


1 Introduction
Notation3 Logic (
 $N_3$
) is an extension of the Resource Description Framework (RDF) which allows the user to quote graphs, to express rules, and to apply built-in functions on the components of RDF triples (Woensel et al. Reference Woensel, Arndt, Champin, Tomaszuk and Kellogg2023; Berners-Lee et al. Reference Berners-Lee, Connolly, Kagal, Scharf and Hendler2008). Facilitated by reasoners like cwm (Berners-Lee Reference Berners-Lee2009), Data-Fu (Harth and Käfer Reference Harth and Käfer2018), or EYE (Verborgh and De Roo Reference Verborgh and De roo2015),
$N_3$
) is an extension of the Resource Description Framework (RDF) which allows the user to quote graphs, to express rules, and to apply built-in functions on the components of RDF triples (Woensel et al. Reference Woensel, Arndt, Champin, Tomaszuk and Kellogg2023; Berners-Lee et al. Reference Berners-Lee, Connolly, Kagal, Scharf and Hendler2008). Facilitated by reasoners like cwm (Berners-Lee Reference Berners-Lee2009), Data-Fu (Harth and Käfer Reference Harth and Käfer2018), or EYE (Verborgh and De Roo Reference Verborgh and De roo2015),
 $N_3$
rules directly consume and produce RDF graphs. This makes
$N_3$
rules directly consume and produce RDF graphs. This makes
 $N_3$
well-suited for rule exchange on the Web.
$N_3$
well-suited for rule exchange on the Web.
 $N_3$
supports the introduction of new blank nodes through rules, that is, if a blank node appears in the headFootnote
1
of a rule, each new match for the rule body produces a new instance of the rule’s head containing fresh blank nodes. This feature is interesting for many use cases – mappings between different vocabularies include blank nodes, workflow composition deals with unknown existing instances (Verborgh et al. Reference Verborgh, Arndt, Van hoecke, De roo, Mels, Steiner and Gabarró2017) – but it also impedes reasoning tasks: from a logical point of view these rules contain existentially quantified variables in their heads. Reasoning with such rules is known to be undecidable in general and very complex on decidable cases (Baget et al. Reference Baget, Leclère, Mugnier and Salvat2011; Krötzsch et al. Reference Krötzsch, Marx, Rudolph, Barceló and Calautti2019).
$N_3$
supports the introduction of new blank nodes through rules, that is, if a blank node appears in the headFootnote
1
of a rule, each new match for the rule body produces a new instance of the rule’s head containing fresh blank nodes. This feature is interesting for many use cases – mappings between different vocabularies include blank nodes, workflow composition deals with unknown existing instances (Verborgh et al. Reference Verborgh, Arndt, Van hoecke, De roo, Mels, Steiner and Gabarró2017) – but it also impedes reasoning tasks: from a logical point of view these rules contain existentially quantified variables in their heads. Reasoning with such rules is known to be undecidable in general and very complex on decidable cases (Baget et al. Reference Baget, Leclère, Mugnier and Salvat2011; Krötzsch et al. Reference Krötzsch, Marx, Rudolph, Barceló and Calautti2019).
Even though recent projects like jen3Footnote
2
or RoXi (Bonte and Ongenae Reference Bonte and Ongenae2023) aim at improving the situation, the number of fast
 $N_3$
reasoners fully supporting blank node introduction is low. This is different for reasoners acting on existential rules, a concept very similar to blank-node-producing rules in
$N_3$
reasoners fully supporting blank node introduction is low. This is different for reasoners acting on existential rules, a concept very similar to blank-node-producing rules in
 $N_3$
, but developed for databases. Sometimes it is necessary to uniquely identify data by a value that is not already part of the target database. One tool to achieve that are labeled nulls which – just as blank nodes – indicate the existence of a value. This problem from databases and the observation that rules may provide a powerful, yet declarative, means of computing has led to more extensive studies of existential rules (Baget et al. Reference Baget, Leclère, Mugnier and Salvat2011; Calì et al. Reference Calì, Gottlob, Pieris, Hitzler and Lukasiewicz2010). Many reasoners like for example VLog (Carral et al. Reference Carral, Dragoste, González, Jacobs, Krötzsch, Urbani and Ghidini2019) or Nemo (Ivliev et al. Reference Ivliev, Ellmauthaler, Gerlach, Marx, Meissner, Meusel, Krötzsch, Pontelli, Costantini, Dodaro, Gaggl, Calegari, d’Avila Garcez, Fabiano, Mileo, Russo and Toni2023) apply dedicated strategies to optimize reasoning with existential rules.
$N_3$
, but developed for databases. Sometimes it is necessary to uniquely identify data by a value that is not already part of the target database. One tool to achieve that are labeled nulls which – just as blank nodes – indicate the existence of a value. This problem from databases and the observation that rules may provide a powerful, yet declarative, means of computing has led to more extensive studies of existential rules (Baget et al. Reference Baget, Leclère, Mugnier and Salvat2011; Calì et al. Reference Calì, Gottlob, Pieris, Hitzler and Lukasiewicz2010). Many reasoners like for example VLog (Carral et al. Reference Carral, Dragoste, González, Jacobs, Krötzsch, Urbani and Ghidini2019) or Nemo (Ivliev et al. Reference Ivliev, Ellmauthaler, Gerlach, Marx, Meissner, Meusel, Krötzsch, Pontelli, Costantini, Dodaro, Gaggl, Calegari, d’Avila Garcez, Fabiano, Mileo, Russo and Toni2023) apply dedicated strategies to optimize reasoning with existential rules.
This paper aims to make existing and future optimizations on existential rules usable in the Semantic Web. We introduce a subset of
 $N_3$
supporting existential quantification but ignoring features of the language not covered in existential rules, like for example built-in functions or lists. We provide a mapping between this logic and existential rules: The mapping and its inverse both preserve equivalences of formulae, enabling
$N_3$
supporting existential quantification but ignoring features of the language not covered in existential rules, like for example built-in functions or lists. We provide a mapping between this logic and existential rules: The mapping and its inverse both preserve equivalences of formulae, enabling
 $N_3$
reasoning via existential rule technologies. We discuss how the framework can be extended to also support lists – a feature of
$N_3$
reasoning via existential rule technologies. We discuss how the framework can be extended to also support lists – a feature of
 $N_3$
used in many practical applications, for example to support n-ary predicates. We implement the defined mapping in python and compare the reasoning performance of the existential rule reasoners Vlog and Nemo, and the
$N_3$
used in many practical applications, for example to support n-ary predicates. We implement the defined mapping in python and compare the reasoning performance of the existential rule reasoners Vlog and Nemo, and the
 $N_3$
reasoners EYE and cwm for two benchmarks: one applying a fixed set of rules on a varying size of facts, and one applying a varying set of highly dependent rules to a fixed set of facts. In our tests VLog and Nemo together with our mapping outperform the traditional
$N_3$
reasoners EYE and cwm for two benchmarks: one applying a fixed set of rules on a varying size of facts, and one applying a varying set of highly dependent rules to a fixed set of facts. In our tests VLog and Nemo together with our mapping outperform the traditional
 $N_3$
reasoners EYE and cwm when dealing with a high number of facts while EYE is the fastest on large dependent rule sets. This is a strong indication that our implementation will be of practical use when extended by further features.
$N_3$
reasoners EYE and cwm when dealing with a high number of facts while EYE is the fastest on large dependent rule sets. This is a strong indication that our implementation will be of practical use when extended by further features.
We motivate our approach by providing examples of
 $N_3$
and existential rule formulae, and discuss how these are connected, in Section 2. In Section 3 we provide a more formal definition of Existential
$N_3$
and existential rule formulae, and discuss how these are connected, in Section 2. In Section 3 we provide a more formal definition of Existential
 $N_3$
(
$N_3$
(
 ${N_3}^\exists$
), introduce its semantics and discuss its properties. We then formally introduce existential rules, provide the mapping from
${N_3}^\exists$
), introduce its semantics and discuss its properties. We then formally introduce existential rules, provide the mapping from
 ${N_3}^\exists$
into this logic, and prove its truth-preserving properties in Section 4.
${N_3}^\exists$
into this logic, and prove its truth-preserving properties in Section 4.
 $N_3$
lists and the built-ins associated with them are introduced as
$N_3$
lists and the built-ins associated with them are introduced as
 $N_3$
primitives as well as their existential rule translations are subject to Section 5. In Section 6 we discuss our implementation and provide an evaluation of the different reasoners. Related work is presented in Section 7. We conclude our discussion in Section 8. Furthermore, the code needed for reproducing our experiments is available on GitHub (https://github.com/smennicke/n32rules).
$N_3$
primitives as well as their existential rule translations are subject to Section 5. In Section 6 we discuss our implementation and provide an evaluation of the different reasoners. Related work is presented in Section 7. We conclude our discussion in Section 8. Furthermore, the code needed for reproducing our experiments is available on GitHub (https://github.com/smennicke/n32rules).
This article is an extended and revised version of our work (Arndt and Mennicke Reference Arndt, Mennicke, Fensel, Ozaki, Roman and Soylu2023a) presented at Rules and Reasoning – 7th International Joint Conference (RuleML+RR) 2023. Compared to the conference paper, we include full proofs to all theorems and lemmas. Furthermore, we strengthen the statements of correctness of our translation (Theorem4.3 in Section 4), imposing stronger guarantees with effectively the same proofs as we had for the conference version, back then included in the technical appendix (Arndt and Mennicke Reference Arndt and Mennicke2023b) only. A discussion about the particular difference is appended to Theorem4.3. Finally, we extend our considerations by
 $N_3$
lists and respective built-ins (cf. Section 5).
$N_3$
lists and respective built-ins (cf. Section 5).
2 Motivation
 $N_3$
has been inroduced as a rule-based extension of RDF. As in RDF,
$N_3$
has been inroduced as a rule-based extension of RDF. As in RDF,
 $N_3$
knowledge is stated in triples consisting of subject, predicate, and object. In ground triples these can either be Internationalized Resource Identifiers (IRIs) or literals. The expression
$N_3$
knowledge is stated in triples consisting of subject, predicate, and object. In ground triples these can either be Internationalized Resource Identifiers (IRIs) or literals. The expression
 \begin{equation} \mathtt {:lucy\;\;:knows\;\;:tom.} \end{equation}
\begin{equation} \mathtt {:lucy\;\;:knows\;\;:tom.} \end{equation}
meansFootnote
3
that “lucy knows tom.” Sets of triples are interpreted as their conjunction. Like RDF,
 $N_3$
supports blank nodes, usually starting with _:, which stand for (implicitly) existentially quantified variables. The statement
$N_3$
supports blank nodes, usually starting with _:, which stand for (implicitly) existentially quantified variables. The statement
 \begin{equation} \mathtt {:lucy\;\;:knows\;\;\_:x.} \end{equation}
\begin{equation} \mathtt {:lucy\;\;:knows\;\;\_:x.} \end{equation}
means “there exists someone who is known by lucy.”
 $N_3$
furthermore supports implicitly universally quantified variables, indicated by a leading question mark (?), and implications which are stated using graphs, i.e., sets of triples, surrounded by curly braces ({}) as body and head connected via an arrow (= >). The formula
$N_3$
furthermore supports implicitly universally quantified variables, indicated by a leading question mark (?), and implications which are stated using graphs, i.e., sets of triples, surrounded by curly braces ({}) as body and head connected via an arrow (= >). The formula
 \begin{equation} \mathtt {\{:lucy\;\;:knows\;\;?x\}= \gt \{?x\;\;:knows\;\;:lucy\}.} \end{equation}
\begin{equation} \mathtt {\{:lucy\;\;:knows\;\;?x\}= \gt \{?x\;\;:knows\;\;:lucy\}.} \end{equation}
means that “everyone known by Lucy also knows her.” Furthermore,
 $N_3$
allows the use of blank nodes in rules. These blank nodes are not quantified outside the rule like the universal variables, but in the rule part they occur in, that is either in its body or its head.
$N_3$
allows the use of blank nodes in rules. These blank nodes are not quantified outside the rule like the universal variables, but in the rule part they occur in, that is either in its body or its head.
 \begin{equation} \mathtt {\{?x\;\;:knows\;\;:tom\}= \gt \{?x\;\;:knows\;\;\_:y.\;\;\_:y\;\;:name\;\;"Tom"\}.} \end{equation}
\begin{equation} \mathtt {\{?x\;\;:knows\;\;:tom\}= \gt \{?x\;\;:knows\;\;\_:y.\;\;\_:y\;\;:name\;\;"Tom"\}.} \end{equation}
means “everyone knowing Tom knows someone whose name is Tom.”
This last example shows, that
 $N_3$
supports rules concluding the existence of certain terms which makes it easy to express them as existential rules. An existential rule is a first-order sentence of the form
$N_3$
supports rules concluding the existence of certain terms which makes it easy to express them as existential rules. An existential rule is a first-order sentence of the form
 \begin{equation} \forall \mathbf{x}, \mathbf{y} .\,\varphi [\mathbf{x}, \mathbf{y}] \rightarrow \exists \mathbf{z} .\,\psi [\mathbf{y}, \mathbf{z}] \end{equation}
\begin{equation} \forall \mathbf{x}, \mathbf{y} .\,\varphi [\mathbf{x}, \mathbf{y}] \rightarrow \exists \mathbf{z} .\,\psi [\mathbf{y}, \mathbf{z}] \end{equation}
where
 $\mathbf{x}, \mathbf{y}, \mathbf{z}$
are mutually disjoint lists of variables,
$\mathbf{x}, \mathbf{y}, \mathbf{z}$
are mutually disjoint lists of variables,
 $\varphi$
and
$\varphi$
and
 $\psi$
are conjunctions of atoms using only variables from the given lists, and
$\psi$
are conjunctions of atoms using only variables from the given lists, and
 $\varphi$
is referred to as the body of the rule while
$\varphi$
is referred to as the body of the rule while
 $\psi$
is called the head. Using the basic syntactic shape of (5) we go through all the example
$\psi$
is called the head. Using the basic syntactic shape of (5) we go through all the example
 $N_3$
formulae (1)–(4) again and represent them as existential rules. To allow for the full flexibility of
$N_3$
formulae (1)–(4) again and represent them as existential rules. To allow for the full flexibility of
 $N_3$
and RDF triples, we translate each RDF triple, just like the one in (1) into a first-order atom
$N_3$
and RDF triples, we translate each RDF triple, just like the one in (1) into a first-order atom
 ${\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, \mathtt {:tom})$
. Here,
${\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, \mathtt {:tom})$
. Here,
 $\textit {tr}$
is a ternary predicate holding subject, predicate, and object of a given RDF triple. This standard translation makes triple predicates (e.g.,
$\textit {tr}$
is a ternary predicate holding subject, predicate, and object of a given RDF triple. This standard translation makes triple predicates (e.g.,
 $\mathtt {:knows}$
) accessible as terms. First-order atoms are also known as facts, finite sets of facts are called databases, and (possibly infinite) sets of facts are called instances. Existential rules are evaluated over instances (cf. Section 4).
$\mathtt {:knows}$
) accessible as terms. First-order atoms are also known as facts, finite sets of facts are called databases, and (possibly infinite) sets of facts are called instances. Existential rules are evaluated over instances (cf. Section 4).
Compared to other rule languages, the distinguishing feature of existential rules is the use of existentially quantified variables in the head of rules (cf.
 $\mathbf{z}$
in (5)). The
$\mathbf{z}$
in (5)). The
 $N_3$
formula in (2) contains an existentially quantified variable and can, thus, be encoded as
$N_3$
formula in (2) contains an existentially quantified variable and can, thus, be encoded as
 \begin{equation} \rightarrow \exists x.\ {\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, x) \end{equation}
\begin{equation} \rightarrow \exists x.\ {\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, x) \end{equation}
Rule (6) has an empty body, which means the head is unconditionally true. Rule (6) is satisfied on instances containing any fact
 ${\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\_)$
(e.g.,
${\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\_)$
(e.g.,
 ${\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\mathtt {:tim})$
so that variable
${\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\mathtt {:tim})$
so that variable
 $x$
can be bound to
$x$
can be bound to
 $\mathtt {:tim}$
).
$\mathtt {:tim}$
).
The implication of (3) has
 \begin{equation} \forall x .\ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},x) \rightarrow {\textit {tr}}(x, \mathtt {:knows}, \mathtt {:lucy}) \end{equation}
\begin{equation} \forall x .\ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},x) \rightarrow {\textit {tr}}(x, \mathtt {:knows}, \mathtt {:lucy}) \end{equation}
as its (existential) rule counterpart, which does not contain any existentially quantified variables. Rule (7) is satisfied in the instance
 \begin{equation*}{{\mathcal{I}}}_{1} = \{ {\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, \mathtt {:tom}), {\textit {tr}}(\mathtt {:tom}, \mathtt {:knows},\mathtt {:lucy}) \}\end{equation*}
\begin{equation*}{{\mathcal{I}}}_{1} = \{ {\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, \mathtt {:tom}), {\textit {tr}}(\mathtt {:tom}, \mathtt {:knows},\mathtt {:lucy}) \}\end{equation*}
but not in
 \begin{equation*}{\mathcal{K}}_{1} = \{ {\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, \mathtt {:tom}) \}\end{equation*}
\begin{equation*}{\mathcal{K}}_{1} = \{ {\textit {tr}}(\mathtt {:lucy}, \mathtt {:knows}, \mathtt {:tom}) \}\end{equation*}
since the only fact in
 ${\mathcal{K}}_1$
matches the body of the rule, but there is no fact reflecting on its (instantiated) head (i.e., the required fact
${\mathcal{K}}_1$
matches the body of the rule, but there is no fact reflecting on its (instantiated) head (i.e., the required fact
 ${\textit {tr}}(\mathtt {:tom},\mathtt {:knows},\mathtt {:lucy})$
is missing). Ultimately, the implication (4) with blank nodes in its head may be transferred to a rule with an existential quantifier in the head:
${\textit {tr}}(\mathtt {:tom},\mathtt {:knows},\mathtt {:lucy})$
is missing). Ultimately, the implication (4) with blank nodes in its head may be transferred to a rule with an existential quantifier in the head:
 \begin{equation} \forall x.\ {\textit {tr}}(x, \mathtt {:knows}, \mathtt {:tom}) \rightarrow \exists y .\ \left ({\textit {tr}}(x, \mathtt {:knows}, y) \wedge {\textit {tr}}(y, \mathtt {:name}, \mathtt {"Tom"})\right )\text . \end{equation}
\begin{equation} \forall x.\ {\textit {tr}}(x, \mathtt {:knows}, \mathtt {:tom}) \rightarrow \exists y .\ \left ({\textit {tr}}(x, \mathtt {:knows}, y) \wedge {\textit {tr}}(y, \mathtt {:name}, \mathtt {"Tom"})\right )\text . \end{equation}
It is clear that rule (8) is satisfied in instance
 \begin{equation*}{{\mathcal{I}}}_{2} = \{ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\mathtt {:tom}), {\textit {tr}}(\mathtt {:tom}, \mathtt {:name}, \mathtt {"Tom"}) \}\text .\end{equation*}
\begin{equation*}{{\mathcal{I}}}_{2} = \{ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\mathtt {:tom}), {\textit {tr}}(\mathtt {:tom}, \mathtt {:name}, \mathtt {"Tom"}) \}\text .\end{equation*}
However, instance
 ${\mathcal{K}}_1$
does not satisfy rule (8) because although the only fact satisfies the rule’s body, there are no facts jointly satisfying the rule’s head.
${\mathcal{K}}_1$
does not satisfy rule (8) because although the only fact satisfies the rule’s body, there are no facts jointly satisfying the rule’s head.
Note, for query answering over databases and rules, it is usually not required to decide for a concrete value of
 $y$
(in rule (8)). Many implementations, therefore, use some form of abstraction: for instance, Skolem terms. VLog and Nemo implement the standard chase which uses another set of terms, so-called labeled nulls. Instead of injecting arbitrary constants for existentially quantified variables, (globally) fresh nulls are inserted in the positions existentially quantified variables occur. Such a labeled null embodies the existence of a constant on the level of instances (just like blank nodes in RDF graphs). Let
$y$
(in rule (8)). Many implementations, therefore, use some form of abstraction: for instance, Skolem terms. VLog and Nemo implement the standard chase which uses another set of terms, so-called labeled nulls. Instead of injecting arbitrary constants for existentially quantified variables, (globally) fresh nulls are inserted in the positions existentially quantified variables occur. Such a labeled null embodies the existence of a constant on the level of instances (just like blank nodes in RDF graphs). Let
 $n$
be such a labeled null. Then
$n$
be such a labeled null. Then
 ${{\mathcal{I}}}_{2}$
can be generalized to
${{\mathcal{I}}}_{2}$
can be generalized to
 \begin{equation*}{{\mathcal{I}}}_{3} = \{ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\mathtt {:tom}), {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},n), {\textit {tr}}(n, \mathtt {:name}, \mathtt {"Tom"}) \}\text ,\end{equation*}
\begin{equation*}{{\mathcal{I}}}_{3} = \{ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},\mathtt {:tom}), {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},n), {\textit {tr}}(n, \mathtt {:name}, \mathtt {"Tom"}) \}\text ,\end{equation*}
on which rule (8) is satisfied, binding null
 $n$
to variable
$n$
to variable
 $y$
.
$y$
.
 ${{\mathcal{I}}}_{3}$
is, in fact, more general than
${{\mathcal{I}}}_{3}$
is, in fact, more general than
 ${{\mathcal{I}}}_{2}$
by the following observation: There is a mapping from
${{\mathcal{I}}}_{2}$
by the following observation: There is a mapping from
 ${{\mathcal{I}}}_{3}$
to
${{\mathcal{I}}}_{3}$
to
 ${{\mathcal{I}}}_{2}$
that is a homomorphism (see Subsection 4.1 for a formal introduction) but not vice versa. The homomorphism here maps the null
${{\mathcal{I}}}_{2}$
that is a homomorphism (see Subsection 4.1 for a formal introduction) but not vice versa. The homomorphism here maps the null
 $n$
(from
$n$
(from
 ${{\mathcal{I}}}_{3}$
) to the constant
${{\mathcal{I}}}_{3}$
) to the constant
 $\mathtt {:tom}$
(in
$\mathtt {:tom}$
(in
 ${\mathcal{I}}_{2}$
). Intuitively, the existence of a query answer (for a conjunctive query) on
${\mathcal{I}}_{2}$
). Intuitively, the existence of a query answer (for a conjunctive query) on
 ${\mathcal{I}}_{3}$
implies the existence of a query answer on
${\mathcal{I}}_{3}$
implies the existence of a query answer on
 ${\mathcal{I}}_{2}$
. Existential rule reasoners implementing some form of the chase aim at finding the most general instances (universal models) in this respect (Deutsch et al. Reference Deutsch, Nash, Remmel, Lenzerini and Lembo2008).
${\mathcal{I}}_{2}$
. Existential rule reasoners implementing some form of the chase aim at finding the most general instances (universal models) in this respect (Deutsch et al. Reference Deutsch, Nash, Remmel, Lenzerini and Lembo2008).
In the remainder of this paper, we further analyze the relation between
 $N_3$
and existential rules. First, we give a brief formal account of the two languages and then provide a correct translation function from
$N_3$
and existential rules. First, we give a brief formal account of the two languages and then provide a correct translation function from
 $N_3$
to existential rules.
$N_3$
to existential rules.
3 Existential N3
In the previous section we introduced essential elements of
 $N_3$
, namely triples and rules.
$N_3$
, namely triples and rules.
 $N_3$
also supports more complex constructs like lists, nesting of rules, and quotation. As these features are not covered by existential rules, we define a subset of
$N_3$
also supports more complex constructs like lists, nesting of rules, and quotation. As these features are not covered by existential rules, we define a subset of
 $N_3$
excluding them, called existential
$N_3$
excluding them, called existential
 $N_3$
(
$N_3$
(
 ${N_3}^\exists$
). This fragment of
${N_3}^\exists$
). This fragment of
 $N_3$
is still very powerful as it covers ontology mapping, one of N3’s main use cases. Many ontologies rely on patterns including auxiliary blank nodes.
$N_3$
is still very powerful as it covers ontology mapping, one of N3’s main use cases. Many ontologies rely on patterns including auxiliary blank nodes.
 ${N_3}^\exists$
supports the production of these.Footnote
4
In practice, these mappings are often connected with build-in functions like calculations or string operations,Footnote
5
these are not covered yet, but could be added. A more difficult feature to add would be the support of so-called rule-producing rules: In N3 it is possible to nest rules into the head of other rules. While this technique does not yield more expressivity, it is commonly used to translate from RDF datasets to N3 rules (see e.g., Arndt et al. Reference Arndt, De meester, Bonte, Schaballie, Bhatti, Dereuddre, Verborgh, Ongenae, De turck, Van de walle and Mannens2016). Such rule-producing rules can not be covered by existential rules as these only allow the derivation of facts.
${N_3}^\exists$
supports the production of these.Footnote
4
In practice, these mappings are often connected with build-in functions like calculations or string operations,Footnote
5
these are not covered yet, but could be added. A more difficult feature to add would be the support of so-called rule-producing rules: In N3 it is possible to nest rules into the head of other rules. While this technique does not yield more expressivity, it is commonly used to translate from RDF datasets to N3 rules (see e.g., Arndt et al. Reference Arndt, De meester, Bonte, Schaballie, Bhatti, Dereuddre, Verborgh, Ongenae, De turck, Van de walle and Mannens2016). Such rule-producing rules can not be covered by existential rules as these only allow the derivation of facts.
We base our definitions on so-called simple
 $N_3$
formulae (Arndt Reference Arndt2019, Chapter 7), these are
$N_3$
formulae (Arndt Reference Arndt2019, Chapter 7), these are
 $N_3$
formulae which do not allow for nesting.
$N_3$
formulae which do not allow for nesting.
3.1 Syntax
 ${N_3}^\exists$
relies on the RDF alphabet. As the distinction is not relevant in our context, we consider IRIs and literals together as constants. Let
${N_3}^\exists$
relies on the RDF alphabet. As the distinction is not relevant in our context, we consider IRIs and literals together as constants. Let
 $C$
be a set of such constants,
$C$
be a set of such constants,
 $U$
a set of universal variables (starting with ?), and
$U$
a set of universal variables (starting with ?), and
 $E$
a set of existential variables (i.e., blank nodes). If the sets
$E$
a set of existential variables (i.e., blank nodes). If the sets
 $C$
,
$C$
,
 $U$
,
$U$
,
 $E$
, and
$E$
, and
 $\{\mathtt {\{}, \mathtt {\}}, \mathtt {= \gt }, \mathtt {.}\}$
are mutually disjoint, we call
$\{\mathtt {\{}, \mathtt {\}}, \mathtt {= \gt }, \mathtt {.}\}$
are mutually disjoint, we call
 $\mathfrak{A}:=C \,\cup \, U \,\cup \, E \,\cup \, \{\mathtt {\{}, \mathtt {\}}, \mathtt {= \gt }, \mathtt {.}\}$
an
$\mathfrak{A}:=C \,\cup \, U \,\cup \, E \,\cup \, \{\mathtt {\{}, \mathtt {\}}, \mathtt {= \gt }, \mathtt {.}\}$
an
 $N_3$
alphabet. Figure 1 provides the syntax of
$N_3$
alphabet. Figure 1 provides the syntax of
 ${N_3}^\exists$
over
${N_3}^\exists$
over
 $\mathfrak{A}$
.
$\mathfrak{A}$
.

