mainly focuses on two points. The first is how to establish an offline grasp experience database. The second is how to execute object recognition and pose estimation. According to the different ways of establishing the offline database, the grasp detection methods of known objects can be divided into three categories: direct analysis methods based on 3D models, demonstration methods, and trial-and-error methods, which will be introduced in the following sections.
4.1.1. Direct analysis methods based on 3D models
This kind of method needs to assume that the 3D model of the object is known, and the difficulties include how to generate good grasp poses automatically, how to set the evaluation criteria of the grasp poses, and how to sample the grasp poses on the object’s surface.
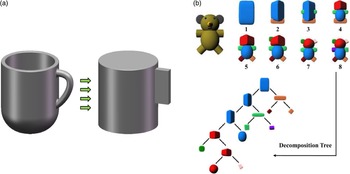
Early representative research methods include the pose generation method based on shape primitive decomposition proposed by Miller et al. [Reference Miller, Knoop, Christensen and Allen49]. In this method, the target object is firstly decomposed into simple basic geometric models (sphere, cylinder, cone, etc., as shown in Fig. 7(a)), and a series of robot pre-grasp poses are generated by combining the grasp of these basic geometric models. Then use the “Gasp It!” [Reference Miller and Allen50] grasp simulator to test the feasibility of the grasp poses and evaluates the grasp quality, and finally the construction of the grasp experience database is completed. Goldfeder et al. [Reference Goldfeder, Allen, Lackner and Pelossof51] further studied this method and proposed the concept of the superquadratic decomposition tree. For models with complex geometric shapes, the whole grasp space of the model can be divided into multiple small grasp subspaces and arranged in the form of a tree, as shown in Fig. 7(b).

Figure 7. The generation of grasp poses based on the shape primitive decomposition method. (a) Decompose the target object (mug) into two basic geometric models: a cylinder and a cuboid. (b) For models with complex geometric shapes, the superquadratic decomposition tree is established (the figure is from ref. [Reference Goldfeder, Allen, Lackner and Pelossof51]).
Considering the shape primitive decomposition method has low computational efficiency and accuracy, Pelossof et al. [Reference Pelossof, Miller, Allen and Jebara52] used support vector machine (SVM) algorithm [Reference Cortes, Vapnik and Networks53] to establish a regression mapping among object shape, grasp parameters, and grasp quality. After training, this regression mapping can effectively estimate the grasp parameters with the highest grasp quality for the new shape parameters. However, this method is simulated and verified on a grasping simulator, which has certain limitations for grasping real objects. Hereto, a pre-grasp pose generation method based on abstract image matching for grasping simple geometric models from unstructured scenes was proposed in ref. [Reference Nieuwenhuisen, Stückler, Berner, Klein and Behnke54]. Firstly, the 3D point cloud of the target object and scene is obtained and converted into an annotated graph. Each node in the graph represents the detected simple shape or scene, and each edge stores the relative pose of the primitives. Next, objects in the scene are located by matching parts of the target graph in the scene graph, and a rigid transformation is calculated to verify the pose of the original model in the scene (the whole object recognition process is shown in Fig. 8). Finally, the estimation effect of the grasp poses is evaluated by comparing whether the point clouds between the rigid transformation results and the initial scanning results have enough overlap, and the evaluation results are sorted and input to the grasp simulator to complete the construction of the grasp experience database.

Figure 8. The object recognition process: input scan → fast preprocessing, primitive detection → abstract graph generation → match, transformation estimation, and verification.
4.1.2. Demonstration methods
The basic principle of this method is to let the robot learn how to grasp objects by observing and imitating the operator’s grasping actions. During this process, two perceptual actions are carried out simultaneously: one is to recognize the object and the other is to record the grasp pose. Finally, the object model and the corresponding grasp pose are saved as a grasp example.
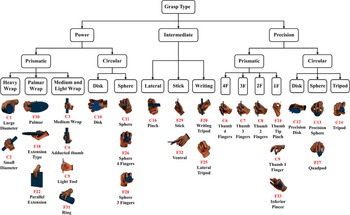
In daily life, the human hand can easily grasp objects of various shapes and sizes. However, the complexity and versatility of the human hand make the classification of grasp challenging. In general, the human hand has 24 DOFs, and each DOF is not independent. Cutkosky [Reference Cutkosky and Wright41, Reference Cutkosky55] conducted a detailed classification study on the manual grasp of the target object and divided it into 16 grasp types. Subsequently, Kjellström et al. [Reference Kjellstrom, Romero and Kragic56] proposed a vision-based grasp classification method based on this classification method, established a mapping relationship between manual grasp and robot grasp, and stored the mapping relationship into a locality-sensitive hashing (LSH). It is shown that good grasp results can be achieved by using LSH to retrieve the robot pre-grasp pose, which corresponds to a certain manual grasp type. Feix et al. [Reference Feix, Romero, Schmiedmayer, Dollar and Kragic57] referred to the classification method in ref. [Reference Cutkosky55] and classified each grasp into three categories according to the precision or power of the manipulator when grasping objects: power grasp, intermediate grasp, and precision grasp. Then, they further extended the taxonomy based on the number of fingers in contact with the object and the position of the thumb. At last, 33 unique prehensile grasp types were extracted. Subsequently, Cini et al. [Reference Cini, Ortenzi, Corke and Controzzi58] optimized the taxonomies in refs. [Reference Cutkosky55] and [Reference Feix, Romero, Schmiedmayer, Dollar and Kragic57] according to the shape of the object and the hand joints used in grasping, finally classified the manual grasp into three major categories and 15 subcategories with a total of 28 grasp types, as shown in Fig. 9.

Figure 9. Classification method of grasp in ref. [Reference Cini, Ortenzi, Corke and Controzzi58]. There are three top-level categories: power, intermediate, and precision grasps. Power and precision grasps are both subdivided into prismatic and circular types. According to further classification at a higher level of detail, 15 categories and a total of 28 grasp types are finally obtained (in Fig. 9, the images numbered C are from ref. [Reference Cutkosky55], and the images numbered F are from ref. [Reference Feix, Romero, Schmiedmayer, Dollar and Kragic57]).
The classification of grasp types has been used in human demonstration [Reference Feix, Romero, Schmiedmayer, Dollar and Kragic57], where the human action is to be imitated by a robot, as well as an intermediate functional layer mapping human hand grasp kinematics to artificial hands [Reference Kang and Ikeuchi59]. Balasubramanian et al. [Reference Balasubramanian, Xu, Brook, Smith and Matsuoka60] guided the robot to produce different grasp poses through the physical interaction between the human hand and the robotic arm and recorded these poses. By comparing the grasp poses generated by manual guidance and the grasp poses independently generated by the robot, it is found that they are similar in grasp effect, but the former has better stability. Ekvall et al. [Reference Ekvall and Kragic61] proposed a grasp pose generation method based on shape primitives and manual demonstration, as shown in Fig. 10, where the demonstrator wears a data glove, which is used to collect the motion data of the human hand when grasping the target object. After that, the whole grasp process is mapped to the 3D space. By collecting a large amount of data, the robot can learn the grasp habits of human beings and finally complete the grasp operation. The experimental results [Reference Ekvall and Kragic62, Reference Ekvall and Kragic63] show that when the number of objects in the grasp space is 5, the grasping success rate of this method is about 100%. When the number is 10, the grasping success rate is about 96%.

Figure 10. The robot is guided to grasp by manual demonstration. Left: The human is moving a box. The system recognizes which object has been moved and chooses an appropriate grasp. Right: The robot grasps the same object using the mapped version of the recognized grasp (the images in Fig. 10 are from ref. [Reference Ekvall and Kragic61]).
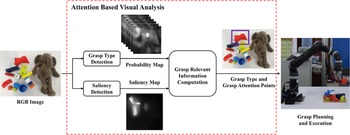
In order to better learn the experience of human hands, it is necessary to understand the deep meaning and mechanism of human operation. Lin et al. [Reference Lin and Sun64] considered that the position of the thumb and the grasp type of the human hand are two key characteristics of human hand grasping. Based on these two critical features, they proposed a grasping strategy based on human demonstration learning. By extracting these features from human grasp demonstrations and integrating them into the grasp planning process, a feasible grasp for target objects was generated. This strategy is applied to the simulation and real robot system to grasp many common objects in life, and the effectiveness of the algorithm is verified. Deng et al. [Reference Deng, Gao, Frintrop, Sun, Zhang and Zhang65] built a visual analysis framework based on an attention mechanism for robot grasp operations, as shown in Fig. 11. The framework takes the RGB image containing the target object and scene as input, then use the computational visual attention model to select the regions of interest (ROI) in the RGB image and use the deep convolutional neural network (CNN) to detect the grasp types and key points of the target object which are contained in the ROI, as the basis for the execution of the grasp operation.

Figure 11. The attention-based visual analysis framework proposed in ref. [Reference Deng, Gao, Frintrop, Sun, Zhang and Zhang65]. Using RGB images as input, the ROI was selected using the saliency map generated by a saliency detection model. Inside the ROI, the grasp type and grasp attention points were calculated according to six probability maps produced by the grasp-type detection network. The robot is guided to grasp according to the obtained grasp type and grasp attention points.
4.1.3. Trial-and-error methods
This kind of method considers that the grasp pose of the target object is not constant but needs to be improved by continuous debugging and repeated trials. Specifically, according to the type or shape of the object, a new grasp pose is generated or selected in the grasp experience database, and the robot is controlled to complete the grasp operation and evaluate the grasp performance. Finally, the database is updated according to the evaluation results.
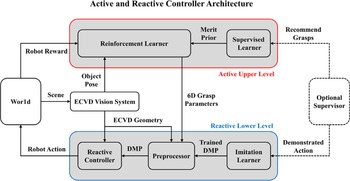
In essence, the trial-and-error method is a process of continuous learning of the existing grasp poses of the known objects. According to this, Detry et al. [Reference Detry, Kraft, Kroemer, Bodenhagen, Peters, Krüger and Piater66] proposed a probabilistic method for learning and representing the grasping ability of objects. This method uses the grasp density to build the grasp affordances model of objects and connects the grasp pose of the target object with the probability of successful grasping. By controlling the robot to repeatedly complete the grasp operation for an object, it can constantly learn and update the obtained grasp pose. When a relative optimal solution is obtained, the kernel density estimation (KDE) [Reference Dehnad67] is used to convert it into a grasp density. The experimental results show that the robot can effectively select the grasp method with the highest probability of successful grasp in most cases, even when the external environment is complex or the target objects are placed irregularly. Kroemer et al. [Reference Kroemer, Detry, Piater and Peters68] proposed a hierarchical control architecture for the problems of “how to determine the location of the grasping object” and “how to perform the grasping operation,” as shown in Fig. 12. The controller consists of an upper level based on reinforcement learning and a lower level based on reactive control, where the upper level decides the location of the grasped object and the lower level decides how to execute the grasp operation. The generated grasp operation will be fed back to the upper level in real time for the reward function calculation, and an ideal experimental effect is obtained.

Figure 12. The controller architecture proposed in ref. [Reference Kroemer, Detry, Piater and Peters68]. The controller consists of an upper level based on reinforcement learning and a lower level based on reactive control. Both levels are supported by supervised or imitation learning. The world and supervisor are external elements of the system.
However, applying model-free direct reinforcement learning to practical grasp operations remains extremely challenging. The papers [Reference Kober, Oztop and Peters69–Reference Stulp, Theodorou, Buchli and Schaal72] illustrate several reasons for this.
-
1. Usually, the grasp operation involves physical contact, and the transition from noncontact to contact leads to discontinuities in the cost function. Furthermore, using reinforcement learning to compute the discontinuous cost function can cause large errors and low learning speed [Reference Kober, Oztop and Peters69, Reference Theodorou, Buchli and Schaal70].
-
2. In the actual grasping, the end point of the movement should adapt to the pose and shape of the goal. However, direct reinforcement learning has only been applied to learning the path of the movement, not the end point [Reference Stulp, Theodorou, Kalakrishnan, Pastor, Righetti and Schaal71].
-
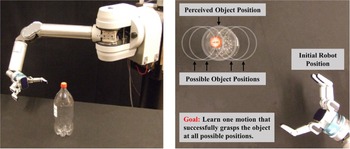
3. If the robot can complete the grasp operation at the expected position, then using reinforcement learning for learning can achieve good results. However, the the object’s actual position may deviate from the expected position for some reasons (as shown in Fig. 13). Then it requires considering all possible positions of the target object and finding a grasp pose in these positions that could maximize the expectation of successfully grasping the object [Reference Stulp, Theodorou, Buchli and Schaal72]. Therefore, it is necessary to use reinforcement learning based on the shape and goal to learn to maximize this expectation in order to generate motion primitives that are robust to object position uncertainty.
Stulp et al. [Reference Stulp, Theodorou, Kalakrishnan, Pastor, Righetti and Schaal71] proposed a simple, efficient, and object model-independent reinforcement learning algorithm named Policy Improvement with Path Integrals (
 $PI^{2}$
). This algorithm can learn both the shape and goal of the motion primitive. When the object’s pose is uncertain, the learning of shape and goal can be used to obtain motion primitives with higher robustness. Experimental studies show that after learning with the
$PI^{2}$
). This algorithm can learn both the shape and goal of the motion primitive. When the object’s pose is uncertain, the learning of shape and goal can be used to obtain motion primitives with higher robustness. Experimental studies show that after learning with the
 $PI^{2}$
, the robot can successfully grasp all the perceived objects in the 40 cm × 30 cm area of the table (the position of the objects is uncertain).
$PI^{2}$
, the robot can successfully grasp all the perceived objects in the 40 cm × 30 cm area of the table (the position of the objects is uncertain).