Fig. 1. Syntax of
 $\operatorname {N3}^\exists$
.
$\operatorname {N3}^\exists$
.
 ${N_3}^\exists$
fully covers RDF. RDF formulae are conjunctions of atomic formulae. Just as generalized RDF (Cyganiak et al. Reference Cyganiak, Wood and Lanthaler2014),
${N_3}^\exists$
fully covers RDF. RDF formulae are conjunctions of atomic formulae. Just as generalized RDF (Cyganiak et al. Reference Cyganiak, Wood and Lanthaler2014),
 ${N_3}^\exists$
allows for literals and blank nodes to occur in subject, predicate, and object position. The same holds for universal variables which are not present in RDF. This syntactical freedom is inherited from full N3 and makes it possible to – among other things – express the rules for RDF/S (Hayes and Patel-Schneider Reference Hayes and Patel-schneider2014, Appendix A) and OWL-RL (Motik et al. Reference Motik, Cuenca grau, Horrocks, Wu, Fokoue and Lutz2009, Section 4.3) entailment via N3. As an example for that, consider the following ruleFootnote
6
for inverse properties:
${N_3}^\exists$
allows for literals and blank nodes to occur in subject, predicate, and object position. The same holds for universal variables which are not present in RDF. This syntactical freedom is inherited from full N3 and makes it possible to – among other things – express the rules for RDF/S (Hayes and Patel-Schneider Reference Hayes and Patel-schneider2014, Appendix A) and OWL-RL (Motik et al. Reference Motik, Cuenca grau, Horrocks, Wu, Fokoue and Lutz2009, Section 4.3) entailment via N3. As an example for that, consider the following ruleFootnote
6
for inverse properties:
 \begin{equation} \mathtt {\{?p1\;\;owl:inverseOf\;\;?p2\;\;.\;\;?x\;\;?p1\;\;?y\;\;.\}= \gt \{?y\;\;?p2\;\;?x \}.} \end{equation}
\begin{equation} \mathtt {\{?p1\;\;owl:inverseOf\;\;?p2\;\;.\;\;?x\;\;?p1\;\;?y\;\;.\}= \gt \{?y\;\;?p2\;\;?x \}.} \end{equation}
If we apply this rule on triple (1) in combination with
 \begin{equation} \mathtt {:knows\;\;owl:inverseOf\;\;:isKnownBy.} \end{equation}
\begin{equation} \mathtt {:knows\;\;owl:inverseOf\;\;:isKnownBy.} \end{equation}
we derive
 \begin{equation} \mathtt {:tom\;\;:isKnownBy\;\;:lucy.} \end{equation}
\begin{equation} \mathtt {:tom\;\;:isKnownBy\;\;:lucy.} \end{equation}
Similar statements and rules can be made for triples including literals. We can for example declare that the :name from rule (4) is the owl:inverseOf of :isNameOf.Footnote 7 With rule (10) we then derive from
 \begin{equation} \mathtt {\_:x\;\;:name\;\;"Tom".} \end{equation}
\begin{equation} \mathtt {\_:x\;\;:name\;\;"Tom".} \end{equation}
that
 \begin{equation} \mathtt {"Tom"\;\;:isNameOf\;\;\_:x.} \end{equation}
\begin{equation} \mathtt {"Tom"\;\;:isNameOf\;\;\_:x.} \end{equation}
In that sense the use of generalized RDF ensures that all logical consequences we are able to produce via rules can also be stated in the language. This principle of syntactical completeness is also the reason to allow literals and blank nodes in predicate position. As universals may occur in predicate position, this also needs to be the case for all other kinds of symbols.
Currently, there is one exception to our principle: The syntax above allows rules having new universal variables in their head like for example
 \begin{equation} \mathtt {\{:lucy\;\;:knows\;\;:tom\}= \gt \{?x\;\;:is\;\;:happy\}.} \end{equation}
\begin{equation} \mathtt {\{:lucy\;\;:knows\;\;:tom\}= \gt \{?x\;\;:is\;\;:happy\}.} \end{equation}
which results in a rule expressing “if lucy knows tom, everyone is happy.” This implication is problematic: Applied on triple (1), it yields
 $\mathtt {? x\;\;:is\;\;:happy.}$
which is a triple containing a universal variable. Such triples are not covered by our syntax, the rule thus introduces a fact we cannot express. Therefore, we restrict
$\mathtt {? x\;\;:is\;\;:happy.}$
which is a triple containing a universal variable. Such triples are not covered by our syntax, the rule thus introduces a fact we cannot express. Therefore, we restrict
 ${N_3}^\exists$
rules to well-formed implications which rely on components. Components can be seen as direct partsFootnote
8
an N3 formula consists of. Let
${N_3}^\exists$
rules to well-formed implications which rely on components. Components can be seen as direct partsFootnote
8
an N3 formula consists of. Let
 $f$
be a formula or an expression over an alphabet
$f$
be a formula or an expression over an alphabet
 $\mathfrak{A}$
. The set
$\mathfrak{A}$
. The set
 ${\operatorname {comp}}(f)$
of components of
${\operatorname {comp}}(f)$
of components of
 $f$
is defined as:
$f$
is defined as:
-
• If
 $f$
is an atomic formula or a triple expression of the form
$t_1\, t_2\, t_3.$
,
${\operatorname {comp}}(f)=\{t_1,t_2,t_3\}$
.
$f$
is an atomic formula or a triple expression of the form
$t_1\, t_2\, t_3.$
,
${\operatorname {comp}}(f)=\{t_1,t_2,t_3\}$
. -
• If
$f$
is an implication of the form
$\mathtt {{e_{1}}= \gt {e_{2}}}.$
, then
${\operatorname {comp}}(f)=\{\mathtt {{e_1}, {e_2}}\}$
. -
• If
$f$
is a conjunction of the form
$f_1 f_2$
, then
${\operatorname {comp}}(f)={\operatorname {comp}}(f_1)\cup {\operatorname {comp}}(f_2)$
.









A rule
 $\mathtt {\{e}_1\mathtt {\}= \gt \{e}_2\mathtt {\}} .$
is called well-formed if
$\mathtt {\{e}_1\mathtt {\}= \gt \{e}_2\mathtt {\}} .$
is called well-formed if
 $({\operatorname {comp}}(\mathtt {e}_2)\setminus {\operatorname {comp}}(\mathtt {e}_1))\cap U=\emptyset$
. For the remainder of this paper we assume all implications to be well-formed. Note that this definition of well-formed formulae is closely related to the idea of safety in logic programing. Well-formed rules are safe.
$({\operatorname {comp}}(\mathtt {e}_2)\setminus {\operatorname {comp}}(\mathtt {e}_1))\cap U=\emptyset$
. For the remainder of this paper we assume all implications to be well-formed. Note that this definition of well-formed formulae is closely related to the idea of safety in logic programing. Well-formed rules are safe.
3.2 Semantics
In order to define the semantics of
 ${N_3}^\exists$
we first note, that in our fragment of
${N_3}^\exists$
we first note, that in our fragment of
 $N_3$
all quantification of variables is only defined implicitly. The blank node in triple (2) is understood as an existentially quantified variable, the universal in formula (3) as universally quantified. Universal quantification spans over the whole formula – variable ?x occurring in body and head of rule (3) is universally quantified for the whole implication – while existential quantification is local – the conjunction in the head of rule (4) is existentially quantified there. Adding new triples as conjuncts to formula (4) like
$N_3$
all quantification of variables is only defined implicitly. The blank node in triple (2) is understood as an existentially quantified variable, the universal in formula (3) as universally quantified. Universal quantification spans over the whole formula – variable ?x occurring in body and head of rule (3) is universally quantified for the whole implication – while existential quantification is local – the conjunction in the head of rule (4) is existentially quantified there. Adding new triples as conjuncts to formula (4) like
 \begin{equation} \mathtt {:lucy\;\;:knows\;\;\_:y.\;\;\_:y\;\;:likes\;\;:cake. } \end{equation}
\begin{equation} \mathtt {:lucy\;\;:knows\;\;\_:y.\;\;\_:y\;\;:likes\;\;:cake. } \end{equation}
leads to the new statement that “lucy knows someone who likes cake” but even though we are using the same blank node identifier _:y in both formulae, the quantification of the variables in this formula is totally seperated and the person named “Tom” is not necessarily related to the cake-liker. With the goal to deal with this locality of blank node scoping, we define substitutions which are only applied on components of formulae and leave nested elements like for example the body and head of rule (3) untouched.
A substitution
 $\sigma$
is a mapping from a set of variables
$\sigma$
is a mapping from a set of variables
 $X\subset U\cup E$
to the set of
$X\subset U\cup E$
to the set of
 $N_3$
terms. We apply
$N_3$
terms. We apply
 $\sigma$
to a term, formula or expression
$\sigma$
to a term, formula or expression
 $x$
as follows:
$x$
as follows:
-
•
$x \sigma = \sigma (x)$
if
$x\in X$
, -
•
$(s\,p\,o) \sigma =(s\sigma )( p\sigma ) (o\sigma )$
if
$x=s\,p\, o$
is an atomic formula or a triple expression, -
•
$(f_1f_2) \sigma =(f_1\sigma )( f_2\sigma )$
if
$x=f_1f_2$
is a conjunction, -
•
$x \sigma = x$
else.