Figure 13. Left: The manipulation platform used in ref. [Reference Stulp, Theodorou, Kalakrishnan, Pastor, Righetti and Schaal71]. Right: The
 $PI^{2}$
algorithm is used to learn the goal and shape of a motion primitive, to obtain a motion that can grasp the object in all possible positions.
$PI^{2}$
algorithm is used to learn the goal and shape of a motion primitive, to obtain a motion that can grasp the object in all possible positions.
The above is an introduction to the grasping detection technology of the known 3D model. Although these methods have high accuracy, they still have certain limitations on how to build accurate 3D models of objects and how to adapt to grasp in different environments. On the one hand, it is often difficult to obtain an accurate 3D model of the object in practice, and the process requires a lot of time to sample and model the object’s data. On the other hand, the grasp detection for a known 3D model has great limitations in the practical application, and it is unsuitable for use in the unstructured environment with a wide variety of objects.
4.2. Grasp detection of unknown objects
An unknown object usually has an uncertain physical model and no prior grasping experience. Different from grasping a known object, when the robot grasps an unknown object, it needs to compare the unknown object with the previously grasped object and estimate the grasp pose of the object through relevant methods. In this paper, the grasp detection technology of unknown objects is divided into two categories: perception-based and learning-based methods, which will be introduced in the following sections.
4.2.1. Perception-based methods
In the actual grasp process of unknown objects, the robot can only perceive part of the information from the outside world, such as RGB and depth information. Therefore, the robot needs to use incomplete information to generate a good grasp pose. Perception-based approaches focus on identifying structures or features in the data to generate and evaluate grasp candidates. By referring to the relevant paper, there are mainly two ways to generate grasp poses through perception.
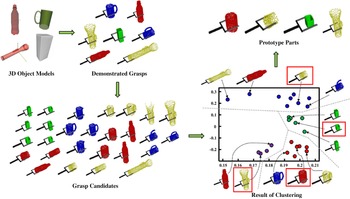
The first is to extract the 3D or 2D features from the segmented point cloud or image data and then perform the grasp detection heuristically based on these features. Dunes et al. [Reference Dune, Marchand, Collowet and Leroux73] sampled the contour features of objects from multiple angles and generated a 2D curve according to the sample points. Then the contour of objects was estimated through the quadratic curve. Finally, the robot’s grasp direction and configuration are inferred by the long axis and center of mass of the curve. Detry et al. [Reference Detry, Ek, Madry, Piater and Kragic74] proposed a grasp strategy transfer method, which generated candidate objects by extracting fragments of the target point cloud, then clustered the generated candidates through nonlinear reduction and unsupervised learning algorithm, and finally selected the center of clustering as the newly generated grasp prototype to grasp new objects. The whole process is shown in Fig. 14.

Figure 14. The generalizing grasp strategies proposed in ref. [Reference Detry, Ek, Madry, Piater and Kragic74]. In the experimental data, three of the objects are cylinders of different sizes, and one is a cuboid. According to the four kinds of objects, seven grasps are demonstrated, and 27 grasp candidates are computed. By clustering the grasp candidates, the central elements of the clusters are selected as the prototype parts for grasping new objects (the images in Fig. 14 are from ref. [Reference Detry, Ek, Madry, Piater and Kragic74]).
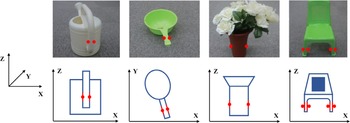
In the process of heuristic grasping based on the extracted features, some researchers also pay attention to the grasping robustness and efficiency. Hsiao et al. [Reference Hsiao, Chitta, Ciocarlie and Jones75] proposed a simple but robust reactive adjustment approach for grasping unknown objects, which acquires the target point cloud in the scene by a 3D sensor and calculates the bounding box of the point cloud using principal component analysis (PCA) algorithm, then generates the grasp candidates using a heuristic method based on the overall shape and local features of the target, and finds the optimal grasp result by using a feature weight table (such as the number of point clouds in the bounding box, whether to grasp at the boundary, the distance between the fingertips and the object center along the approach direction, etc.). Finally, the tactile sensor on the robot’s end effector is used for real-time monitoring of the grasp. When the shape or position of the object is uncertain, it can be corrected in time to obtain a robust grasp. Liu et al. [Reference Liu, Gueta and Ota76] proposed a method to quickly grasp unknown objects. By installing a 2D depth sensor on the robot, partial shape information of unknown objects was obtained, and then features were extracted from the partial shape information to determine the grasp candidate points of unknown objects (as shown in Fig. 15). At last, the feasibility of the grasp candidate points is judged by checking whether the robot can grasp and lift the object successfully. This method does not need to acquire and process all the target information and can reduce the grasp time. Relevant experimental results also verify the feasibility of this algorithm.

Figure 15. Objects for robotic grasp used in ref. [Reference Liu, Gueta and Ota76]. Top row: Every object has parallel surfaces or parallel tangent planes, and the red points are the grasping points of the objects. Bottom row: The 2D shapes of objects are obtained by projecting the 3D models into the XY or XZ plane.
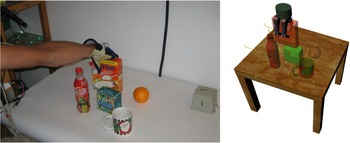
The second is to directly fit or estimate the basic geometry of the object based on the existing segmented results and then to plan the grasp based on the geometric shape. Morales et al. [Reference Morales, Sanz, Del Pobil and Fagg77] used visual feedback information to guide the robot to grasp and proposed an intelligent algorithm for two-finger and three-finger grasping. The algorithm considers the force-closure and contact stability conditions during grasping, and the grasp candidates of the planar objects can be selected directly according to the geometry information. They also used this algorithm to control a Barrett hand to grasp a lot of nonmodeled planar extruded objects and obtained good grasping results. Richtsfeld and Vincze [Reference Richtsfeld and Vincze78] developed a novel vision-based grasp system for unknown objects based on range images and applied it to the grasp of table objects. The system first uses a laser scanner to acquire the point cloud of the scene and preprocess the raw data and then uses the RANSAC algorithm [Reference Fischler and Bolles79] and the 3D Delaunay triangulation algorithm [Reference O’Rourke80] to segment the table and object point clouds, respectively. Finally, 2D Delaunay features of the top surface of the object were obtained, the feature edge points and surface centroid of each object were detected, and the location of the grasp point was determined according to the principle of minimum distance between edge points and surface centroid, as shown in Fig. 16. Bohg et al. [Reference Bohg, Johnson-Roberson, León, Felip, Gratal, Bergström, Kragic and Morales81] proposed a method to estimate the complete object model from a local view by assuming that the target object satisfies the symmetry condition. In this way, the whole 3D model of the target object is estimated by complementing the original 3D point cloud of the object so that the grasping ability can be estimated by using the grasp method of the known object.

Figure 16. Table scene with seven different objects in ref. [Reference Richtsfeld and Vincze78]. Left: The actual models and 3D point clouds of the objects. The green points represent the grasp points, and the red points are the calculated centroids of different top surfaces. Right: Top surfaces of the seven objects. The red and green points represent the same meaning as in the left figure. GP1 is the first grasp point with the shortest distance to the centroid, and GP2 is the second grasp point.
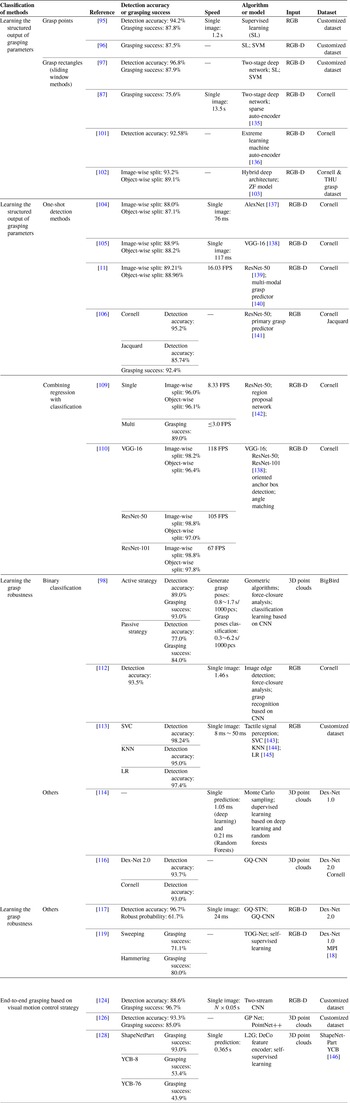
In summary, Table I organizes the methods presented above, mainly including the classification of perception-based grasp detection methods, and the detection results of related methods.
Table I. Summary of perception-based grasp detection methods.

4.2.2. Learning-based methods
At present, machine learning methods have been shown to be applicable to most perception problems [Reference Hinton and Salakhutdinov82–Reference Cai, Liu, Ning, Wang and Xie86], which allow perceptual systems to learn mappings from datasets to various visual properties [Reference Lenz, Lee and Saxena87]. Machine learning-based methods for robot grasp detection are also one of the current research hotspots, which allow robots to better grasp known objects in occluded or stacked environments [Reference Zhang, Zhang, Song, Ma and Li88, Reference Quillen, Jang, Nachum, Finn, Ibarz and Levine89], objects with known systems but uncertain poses [Reference Detry, Kraft, Kroemer, Bodenhagen, Peters, Krüger and Piater66], and objects with completely unknown systems [Reference Pedersen, Misimi and Chaumette90]. In recent years, with the booming development of deep learning in image processing [Reference Socher, Huval, Bath, Manning and Ng84, Reference Qi, Yi, Su and Guibas91, Reference Jiao and Zhao92], more and more researchers have applied deep learning to robotic grasp detection [Reference Caldera, Rassau and Chai17, Reference Levine, Pastor, Krizhevsky, Ibarz and Quillen93], allowing computers to automatically learn high-quality grasp features from large amounts of image data, which has greatly contributed to the development of unknown objects’ grasp detection technology.
For unknown objects, learning-based grasping detection can be divided into two main categories [Reference Caldera, Rassau and Chai17], as shown in Fig. 17. One is the pipeline methods, through the relevant learning algorithm, to generate the grasp pose and then use a separate path planning system to execute the grasp. The other is an end-to-end grasp method based on a visual motion control strategy to map from image data to grasp actions. The first method can be further divided into two categories according to the learning content: one is to learn the structured output of the grasp parameters (such as grasp points and grasp rectangles); the other is to learn the grasp robustness evaluation. The following will focus on Fig. 17 for a detailed introduction.

Figure 17. Classification of learning-based robotic grasp detection methods.
(1) Learning the structured output of grasp parameters
Earlier researchers used the grasp points as a structured output of the grasp parameters. Saxena et al. [Reference Saxena, Driemeyer, Kearns and Ng94, Reference Saxena, Driemeyer and Ng95] used synthetic images as a training dataset to predict the location of the grasp points in 2D images by the supervised learning method. Then, they estimated the grasp pose corresponding to the grasp points by taking 2D images from different viewpoints. The method can complete the recognition of the grasp points within 1.2 s with a detection accuracy rate of 94.2% and a grasping success rate of 87.8%, but the grasp has some limitations because the depth images are not used. Rao et al. [Reference Rao, Le, Phoka, Quigley, Sudsang and Ng96] used 3D data as input and used supervised localization to obtain the graspable segments in the scene, then estimated the target shape using local 3D information and trained the classifier using the SVM algorithm [Reference Cortes, Vapnik and Networks53] with Gaussian radial basis function (RBF) kernel as a way to find a pair of optimal grasp points, and finally obtained a grasping success rate of 87.5%.
The method of using grab points to represent structured output usually has arbitrary support areas (such as the neighborhood centered on these points), which may not match the physical space occupied by the gripper. Therefore, some researchers use the grasp rectangle as the structured output of the grasp parameters, and the most commonly used method to obtain the grasp rectangle is the sliding window method [Reference Lenz, Lee and Saxena87].
Jiang et al. [Reference Jiang, Moseson and Saxena97] proposed a representation of the seven-dimensional grasp rectangle (3D location, 3D orientation, and the gripper opening width), replacing the original representation of grasp points. Lenz et al. [Reference Lenz, Lee and Saxena87] proposed a five-dimensional grasp rectangle based on the seven-dimensional grasp rectangle and designed a two-step cascaded system with two deep networks, as shown in Fig. 18. First, a small CNN is used to find all possible grasping rectangles and eliminate some of the rectangles with low scores. Then, a large CNN is used to find the highest score among the retained grasping rectangles as the optimal result to estimate the grasp pose. The grasping success rate of this method reached 75.6%, but the processing time of a single image reached 13.5 s [Reference Caldera, Rassau and Chai17], indicating that this method requires massive computation.

Figure 18. Two-step cascaded system proposed in ref. [Reference Lenz, Lee and Saxena87]. Input an image of an object to grasp and a small deep network is used to exhaustively search for potential rectangles, producing a small group of top-level rectangles. A more extensive deep network is then used to find the top-ranked rectangle to produce the best grasp for the given object.
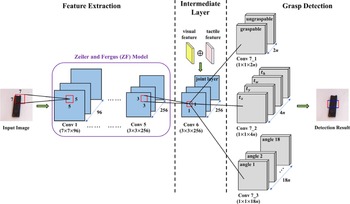
In recent years, due to the gradual development of relevant theories in deep learning, more and more researchers can better apply it to robotic grasp detection to improve the efficiency and accuracy of grasping. Ten Pas et al. [Reference Ten Pas, Gualtieri, Saenko and Platt98, Reference Gualtieri, ten Pas, Saenko and Platt99] designed a novel grasp pose detection (GPD) method that can locate the target object’s position directly from sensor data and does not require estimating the grasp pose. In this method, the noise and partially occluded point cloud were taken as input. Then the obtained point cloud was normalized to extract the 12-channel and 15-channel projection features of the robotic grasp closure region and constructs a CNN-based grasp quality evaluation model to generate feasible grasp poses without assuming the object CAD model. Compared with their previous research results [Reference Ten Pas and Platt100], the success rate of grasping unknown objects in complex environments was improved from 73% to 93%. Wei et al. [Reference Wei, Liu, Yan and Sun101] proposed a multi-modal deep learning architecture for grasp detection. First, an unsupervised hierarchical extreme learning machine (ELM) was used to achieve feature extraction of RGB and depth images, and a shared layer was developed by combining RGB and depth features. Finally, the ELM was used as a supervised feature classifier for the final grasping decision. Guo et al. [Reference Guo, Sun, Liu, Kong, Fang and Xi102] proposed a hybrid deep architecture with a mixture of visual and tactile sensing, which uses visual data (RGB images) as the main input and tactile data as a supplement to assess the grasping stability, as shown in Fig. 19. For feature extraction, they employed the ZF model [Reference Zeiler and Fergus103] to extract features from the input image and used the reference rectangle to identify all possible graspable regions in an image. In the intermediate layer, they concatenated the visual and tactile features as a joint layer. Finally, a 1 × 1 kernel is applied to slide across the joint layer, yielding the grasp detection results.