For formula
 $f=\mathtt {\_:x\;\;:p\;\;:o. \{\_:x\;\;:b\;\;:c\}= \gt \{\_:x\;\;:d\;\;:e\}.}$
, substitution
$f=\mathtt {\_:x\;\;:p\;\;:o. \{\_:x\;\;:b\;\;:c\}= \gt \{\_:x\;\;:d\;\;:e\}.}$
, substitution
 $\sigma$
and
$\sigma$
and
 $\mathtt {\_:x}\in \text{dom}(\sigma )$
, we get:
$\mathtt {\_:x}\in \text{dom}(\sigma )$
, we get:
 $f\sigma =\sigma (\mathtt {\_:x}) \mathtt {:p\;\;:o. \{\_:x\;\;:b\;\;:c\}= \gt \{\_:x\;\;:d\;\;:e\}}$
.Footnote
9
We use the substitution to define the semantics of
$f\sigma =\sigma (\mathtt {\_:x}) \mathtt {:p\;\;:o. \{\_:x\;\;:b\;\;:c\}= \gt \{\_:x\;\;:d\;\;:e\}}$
.Footnote
9
We use the substitution to define the semantics of
 ${N_3}^\exists$
which additionally makes use of N3 interpretations
${N_3}^\exists$
which additionally makes use of N3 interpretations
 $\mathfrak{I} = (\mathfrak{D},\mathfrak{a},\mathfrak{p})$
consisting of (1) a set
$\mathfrak{I} = (\mathfrak{D},\mathfrak{a},\mathfrak{p})$
consisting of (1) a set
 $\mathfrak{D}$
, called the domain of
$\mathfrak{D}$
, called the domain of
 $\mathfrak{I}$
; (2) a mapping
$\mathfrak{I}$
; (2) a mapping
 $\mathfrak{a}: C\rightarrow \mathfrak{D}$
, called the object function; (3) a mapping
$\mathfrak{a}: C\rightarrow \mathfrak{D}$
, called the object function; (3) a mapping
 $\mathfrak{p}: \mathfrak{D} \rightarrow 2^{\mathfrak{D} \times \mathfrak{D}}$
, called the predicate function.
$\mathfrak{p}: \mathfrak{D} \rightarrow 2^{\mathfrak{D} \times \mathfrak{D}}$
, called the predicate function.
Just as the function IEXT in RDF’s simple interpretations (Hayes Reference Hayes2004),
 $N_3$
’s predicate function maps elements from the domain of discourse to a set of pairs of domain elements and is not applied on relation symbols directly. This makes quantification over predicates possible while not exceeding first-order logic in terms of complexity. To introduce the semantics of
$N_3$
’s predicate function maps elements from the domain of discourse to a set of pairs of domain elements and is not applied on relation symbols directly. This makes quantification over predicates possible while not exceeding first-order logic in terms of complexity. To introduce the semantics of
 ${N_3}^\exists$
, let
${N_3}^\exists$
, let
 $\mathfrak{I}=(\mathfrak{D},\mathfrak{a,p})$
be an
$\mathfrak{I}=(\mathfrak{D},\mathfrak{a,p})$
be an
 $N_3$
interpretation. For an
$N_3$
interpretation. For an
 ${N_3}^\exists$
formula
${N_3}^\exists$
formula
 $f$
:
$f$
:
-
1. If
$W=\text{comp}(f)\cap E \neq \emptyset$
, then
$\mathfrak{I}\models f$
iff
$\mathfrak{I}\models f\mu$
for some substitution
$\mu \;:\; W\rightarrow C$
. -
2. If
$\text{comp}(f)\cap E=\emptyset$
:





-
(a) If
$f$
is an atomic formula
$t_1\, t_2\, t_3$
, then
$\mathfrak{I} \models t_1\, t_2\, t_3$
. iff
$(\mathfrak{a}(t_1),\mathfrak{a}(t_3))\in \mathfrak{p}(\mathfrak{a}(t_2))$
. -
(b) If
$f$
is a conjunction
$f_1f_2$
, then
$\mathfrak{I}\models f_1 f_2$
iff
$\mathfrak{I}\models f_1$
and
$\mathfrak{I}\models f_2$
. -
(c) If
$f$
is an implication, then
$\mathfrak{I} \models \mathtt {{ e_1 } = \gt {e_2}}$
iff
$\mathfrak{I} \models e_2\sigma$
if
$\mathfrak{I} \models e_1\sigma$
for all substitutions
$\sigma$
on the universal variables
$\text{comp}(\mathtt {e}_1)\cap U$
by constants.















The semantics as defined above uses a substitution into the set of constants instead of a direct assignment to the domain of discourse to interpret quantified variables. This design choice inherited from
 $N_3$
ensures referential opacity of quoted graphs and means, in essence, that quantification always refers to named domain elements.
$N_3$
ensures referential opacity of quoted graphs and means, in essence, that quantification always refers to named domain elements.
With that semantics, we call an interpretation
 $\mathfrak{M}$
model of a dataset
$\mathfrak{M}$
model of a dataset
 $\Phi$
, written as
$\Phi$
, written as
 $\mathfrak{M}\models \Phi$
, if
$\mathfrak{M}\models \Phi$
, if
 $\mathfrak{M}\models f$
for each formula
$\mathfrak{M}\models f$
for each formula
 $f\in \Phi$
. We say that two sets of
$f\in \Phi$
. We say that two sets of
 ${N_3}^\exists$
formulae
${N_3}^\exists$
formulae
 $\Phi$
and
$\Phi$
and
 $\Psi$
are equivalent, written as
$\Psi$
are equivalent, written as
 $\Phi \equiv \Psi$
, if for all interpretations
$\Phi \equiv \Psi$
, if for all interpretations
 $\mathfrak{M}$
:
$\mathfrak{M}$
:
 $\mathfrak{M}\models \Phi$
iff
$\mathfrak{M}\models \Phi$
iff
 $\mathfrak{M}\models \Psi$
. If
$\mathfrak{M}\models \Psi$
. If
 $\Phi =\{\phi \}$
and
$\Phi =\{\phi \}$
and
 $\Psi =\{\psi \}$
are singleton sets, we write
$\Psi =\{\psi \}$
are singleton sets, we write
 $\phi \equiv \psi$
omitting the brackets.
$\phi \equiv \psi$
omitting the brackets.
3.2.1 Piece normal form
 ${N_3}{}^\exists$
formulae consist of conjunctions of triples and implications. For our goal of translating such formulae to existential rules, it is convenient to consider sub-formulae seperately.
${N_3}{}^\exists$
formulae consist of conjunctions of triples and implications. For our goal of translating such formulae to existential rules, it is convenient to consider sub-formulae seperately.
Below, we therefore define the so-called Piece Normal Form (PNF) for
 ${N_3}{}^\exists$
formulae and show that each such formula
${N_3}{}^\exists$
formulae and show that each such formula
 $f$
is equivalent to a set of sub-formulae
$f$
is equivalent to a set of sub-formulae
 $\Phi$
(i.e.,
$\Phi$
(i.e.,
 $\Phi \equiv \phi$
) in PNF. We proceed in two steps. First, we separate formulae based on their blank node components. If two parts of a conjunction share a blank node component, as in formula (15), we cannot split the formula into two since the information about the co-reference would get lost. However, if conjuncts either do not contain blank nodes or only contain disjoint sets of these, we can split them into so-called pieces: Two formulae
$\Phi \equiv \phi$
) in PNF. We proceed in two steps. First, we separate formulae based on their blank node components. If two parts of a conjunction share a blank node component, as in formula (15), we cannot split the formula into two since the information about the co-reference would get lost. However, if conjuncts either do not contain blank nodes or only contain disjoint sets of these, we can split them into so-called pieces: Two formulae
 $f_1$
and
$f_1$
and
 $f_2$
are called pieces of a formula
$f_2$
are called pieces of a formula
 $f$
if
$f$
if
 $f=f_1f_2$
and
$f=f_1f_2$
and
 ${\operatorname {comp}}(f_1)\cap {\operatorname {comp}}(f_2)\cap E=\emptyset$
. For such formulae we know:
${\operatorname {comp}}(f_1)\cap {\operatorname {comp}}(f_2)\cap E=\emptyset$
. For such formulae we know:
Lemma 3.1 (Pieces). Let
 $f=f_1f_2$
be an
$f=f_1f_2$
be an
 ${N_3}^\exists$
conjunction and let
${N_3}^\exists$
conjunction and let
 ${\operatorname {comp}}(f_1)\cap {\operatorname {comp}}(f_2)\cap E=\emptyset$
, then for each interpretation
${\operatorname {comp}}(f_1)\cap {\operatorname {comp}}(f_2)\cap E=\emptyset$
, then for each interpretation
 $\mathfrak{I}$
,
$\mathfrak{I}$
,
 $\mathfrak{I}\models f \text{ iff } \mathfrak{I}\models f_1 \text{ and } \mathfrak{I}\models f_2$
.
$\mathfrak{I}\models f \text{ iff } \mathfrak{I}\models f_1 \text{ and } \mathfrak{I}\models f_2$
.
Proof.
-
1. If
${\operatorname {comp}}(f)\cap E=\emptyset$
the claim follows immediately by point 2b in the semantics definition. -
2. If
$W=\text{comp}(f)\cap E \neq \emptyset$
: (
$\Rightarrow$
) If
$\mathfrak{I}\models f$
then there exists a substitution
$\mu \;:\;{\operatorname {comp}}(f)\cap E\rightarrow C$
such that
$\mathfrak{I}\models f\mu$
, that is
$\mathfrak{I}\models (f_1\mu )\,(f_2\mu )$
. According to the previous point that implies
$\mathfrak{I}\models f_1\mu$
and
$\mathfrak{I}\models f_2\mu$
and thus
$\mathfrak{I}\models f_1$
and
$\mathfrak{I}\models f_2$
. (
$\Leftarrow$
) If
$\mathfrak{I}\models f_1$
and
$\mathfrak{I}\models f_2$
, then there exist two substitutions
$\mu _1:{\operatorname {comp}}(f_1)\cap E\rightarrow C$
and
$\mu _2:{\operatorname {comp}}(f_2)\cap E\rightarrow C$
such that
$\mathfrak{I}\models f_1\mu _1$
and
$\mathfrak{I}\models f_2\mu _2$
. As the domains of the two substitutions are disjoint (by assumption), we can define the substitution
$\mu \;:\;{\operatorname {comp}}(f)\cap E\rightarrow C$
as follows:Then
\begin{align*} \mu (v) = {\begin{cases} \mu _1(v) & \text{ if } v\in {\operatorname {comp}}(f_1) \\ \mu _2(v)& \, \text{else}\\ \end{cases}} \end{align*}
$\mathfrak{I}\models f\mu$
and therefore
$\mathfrak{I}\models f$
.






















If we recursively divide all pieces into sub-pieces, we get a maximal set
 $F=\{f_1, f_2, \ldots , f_n\}$
for each formula
$F=\{f_1, f_2, \ldots , f_n\}$
for each formula
 $f$
such that
$f$
such that
 $F\equiv \{f\}$
and for all
$F\equiv \{f\}$
and for all
 $1 \leq i, j \leq n$
,
$1 \leq i, j \leq n$
,
 $\text{comp}(f_{i})\cap \text{comp}(f_{j})\cap E \neq \emptyset$
implies
$\text{comp}(f_{i})\cap \text{comp}(f_{j})\cap E \neq \emptyset$
implies
 $i=j$
.
$i=j$
.
Second, we replace all blank nodes occurring in rule bodies by fresh universals. The rule
 \begin{equation*}\mathtt {\{\_:x\;\;:likes\;\;:cake\}= \gt \{:cake\;\;:is\;\;:good\}.}\end{equation*}
\begin{equation*}\mathtt {\{\_:x\;\;:likes\;\;:cake\}= \gt \{:cake\;\;:is\;\;:good\}.}\end{equation*}
becomes
 \begin{equation*}\mathtt {\{?y\;\;:likes\;\;:cake\}= \gt \{:cake\;\;:is\;\;:good\}.}\end{equation*}
\begin{equation*}\mathtt {\{?y\;\;:likes\;\;:cake\}= \gt \{:cake\;\;:is\;\;:good\}.}\end{equation*}
Note that both rules have the same meaning, namely “if someone likes cake, then cake is good.” We generalize that:
Lemma 3.2 (Eliminating Existentials). Let
 $f= \mathtt {{e_1} = \gt { e_2}}$
and
$f= \mathtt {{e_1} = \gt { e_2}}$
and
 $g=\mathtt {{ e'_1 } = \gt { e_2}}$
be
$g=\mathtt {{ e'_1 } = \gt { e_2}}$
be
 ${N_3}^\exists$
implications such that
${N_3}^\exists$
implications such that
 $e'_1=e_1\sigma$
for some injective substitution
$e'_1=e_1\sigma$
for some injective substitution
 $\sigma \;:\;{\operatorname {comp}}(e_1)\cap E\rightarrow U\setminus {\operatorname {comp}}(e_1)$
of the existential variables of
$\sigma \;:\;{\operatorname {comp}}(e_1)\cap E\rightarrow U\setminus {\operatorname {comp}}(e_1)$
of the existential variables of
 $e_1$
by universals. Then
$e_1$
by universals. Then
 $f\equiv g$
.
$f\equiv g$
.
Proof.
We first note that
 ${\operatorname {comp}}(f)\cap E=\emptyset$
and
${\operatorname {comp}}(f)\cap E=\emptyset$
and
 ${\operatorname {comp}}(g)\cap E=\emptyset$
since both formulae are implications.
${\operatorname {comp}}(g)\cap E=\emptyset$
since both formulae are implications.
(
 $\Rightarrow$
) We assume that
$\Rightarrow$
) We assume that
 $\mathfrak{M}\not \models g$
for some model
$\mathfrak{M}\not \models g$
for some model
 $\mathfrak{M}$
. That is, there exists a substitution
$\mathfrak{M}$
. That is, there exists a substitution
 $\nu \;:\; ({\operatorname {comp}}(e'_1)\cup {\operatorname {comp}}(e_2))\cap U\rightarrow C$
such that
$\nu \;:\; ({\operatorname {comp}}(e'_1)\cup {\operatorname {comp}}(e_2))\cap U\rightarrow C$
such that
 $\mathfrak{M}\models e'_1 \nu$
and
$\mathfrak{M}\models e'_1 \nu$
and
 $\mathfrak{M}\not \models e_2\nu$
. We show that
$\mathfrak{M}\not \models e_2\nu$
. We show that
 $\mathfrak{M}\models e_1\nu$
: As
$\mathfrak{M}\models e_1\nu$
: As
 $(({\operatorname {comp}}(e_1)\cup {\operatorname {comp}}(e_2))\cap U)\subset (({\operatorname {comp}}(e'_1)\cup {\operatorname {comp}}(e_2))\cap U)$
, we know that
$(({\operatorname {comp}}(e_1)\cup {\operatorname {comp}}(e_2))\cap U)\subset (({\operatorname {comp}}(e'_1)\cup {\operatorname {comp}}(e_2))\cap U)$
, we know that
 ${\operatorname {comp}}(e_1\nu )\cap U =\emptyset$
. With the substitution
${\operatorname {comp}}(e_1\nu )\cap U =\emptyset$
. With the substitution
 $\mu := \nu \circ \sigma$
for the existential variables in
$\mu := \nu \circ \sigma$
for the existential variables in
 $e_1\nu$
we get
$e_1\nu$
we get
 $\mathfrak{M}\models (e_1 \nu ) \sigma$
and thus
$\mathfrak{M}\models (e_1 \nu ) \sigma$
and thus
 $\mathfrak{M}\models (e_1 \nu )$
, but as
$\mathfrak{M}\models (e_1 \nu )$
, but as
 $\mathfrak{M}\not \models (e_2 \nu )$
we can conclude that
$\mathfrak{M}\not \models (e_2 \nu )$
we can conclude that
 $\mathfrak{M}\not \models f$
.
$\mathfrak{M}\not \models f$
.
(
 $\Leftarrow$
) We assume that
$\Leftarrow$
) We assume that
 $\mathfrak{M}\not \models f$
. That is, there exists a substitution
$\mathfrak{M}\not \models f$
. That is, there exists a substitution
 $\nu \;:\; ({\operatorname {comp}}(e_1)\cup {\operatorname {comp}}(e_2))\cap U\rightarrow C$
such that
$\nu \;:\; ({\operatorname {comp}}(e_1)\cup {\operatorname {comp}}(e_2))\cap U\rightarrow C$
such that
 $\mathfrak{M}\models e_1 \nu$
and
$\mathfrak{M}\models e_1 \nu$
and
 $\mathfrak{M}\not \models e_2\nu$
. As
$\mathfrak{M}\not \models e_2\nu$
. As
 $\mathfrak{M}\models e_1 \nu$
, there exists a substitution
$\mathfrak{M}\models e_1 \nu$
, there exists a substitution
 $\mu \;:\;{\operatorname {comp}}(e_1\nu )\cap E\rightarrow C$
such that
$\mu \;:\;{\operatorname {comp}}(e_1\nu )\cap E\rightarrow C$
such that
 $\mathfrak{M}\models (e_1 \nu )\mu$
. With that we define a substitution
$\mathfrak{M}\models (e_1 \nu )\mu$
. With that we define a substitution
 $\nu ':({\operatorname {comp}}(e_1)\cup {\operatorname {comp}}(e_2))\cap U\rightarrow C$
as follows:
$\nu ':({\operatorname {comp}}(e_1)\cup {\operatorname {comp}}(e_2))\cap U\rightarrow C$
as follows:
 $\nu ':U\rightarrow C$
as follows:
$\nu ':U\rightarrow C$
as follows:
 \begin{equation*}\nu '(v) = \begin{cases} \mu (\sigma ^{-1}(v)) & \text{ if } v\in range(\sigma ) \\ \nu (v)& \, \text{else} \end{cases}\end{equation*}
\begin{equation*}\nu '(v) = \begin{cases} \mu (\sigma ^{-1}(v)) & \text{ if } v\in range(\sigma ) \\ \nu (v)& \, \text{else} \end{cases}\end{equation*}
With that substitution we get
 $\mathfrak{M}\models e'_1\nu '$
but
$\mathfrak{M}\models e'_1\nu '$
but
 $\mathfrak{M}\not \models e_2\nu '$
and thus
$\mathfrak{M}\not \models e_2\nu '$
and thus
 $\mathfrak{M}\not \models g$
.
$\mathfrak{M}\not \models g$
.
For a rule
 $f$
we call the formula
$f$
we call the formula
 $f'$
in which all existentials occurring in its body are replaced by universals following Lemma 3.2 the normalized version of the rule. We call an
$f'$
in which all existentials occurring in its body are replaced by universals following Lemma 3.2 the normalized version of the rule. We call an
 ${N_3}{}^{\exists }$
formula
${N_3}{}^{\exists }$
formula
 $f$
normalized, if all rules occurring in it as conjuncts are normalized. Combining the findings of the two previous lemmas, we introduce the Piece Normal Form:
$f$
normalized, if all rules occurring in it as conjuncts are normalized. Combining the findings of the two previous lemmas, we introduce the Piece Normal Form:
Definition 3.3 (Piece Normal Form). A finite set
 $\Phi = { f_1, f_2, \ldots , f_n }$
of
$\Phi = { f_1, f_2, \ldots , f_n }$
of
 ${N_3}{}^\exists$
formulae is in piece normal form (PNF) if all
${N_3}{}^\exists$
formulae is in piece normal form (PNF) if all
 $f_i \in \Phi$
(
$f_i \in \Phi$
(
 $1 \leq i \leq n$
) are normalized and
$1 \leq i \leq n$
) are normalized and
 $n \in \mathbb{N}$
is the maximal number such that for
$n \in \mathbb{N}$
is the maximal number such that for
 $1 \leq i,j \leq n$
,
$1 \leq i,j \leq n$
,
 ${\operatorname {comp}}(f_i) \cap {\operatorname {comp}}(f_j) \cap E \neq \emptyset$
implies
${\operatorname {comp}}(f_i) \cap {\operatorname {comp}}(f_j) \cap E \neq \emptyset$
implies
 $i = j$
. If
$i = j$
. If
 $f_i \in \Phi$
is a conjunction of atomic formulae, we call
$f_i \in \Phi$
is a conjunction of atomic formulae, we call
 $f_i$
an atomic piece.
$f_i$
an atomic piece.
We get the following result for
 ${N_3}^\exists$
formulae:
${N_3}^\exists$
formulae:
Theorem 3.4.
For every well-formed
 ${N_3}^\exists$
formula
${N_3}^\exists$
formula
 $f$
, there exists a set
$f$
, there exists a set
 $F =\{ f_{1}, f_{2}, \ldots , f_{k}\}$
of
$F =\{ f_{1}, f_{2}, \ldots , f_{k}\}$
of
 ${N_3}^\exists$
formulae such that
${N_3}^\exists$
formulae such that
 $F\equiv \{f\}$
and
$F\equiv \{f\}$
and
 $F$
is in piece normal form.
$F$
is in piece normal form.
Since the piece normal form
 $F$
of
$F$
of
 ${N_3}^\exists$
formula
${N_3}^\exists$
formula
 $f$
is obtained by only replacing variables and separating conjuncts of
$f$
is obtained by only replacing variables and separating conjuncts of
 $f$
into the set form, the overall size of
$f$
into the set form, the overall size of
 $F$
is linear in
$F$
is linear in
 $f$
.
$f$
.
4 From N3 to existential rules
Due to Theorem3.4, we translate sets
 $F$
of
$F$
of
 ${N_3}^\exists$
formulae in PNF (cf. Definition 3.3) to sets of existential rules
${N_3}^\exists$
formulae in PNF (cf. Definition 3.3) to sets of existential rules
 $\mathcal{T}(F)$
without loss of generality. As a preliminary step, we introduce the language of existential rules formally. Later on, we explain and formally define the translation function already sketched in Section 2. We close this section with a correctness argument, paving the way for existential rule reasoning for
$\mathcal{T}(F)$
without loss of generality. As a preliminary step, we introduce the language of existential rules formally. Later on, we explain and formally define the translation function already sketched in Section 2. We close this section with a correctness argument, paving the way for existential rule reasoning for
 ${N_3}^\exists$
formulae.
${N_3}^\exists$
formulae.
4.1 Foundations of existential rule reasoning
As for
 $N_3$
, we consider a first-order vocabulary, consisting of countably infinite mutually disjoint sets of constants (
$N_3$
, we consider a first-order vocabulary, consisting of countably infinite mutually disjoint sets of constants (
 $\mathbf{C}$
), variables (
$\mathbf{C}$
), variables (
 $\mathbf{V}$
), and additionally so-called (labeled) nulls (
$\mathbf{V}$
), and additionally so-called (labeled) nulls (
 $\mathbf{N}$
).Footnote
10
As already mentioned in Section 2, we use the same set of constants as
$\mathbf{N}$
).Footnote
10
As already mentioned in Section 2, we use the same set of constants as
 $N_3$
formulae, meaning
$N_3$
formulae, meaning
 ${\mathbf{C}} = C$
. Furthermore, let
${\mathbf{C}} = C$
. Furthermore, let
 $\mathbf{P}$
be a (countably infinite) set of relation names, where each
$\mathbf{P}$
be a (countably infinite) set of relation names, where each
 $p\in {\mathbf{P}}$
comes with an arity
$p\in {\mathbf{P}}$
comes with an arity
 $\mathit{ar}(p)\in \mathbb{N}$
.
$\mathit{ar}(p)\in \mathbb{N}$
.
 $\mathbf{P}$
is disjoint from the term sets
$\mathbf{P}$
is disjoint from the term sets
 $\mathbf{C}$
,
$\mathbf{C}$
,
 $\mathbf{V}$
, and
$\mathbf{V}$
, and
 $\mathbf{N}$
. We reserve the ternary relation name
$\mathbf{N}$
. We reserve the ternary relation name
 ${\textit {tr}}\in {\mathbf{P}}$
for our encoding of
${\textit {tr}}\in {\mathbf{P}}$
for our encoding of
 $N_3$
triples. If
$N_3$
triples. If
 $p\in {\mathbf{P}}$
and
$p\in {\mathbf{P}}$
and
 $t_{1},t_{2},\ldots ,t_{\mathit{ar}(p)}$
is a list of terms (i.e., each
$t_{1},t_{2},\ldots ,t_{\mathit{ar}(p)}$
is a list of terms (i.e., each
 $t_{i}\in {\mathbf{C}}\cup {\mathbf{N}}\cup {\mathbf{V}}$
),
$t_{i}\in {\mathbf{C}}\cup {\mathbf{N}}\cup {\mathbf{V}}$
),
 $p(t_{1},t_{2},\ldots ,t_{\mathit{ar}(p)})$
is called an atom. We often use
$p(t_{1},t_{2},\ldots ,t_{\mathit{ar}(p)})$
is called an atom. We often use
 $\mathbf{t}$
to summarize a term list like
$\mathbf{t}$
to summarize a term list like
 $t_{1},\ldots ,t_{n}$
(
$t_{1},\ldots ,t_{n}$
(
 $n\in \mathbb{N}$
), and treat it as a set whenever order is irrelevant. An atom
$n\in \mathbb{N}$
), and treat it as a set whenever order is irrelevant. An atom
 $p(\mathbf{t})$
is ground if
$p(\mathbf{t})$
is ground if
 $\mathbf{t} \subseteq {\mathbf{C}}$
. An instance is a (possibly infinite) set
$\mathbf{t} \subseteq {\mathbf{C}}$
. An instance is a (possibly infinite) set
 $\mathcal{I}$
of variable-free atoms and a finite set of ground atoms
$\mathcal{I}$
of variable-free atoms and a finite set of ground atoms
 ${\mathcal{D}}$
is called a database.
${\mathcal{D}}$
is called a database.
For a set of atoms
 ${\mathcal{I}}[A]$
and an instance
${\mathcal{I}}[A]$
and an instance
 $\mathcal{I}$
, we call a function
$\mathcal{I}$
, we call a function
 $h$
from the terms occurring in
$h$
from the terms occurring in
 ${\mathcal{I}}[A]$
to the terms in
${\mathcal{I}}[A]$
to the terms in
 $\mathcal{I}$
a homomorphism from
$\mathcal{I}$
a homomorphism from
 ${\mathcal{I}}[A]$
to
${\mathcal{I}}[A]$
to
 $\mathcal{I}$
, denoted by
$\mathcal{I}$
, denoted by
 $h \;:\; {\mathcal{I}}[A]\to {\mathcal{I}}$
, if (1)
$h \;:\; {\mathcal{I}}[A]\to {\mathcal{I}}$
, if (1)
 $h(c)=c$
for all
$h(c)=c$
for all
 $c\in {\mathbf{C}}$
(occurring in
$c\in {\mathbf{C}}$
(occurring in
 ${\mathcal{I}}[A]$
), and (2)
${\mathcal{I}}[A]$
), and (2)
 $p(\mathbf{t})\in {\mathcal{I}}[A]$
implies
$p(\mathbf{t})\in {\mathcal{I}}[A]$
implies
 $p(h(\mathbf{t}))\in {\mathcal{I}}$
. If any homomorphism from
$p(h(\mathbf{t}))\in {\mathcal{I}}$
. If any homomorphism from
 ${\mathcal{I}}[A]$
to
${\mathcal{I}}[A]$
to
 $\mathcal{I}$
exists, write
$\mathcal{I}$
exists, write
 ${\mathcal{I}}[A]\to {\mathcal{I}}$
. Please note that if
${\mathcal{I}}[A]\to {\mathcal{I}}$
. Please note that if
 $n$
is a null occurring in
$n$
is a null occurring in
 ${\mathcal{I}}[A]$
, then
${\mathcal{I}}[A]$
, then
 $h(n)$
may be a constant or null.
$h(n)$
may be a constant or null.
For an (existential) rule
 $r\colon \forall \mathbf{x}, \mathbf{y} .\ \varphi [\mathbf{x},\mathbf{y}] \rightarrow \exists \mathbf{z} .\ \psi [\mathbf{y},\mathbf{z}]$
(cf. (5)), rule body (
$r\colon \forall \mathbf{x}, \mathbf{y} .\ \varphi [\mathbf{x},\mathbf{y}] \rightarrow \exists \mathbf{z} .\ \psi [\mathbf{y},\mathbf{z}]$
(cf. (5)), rule body (
 ${\textsf {body}(r)} := \varphi$
) and head (
${\textsf {body}(r)} := \varphi$
) and head (
 ${\textsf {head}(r)} := \psi$
) will also be considered as sets of atoms for a more compact representation of the semantics. The notation
${\textsf {head}(r)} := \psi$
) will also be considered as sets of atoms for a more compact representation of the semantics. The notation
 $\varphi [\mathbf{x},\mathbf{y}]$
(
$\varphi [\mathbf{x},\mathbf{y}]$
(
 $\psi [\mathbf{y},\mathbf{z}]$
, resp.) indicates that the only variables occurring in
$\psi [\mathbf{y},\mathbf{z}]$
, resp.) indicates that the only variables occurring in
 $\varphi$
(
$\varphi$
(
 $\psi$
, resp.) are
$\psi$
, resp.) are
 $\mathbf{x}\cup \mathbf{y}$
(
$\mathbf{x}\cup \mathbf{y}$
(
 $\mathbf{y}\cup \mathbf{z}$
, resp.). A finite set of existential rules
$\mathbf{y}\cup \mathbf{z}$
, resp.). A finite set of existential rules
 $\Sigma$
is called an (existential) rule program.
$\Sigma$
is called an (existential) rule program.
Let
 $r$
be a rule and
$r$
be a rule and
 $\mathcal{I}$
an instance. We call a homomorphism
$\mathcal{I}$
an instance. We call a homomorphism
 $h \;:\; {\textsf {body}(r)} \to {\mathcal{I}}$
a match for
$h \;:\; {\textsf {body}(r)} \to {\mathcal{I}}$
a match for
 $r$
in
$r$
in
 $\mathcal{I}$
. Match
$\mathcal{I}$
. Match
 $h$
is satisfied for
$h$
is satisfied for
 $r$
in
$r$
in
 $\mathcal{I}$
if there is an extension
$\mathcal{I}$
if there is an extension
 $h^{\star }$
of
$h^{\star }$
of
 $h$
(i.e.,
$h$
(i.e.,
 $h\subseteq h^{\star }$
) such that
$h\subseteq h^{\star }$
) such that
 $h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}$
. If all matches of
$h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}$
. If all matches of
 $r$
are satisfied in
$r$
are satisfied in
 $\mathcal{I}$
, we say that r is satisfied in
$\mathcal{I}$
, we say that r is satisfied in
 $\mathcal{I}$
, denoted by
$\mathcal{I}$
, denoted by
 ${\mathcal{I}}\models r$
. For a rule program
${\mathcal{I}}\models r$
. For a rule program
 $\Sigma$
and database
$\Sigma$
and database
 ${\mathcal{D}}$
, instance
${\mathcal{D}}$
, instance
 $\mathcal{I}$
is a model of
$\mathcal{I}$
is a model of
 $\Sigma$
and
$\Sigma$
and
 ${\mathcal{D}}$
, denoted by
${\mathcal{D}}$
, denoted by
 ${\mathcal{I}} \models \Sigma ,{\mathcal{D}}$
, if
${\mathcal{I}} \models \Sigma ,{\mathcal{D}}$
, if
 ${\mathcal{D}}\subseteq {\mathcal{I}}$
and
${\mathcal{D}}\subseteq {\mathcal{I}}$
and
 ${\mathcal{I}}\models r$
for each
${\mathcal{I}}\models r$
for each
 $r\in \Sigma$
.
$r\in \Sigma$
.
Labeled nulls play the role of fresh constants without further specification, just like blank nodes in RDF or
 $N_3$
. The chase is a family of algorithms that soundly produces models of rule programs by continuously applying rules for unsatisfied matches. Rule heads are then instantiated and added to the instance. Existentially quantified variables are thereby replaced by (globally) fresh nulls in order to facilitate arbitrary constant injections. More formally, we call a sequence
$N_3$
. The chase is a family of algorithms that soundly produces models of rule programs by continuously applying rules for unsatisfied matches. Rule heads are then instantiated and added to the instance. Existentially quantified variables are thereby replaced by (globally) fresh nulls in order to facilitate arbitrary constant injections. More formally, we call a sequence
 ${\mathcal{D}}^0 {\mathcal{D}}^1 {\mathcal{D}}^2 \ldots$
a chase sequence of rule program
${\mathcal{D}}^0 {\mathcal{D}}^1 {\mathcal{D}}^2 \ldots$
a chase sequence of rule program
 $\Sigma$
and database
$\Sigma$
and database
 ${\mathcal{D}}$
if (1)
${\mathcal{D}}$
if (1)
 ${\mathcal{D}}^0 = {\mathcal{D}}$
and (2) for
${\mathcal{D}}^0 = {\mathcal{D}}$
and (2) for
 $i \gt 0$
,
$i \gt 0$
,
 ${\mathcal{D}}^i$
is obtained from
${\mathcal{D}}^i$
is obtained from
 ${\mathcal{D}}^{i-1}$
by applying a rule
${\mathcal{D}}^{i-1}$
by applying a rule
 $r\in \Sigma$
for match
$r\in \Sigma$
for match
 $h$
in
$h$
in
 ${\mathcal{D}}^{i-1}$
(i.e.,
${\mathcal{D}}^{i-1}$
(i.e.,
 $h \;:\; {\textsf {body}(r)} \to {\mathcal{D}}^{i-1}$
is an unsatisfied match and
$h \;:\; {\textsf {body}(r)} \to {\mathcal{D}}^{i-1}$
is an unsatisfied match and
 ${\mathcal{D}}^i = {\mathcal{D}}^{i-1} \cup \{ h^{\star }({\textsf {head}(r)}) \}$
for an extension
${\mathcal{D}}^i = {\mathcal{D}}^{i-1} \cup \{ h^{\star }({\textsf {head}(r)}) \}$
for an extension
 $h^{\star }$
of
$h^{\star }$
of
 $h$
). The chase of
$h$
). The chase of
 $\Sigma$
and
$\Sigma$
and
 ${\mathcal{D}}$
is the limit of a chase sequence
${\mathcal{D}}$
is the limit of a chase sequence
 ${\mathcal{D}}^0 {\mathcal{D}}^1 {\mathcal{D}}^2 \ldots$
, that is
${\mathcal{D}}^0 {\mathcal{D}}^1 {\mathcal{D}}^2 \ldots$
, that is
 $\bigcup _{i\geq 0} {\mathcal{D}}^0$
. Although chase sequences are not necessarily finite,Footnote
11
the chase always is a (possibly infinite) modelFootnote
12
(Deutsch et al. Reference Deutsch, Nash, Remmel, Lenzerini and Lembo2008). The described version of the chase is called standard chase or restricted chase.
$\bigcup _{i\geq 0} {\mathcal{D}}^0$
. Although chase sequences are not necessarily finite,Footnote
11
the chase always is a (possibly infinite) modelFootnote
12
(Deutsch et al. Reference Deutsch, Nash, Remmel, Lenzerini and Lembo2008). The described version of the chase is called standard chase or restricted chase.
We say that two rule programs
 $\Sigma _{1}$
and
$\Sigma _{1}$
and
 $\Sigma _{2}$
are equivalent, denoted
$\Sigma _{2}$
are equivalent, denoted
 $\Sigma _{1} {\mathrel {\leftrightarrows }} \Sigma _{2}$
, if for all instances
$\Sigma _{1} {\mathrel {\leftrightarrows }} \Sigma _{2}$
, if for all instances
 $\mathcal{I}$
,
$\mathcal{I}$
,
 ${\mathcal{I}}\models \Sigma _{1}$
if and only if
${\mathcal{I}}\models \Sigma _{1}$
if and only if
 ${\mathcal{I}}\models \Sigma _{2}$
. Equivalences of existential rules have been extensively studied in the framework of data exchange (Fagin et al. Reference Fagin, Kolaitis, Nash and Popa2008; Pichler et al. Reference Pichler, Sallinger and Savenkov2011). Our equivalence is very strong and is called logical equivalence in the data exchange literature. For an alternative equivalence relation between rule programs, we could have equally considered equality of ground models (i.e., those models that are null-free). Let us define this equivalence as follows:
${\mathcal{I}}\models \Sigma _{2}$
. Equivalences of existential rules have been extensively studied in the framework of data exchange (Fagin et al. Reference Fagin, Kolaitis, Nash and Popa2008; Pichler et al. Reference Pichler, Sallinger and Savenkov2011). Our equivalence is very strong and is called logical equivalence in the data exchange literature. For an alternative equivalence relation between rule programs, we could have equally considered equality of ground models (i.e., those models that are null-free). Let us define this equivalence as follows:
 $\Sigma _{1} {\mathrel {\leftrightarrows }}_{g} \Sigma _{2}$
if for each ground instance
$\Sigma _{1} {\mathrel {\leftrightarrows }}_{g} \Sigma _{2}$
if for each ground instance
 $\mathcal{I}$
,
$\mathcal{I}$
,
 ${\mathcal{I}}\models \Sigma _{1}$
if and only if
${\mathcal{I}}\models \Sigma _{1}$
if and only if
 ${\mathcal{I}}\models \Sigma _{2}$
. The following lemma helps simplifying the proofs concerning the correctness of our transformationFootnote
13
function later on.
${\mathcal{I}}\models \Sigma _{2}$
. The following lemma helps simplifying the proofs concerning the correctness of our transformationFootnote
13
function later on.
Lemma 4.1.
 $\mathrel {\leftrightarrows }$
and
$\mathrel {\leftrightarrows }$
and
 ${\mathrel {\leftrightarrows }}_{g}$
coincide.
${\mathrel {\leftrightarrows }}_{g}$
coincide.
Proof.
Of course,
 ${\mathrel {\leftrightarrows }}\subseteq {\mathrel {\leftrightarrows }}_{g}$
holds since since the set of all ground models of a rule program is a subset of all models of that program.
${\mathrel {\leftrightarrows }}\subseteq {\mathrel {\leftrightarrows }}_{g}$
holds since since the set of all ground models of a rule program is a subset of all models of that program.
Towards showing
 ${\mathrel {\leftrightarrows }}_{g}\subseteq {\mathrel {\leftrightarrows }}$
, assume rule programs
${\mathrel {\leftrightarrows }}_{g}\subseteq {\mathrel {\leftrightarrows }}$
, assume rule programs
 $\Sigma _{1}$
and
$\Sigma _{1}$
and
 $\Sigma _{2}$
such that
$\Sigma _{2}$
such that
 $\Sigma _{1}{\mathrel {\leftrightarrows }}_{g}\Sigma _{2}$
, but
$\Sigma _{1}{\mathrel {\leftrightarrows }}_{g}\Sigma _{2}$
, but ![]() . Then there is a model
. Then there is a model
 ${\mathcal{I}}[M]$
of
${\mathcal{I}}[M]$
of
 $\Sigma _{1}$
, such that
$\Sigma _{1}$
, such that ![]() (or vice versa), implying that for some rule
(or vice versa), implying that for some rule
 $r\in \Sigma _{2}$
there is a match
$r\in \Sigma _{2}$
there is a match
 $h$
in
$h$
in
 ${\mathcal{I}}[M]$
but for no extension
${\mathcal{I}}[M]$
but for no extension
 $h^{\star }$
, we get
$h^{\star }$
, we get
 $h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}[M]$
. As
$h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}[M]$
. As
 $\Sigma _{1}{\mathrel {\leftrightarrows }}_{g} \Sigma _{2}$
,
$\Sigma _{1}{\mathrel {\leftrightarrows }}_{g} \Sigma _{2}$
,
 ${\mathcal{I}}[M]$
cannot be a ground instance and, thus, contains at least one null.
${\mathcal{I}}[M]$
cannot be a ground instance and, thus, contains at least one null.
Claim: Because of
 ${\mathcal{I}}[M]$
, there is a ground instance
${\mathcal{I}}[M]$
, there is a ground instance
 ${\mathcal{I}}[M]_{g}$
, such that
${\mathcal{I}}[M]_{g}$
, such that
 ${\mathcal{I}}[M]_{g}\models \Sigma _{1}$
and
${\mathcal{I}}[M]_{g}\models \Sigma _{1}$
and ![]() . But then
. But then
 ${\mathcal{I}}[M]_{g}$
constitutes a counterexample to the assumption that
${\mathcal{I}}[M]_{g}$
constitutes a counterexample to the assumption that
 $\Sigma _{1}{\mathrel {\leftrightarrows }}_{g} \Sigma _{2}$
. Thus, the assumption
$\Sigma _{1}{\mathrel {\leftrightarrows }}_{g} \Sigma _{2}$
. Thus, the assumption ![]() would be disproven.
would be disproven.
In order to show the claim, we construct
 ${\mathcal{I}}[M]_{g}$
from
${\mathcal{I}}[M]_{g}$
from
 ${\mathcal{I}}[M]$
by replacing every null
${\mathcal{I}}[M]$
by replacing every null
 $n$
in
$n$
in
 ${\mathcal{I}}[M]$
by a (globally) fresh constant
${\mathcal{I}}[M]$
by a (globally) fresh constant
 $c_{n}$
. Since there might not be enough constants –
$c_{n}$
. Since there might not be enough constants –
 ${\mathcal{I}}[M]$
may already use all countably infinite constants
${\mathcal{I}}[M]$
may already use all countably infinite constants
 $c\in {\mathbf{C}}$
– we take a little detour: although the set of constants in use might be infinite in
$c\in {\mathbf{C}}$
– we take a little detour: although the set of constants in use might be infinite in
 ${\mathcal{I}}[M]$
, the number of constants used inside the rule programs
${\mathcal{I}}[M]$
, the number of constants used inside the rule programs
 $\Sigma _{1}$
and
$\Sigma _{1}$
and
 $\Sigma _{2}$
is finite.Footnote
14
Create instance
$\Sigma _{2}$
is finite.Footnote
14
Create instance
 ${\mathcal{I}}[M]''$
from
${\mathcal{I}}[M]''$
from
 ${\mathcal{I}}[M]$
by replacing all constants
${\mathcal{I}}[M]$
by replacing all constants
 $c$
not part of
$c$
not part of
 $\Sigma _{1}$
or
$\Sigma _{1}$
or
 $\Sigma _{2}$
by fresh nulls
$\Sigma _{2}$
by fresh nulls
 $n_{c}$
. Once again,
$n_{c}$
. Once again,
 ${\mathcal{I}}[M]$
may already use up all nulls
${\mathcal{I}}[M]$
may already use up all nulls
 $n\in {\mathbf{N}}$
. So we have to take yet another detour from
$n\in {\mathbf{N}}$
. So we have to take yet another detour from
 ${\mathcal{I}}[M]$
to
${\mathcal{I}}[M]$
to
 ${\mathcal{I}}[M]'$
as follows:
${\mathcal{I}}[M]'$
as follows:
Let
 $\gamma \;:\; {\mathbf{N}}\to \mathbb{N}$
be a (necessarily injective) enumeration of
$\gamma \;:\; {\mathbf{N}}\to \mathbb{N}$
be a (necessarily injective) enumeration of
 $\mathbf{N}$
. Define
$\mathbf{N}$
. Define
 $\eta \;:\; {\mathbf{C}}\cup {\mathbf{N}}\to {\mathbf{C}}\cup {\mathbf{N}}$
by (1)
$\eta \;:\; {\mathbf{C}}\cup {\mathbf{N}}\to {\mathbf{C}}\cup {\mathbf{N}}$
by (1)
 $\eta (c):=c$
for all
$\eta (c):=c$
for all
 $c\in {\mathbf{C}}$
and (2)
$c\in {\mathbf{C}}$
and (2)
 $\eta (n):= \eta ^{-1}(2\cdot \eta (n))$
. Then
$\eta (n):= \eta ^{-1}(2\cdot \eta (n))$
. Then
 ${\mathcal{I}}[M]'$
is produced by applying
${\mathcal{I}}[M]'$
is produced by applying
 $\eta$
to
$\eta$
to
 ${\mathcal{I}}[M]$
. Note, for each number
${\mathcal{I}}[M]$
. Note, for each number
 $k\in \mathbb{N}$
,
$k\in \mathbb{N}$
,
 $\eta ^{-1}(2k+1)$
is not a null in
$\eta ^{-1}(2k+1)$
is not a null in
 ${\mathcal{I}}[M]'$
. Since
${\mathcal{I}}[M]'$
. Since
 $\eta$
is an isomorphism between
$\eta$
is an isomorphism between
 ${\mathcal{I}}[M]$
and
${\mathcal{I}}[M]$
and
 ${\mathcal{I}}[M]'$
, we get that
${\mathcal{I}}[M]'$
, we get that
 ${\mathcal{I}}[M]\models \Sigma$
if and only if
${\mathcal{I}}[M]\models \Sigma$
if and only if
 ${\mathcal{I}}[M]'\models \Sigma$
for all rule programs
${\mathcal{I}}[M]'\models \Sigma$
for all rule programs
 $\Sigma$
. Recall that isomorphic models preserve all first-order sentences (see, e.g., Ebbinghaus et al. 1994). Hence,
$\Sigma$
. Recall that isomorphic models preserve all first-order sentences (see, e.g., Ebbinghaus et al. 1994). Hence,
 ${\mathcal{I}}[M]'\models \Sigma _{1}$
and
${\mathcal{I}}[M]'\models \Sigma _{1}$
and ![]() .
.
Next we construct
 ${\mathcal{I}}[M]''$
from
${\mathcal{I}}[M]''$
from
 ${\mathcal{I}}[M]'$
by function
${\mathcal{I}}[M]'$
by function
 $\omega$
mapping the terms occurring in
$\omega$
mapping the terms occurring in
 ${\mathcal{I}}[M]'$
to
${\mathcal{I}}[M]'$
to
 ${\mathbf{C}}\cup {\mathbf{N}}$
, such that (1)
${\mathbf{C}}\cup {\mathbf{N}}$
, such that (1)
 $\omega (c)=c$
if
$\omega (c)=c$
if
 $c$
is a constant occurring in
$c$
is a constant occurring in
 $\Sigma _{1}\cup \Sigma _{2}$
, (2)
$\Sigma _{1}\cup \Sigma _{2}$
, (2)
 $\omega (d)$
is a fresh null
$\omega (d)$
is a fresh null
 $n_{d}$
if
$n_{d}$
if
 $d$
is a constant not occurring in
$d$
is a constant not occurring in
 $\Sigma _{1}\cup \Sigma _{2}$
, and (3)
$\Sigma _{1}\cup \Sigma _{2}$
, and (3)
 $\omega (n)=n$
otherwise.
$\omega (n)=n$
otherwise.
 $\omega$
exists because the number of nulls in use by
$\omega$
exists because the number of nulls in use by
 ${\mathcal{I}}[M]'$
is countably infinite. Note that
${\mathcal{I}}[M]'$
is countably infinite. Note that
 $\omega$
is injective and
$\omega$
is injective and
 $\omega ({\mathcal{I}}[M]')={\mathcal{I}}[M]''$
uses only finitely many constants. Once again we show that
$\omega ({\mathcal{I}}[M]')={\mathcal{I}}[M]''$
uses only finitely many constants. Once again we show that
 ${\mathcal{I}}[M]'\models \Sigma$
if and only if
${\mathcal{I}}[M]'\models \Sigma$
if and only if
 ${\mathcal{I}}[M]''\models \Sigma$
for arbitrary rule programs
${\mathcal{I}}[M]''\models \Sigma$
for arbitrary rule programs
 $\Sigma$
, implying that
$\Sigma$
, implying that
 ${\mathcal{I}}[M]''\models \Sigma _{1}$
and
${\mathcal{I}}[M]''\models \Sigma _{1}$
and ![]() :
:
Let
 $r\in \Sigma$
with match
$r\in \Sigma$
with match
 $h$
in
$h$
in
 ${\mathcal{I}}[M]'$
. If
${\mathcal{I}}[M]'$
. If
 $h$
is satisfied in
$h$
is satisfied in
 ${\mathcal{I}}[M]'$
, then there is an extension
${\mathcal{I}}[M]'$
, then there is an extension
 $h^{\star }$
, such that
$h^{\star }$
, such that
 $h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}[M]'$
. By definition of
$h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}[M]'$
. By definition of
 $\omega$
and, thus, the construction of
$\omega$
and, thus, the construction of
 ${\mathcal{I}}[M]''$
,
${\mathcal{I}}[M]''$
,
 $\omega \circ h$
is a match for
$\omega \circ h$
is a match for
 $r$
in
$r$
in
 ${\mathcal{I}}[M]''$
and
${\mathcal{I}}[M]''$
and
 $\omega \circ h^{\star }$
its extension with
$\omega \circ h^{\star }$
its extension with
 $\omega \circ h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}[M]''$
. The converse direction uses the the same argumentation, now from
$\omega \circ h^{\star }({\textsf {head}(r)})\subseteq {\mathcal{I}}[M]''$
. The converse direction uses the the same argumentation, now from
 ${\mathcal{I}}[M]''$
to
${\mathcal{I}}[M]''$
to
 ${\mathcal{I}}[M]'$
, using the fact that
${\mathcal{I}}[M]'$
, using the fact that
 $\omega$
is injective.
$\omega$
is injective.
From
 ${\mathcal{I}}[M]''$
we can finally construct ground instance
${\mathcal{I}}[M]''$
we can finally construct ground instance
 ${\mathcal{I}}[M]_{g}$
by
${\mathcal{I}}[M]_{g}$
by
 $\nu$
mapping all (finitely many) constants
$\nu$
mapping all (finitely many) constants
 $c$
in
$c$
in
 ${\mathcal{I}}[M]''$
to themselves and every null
${\mathcal{I}}[M]''$
to themselves and every null
 $n$
in
$n$
in
 ${\mathcal{I}}[M]''$
to a fresh constant
${\mathcal{I}}[M]''$
to a fresh constant
 $c_{n}$
. It holds that
$c_{n}$
. It holds that
 ${\mathcal{I}}[M]''\models \Sigma$
if and only if
${\mathcal{I}}[M]''\models \Sigma$
if and only if
 $\nu ({\mathcal{I}}[M]'')={\mathcal{I}}[M]_{g} \models \Sigma$
(for all rule programs
$\nu ({\mathcal{I}}[M]'')={\mathcal{I}}[M]_{g} \models \Sigma$
(for all rule programs
 $\Sigma$
) by a similar argumentation as given in the step from
$\Sigma$
) by a similar argumentation as given in the step from
 ${\mathcal{I}}[M]'$
to
${\mathcal{I}}[M]'$
to
 ${\mathcal{I}}[M]''$
above. Thus,
${\mathcal{I}}[M]''$
above. Thus,
 ${\mathcal{I}}[M]_{g}\models \Sigma _{1}$
and
${\mathcal{I}}[M]_{g}\models \Sigma _{1}$
and ![]() , which completes proof.
, which completes proof.
4.2 The translation function from N3 to existential rules
The translation function
 $\mathcal{T}$
maps sets
$\mathcal{T}$
maps sets
 $F = \{ f_{1}, \ldots , f_{k} \}$
of
$F = \{ f_{1}, \ldots , f_{k} \}$
of
 ${N_3}^\exists$
formulae in PNF to existential rule programs
${N_3}^\exists$
formulae in PNF to existential rule programs
 $\Sigma$
. Before going into the intricates of
$\Sigma$
. Before going into the intricates of
 $\mathcal{T}$
for every type of piece, consider the auxiliary function
$\mathcal{T}$
for every type of piece, consider the auxiliary function
 ${\mathbb{T}} \;:\; C\cup E\cup U \to {\mathbf{C}}\cup {\mathbf{V}}$
mapping
${\mathbb{T}} \;:\; C\cup E\cup U \to {\mathbf{C}}\cup {\mathbf{V}}$
mapping
 $N_3$
terms to terms in our rule language (cf. previous subsection):
$N_3$
terms to terms in our rule language (cf. previous subsection):
 \begin{align*} {\mathbb{T}}(t) := \left \{ \begin{array}{ccl} {v_{\mathtt {x}}^{\forall }} && \text{if}t=\mathtt {? x}\in U \\ {v_{\mathtt {y}}^{\exists }} && \text{if}t=\mathtt {\_:y}\in E \\ t && \text{if} t\in C, \end{array}\right . \end{align*}
\begin{align*} {\mathbb{T}}(t) := \left \{ \begin{array}{ccl} {v_{\mathtt {x}}^{\forall }} && \text{if}t=\mathtt {? x}\in U \\ {v_{\mathtt {y}}^{\exists }} && \text{if}t=\mathtt {\_:y}\in E \\ t && \text{if} t\in C, \end{array}\right . \end{align*}
where
 ${v_{\mathtt {x}}^{\forall }},{v_{\mathtt {y}}^{\exists }}\in {\mathbf{V}}$
and
${v_{\mathtt {x}}^{\forall }},{v_{\mathtt {y}}^{\exists }}\in {\mathbf{V}}$
and
 $t\in {\mathbf{C}}$
(recall that
$t\in {\mathbf{C}}$
(recall that
 $C={\mathbf{C}}$
). While variables in
$C={\mathbf{C}}$
). While variables in
 $N_3$
belong to either
$N_3$
belong to either
 $E$
or
$E$
or
 $U$
, this separation is lost under function
$U$
, this separation is lost under function
 $\mathbb{T}$
. For enhancing readability of subsequent examples, the identity of variables preserves this information by using superscripts
$\mathbb{T}$
. For enhancing readability of subsequent examples, the identity of variables preserves this information by using superscripts
 $\exists$
and
$\exists$
and
 $\forall$
. Function
$\forall$
. Function
 $\mathbb{T}$
naturally extends to triples
$\mathbb{T}$
naturally extends to triples
 $g = \mathtt {t^{1} t^{2} t^{3}}$
:
$g = \mathtt {t^{1} t^{2} t^{3}}$
:
 ${\mathbb{T}}(g):={\textit {tr}}({\mathbb{T}}(t^{1}), {\mathbb{T}}(t^{2}), {\mathbb{T}}(t^{3}))$
. We provide the translation for every piece
${\mathbb{T}}(g):={\textit {tr}}({\mathbb{T}}(t^{1}), {\mathbb{T}}(t^{2}), {\mathbb{T}}(t^{3}))$
. We provide the translation for every piece
 $f_{i}\in F$
(
$f_{i}\in F$
(
 $1\leq i\leq k$
) and later collect the full translation of
$1\leq i\leq k$
) and later collect the full translation of
 $F$
as the union of its translated pieces.
$F$
as the union of its translated pieces.
4.2.1 Translating atomic pieces
If
 $f_{i}$
is an atomic piece,
$f_{i}$
is an atomic piece,
 $f_{i} = \mathtt {g_{1} g_{2} \ldots g_{l}}$
for some
$f_{i} = \mathtt {g_{1} g_{2} \ldots g_{l}}$
for some
 $l\geq 1$
and each
$l\geq 1$
and each
 $g_{j}$
(
$g_{j}$
(
 $1\leq j\leq l$
) is an atomic formula. The translation of
$1\leq j\leq l$
) is an atomic formula. The translation of
 $f_{i}$
is the singleton set
$f_{i}$
is the singleton set
 $\mathcal{T}(f_{i})=\{ \rightarrow \exists \mathbf{z} .\ {\mathbb{T}}(g_{1})\wedge {\mathbb{T}}(g_{2})\wedge \ldots \wedge {\mathbb{T}}(g_{l}) \}$
, where
$\mathcal{T}(f_{i})=\{ \rightarrow \exists \mathbf{z} .\ {\mathbb{T}}(g_{1})\wedge {\mathbb{T}}(g_{2})\wedge \ldots \wedge {\mathbb{T}}(g_{l}) \}$
, where
 $\mathbf{z}$
is the list of translated existential variables (via
$\mathbf{z}$
is the list of translated existential variables (via
 $\mathbb{T}$
) from existentials occurring in
$\mathbb{T}$
) from existentials occurring in
 $f_i$
. For example, the formula in (15) constitutes a single piece
$f_i$
. For example, the formula in (15) constitutes a single piece
 $f_(15)$
which translates to
$f_(15)$
which translates to
 \begin{equation*}\mathcal{T}(f_(15)) = \left \{ \rightarrow \exists {v_{\mathtt {\mathtt {y}}}^{\exists }} .\ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},{v_{\mathtt {\mathtt {y}}}^{\exists }}) \wedge {\textit {tr}}({v_{\mathtt {\mathtt {y}}}^{\exists }},\mathtt {:likes},\mathtt {:cake}) \right \}\text .\end{equation*}
\begin{equation*}\mathcal{T}(f_(15)) = \left \{ \rightarrow \exists {v_{\mathtt {\mathtt {y}}}^{\exists }} .\ {\textit {tr}}(\mathtt {:lucy},\mathtt {:knows},{v_{\mathtt {\mathtt {y}}}^{\exists }}) \wedge {\textit {tr}}({v_{\mathtt {\mathtt {y}}}^{\exists }},\mathtt {:likes},\mathtt {:cake}) \right \}\text .\end{equation*}
4.2.2 Translating rules
For rule-shaped pieces
 $f_{i} = \mathtt {\{e_1\}= \gt \{e_2\}}$
, we also obtain a single existential rule. Recall that our PNF ensures all variables in
$f_{i} = \mathtt {\{e_1\}= \gt \{e_2\}}$
, we also obtain a single existential rule. Recall that our PNF ensures all variables in
 $e_{1}$
to be universals and all universal variables in
$e_{1}$
to be universals and all universal variables in
 $e_{2}$
to also occur in
$e_{2}$
to also occur in
 $e_{1}$
. If
$e_{1}$
. If
 $e_{1} = \mathtt {g_{1}^{1} g_{1}^{2} \cdots g_{1}^{m}}$
and
$e_{1} = \mathtt {g_{1}^{1} g_{1}^{2} \cdots g_{1}^{m}}$
and
 $e_{2} = \mathtt {g_{2}^{1} g_{2}^{2} \cdots g_{2}^{n}}$
,
$e_{2} = \mathtt {g_{2}^{1} g_{2}^{2} \cdots g_{2}^{n}}$
,
 $\mathcal{T}(f_{i}):=\{ \forall \mathbf{x} .\ \bigwedge _{j=1}^{m} {\mathbb{T}}(g_{1}^{j}) \rightarrow \exists \mathbf{z} .\ \bigwedge _{j=1}^{n} {\mathbb{T}}(g_{2}^{j}) \}$
where
$\mathcal{T}(f_{i}):=\{ \forall \mathbf{x} .\ \bigwedge _{j=1}^{m} {\mathbb{T}}(g_{1}^{j}) \rightarrow \exists \mathbf{z} .\ \bigwedge _{j=1}^{n} {\mathbb{T}}(g_{2}^{j}) \}$
where
 $\mathbf{x}$
and
$\mathbf{x}$
and
 $\mathbf{z}$
are the lists of translated universals and existentials, respectively. Applying
$\mathbf{z}$
are the lists of translated universals and existentials, respectively. Applying
 $\mathcal{T}$
to the
$\mathcal{T}$
to the
 $N_3$
formula in (4), which is a piece according to Definition 3.3, we obtain
$N_3$
formula in (4), which is a piece according to Definition 3.3, we obtain
 \begin{equation*}\mathcal{T}(f_(4)) = \left \{ \forall {v_{\mathtt {\mathtt {x}}}^{\forall }}.\ {\textit {tr}}({v_{\mathtt {\mathtt {x}}}^{\forall }}, \mathtt {:knows}, \mathtt {:tom}) \rightarrow \exists {v_{\mathtt {\mathtt {y}}}^{\exists }} .\ {\textit {tr}}({v_{\mathtt {\mathtt {x}}}^{\forall }}, \mathtt {:knows}, {v_{\mathtt {\mathtt {y}}}^{\exists }}) \wedge {\textit {tr}}({v_{\mathtt {\mathtt {y}}}^{\exists }}, \mathtt {:name}, \mathtt {"Tom"}) \right \}\text ,\end{equation*}
\begin{equation*}\mathcal{T}(f_(4)) = \left \{ \forall {v_{\mathtt {\mathtt {x}}}^{\forall }}.\ {\textit {tr}}({v_{\mathtt {\mathtt {x}}}^{\forall }}, \mathtt {:knows}, \mathtt {:tom}) \rightarrow \exists {v_{\mathtt {\mathtt {y}}}^{\exists }} .\ {\textit {tr}}({v_{\mathtt {\mathtt {x}}}^{\forall }}, \mathtt {:knows}, {v_{\mathtt {\mathtt {y}}}^{\exists }}) \wedge {\textit {tr}}({v_{\mathtt {\mathtt {y}}}^{\exists }}, \mathtt {:name}, \mathtt {"Tom"}) \right \}\text ,\end{equation*}
which is the same rule as given in (8) up to a renaming of (bound) variables.
4.2.3 Translating the PNF
For a set
 $F = \{f_{1}, f_{2}, \ldots , f_{k}\}$
of
$F = \{f_{1}, f_{2}, \ldots , f_{k}\}$
of
 ${N_3}^\exists$
formulae in PNF,
${N_3}^\exists$
formulae in PNF,
 $\mathcal{T}(F)$
is the union of all translated constituents (i.e.,
$\mathcal{T}(F)$
is the union of all translated constituents (i.e.,
 $\mathcal{T}(F) := \bigcup _{i=1}^{k} \mathcal{T}(f_{i})$
). Please note that
$\mathcal{T}(F) := \bigcup _{i=1}^{k} \mathcal{T}(f_{i})$
). Please note that
 $\mathcal{T}$
does not exceed a polynomial overhead in its input size.
$\mathcal{T}$
does not exceed a polynomial overhead in its input size.
4.3 Correctness of the translation
Let
 $F$
be a set of
$F$
be a set of
 ${N_3}^\exists$
formulae in PNF. Its translation
${N_3}^\exists$
formulae in PNF. Its translation
 $\mathcal{T}(F)$
provides the following soundness guarantee: For every ground model
$\mathcal{T}(F)$
provides the following soundness guarantee: For every ground model
 ${\mathcal{I}}[M]$
of
${\mathcal{I}}[M]$
of
 $\mathcal{T}(F)$
, there is an interpretation of
$\mathcal{T}(F)$
, there is an interpretation of
 $F$
that is itself a model.
$F$
that is itself a model.
Theorem 4.2.
Let
 $F$
be a set of
$F$
be a set of
 ${N_3}^\exists$
formulae in PNF and
${N_3}^\exists$
formulae in PNF and
 ${\mathcal{I}}[M]$
a ground instance. Define the canonical interpretation of
${\mathcal{I}}[M]$
a ground instance. Define the canonical interpretation of
 ${\mathcal{I}}[M]$
by
${\mathcal{I}}[M]$
by
 $\mathfrak{I}({\mathcal{I}}[M]) = (C, \mathfrak{a}, \mathfrak{p})$
such that
$\mathfrak{I}({\mathcal{I}}[M]) = (C, \mathfrak{a}, \mathfrak{p})$
such that
-
•
$\mathfrak{a}(t) := t$
for all
$t\in C$
and
-
•
$\mathfrak{p}(p) := \{ (s,o) \mid {\textit {tr}}(s,p,o)\in {\mathcal{I}}[M] \}$
for all
$p\in C$
.