Figure 19. The architecture of the deep visual network for grasp detection proposed in ref. [Reference Guo, Sun, Liu, Kong, Fang and Xi102]. In grasp detection, there are two classes of labels (graspable and ungraspable) for each reference rectangle,
 $\{t_{x},t_{y},t_{w},t_{h}\}$
are the offset coordinates for the predicted initial grasp rectangle,
$\{t_{x},t_{y},t_{w},t_{h}\}$
are the offset coordinates for the predicted initial grasp rectangle,
 $\{0^{\circ },10^{\circ },\cdots,170^{\circ }\}$
are the 18 labels for the rotation angle, and n is the number of the reference rectangle used in each location.
$\{0^{\circ },10^{\circ },\cdots,170^{\circ }\}$
are the 18 labels for the rotation angle, and n is the number of the reference rectangle used in each location.
Although the sliding window method is simple in principle, it may repeatedly scan the graspable region of the image during the sliding process [Reference Caldera, Rassau and Chai17], resulting in a long processing time. Therefore, the one-shot detection method [Reference Redmon and Angelova104] emerged, which does not require iterative scanning but uses a direct regression method to predict the structured output of the grasp parameters, which improves the real-time performance.
Zhang et al. [Reference Zhang, Qu, Xu and Zou105] focused on the RGB features and depth features of images and proposed a multi-modal fusion method to achieve regression of robotic grasp configuration from RGB-D images. The calculation time of a single image was 117 ms, and the accuracy of image-wise split and object-wise split was 88.90% and 88.20%, respectively. Redmon et al. [Reference Redmon and Angelova104] used a CNN to perform grasp prediction of the complete image of an object, which does not use the standard sliding windows or region proposal networks but performs single-stage regression directly on the grasp rectangle, with a processing speed of 76 ms on the GPU for a single image and a detection accuracy of 88%. In addition, this method can predict multiple grasp poses and classify them by using a locally constrained prediction mechanism. However, it cannot evaluate these grasp poses quantitatively and still has some drawbacks. Using a similar approach, Kumra et al. [Reference Kumra and Kanan11] proposed a novel multi-modal grasp detection system that uses deep CNNs to extract features from images and predict the grasp pose of the target object by shallow CNNs, achieving a detection accuracy of 89.21% on the Cornell dataset and running at 16.03 FPS, it is about 4.8 times faster than the method proposed in ref. [Reference Redmon and Angelova104].
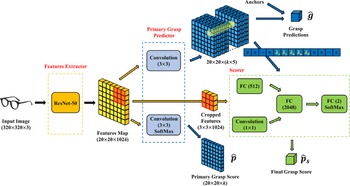
In order to evaluate the structured grasp output more effectively, Depierre et al. [Reference Depierre, Dellandréa and Chen106] used a scorer to score the grasping ability of a certain position in the image. Based on this scorer, an advanced deep neural network (DNN) was extended to connect the regression of grasp parameters with the score of grasp ability (as shown in Fig. 20). The architecture achieves detection accuracies of 95.2% and 85.74% on the Cornell and Jacquard datasets, respectively, and is applied to actual robotic grasp with a grasping success rate of around 92.4%. It is not difficult to find that most of the one-shot detection methods adopt deep transfer learning techniques to use pretrained deeper convolutional networks to predict the grasp candidates from images [Reference Basalla, Ebert, Tebner and Ke107, Reference Watson, Hughes and Iida108] and finally achieve good results.

Figure 20. A state-of-the-art grasp detection architecture proposed in ref. [Reference Depierre, Dellandréa and Chen106]. The architecture takes RGB-D images as input and has three components: the feature extractor, the intermediate grasp predictor, and the scorer network.
Although using direct regression to predict the structured output of the grasp parameter is the mainstream method for one-shot detection, many researchers have combined the classification and regression techniques for one-shot detection in some special cases.
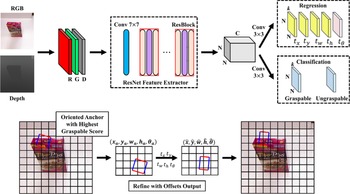
Chu et al. [Reference Chu, Xu and Vela109] transformed the regression problem into a combination of region detection and orientation classification problems, using RGB-D images as the input to a DNN to predict grasp candidates for a single object or multiple objects. This method achieved 96.0% image-wise split accuracy and 96.1% object-wise split accuracy on the Cornell dataset when dealing with a single object. As for dealing with multiple objects, the method has a specific generalization capability and achieves 89.0% grasping success rate when grasping a group of household objects, and the processing time of a single image is less than 0.25 s. Based on ref. [Reference Guo, Sun, Liu, Kong, Fang and Xi102], Zhang et al. [Reference Zhang, Zhou, Lan, Li, Tian and Zheng110] proposed a real-time robotic grasp method based on the fully CNN and used the oriented anchor boxes to predefine the region of the image. As shown in Fig. 21, the network mainly consists of a feature extraction part and a grasp prediction part, and the feature extraction part mainly takes RGB or RGB-D images as input to generate feature mappings for grasp detection. At the same time, the grasp prediction part is divided into a regression layer and a classification layer, which are mainly responsible for regressing grasp rectangles from predefined oriented anchor boxes and classifying these rectangles into graspable and ungraspable parts. The proposed method effectively improved the performance of capture detection and obtained 98.8% image-wise split accuracy and 97.8% object-wise split accuracy in the Cornell dataset, respectively. In the context of GTX 1080Ti, the fastest running speed can reach 118 FPS.