 ${\mathcal{I}}[M]$
is a model of
${\mathcal{I}}[M]$
is a model of
 $\mathcal{T}(F)$
if and only if
$\mathcal{T}(F)$
if and only if
 $\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
 $F$
.
$F$
.
Proof.
By induction on the number
 $k$
of pieces in
$k$
of pieces in
 $F = \{ f_{1}, f_{2}, \ldots , f_{k} \}$
:
$F = \{ f_{1}, f_{2}, \ldots , f_{k} \}$
:
Base: For
 $k=1$
,
$k=1$
,
 $F = \{ f \}$
and
$F = \{ f \}$
and
 $f$
is either (a) an atomic piece or (b) a rule, being the cases we need to distinguish.
$f$
is either (a) an atomic piece or (b) a rule, being the cases we need to distinguish.
-
(a)
$\mathcal{T}(F)=\mathcal{T}(f)=\{ \rightarrow \exists \mathbf{z} .\ \bigwedge _{i=1}^{n} {\textit {tr}}(s_{i}, p_{i}, o_{i}) \}$
. Every model of
$\mathcal{T}(F)$
satisfies its single rule, meaning that if
${\mathcal{I}}[M]$
is a model, there is a homomorphism
$h^{\star }$
from
$\mathcal{A} = \{ {\textit {tr}}(s_{i},p_{i},o_{i}) \mid 1\leq i\leq n \}$
to
${\mathcal{I}}[M]$
. From
${\mathcal{I}}[M]$
we get
$\mathfrak{I}({\mathcal{I}}[M])=(C,\mathfrak{a},\mathfrak{p})$
with
$(s_{i},o_{i})\in \mathfrak{p}(p_{i})$
for all
$i\in \{ 1,\ldots ,n \}$
. We need to show that
$\mathfrak{I}({\mathcal{I}}[M])$
is a model for
$F$
(i.e., for
$f$
).If
$f$
contains existentials (i.e.,
$\text{comp}(f)\cap E = W$
is nonempty), we need to find a substitution
$\mu \;:\; W \to C$
such that
$\mathfrak{I}({\mathcal{I}}[M]) \models f\mu$
. Define
$\mu \;:\; W \to C$
alongside
$h^{\star }$
:
$\mu (\mathtt {\_:y})=h^{\star }({v_{\mathtt {y}}^{\exists }})$
for each
$\mathtt {\_:y}\in W$
. For each atomic formula
$g_{j} = \mathtt {s_{j} p_{j} o_{j}}$
of
$f$
, we get
$\mathfrak{I}({\mathcal{I}}[M]) \models g_{j}\mu$
since
${\textit {tr}}(h^{\star }(s_{j}),h^{\star }(p_{j}),h^{\star }(o_{j}))\in {\mathcal{I}}[M]$
implies
$(h^{\star }(s_{j}),h^{\star }(o_{j}))\in \mathfrak{p}(h^{\star }(p_{j}))$
and, thus,
$(\mathfrak{a}(s_{j}\mu ),\mathfrak{a}(o_{j}\mu ))\in \mathfrak{p}(\mathfrak{a}(p_{j}\mu ))$
. This argument holds for every atomic formula
$g_{j}$
of
$f$
, implying
$\mathfrak{I}({\mathcal{I}}[M])\models F$
. The converse direction uses the same argumentation backwards, constructing
$h^{\star }$
from
$\mu$
. If
$f$
does not contain any existentials, then
$f$
is itself an atomic formula and the result follows as the special case
$n=1$
. -
(b) If
$F = \{ f \}$
and
$f= \mathtt {\{e_1\}= \gt \{e_2\}}$
, then
$\mathcal{T}(F)=\{ \forall \mathbf{x} .\ \varphi \rightarrow \exists \mathbf{z} .\ \psi \}$
where
$\varphi$
and
$\psi$
are translated conjunctions from
$e_{1}$
and
$e_{2}$
.Let
$\mathfrak{I}({\mathcal{I}}[M])$
be a model of
$F$
. To show that
${\mathcal{I}}[M]$
is a model of
$\mathcal{T}(F)$
, it suffices to prove, for each match
$h$
of the rule, the existence of an extension
$h^{\star }$
(of
$h$
), such that
$h^{\star }(\psi )\subseteq {\mathcal{I}}[M]$
. Let
$h$
be a match for the body of the rule and the body of the rule is a conjunction of atoms. Define
$\sigma$
with
$\sigma (\mathtt {? x}):= h({v_{\mathtt {x}}^{\forall }})$
for each universal variable in
$e_{1}$
.
$\sigma$
is a substitution such that
$\mathfrak{I}({\mathcal{I}}[M])\models e_{1}\sigma$
. In order to prove this claim, let
$\mathtt {s p o}$
be a triple in
$e_{1}$
. Hence,
${\textit {tr}}(s, p, o)\in \varphi$
and, by the choice of
$h$
,
${\textit {tr}}(h(s), h(p), h(o))\in {\mathcal{I}}[M]$
. This implies that
$(h(s), h(o))\in \mathfrak{p}(h(p))$
, which also implies
$(s\sigma , o\sigma )\in \mathfrak{p}(p\sigma )$
. As this argument holds for all triples in
$e_{1}$
, the claim follows. Please note that, as in case (a), this reasoning can be converted to construct a match
$h$
from a substitution
$\sigma$
.Since
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$f$
, there is a substitution
$\mu \;:\; \text{comp}(e_{2})\cap E \to C$
, such that
$\mathfrak{I}({\mathcal{I}}[M])\models e_{2}\sigma \mu$
. Define
$h^{\star } := h \cup \{ w\mapsto \mu (w) \mid w\in \text{comp}(e_{2})\cap E \}$
. It holds that
$h^{\star }$
satisfies match
$h$
since for each atomic formula
$\mathtt {s_{i} p_{i} o_{i}}$
of
$e_{2}$
, we get
$\mathfrak{a}(\mu (\sigma (s_{i})),\mu (\sigma (o_{i})))\in \mathfrak{p}(\mathfrak{a}(\mu (\sigma (p_{i}))))$
implying
${\textit {tr}}(\mu (\sigma (s_{i})), \mu (\sigma (p_{i}), \mu (\sigma (o_{i}))))\in {\mathcal{I}}[M]$
and
$h^{\star }({\mathbb{T}}(x))=\mu (\sigma (x))$
(
$x\in \{ s_{i}, p_{i}, o_{i} \}$
) providing a match for
${\textit {tr}}({\mathbb{T}}(s_{i}), {\mathbb{T}}(p_{i}), {\mathbb{T}}(o_{i}))$
(part of the head
$\psi$
). As this argument holds for all atomic formulae of
$e_{2}$
, match
$h$
is satisfied via
$h^{\star }$
. As before, the construction can be inverted, obtaining
$\mu$
from
$h^{\star }$
and
$\sigma$
from
$h$
, which completes the proof for this case.
























































































Step: Let
 $F = \{ f_{1}, f_{2}, \ldots , f_{k}, f_{k+1} \}$
be a set of
$F = \{ f_{1}, f_{2}, \ldots , f_{k}, f_{k+1} \}$
be a set of
 ${N_3}^\exists$
formulae in PNF. By induction hypothesis,
${N_3}^\exists$
formulae in PNF. By induction hypothesis,
 ${\mathcal{I}}[M]$
is a model of
${\mathcal{I}}[M]$
is a model of
 $\mathcal{T}(\{ f_{1}, f_{2}, \ldots , f_{k} \})$
if and only if
$\mathcal{T}(\{ f_{1}, f_{2}, \ldots , f_{k} \})$
if and only if
 $\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
 $\{ f_{1}, f_{2}, \cdots , f_{k} \}$
. Also by induction hypothesis,
$\{ f_{1}, f_{2}, \cdots , f_{k} \}$
. Also by induction hypothesis,
 ${\mathcal{I}}[M]$
is a model of
${\mathcal{I}}[M]$
is a model of
 $\mathcal{T}(\{ f_{k+1} \})$
iff
$\mathcal{T}(\{ f_{k+1} \})$
iff
 $\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
 $\{ f_{k+1} \}$
. Thus,
$\{ f_{k+1} \}$
. Thus,
 ${\mathcal{I}}[M]$
is a model of
${\mathcal{I}}[M]$
is a model of
 $\mathcal{T}(F)$
if and only if it is a model of
$\mathcal{T}(F)$
if and only if it is a model of
 $\mathcal{T}(\{ f_{1} f_{2} \cdots f_{k} \})$
and of
$\mathcal{T}(\{ f_{1} f_{2} \cdots f_{k} \})$
and of
 $\mathcal{T}(\{ f_{k+1} \})$
if and only if
$\mathcal{T}(\{ f_{k+1} \})$
if and only if
 $\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
 $\{ f_{1} f_{2} \cdots f_{k} \}$
and of
$\{ f_{1} f_{2} \cdots f_{k} \}$
and of
 $\{ f_{k+1} \}$
if and only if
$\{ f_{k+1} \}$
if and only if
 $\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
 $F$
.
$F$
.
Consequently, the only (ground) models
 $\mathcal{T}(F)$
has are models of the original set of
$\mathcal{T}(F)$
has are models of the original set of
 ${N_3}^\exists$
formulae
${N_3}^\exists$
formulae
 $F$
. To complete the correctness argument,
$F$
. To complete the correctness argument,
 $\mathcal{T}(F)$
can have only those models relating to the ones of
$\mathcal{T}(F)$
can have only those models relating to the ones of
 $F$
, which is also true by the following theorem.
$F$
, which is also true by the following theorem.
Theorem 4.3.
Let
 $\mathfrak{M}$
be an
$\mathfrak{M}$
be an
 $N_3$
interpretation, then there exists an instance
$N_3$
interpretation, then there exists an instance
 ${\mathcal{I}}[M]$
such that for each set
${\mathcal{I}}[M]$
such that for each set
 $F$
of
$F$
of
 ${N_3}^\exists$
formulae in PNF
${N_3}^\exists$
formulae in PNF
 \begin{equation*}\mathfrak{M}\models F \text{ if and only if } \mathfrak{I}({\mathcal{I}}[M])\models F\end{equation*}
\begin{equation*}\mathfrak{M}\models F \text{ if and only if } \mathfrak{I}({\mathcal{I}}[M])\models F\end{equation*}
(cf. Theorem 4.2 ).
Proof.
For
 $\mathfrak{M}=({\mathfrak{D}},\mathfrak{a},\mathfrak{p})$
, define
$\mathfrak{M}=({\mathfrak{D}},\mathfrak{a},\mathfrak{p})$
, define
 $\mathfrak{M}_g=(C,\mathfrak{b},\mathfrak{q})$
such that (a)
$\mathfrak{M}_g=(C,\mathfrak{b},\mathfrak{q})$
such that (a)
 $\mathfrak{b}$
is the identity on
$\mathfrak{b}$
is the identity on
 $C$
(i.e.,
$C$
(i.e.,
 $\mathfrak{b}(c)=c$
for all
$\mathfrak{b}(c)=c$
for all
 $c \in C$
) and (b)
$c \in C$
) and (b)
 $\mathfrak{q}(p) := \{ (s,o) \mid (\mathfrak{a}(s),\mathfrak{a}(o))\in \mathfrak{p}(\mathfrak{a}(p)) \}$
for all
$\mathfrak{q}(p) := \{ (s,o) \mid (\mathfrak{a}(s),\mathfrak{a}(o))\in \mathfrak{p}(\mathfrak{a}(p)) \}$
for all
 $p\in C$
. Based on
$p\in C$
. Based on
 $\mathfrak{M}_g$
, we can define instance
$\mathfrak{M}_g$
, we can define instance
 ${\mathcal{I}}[M] := \{ {\textit {tr}}(s,p,o) \mid (s,o)\in \mathfrak{q}(p) \}$
.
${\mathcal{I}}[M] := \{ {\textit {tr}}(s,p,o) \mid (s,o)\in \mathfrak{q}(p) \}$
.
Since
 $\mathfrak{I}({\mathcal{I}}[M]) = \mathfrak{M}_g$
, it remains to be shown that
$\mathfrak{I}({\mathcal{I}}[M]) = \mathfrak{M}_g$
, it remains to be shown that
 $\mathfrak{M}\models F$
if and only if
$\mathfrak{M}\models F$
if and only if
 $\mathfrak{M}_g \models F$
. We proceed by induction on (the number of pieces)
$\mathfrak{M}_g \models F$
. We proceed by induction on (the number of pieces)
 $|F|=k$
.
$|F|=k$
.
Base: If
 $k=1$
, then
$k=1$
, then
 $F = \{ f \}$
and two cases arise: (a)
$F = \{ f \}$
and two cases arise: (a)
 $f$
is an atomic piece
$f$
is an atomic piece
 $\mathtt {g_1 \cdots g_l}$
(for some
$\mathtt {g_1 \cdots g_l}$
(for some
 $l \geq 1$
) and (b)
$l \geq 1$
) and (b)
 $f$
is an
$f$
is an
 $N_3$
rule
$N_3$
rule
 $\mathtt {\{e_1\}= \gt \{e_2\}}$
.
$\mathtt {\{e_1\}= \gt \{e_2\}}$
.
-
(a)
$\mathfrak{M}\models f$
if and only if
$\mathfrak{M}\models f\mu$
for some
$\mu \;:\; \text{comp}(f)\cap E \to C$
if and only if for each atomic formula
$g_i = \mathtt {s_i p_i o_i}$
in
$f$
,
$(\mathfrak{a}(\mu (s_i)),\mathfrak{a}(\mu (o_i)))\in \mathfrak{p}(\mathfrak{a}(\mu (p_i)))$
(by the semantics of
${N_3}^\exists$
) if and only if
$(\mathfrak{b}(\mu (s_i)),\mathfrak{b}(\mu (o_i)))\in \mathfrak{q}(\mathfrak{b}(\mu (p_i)))$
(by construction of
$\mathfrak{M}_g$
) if and only if
$\mathfrak{M}_g\models f\mu$
if and only if
$\mathfrak{M}_g\models f$
(by the semantics of
${N_3}^\exists$
). -
(b)
$\mathfrak{M}\models f$
if and only if, for each substitution
$\sigma \;:\; U \to C$
with
$\mathfrak{M}\models e_{1}\sigma$
, there is a substitution
$\mu \;:\; \text{comp}(e_2) \cap E \to C$
such that
$\mathfrak{M}\models e_{2}\sigma \mu$
.For respective substitutions
$\sigma \;:\; U \to C$
and
$\mu \;:\; \text{comp}(e_{2})\cap E \to C$
,
$\mathfrak{M}\models e_{1}\sigma$
if and only if
$(\mathfrak{a}(\sigma (s)),\mathfrak{a}(\sigma (o)))\in \mathfrak{p}(\mathfrak{a}(\sigma (p)))$
for each atomic formula
$\mathtt {s p o}$
in
$e_{1}$
(by the semantics of
${N_3}^\exists$
) if and only if
$(\mathfrak{b}(\sigma (s)),\mathfrak{b}(\sigma (o)))\in \mathfrak{q}(\mathfrak{b}(\sigma (p)))$
for each atomic formula
$\mathtt {s\;p\;o}$
of
$e_{1}$
if and only if
$\mathfrak{M}_g\models e_{1}\sigma$
.The same argument can be used to argue for
$\mathfrak{M}\models e_{2}\sigma \mu$
if and only if
$\mathfrak{M}_g\models e_{2}\sigma \mu$
. Thus, for each
$\sigma \;:\; U \to C$
for which
$\mathfrak{M}\models e_{1}\sigma$
there is a substitution
$\mu \;:\; \text{comp}(e_{2})\cap E \to C$
such that
$\mathfrak{M}\models e_{2}\sigma \mu$
and we obtain
$\mathfrak{M}_g\models e_{1}\sigma$
and
$\mathfrak{M}_g\models e_{2}\sigma \mu$
, and vice versa.




