Figure 21. Top: The network architecture based on ResNet-Conv5 proposed in ref. [Reference Zhang, Zhou, Lan, Li, Tian and Zheng110]. The input is an RGD image, and the output includes the regression and classification results. Bottom: The process of using network output to compute the grasp prediction. First, find the oriented anchor box with the highest graspable score according to classification results. Then, the grasp prediction is calculated by the algorithm proposed in the paper.
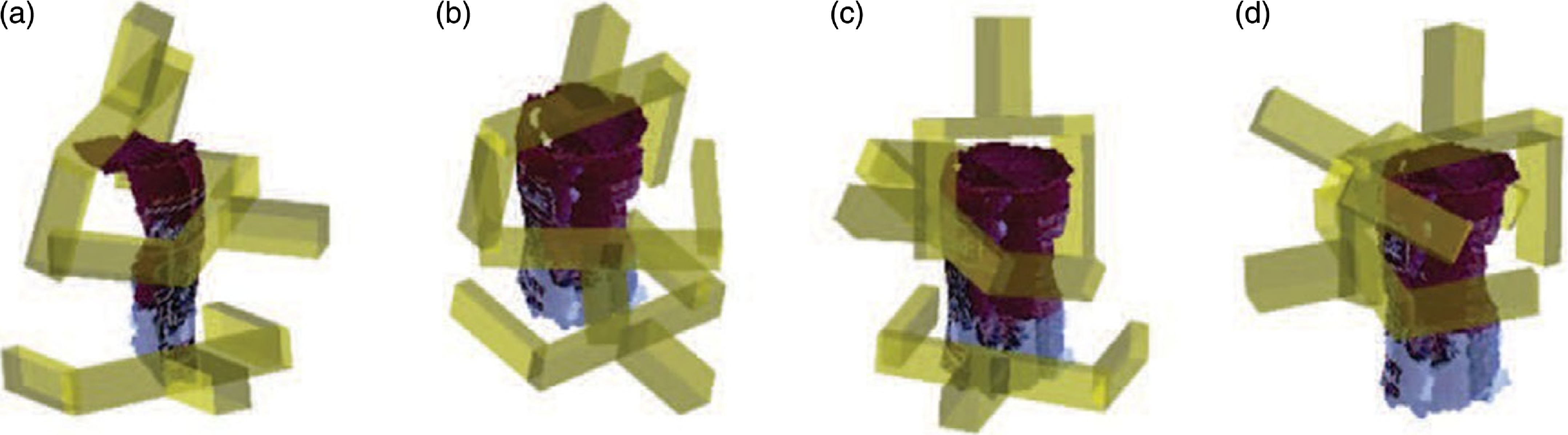
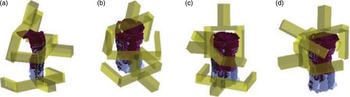
Figure 22. Illustrations of grasp candidates were found using the algorithm proposed in ref. [Reference Ten Pas, Gualtieri, Saenko and Platt98]. Each image shows three examples of a gripper placed at randomly sampled grasp candidate configurations (the figure is from ref. [Reference Ten Pas, Gualtieri, Saenko and Platt98]).
(2) Learning the grasp robustness evaluation
The grasp robustness is mainly used to describe the grasp probability of a certain position or area in the image [Reference Anđelić, Car and Šercer111], and the related grasp robustness function is often used to identify the grasp pose with the highest score as the output. Therefore, learning to grasp robustness evaluation is the core method of many deep grasp detection research. In particular, binary classification [Reference Caldera, Rassau and Chai17, Reference Ten Pas, Gualtieri, Saenko and Platt98, Reference Chen, Huang, Li and Meng112, Reference Li, Sun, Shu, Wang, Wang, Chen and Xue113] is one of the commonly studied methods. It classifies the grasp candidates into valid and invalid poses and then learns and evaluates them based on neural networks and robustness functions to output the best grasp poses. Ten Pas et al. [Reference Ten Pas, Gualtieri, Saenko and Platt98] acquired the target point cloud based on two strategies (active and passive) and optimized them, and then generated a large number of grasp candidates by calculating the geometric features such as curvature and normal of the point cloud (Fig. 22 shows several grasp candidates generated based on this method). Subsequently, they used the end-to-end learning method to perform binary classification on the generated grasp candidates to identify the graspable areas of objects in the complex point cloud scene and finally obtained 89% detection accuracy rate and 93% grasping success rate. Chen et al. [Reference Chen, Huang, Li and Meng112] proposed an edge-based grasp detection strategy, which first used the geometric relationship between edge points to determine the approximate area of grasp candidates. Then, they used binary classification to train a lightweight CNN under a limited number of samples to identify feasible grasps. The method uses only RGB images as input, and the training time for a single image on the CPU is only 1.46 s, with a detection accuracy of 93.5%. Li et al. [Reference Li, Sun, Shu, Wang, Wang, Chen and Xue113] regarded the prediction of grasp stability as a binary classification problem. In order to achieve stable grasping, a training dataset that can reflect the grasp contact force of various objects was constructed by multiple grasp operation feedback from a tactile sensor array. The optimal grasp prediction model under different scenarios was obtained by inputting the training data into different machine learning algorithms.
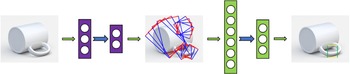
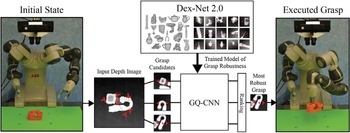
Besides the binary classification methods, many researchers also combined neural networks with supervised learning to obtain a robust grasp. Seita et al. [Reference Seita, Pokorny, Mahler, Kragic, Franklin, Canny and Goldberg114] used the Monte Carlo sampling estimation algorithm to generate test datasets from the Dex-Net 1.0 dataset [Reference Mahler, Pokorny, Hou, Roderick, Laskey, Aubry, Kohlhoff, Kroger, Kuffner and Goldberg115] and then trained them through supervised learning to estimate the grasp robustness based on the mean absolute error (MAE) and area under the curve (AUC) of the dataset. In the process of sampling estimation, they also adopted two supervised learning methods: deep learning and random forest, which increased the training speed by 1500 times and 7500 times, respectively. Mahler et al. [Reference Mahler, Liang, Niyaz, Laskey, Doan, Liu, Aparicio and Goldberg116] regarded the grasp robustness as a scaler probability in the range of [0,1] and synthesized a dataset named Dex-Net 2.0 (as shown in Fig. 23), which included 6.7 million point clouds and related grasp indicators. The dataset was input into a Grasp Quality Convolutional Neural Network (GQ-CNN) for training as a way to predict the robustness of grasping based on point cloud data, and the grasp detection accuracy of this method was around 93.7%, but the training process was very long due to the huge amount of data. Gariépy et al. [Reference Gariépy, Ruel, Chaib-Draa and Giguere117] improved the Spatial Transform Network (STN) [Reference Jaderberg, Simonyan and Zisserman118] and proposed a one-shot detection network: the Spatial Transform Network of Grab Quality (GQ-STN). Then, they use GQ-CNN as a supervisor and train GQ-STN to obtain grasp candidates with high robustness scores. Compared with ref. [Reference Mahler, Liang, Niyaz, Laskey, Doan, Liu, Aparicio and Goldberg116], it obtained a higher grasp detection accuracy (96.7%) and improved the detection speed by more than 60 times.

Figure 23. Dex-Net 2.0 architecture. When performing the grasp operation, a 3D point cloud is obtained with the depth camera, where pairs of antipodal points identify a set of several hundred grasp candidates. Then, GQ-CNN is used to quickly determine the most robust grasp candidate, and the robot will perform the grasp (the figure is from ref. [Reference Mahler, Liang, Niyaz, Laskey, Doan, Liu, Aparicio and Goldberg116]).
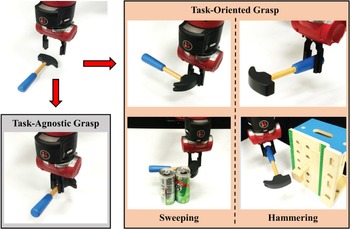
Training a suitable neural network for grasp detection usually requires a large amount of manually labeled data, but this requires even higher volumes of domain-specific data [Reference Quillen, Jang, Nachum, Finn, Ibarz and Levine89]. Therefore, some researchers have opted to collect data with self-supervised methods. Fang et al. [Reference Fang, Zhu, Garg, Kurenkov, Mehta, Fei-Fei and Savarese119] proposed a Task-Oriented Grasping Network (TOG-Net) model, which realized the joint optimization of grasp robustness and subsequent operational tasks through self-supervised learning. Based on this model, they guided the robot to grasp relevant tools and complete actual tasks (sweeping and hammering, as shown in Fig. 24), achieving a success rate of 71.1% and 80.0%, respectively. ŠEGOTA et al. [Reference Šegota, Anđelić, Z. and Šercer120] used the multilayer perceptron (MLP) algorithm to regress the values of grasp robustness from a robotic grasp dataset [121] containing torque, velocity, and position information and finally obtained a high-quality regression model.

Figure 24. For different requirements, the robot has different grasp ways. A task-agnostic grasp can lift a hammer, but it may not be appropriate for particular manipulation tasks, such as sweeping or hammering. According to the method proposed in ref. [Reference Fang, Zhu, Garg, Kurenkov, Mehta, Fei-Fei and Savarese119], the grasp selection can be directly optimized by jointly selecting a task-oriented grasp and subsequent manipulation actions.
(3) The end-to-end grasp based on the visual motion control strategy
The classical machine learning approach is to extract relevant features of the original data and classify them according to the prior knowledge of human beings and then use these features as input to a model for training, which in turn outputs the final result. Usually, the training result depends on the extracted features, so early researchers spent much time on feature extraction. With the development of deep learning, it is often better to use the end-to-end method to let the network model learn by itself and extract the features. Only the original data need to be labeled at the starting stage, and then the original data and the corresponding labels are input into the model for learning to get the final result.
For robotic grasp, end-to-end can be understood as the mapping from image data to the grasp pose. By associating the end-to-end learning method with the visual motion control strategy, the visual motion controller is trained by using deep learning to iteratively correct the grasp points until the robot completes the grasp operation successfully.

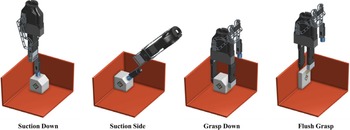
Figure 25. Four motion primitives proposed in ref. [Reference Zeng, Song, Yu, Donlon, Hogan, Bauza, Ma, Taylor, Liu, Romo, Fazeli, Alet, Chavan Dafle, Holladay, Morona, Nair, Green, Taylor, Liu, Funkhouser and Rodriguez124] include suction and grasping to ensure successful picking for a wide variety of objects in any orientation (the figure is from ref. [Reference Zeng, Song, Yu, Donlon, Hogan, Bauza, Ma, Taylor, Liu, Romo, Fazeli, Alet, Chavan Dafle, Holladay, Morona, Nair, Green, Taylor, Liu, Funkhouser and Rodriguez124]).

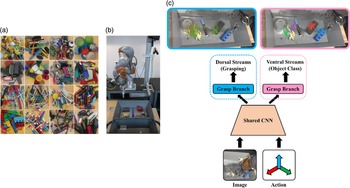
Figure 26. The semantic grasping model proposed in ref. [Reference Jang, Vijayanarasimhan, Pastor, Ibarz and Levine125]. (a) Considering the task of learning to pick up objects from 16 object classes. (b) The robotic arm with a two-finger gripper. (c) A two-stream model that shares model parameters between a grasp branch and a class branch, which comprise the dorsal (blue box) and ventral streams (pink box).
In the earlier work, Zhang et al. [Reference Zhang, Leitner, Milford, Upcroft and Corke122] mapped the grasp operation in the 3D space to the 2D synthetic image and then used the deep Q network (DQN) [Reference Mnih, Kavukcuoglu, Silver, Rusu, Veness, Bellemare, Graves, Riedmiller, Fidjeland, Ostrovski, Petersen, Beattie, Sadik, Antonoglou, King, Kumaran, Wierstra, Legg and Hassabis123] for training to obtain the poses of the robot’s end effector when it reached the target. However, when the authentic images taken by the camera were used as input to the DQN, the probability of successfully reaching the target was only 51%. It can be seen that the learning results in the synthetic scene usually cannot be directly applied to the real environment. In this regard, Zeng et al. [Reference Zeng, Song, Yu, Donlon, Hogan, Bauza, Ma, Taylor, Liu, Romo, Fazeli, Alet, Chavan Dafle, Holladay, Morona, Nair, Green, Taylor, Liu, Funkhouser and Rodriguez124] proposed a visual control method that can identify and grasp objects in a cluttered environment. First, an object-agnostic grasping framework was used to complete the mapping from visual observation to action, and the dense pixel-wise probability maps of the affordances for four different grasping primitive actions (as shown in Fig. 25) were inferred. Then, it executed the grasp with the highest affordance and identified the target object by using the cross-domain image classification framework, which matches observed images to product images without any additional data collection or retraining. The detection accuracy of this method is 88.6%, and the capture success rate is 96.7%. The detection time of a single image is related to the number of graspable angles.
Table II. Summary of learning-based grasp detection methods.

Jang et al. [Reference Jang, Vijayanarasimhan, Pastor, Ibarz and Levine125] focused on robot semantic grasping and proposed an end-to-end learning method. By combining spatial and semantic reasoning into a neural network, the network is divided into ventral and dorsal streams, which are used to classify and select good grasping targets, respectively, as shown in Fig. 26.
Wu et al. [Reference Wu, Chen, Cao, Zhang, Tai, Sun and Jia126] pointed out the shortcomings of heuristic sampling grasp strategies and proposed an end-to-end Grasp Proposal Network (GP Net) for predicting 6-DOF grasps of unknown objects from monocular cameras. With point cloud data as input and PointNet++ [Reference Qi, Yi, Su and Guibas91] as feature encoder, the network constructs the grasp proposal set by connecting the defined grasp anchor with the point cloud successively and then trains the grasp proposal set in terms of antipodal validity [Reference Chen and Burdick127], regress grasp prediction, and score grasp confidence, and finally an ideal result is obtained. Alliegro et al. [Reference Alliegro, Rudorfer, Frattin, Leonardis and Tommasi128] referred to the working mechanism of GP Net and proposed a more efficient end-to-end learning strategy L2G, which is used for the 6-DOF grasp of local target point clouds. The method uses a differentiable sampling strategy to identify visible contact points and a feature encoder [Reference Alliegro, Valsesia, Fracastoro, Magli and Tommasi129] that combines local and global cues for encoding and then generates a grasp set by optimizing contact point sampling, grasp regression, and grasp classification. They used a self-supervised learning method on the ShapeNetPart dataset [Reference Yi, Kim, Ceylan, Shen, Yan, Su, Lu, Huang, Sheffer and Guibas130] to train the generated grasp set, and a grasping success rate of 93.0% with a prediction time of around 0.365 s for a single grasp is achieved. L2G is slightly higher than GP Net in grasping success rate but takes much less time than GP Net and has a certain generalization ability. It is more suitable for large and diversified grasp datasets.