Step: For
 $F=\{ f_{1}, \ldots , f_{k}, f_{k+1} \}$
, the induction hypothesis applies to
$F=\{ f_{1}, \ldots , f_{k}, f_{k+1} \}$
, the induction hypothesis applies to
 $F'=\{ f_{1}, \ldots , f_{k} \}$
and
$F'=\{ f_{1}, \ldots , f_{k} \}$
and
 $F'' = \{ f_{k+1} \}$
:
$F'' = \{ f_{k+1} \}$
:
 \begin{align*} \mathfrak{M}\models F\quad & \text{iff}\quad \mathfrak{M}\models F' \text{ and } \mathfrak{M}\models F'' &\text{(by theorem 3.1)}\\ &\text{iff}\quad \mathfrak{M}_g\models F' \text{ and } \mathfrak{M}_g\models F'' & \text{(by induction hypothesis)}\\ & \text{iff}\quad \mathfrak{M}_g\models F & \text{ (by theorem 3.1)} \end{align*}
\begin{align*} \mathfrak{M}\models F\quad & \text{iff}\quad \mathfrak{M}\models F' \text{ and } \mathfrak{M}\models F'' &\text{(by theorem 3.1)}\\ &\text{iff}\quad \mathfrak{M}_g\models F' \text{ and } \mathfrak{M}_g\models F'' & \text{(by induction hypothesis)}\\ & \text{iff}\quad \mathfrak{M}_g\models F & \text{ (by theorem 3.1)} \end{align*}
In the conference version of this paper, we have shown the following result to justify correctness of
 $\mathcal{T}$
, relating equivalent
$\mathcal{T}$
, relating equivalent
 $N_3$
formulae to their translations.
$N_3$
formulae to their translations.
Corollary 4.4 (Theorem 2 (Arndt and Mennicke 2023a)). For sets of
 ${N_3}^\exists$
formulae
${N_3}^\exists$
formulae
 $F$
and
$F$
and
 $G$
in PNF,
$G$
in PNF,
 $F {\mathrel {\equiv }} G$
if and only if
$F {\mathrel {\equiv }} G$
if and only if
 $\mathcal{T}(F) {\mathrel {\leftrightarrows }} \mathcal{T}(G)$
.
$\mathcal{T}(F) {\mathrel {\leftrightarrows }} \mathcal{T}(G)$
.
This kind of correctness argument has been coined to the term of full abstraction (Gorla and Nestmann Reference Gorla and Nestmann2016).
Proof.
Let
 $F$
and
$F$
and
 $G$
be sets of
$G$
be sets of
 ${N_3}^\exists$
formulae in PNF. The proof disects the statement in its two logical parts:
${N_3}^\exists$
formulae in PNF. The proof disects the statement in its two logical parts:
-
Soundness (
$\Rightarrow$
) Assume
$F {\mathrel {\equiv }} G$
. We need to show that
$\mathcal{T}(F) {\mathrel {\leftrightarrows }} \mathcal{T}(G)$
. Let
${\mathcal{I}}[M]$
be a ground model of
$\mathcal{T}(F)$
. Then by Theorem4.2,
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$F$
. By assumption (
$F {\mathrel {\equiv }} G$
),
$\mathfrak{I}({\mathcal{I}}[M])$
is a model of
$G$
and, again by an application of Theorem4.2, we get that
${\mathcal{I}}[M]$
must be a model of
$\mathcal{T}(G)$
. Hence,
$\mathcal{T}(F) {\mathrel {\leftrightarrows }}_g \mathcal{T}(G)$
which implies
$\mathcal{T}(F) {\mathrel {\leftrightarrows }} \mathcal{T}(G)$
by Lemma 4.1. The converse direction, starting from ground models of
$\mathcal{T}(G)$
, uses the inverse argumentation. -
Completeness (
$\Leftarrow$
) We prove the contrapositive: implies . Assume . Then there is a model
$\mathfrak{M}$
such that
$\mathfrak{M} \models F$
and , or vice versa. Since the cases are symmetric, without loss of generality, assume
$\mathfrak{M} \models F$
and and suppose, towards a contradiction, that
$\mathbf{(\star )}$
$\mathcal{T}(F) {\mathrel {\leftrightarrows }} \mathcal{T}(G)$
. By Theorem4.3, there is an instance
${\mathcal{I}}[M]$
such that
$\mathfrak{M} \models H$
if and only if
$\mathfrak{I}({\mathcal{I}}[M]) \models H$
for arbitrary sets
$H$
of
${N_3}^\exists$
formulae in PNF. Thus,
$\mathfrak{I}({\mathcal{I}}[M]) \models F$
and
$\mathbf{(\star \star )}$
. By Theorem4.2, we get that
${\mathcal{I}}[M] \models \mathcal{T}(F)$
and, by assumption
$\mathbf{(\star )}$
,
${\mathcal{I}}[M] \models \mathcal{T}(G)$
. But then Theorem4.2 allows for the conclusion that
$\mathfrak{I}({\mathcal{I}}[M]) \models G$
, contradicting
$\mathbf{(\star \star )}$
. Therefore, the assumption
$\mathbf{(\star )}$
is false, meaning .


































In the conference version of this paper, Corollary 4.4 originated from the attempt to evade trivial and/or unexpectedly simple yet undesirable transformations, which our transformation function
 $\mathcal{T}$
does not belong to because it possesses even stronger guarantees as proven in Theorems4.2 and 4.3. For instance, consider a translation
$\mathcal{T}$
does not belong to because it possesses even stronger guarantees as proven in Theorems4.2 and 4.3. For instance, consider a translation
 $\mathcal{T}_0$
mapping all sets of
$\mathcal{T}_0$
mapping all sets of
 ${N_3}^\exists$
formulae in PNF to some fixed set of rules
${N_3}^\exists$
formulae in PNF to some fixed set of rules
 $\Sigma _0$
(e.g.,
$\Sigma _0$
(e.g.,
 $\Sigma _0 = \emptyset$
). This translation is surely sound since the image of
$\Sigma _0 = \emptyset$
). This translation is surely sound since the image of
 $\mathcal{T}_0$
consists of the single set of rules
$\mathcal{T}_0$
consists of the single set of rules
 $\Sigma _0$
, being trivially equivalent to itself. On the other hand, requiring completeness rules out
$\Sigma _0$
, being trivially equivalent to itself. On the other hand, requiring completeness rules out
 $\mathcal{T}_0$
as a good transformation, since also non-equivalent
$\mathcal{T}_0$
as a good transformation, since also non-equivalent
 $N_3$
formulae map to the same (i.e., equivalent) rule program.
$N_3$
formulae map to the same (i.e., equivalent) rule program.
While
 $\mathcal{T}_0$
can be ruled out as trivially incomplete by Corollary 4.4, undesirable transformations are still in reach: Consider an arbitrary enumeration of equivalence classes of sets of
$\mathcal{T}_0$
can be ruled out as trivially incomplete by Corollary 4.4, undesirable transformations are still in reach: Consider an arbitrary enumeration of equivalence classes of sets of
 ${N_3}^\exists$
formulae in PNF
${N_3}^\exists$
formulae in PNF
 $\mathfrak{F}_1, \mathfrak{F}_2, \mathfrak{F}_3, \ldots$
and for each of these classes a first (e.g., the lexicographically smallest) element
$\mathfrak{F}_1, \mathfrak{F}_2, \mathfrak{F}_3, \ldots$
and for each of these classes a first (e.g., the lexicographically smallest) element
 $\mathbf{1^{st}}(\mathfrak{F}_i)$
. Define
$\mathbf{1^{st}}(\mathfrak{F}_i)$
. Define
 $\mathcal{T}_1(F) := \mathcal{T}(\mathbf{1^{st}}(\mathfrak{F}_{i+1}))$
if
$\mathcal{T}_1(F) := \mathcal{T}(\mathbf{1^{st}}(\mathfrak{F}_{i+1}))$
if
 $F \in \mathfrak{F}_i$
.
$F \in \mathfrak{F}_i$
.
 $\mathcal{T}_1$
is sound and complete in the sense of Corollary 4.4, but fails in having stronger guarantees on the relationship between the different semantic worlds.
$\mathcal{T}_1$
is sound and complete in the sense of Corollary 4.4, but fails in having stronger guarantees on the relationship between the different semantic worlds.
 $\mathcal{T}_1(F)$
may end up with a rule program that speaks about a completely different vocabulary – in consequence, completely different subjects – than
$\mathcal{T}_1(F)$
may end up with a rule program that speaks about a completely different vocabulary – in consequence, completely different subjects – than
 $F$
does. Even worse, the correctness of
$F$
does. Even worse, the correctness of
 $\mathcal{T}_1$
does not even require the intermediate transformation
$\mathcal{T}_1$
does not even require the intermediate transformation
 $\mathcal{T}$
to be correct in any way: different equivalence classes must just be associated with (semantically) different rule programs.
$\mathcal{T}$
to be correct in any way: different equivalence classes must just be associated with (semantically) different rule programs.
 $\mathcal{T}_0$
is incomplete with respect to Corollary 4.4.
$\mathcal{T}_0$
is incomplete with respect to Corollary 4.4.
 $\mathcal{T}_1$
on the other hand satisfies Corollary 4.4 but it does not share the same strong characteristics of
$\mathcal{T}_1$
on the other hand satisfies Corollary 4.4 but it does not share the same strong characteristics of
 $\mathcal{T}$
proven in Theorems4.2 and 4.3: Models of translated formulas cannot easily be converted into models of the original
$\mathcal{T}$
proven in Theorems4.2 and 4.3: Models of translated formulas cannot easily be converted into models of the original
 $N_3$
formula, making such transformations hard to use in contexts in which we want to employ existential rule reasoning as alternatives to existing
$N_3$
formula, making such transformations hard to use in contexts in which we want to employ existential rule reasoning as alternatives to existing
 $N_3$
reasoners. In retrospect, the connection between
$N_3$
reasoners. In retrospect, the connection between
 $N_3$
models and models of existential rules through
$N_3$
models and models of existential rules through
 $\mathcal{T}$
turns out to be much deeper than captured by Corollary 4.4 alone. This depth has been exploited within the proof of Corollary 4.4 that used to be available in our technical appendix (Arndt and Mennicke Reference Arndt and Mennicke2023b) only. Nevertheless, most parts of the original proofs are kept and allow for the stronger statements we now describe by Theorems4.2 and 4.3. The new and stronger formulation is meaningful to reasoning since all reasoning results can be translated back-and-forth through
$\mathcal{T}$
turns out to be much deeper than captured by Corollary 4.4 alone. This depth has been exploited within the proof of Corollary 4.4 that used to be available in our technical appendix (Arndt and Mennicke Reference Arndt and Mennicke2023b) only. Nevertheless, most parts of the original proofs are kept and allow for the stronger statements we now describe by Theorems4.2 and 4.3. The new and stronger formulation is meaningful to reasoning since all reasoning results can be translated back-and-forth through
 $\mathcal{T}$
. It is the combination of Theorems 4.2 and 4.3 and Corollary 4.4 that makes our function
$\mathcal{T}$
. It is the combination of Theorems 4.2 and 4.3 and Corollary 4.4 that makes our function
 $\mathcal{T}$
a useful contribution. Note that similar (and further) issues regarding full abstraction have been uncovered in other communities before (Gorla and Nestmann Reference Gorla and Nestmann2016; Parrow Reference Parrow2016).
$\mathcal{T}$
a useful contribution. Note that similar (and further) issues regarding full abstraction have been uncovered in other communities before (Gorla and Nestmann Reference Gorla and Nestmann2016; Parrow Reference Parrow2016).
Apart from correctness of
 $\mathcal{T}$
and the close connection between
$\mathcal{T}$
and the close connection between
 $N_3$
models and models of transformed
$N_3$
models and models of transformed
 ${N_3}^\exists$
formulae, we have no further guarantees. As
${N_3}^\exists$
formulae, we have no further guarantees. As
 ${N_3}^\exists$
reasoning does not necessarily stop, there is no need for termination of the chase over translated rule programs. We expect that the similarity between the identified
${N_3}^\exists$
reasoning does not necessarily stop, there is no need for termination of the chase over translated rule programs. We expect that the similarity between the identified
 $N_3$
fragment of
$N_3$
fragment of
 ${N_3}^\exists$
and existential rules allows for the adoption of sufficient conditions for finite models, for instance, by means of acyclicity (see Cuenca Grau et al. Reference Cuenca grau, Horrocks, Krötzsch, Kupke, Magka, Motik and Wang2013 for a survey).
${N_3}^\exists$
and existential rules allows for the adoption of sufficient conditions for finite models, for instance, by means of acyclicity (see Cuenca Grau et al. Reference Cuenca grau, Horrocks, Krötzsch, Kupke, Magka, Motik and Wang2013 for a survey).
5 Reasoning with lists
So far, we discussed
 ${N_3}^{\exists }$
as a fragment of
${N_3}^{\exists }$
as a fragment of
 $N_3$
which can directly be mapped to existential rules. In this section, we detail how
$N_3$
which can directly be mapped to existential rules. In this section, we detail how
 ${N_3}^{\exists }$
and our translation to existential rules can be extended towards supporting lists. Lists is a very important concept in
${N_3}^{\exists }$
and our translation to existential rules can be extended towards supporting lists. Lists is a very important concept in
 $N_3$
. We first explain them in more detail and provide their semantics. Then we explain how lists and list functions can be covered by existential rules. We finish the section by discussing different ways to implement list functions in
$N_3$
. We first explain them in more detail and provide their semantics. Then we explain how lists and list functions can be covered by existential rules. We finish the section by discussing different ways to implement list functions in
 $N_3$
.
$N_3$
.
5.1
$N_3$
lists