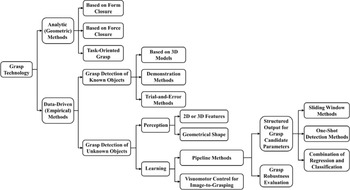
Figure 27. The classification method of robotic grasp detection technology proposed in this review.
After the previous introduction, we can find that early studies [Reference Saxena, Driemeyer, Kearns and Ng94, Reference Saxena, Driemeyer and Ng95] mainly focused on 2D image data and used relevant learning algorithms to detect the grasp points from 2D images to estimate the grasp pose. In this paper, these methods are called 2D grasp detection methods, which usually use ordinary RGB cameras to capture images and do not require additional sensing equipment, and the data acquisition is inexpensive and convenient. In addition, 2D grasp detection has low algorithm complexity and wide application. Due to its early appearance, many research results have been produced [Reference Depierre, Dellandréa and Chen106, Reference Chen, Huang, Li and Meng112, Reference Li, Sun, Shu, Wang, Wang, Chen and Xue113]. However, 2D grasp detection cannot directly obtain the depth information of objects and is more sensitive to the change of illumination and viewing angle. In complex environments (such as occlusion and overlap), the detection effect is usually not ideal. In contrast, 3D data has significantly improved this problem [Reference Saxena, Wong and Ng131]. With the advent of low-cost RGB-D sensors and structured light cameras, using RGB-D or 3D point cloud data in robotic grasp has become more common [Reference Kumra and Kanan11, Reference Wei, Liu, Yan and Sun101, Reference Guo, Sun, Liu, Kong, Fang and Xi102, Reference Redmon and Angelova104, Reference Zhang, Qu, Xu and Zou105, Reference Seita, Pokorny, Mahler, Kragic, Franklin, Canny and Goldberg114, Reference Alliegro, Rudorfer, Frattin, Leonardis and Tommasi128]. Although 3D grasp detection has higher detection accuracy and is more robust in occlusion or overlapping occasions, it also has the characteristics of high computational complexity and cost. Therefore, we need to choose the appropriate method according to the specific application requirements and environments.
Table II summarizes the mentioned methods, including the detection accuracy rate and grasping success rate of the methods, as well as the training datasets and related algorithms used, for the convenience of readers.
5. Conclusion
According to the previous description, current robotic grasp detection techniques can be classified according to Fig. 27. It can be mainly divided into analytic and data-driven methods. Among them, the analytic methods were widely used in early research, but considering the defects of this kind of method (see Section 3.3), it was gradually replaced by the data-driven method.
The data-driven methods can be applied to the grasp detection for known and unknown objects. The grasp detection methods for known objects must require the target object to have a complete 3D model. This kind of method has a simple principle, high detection accuracy, and easy implementation, but it has significant limitations in the complex unstructured environment. Therefore, the grasp detection methods for unknown objects have become a current research hotspot.
The classification of unknown object grasp detection techniques and related methods are shown in Table II, which can be mainly classified into perception-based and learning-based methods. Perception-based methods generate and evaluate grasp candidates by recognizing structures or features in image data, which are usually only for objects of specific shapes, and the detection time and accuracy cannot be guaranteed, so the practical application is limited. Learning-based methods are the focus of current research in robotic grasping. Such methods are not limited to the complexity of the environment and the shape of the target objects and can be divided into two categories: the pipeline methods and end-to-end grasp based on visual motion control strategies. The former can be subdivided according to the learning content into two approaches: learning the structured output of grasp parameters and learning grasp robustness evaluation.
The methods of learning the structured output of grasp parameters do not consider the intermediate steps of grasping and only focuses on the grasp results. Typical strategies include sliding window methods and one-shot detection methods. The sliding window methods have the advantages of simple structure, good detection accuracy, and certain generalization ability. The main limitation is that the optimal solution is obtained by traversal search, so the efficiency is low. It has been improved by using the one-shot detection methods, which mainly adopt the ResNet-based network model and greatly reduce the detection time while ensuring higher accuracy. Although the one-shot detection methods do not require an iterative search, it still consumes a lot of training time when the network model structure is complex and needs to be trained on large datasets. Therefore, how to streamline the network structure while ensuring detection accuracy is the development trend of learning-based robot grasp detection methods. In this regard, several ideas are proposed for the general reader: using lightweight models or sparsely connected deep networks to improve detection speed; maintaining high detection accuracy by adding residual modules to the network; using network pretraining to avoid overfitting, etc.
The methods of learning grasp robustness evaluation are able to observe intermediate steps of grasp detection with high detection accuracy, but the computational process is more complex. In contrast to the one-shot detection method, this kind of method usually consumes a lot of time during detection and spends less time on post-training. Therefore, future research direction can focus on improving the speed of the detection process.
The end-to-end grasp based on visual motion control strategies, which do not require independent configuration for the planning control system, can directly realize the mapping from images to grasp actions. A more representative strategy is to apply reinforcement learning to the method without pre-labeling the dataset, but this approach will dramatically increase the training time. Therefore, further work is needed to develop more time-efficient methods.
5.1. Future work
Since this review focuses on data-driven methods, the discussion of future research directions is also based on this. In the future, robots may be used more to grasp unknown objects in unstructured environments, which is a great test for robotic grasp detection technology. In recent years, there have been significant advances in robotic grasp detection, particularly in machine learning and computer vision. However, there are still several challenges that need to be addressed to improve the performance and robustness of robotic grasp detection systems. Some of the future research directions in this field include
-
1. Learning-based approaches. One of the key research areas in robotic grasp detection is the development of learning-based methods to improve the accuracy and efficiency of grasp detection. Deep learning techniques such as CNNs and recurrent neural networks (RNNs) have shown promise in this regard, and further research is needed to explore the potential of these techniques.
-
2. Processing of large datasets. The training of grasp detection networks usually requires a large amount of manually labelled data, which is not readily available. At present, supervised learning has been used to collect data, but there are still some drawbacks. In the future, self-supervised learning will be more applied to data acquisition, and domain adaptation techniques [Reference Farahani, Voghoei, Rasheed and Arabnia132, Reference Wang and Deng133] may be applied to generate application-specific datasets from 3D simulations. In addition, very few researchers have autonomously created larger datasets by incorporating reinforcement learning techniques, which is also a potential research direction.
-
3. Transfer learning. By using pretrained models and transfer learning techniques, it is possible to improve the performance of the grasp detection system with limited training data.
-
4. Multi-modal sensing. Another important research direction is the integration of multiple sensing modalities such as vision, touch, and force sensing to improve the accuracy and reliability of grasp detection. Multi-modal sensing can provide additional information about the object and its properties, which can be used to improve the grasp detection algorithm.
-
5. Real-time performance. This is a critical requirement for robotic systems that interact with the environment. Future research in robotic grasp detection should focus on developing algorithms and techniques that can operate in real time and provide reliable and efficient grasp detection in unstructured environments.
Overall, future research directions in robotic grasp detection are focused on improving the accuracy, reliability, and efficiency of grasp detection systems, as well as developing algorithms and techniques that can operate in real time and in unstructured environments.
Author contributions
Author Minglun Dong was responsible for the conception, literature review, writing and typesetting of the review paper. Author Jian Zhang is responsible for the improvement and modification of the content.
Financial support
This work was supported by the National Key R&D Program of China (No.2018YFB1308400).
Competing interests
The authors declare no competing interests exist.
Ethical approval
Not applicable.