Before introducing them formally, we explain the role of lists in Notation3 Logic by examples.
 $N_3$
is based on RDF, but, in contrast to RDF, N3 treats lists as first-class citizens. To illustrate this, we take a closer look at the following triple containing a list:
$N_3$
is based on RDF, but, in contrast to RDF, N3 treats lists as first-class citizens. To illustrate this, we take a closer look at the following triple containing a list:
 \begin{equation} \mathtt {:lucy\;\;:likes (:cake\;\;:chocolate\;\;:tea).} \end{equation}
\begin{equation} \mathtt {:lucy\;\;:likes (:cake\;\;:chocolate\;\;:tea).} \end{equation}
Stating that lucy likes cake, chocolate and tea. If we understand the above as an example of RDF-turtle (Beckett et al. Reference Beckett, Berners-Lee, Prud’hommeaux and Carothers2014), the list-notation ( ) is syntactic sugar for:
 \begin{align} & \mathtt {:lucy\;\;:likes\;\;\_:l1. }\\ & \mathtt {\_:l1 rdf:first\;\;:cake; rdf:rest\;\;\_:l2.}\nonumber \\ &\mathtt {\_:l2 rdf:first\;\;:chocolate; rdf:rest\;\;\_l3.}\nonumber \\ &\mathtt {\_:l3 rdf:first\;\;:tea; rdf:rest rdf:nil.} \nonumber \end{align}
\begin{align} & \mathtt {:lucy\;\;:likes\;\;\_:l1. }\\ & \mathtt {\_:l1 rdf:first\;\;:cake; rdf:rest\;\;\_:l2.}\nonumber \\ &\mathtt {\_:l2 rdf:first\;\;:chocolate; rdf:rest\;\;\_l3.}\nonumber \\ &\mathtt {\_:l3 rdf:first\;\;:tea; rdf:rest rdf:nil.} \nonumber \end{align}
According to RDF semantics the predicates rdf:first and rdf:rest are properties whose domain is the class of lists, for rdf:rest the range is the class of lists and rdf:nil is itself a list. Their meaning is not specified any further.
In
 $N_3$
, the list in (16) itself is understood as a resource and not just as syntactic sugar for (17). The predicates rdf:first and rdf:rest have a more specific meaning: they stand for the relation between a list and its first element, a list and its rest list, that is the list, we obtain if we remove the first element, respectively. The rule
$N_3$
, the list in (16) itself is understood as a resource and not just as syntactic sugar for (17). The predicates rdf:first and rdf:rest have a more specific meaning: they stand for the relation between a list and its first element, a list and its rest list, that is the list, we obtain if we remove the first element, respectively. The rule
 \begin{equation} \mathtt {\{ \;(:a\;\;:b\;\;:c)\;\; rdf:first\;\;?x;\;\;rdf:rest\;\;?y\}= \gt \{?x\;\;:and\;\;?y\}.} \end{equation}
\begin{equation} \mathtt {\{ \;(:a\;\;:b\;\;:c)\;\; rdf:first\;\;?x;\;\;rdf:rest\;\;?y\}= \gt \{?x\;\;:and\;\;?y\}.} \end{equation}
for example, yields
 \begin{equation} \mathtt { :a\;\;:and (:b\;\;:c).} \end{equation}
\begin{equation} \mathtt { :a\;\;:and (:b\;\;:c).} \end{equation}
The constant rdf:nil stands for the empty list and can also be written as ( ).
If we define the semantics in a naive way,
 $N_3$
’s view of lists is not fully compatible with the (syntactic sugar) view of RDF. Suppose, we have a new triple stating the food preferences of Tom (which coincide with Lucy’s preferences):
$N_3$
’s view of lists is not fully compatible with the (syntactic sugar) view of RDF. Suppose, we have a new triple stating the food preferences of Tom (which coincide with Lucy’s preferences):
 \begin{equation} \mathtt {:tom\;\;:likes\;\;(:cake\;\;:chocolate\;\;:tea).} \end{equation}
\begin{equation} \mathtt {:tom\;\;:likes\;\;(:cake\;\;:chocolate\;\;:tea).} \end{equation}
If we apply the
 $N_3$
rule
$N_3$
rule
 \begin{equation} \mathtt {\{?x\;\;:likes\;\;?z.\;\;?y\;\;:likes\;\;?z\}= \gt \{?x\;\;:sharesPreferencesWith\;\;?y\}.} \end{equation}
\begin{equation} \mathtt {\{?x\;\;:likes\;\;?z.\;\;?y\;\;:likes\;\;?z\}= \gt \{?x\;\;:sharesPreferencesWith\;\;?y\}.} \end{equation}
on triple (20) and (16), we retrieveFootnote 15 that
 \begin{equation} \mathtt {:lucy\;\;:sharesPreferencesWith\;\;:tom.} \end{equation}
\begin{equation} \mathtt {:lucy\;\;:sharesPreferencesWith\;\;:tom.} \end{equation}
Now, we replace (20) by the first-rest combination it stands for, namely
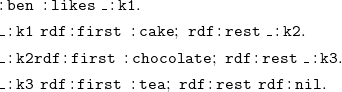 \begin{align} & \mathtt {:ben\;\;:likes\;\;\_:k1. } \\ & \mathtt {\_:k1\;\;rdf:first\;\;:cake;\;\;rdf:rest\;\;\_:k2.}\nonumber \\ &\mathtt {\_:k2 rdf:first\;\;:chocolate;\;\;rdf:rest\;\;\_:k3.}\nonumber \\ &\mathtt {\_:k3\;\;rdf:first\;\;:tea;\;\;rdf:rest\;\;rdf:nil.} \nonumber \end{align}
\begin{align} & \mathtt {:ben\;\;:likes\;\;\_:k1. } \\ & \mathtt {\_:k1\;\;rdf:first\;\;:cake;\;\;rdf:rest\;\;\_:k2.}\nonumber \\ &\mathtt {\_:k2 rdf:first\;\;:chocolate;\;\;rdf:rest\;\;\_:k3.}\nonumber \\ &\mathtt {\_:k3\;\;rdf:first\;\;:tea;\;\;rdf:rest\;\;rdf:nil.} \nonumber \end{align}
If we again apply rule (21), but this time on the list representations (17) and (23), it is not evident that we get triple (22) as a result. The lists are represented by blank nodes _:l1 and _:k1, and it is not immediately clear that these refer to the same list. The original informal
 $N_3$
specification overcomes the problems caused by the different representations by providing the following three axioms (Berners-Lee et al. Reference Berners-Lee, Connolly, Kagal, Scharf and Hendler2008; Berners-Lee and Connolly Reference Berners-Lee and Connolly2011):
$N_3$
specification overcomes the problems caused by the different representations by providing the following three axioms (Berners-Lee et al. Reference Berners-Lee, Connolly, Kagal, Scharf and Hendler2008; Berners-Lee and Connolly Reference Berners-Lee and Connolly2011):
Existence of Lists All lists exist. That is, the triple [rdf:first :a; rdf:rest rdf:nil]. does not carry any new information.
Uniqueness of Lists Two lists having the same rdf:first-element and also the same rdf:rest-element are equal. If we add the notion of equalityFootnote 16 (=): {?L1 rdf:first ?X; rdf:rest ?R. ?L12 rdf:first ?X; rdf:rest ?R.} = > {?L1 = ?L2}.
Functionality The predicates rdf:first and rdf:rest are functional properties. If we again add equality (=): {?S rdf:first ?O1, ?O2.}= > {?O1 = ?O2}. {?S rdf:rest ?O1, ?O2.}= > {?O1 = ?O2}.
The first axiom guarantees that there is no new informaion added when translating from the native list notation (16) to the first-rest noation (17). The second and the third are important for the other direction, and, in a modified version, also for the purposes of our research which is to express
 $N_3$
lists and list predicates by means of existential rules. We will come back to that in Subsection 5.2.
$N_3$
lists and list predicates by means of existential rules. We will come back to that in Subsection 5.2.
Before introducing the non-basic list predicates, we provide the syntax and semantics of the extension of
 ${N_3}{}^{\exists }$
with basic lists. We start with the syntax and extend the grammar provided in Figure 1 as follows:
${N_3}{}^{\exists }$
with basic lists. We start with the syntax and extend the grammar provided in Figure 1 as follows:
-
• the set
$\mathtt {t}$
of term additionally contains the empty list () and the concept (l) of list terms, with
\begin{align*} \mathtt {l\;\;::= }&\\ & \mathtt {t}\\ & \mathtt {l\;\;t} \end{align*}
-
• the set
$\mathtt {n}$
of N3 terms additionally contains the concept (k) of N3 list terms, with
\begin{align*} \mathtt {k\;\;::= }&\\ & \mathtt {n}\\ & \mathtt {k\;\;n} \end{align*}




We further need to extend the application of a substitution introduced in Subsection 3.2 by
 $\mathtt {(t}_1 \ldots \mathtt {t}_n\mathtt {)}\sigma = \mathtt {(t}_1\sigma \ldots \mathtt {t}_n\sigma \mathtt {)}$
if
$\mathtt {(t}_1 \ldots \mathtt {t}_n\mathtt {)}\sigma = \mathtt {(t}_1\sigma \ldots \mathtt {t}_n\sigma \mathtt {)}$
if
 $x= \mathtt {(t}_1 \ldots \mathtt {t}_n\mathtt {)}$
is a list, and the object function
$x= \mathtt {(t}_1 \ldots \mathtt {t}_n\mathtt {)}$
is a list, and the object function
 $\mathfrak{a}$
of N3 interpretations
$\mathfrak{a}$
of N3 interpretations
 $\mathfrak{I}=(\mathfrak{D}, \mathfrak{a}, \mathfrak{p})$
as follows: If
$\mathfrak{I}=(\mathfrak{D}, \mathfrak{a}, \mathfrak{p})$
as follows: If
 $\mathtt {t}=\mathtt {(t}_1 \ldots \mathtt {t}_n\mathtt {)}$
then
$\mathtt {t}=\mathtt {(t}_1 \ldots \mathtt {t}_n\mathtt {)}$
then
 $\mathfrak{a}(\mathtt {t})=(\mathfrak{a} (\mathtt {t}_1) \ldots \mathfrak{a}(\mathtt {t}_n))$
. If
$\mathfrak{a}(\mathtt {t})=(\mathfrak{a} (\mathtt {t}_1) \ldots \mathfrak{a}(\mathtt {t}_n))$
. If
 $\mathtt {t}=\mathtt {()}$
then
$\mathtt {t}=\mathtt {()}$
then
 $\mathfrak{a}(\mathtt {t})=()$
.
$\mathfrak{a}(\mathtt {t})=()$
.
Note, that with our extension the domain
 $\mathfrak{D}$
of a model for a graph containing a list term also needs to contain a list of domain elements. However, the number of lists necessarily contained in
$\mathfrak{D}$
of a model for a graph containing a list term also needs to contain a list of domain elements. However, the number of lists necessarily contained in
 $\mathfrak{D}$
is determined by the number of lists which can be produced using the alphabet. It is countable and does not depend on
$\mathfrak{D}$
is determined by the number of lists which can be produced using the alphabet. It is countable and does not depend on
 $\mathfrak{D}$
itself. If
$\mathfrak{D}$
itself. If
 $\mathfrak{D}$
contains all lists which can be constructed using the interpretations of the
$\mathfrak{D}$
contains all lists which can be constructed using the interpretations of the
 $N_3$
terms, then axiom 1 (existence of lists) is fulfilled.
$N_3$
terms, then axiom 1 (existence of lists) is fulfilled.
We finish the definition of the semantics of
 ${N_3}{}^{\exists }$
with basic lists as follows:
${N_3}{}^{\exists }$
with basic lists as follows:
Given an
 $N_3$
alphabet which contains the list constants rdf:first and rdf:rest, and an
$N_3$
alphabet which contains the list constants rdf:first and rdf:rest, and an
 $N_3$
Interpretation
$N_3$
Interpretation
 $\mathfrak{I}=(\mathfrak{D}, \mathfrak{a}, \mathfrak{p})$
. We say that
$\mathfrak{I}=(\mathfrak{D}, \mathfrak{a}, \mathfrak{p})$
. We say that
 $\mathfrak{I}$
is a model according to the simple list semantics of a formula
$\mathfrak{I}$
is a model according to the simple list semantics of a formula
 $\phi$
, written as
$\phi$
, written as
 $\mathfrak{I}\models _{sl} \phi$
iff
$\mathfrak{I}\models _{sl} \phi$
iff
 $\mathfrak{I}\models \phi$
and for triples containing rdf:first or rdf:rest in predicate position:
$\mathfrak{I}\models \phi$
and for triples containing rdf:first or rdf:rest in predicate position:
-
•
$\mathfrak{I}\models _{sl} s\ \mathtt {rdf:first}\ o.$
iff
$\mathfrak{a}(s)=(s_1 \ldots s_n)$
and
$\mathfrak{a}(o)=s_1$
-
•
$\mathfrak{I}\models _{sl} s\ \mathtt {rdf:rest}\ o.$
iff
$\mathfrak{a}(s)=(s_1 \, s_2\ldots s_n)$
and
$\mathfrak{a}(o)=( s_2\ldots s_n)$






Note that with this definition, we also fulfill the two missing axioms stated above. The syntactic list structure maps to a list structure in the domain of discourse. This domain list can only have one first element and only one rest list, and it is fully determined by these two parts.
In addition to rdf:first and rdf:rest,
 $N_3$
contains a few more special predicates which make it easier to handle lists. In our list-extension of
$N_3$
contains a few more special predicates which make it easier to handle lists. In our list-extension of
 ${N_3}{}^\exists$
we includeFootnote
17
list:last, list:in, list:member, list:append, and list:remove: list:last is used to relate a list to its last argumentFootnote
18
((:a :b :c) list:last :c.), list:member defines the relation between a list and its member ( (:a :b :c) list:member :a, :b, :c.), list:in is the inverse of list:member (:b list:in (:a :b :c).), list:append expresses that the list in object position is the combination of the two lists in subject position (((:a :b) (:c :d)) list:append (:a :b :c :d).), and by list:remove we express that the object list is the list we get by removing all occurrences of the second argument of the subject list of the first argument of the subject list (((:a :b :a :c) :a) list:remove (:b :c).).
${N_3}{}^\exists$
we includeFootnote
17
list:last, list:in, list:member, list:append, and list:remove: list:last is used to relate a list to its last argumentFootnote
18
((:a :b :c) list:last :c.), list:member defines the relation between a list and its member ( (:a :b :c) list:member :a, :b, :c.), list:in is the inverse of list:member (:b list:in (:a :b :c).), list:append expresses that the list in object position is the combination of the two lists in subject position (((:a :b) (:c :d)) list:append (:a :b :c :d).), and by list:remove we express that the object list is the list we get by removing all occurrences of the second argument of the subject list of the first argument of the subject list (((:a :b :a :c) :a) list:remove (:b :c).).
Note, that
 $N_3$
built-ins are not defined as functions but as relations. As a consequence of that, they can be used in different ways. We illustrate this on the predicate list:append. If we write the following rule
$N_3$
built-ins are not defined as functions but as relations. As a consequence of that, they can be used in different ways. We illustrate this on the predicate list:append. If we write the following rule
 \begin{equation} \mathtt {\{((:a\;\;:b)\;(:c\;\;:d))\;list:append\;?x\}= \gt \{:result\;\;:is\;?x\}.} \end{equation}
\begin{equation} \mathtt {\{((:a\;\;:b)\;(:c\;\;:d))\;list:append\;?x\}= \gt \{:result\;\;:is\;?x\}.} \end{equation}
a reasoner will retrieve
 \begin{equation} \mathtt {:result\;\;:is\;(:a\;\;:b\;\;:c\;\;:d).} \end{equation}
\begin{equation} \mathtt {:result\;\;:is\;(:a\;\;:b\;\;:c\;\;:d).} \end{equation}
But we can also write a rule like
 \begin{equation} \mathtt {\{(?x\;?y)\;list:append\;(:a\;\;:b\;\;:c)\}= \gt \{?x\;\;:and\;?y\}.} \end{equation}
\begin{equation} \mathtt {\{(?x\;?y)\;list:append\;(:a\;\;:b\;\;:c)\}= \gt \{?x\;\;:and\;?y\}.} \end{equation}
which yields
 \begin{align*} & \mathtt {()\;\;:and (:a\;\;:b\;\;:c).}\\ & \mathtt {(:a)\;\;:and (:b\;\;:c).}\\ & \mathtt {(:a\;\;:b)\;\;:and (\;\;:c).}\\ & \mathtt {(:a\;\;:b\;\;:c)\;\;:and\;\;().} \end{align*}
\begin{align*} & \mathtt {()\;\;:and (:a\;\;:b\;\;:c).}\\ & \mathtt {(:a)\;\;:and (:b\;\;:c).}\\ & \mathtt {(:a\;\;:b)\;\;:and (\;\;:c).}\\ & \mathtt {(:a\;\;:b\;\;:c)\;\;:and\;\;().} \end{align*}
Additionally, it is possible that only one of the two variables in the subject list is instantiated, with
 \begin{equation} \mathtt {\{((:a\;\;:b)\;\;?y)\;\;list:append\;\;(:a\;\;:b\;\;:c)\}= \gt \{:we\;\;:get\;\;?y\}.} \end{equation}
\begin{equation} \mathtt {\{((:a\;\;:b)\;\;?y)\;\;list:append\;\;(:a\;\;:b\;\;:c)\}= \gt \{:we\;\;:get\;\;?y\}.} \end{equation}
for example, we get
 \begin{equation} \mathtt {:we\;\;:get\;\;(:c).} \end{equation}
\begin{equation} \mathtt {:we\;\;:get\;\;(:c).} \end{equation}
On a practical level, however, this understanding of built-ins as relations comes with some limitations. If the presence of a built-in predicate causes a rule to produce infinitely many results, like it is the case with
 \begin{equation} \mathtt {\{?x\;\;list:last\;\;:c\}= \gt \{:we\;\;:get\;\;?x\}.} \end{equation}
\begin{equation} \mathtt {\{?x\;\;list:last\;\;:c\}= \gt \{:we\;\;:get\;\;?x\}.} \end{equation}
where all possible lists having :c as last element need to be produced, reasoning engines normally ignore the rule.Footnote 19 We will define the full meaning of built-in predicates in our semantics, but our translation to existential rules provided in the next section will only focus on built-in predicates producing a limited number of solutions.
We now come to the semantics of list predicates. Given an
 $N_3$
alphabet which contains the list constants rdf:first, rdf:rest, list:in, list:member, list:append, list:last and list:remove, and an
$N_3$
alphabet which contains the list constants rdf:first, rdf:rest, list:in, list:member, list:append, list:last and list:remove, and an
 $N_3$
Interpretation
$N_3$
Interpretation
 $\mathfrak{I}=(\mathfrak{D}, \mathfrak{a}, \mathfrak{p})$
. We say that
$\mathfrak{I}=(\mathfrak{D}, \mathfrak{a}, \mathfrak{p})$
. We say that
 $\mathfrak{I}$
is a model according to list semantics of a formula
$\mathfrak{I}$
is a model according to list semantics of a formula
 $\phi$
, written as
$\phi$
, written as
 $\mathfrak{I}\models _l \phi$
iff
$\mathfrak{I}\models _l \phi$
iff
 $\mathfrak{I}\models _{sl}\phi$
and the following conditions hold:
$\mathfrak{I}\models _{sl}\phi$
and the following conditions hold:
-
•
$\mathfrak{I}\models _l s\ \mathtt {list:in}\ o.$
iff
$\mathfrak{a}(o)=(o_1 \ldots o_n)$
and
$\mathfrak{a}(s)= o_i$
for some
$i$
with
$1 \leq i \leq n$
, -
•
$\mathfrak{I}\models _l s\ \mathtt {list:member}\ o.$
if
$\mathfrak{a}(s)=(s_1 \ldots s_n)$
and
$\mathfrak{a}(o)= s_i$
for some
$i$
with
$1 \leq i \leq n$
, -
•
$\mathfrak{I}\models _l s\ \mathtt {list:append}\ o.$
iff
$\mathfrak{a}(s)=((a_1 \ldots a_n)(b_1 \ldots b_m))$
,
$0\leq n$
,
$0\leq m$
, and
$\mathfrak{a} (o)=(a_1 \ldots a_n \, b_1 \ldots b_m)$
, -
•
$\mathfrak{I}\models _l s\ \mathtt {list:last}\ o$
iff
$\mathfrak{a}(s)=(s_1 \ldots s_n)$
and
$\mathfrak{a}(o)=s_n$
, -
•
$\mathfrak{I}\models _l s\ \mathtt {list:remove}\ o$
iff
$\mathfrak{a}(s)=((a_1 \ldots a_n)\, b)$
and
$\mathfrak{a} (o)=(a_i)_{a_i\neq b}$





















In the next section we discuss how lists and list predicates can be modeled with existential rules.
5.2 Implementing N3 lists in exitential rules
We model lists alongside the RDF representation of the previous subsection, sticking to the criteria imposed by N3, predominantly uniqueness of lists and functionality. For readability purposes we subsequently diverge from using our triple predicate
 $\textit {tr}$
for predicates concerning lists. Instead of
$\textit {tr}$
for predicates concerning lists. Instead of
 ${\textit {tr}}(x, \mathtt {rdf:first}, y)$
we use an auxiliary binary predicate
${\textit {tr}}(x, \mathtt {rdf:first}, y)$
we use an auxiliary binary predicate
 $\textit {first}$
and write
$\textit {first}$
and write
 $\textit {first}(x,y)$
. Similarly we use
$\textit {first}(x,y)$
. Similarly we use
 $\textit {rest}(x,y)$
to denote
$\textit {rest}(x,y)$
to denote
 ${\textit {tr}}(x,\mathtt {rdf:rest}, y)$
. For technical reasons, we use a unary predicate
${\textit {tr}}(x,\mathtt {rdf:rest}, y)$
. For technical reasons, we use a unary predicate
 $\textit {list}$
to identify all those objects that are lists. Before modeling lists and their functions, let us formulate the criteria based on the three predicates: A model
$\textit {list}$
to identify all those objects that are lists. Before modeling lists and their functions, let us formulate the criteria based on the three predicates: A model
 ${\mathcal{I}}[M]$
of rule set
${\mathcal{I}}[M]$
of rule set
 $\Sigma$
and database
$\Sigma$
and database
 ${\mathcal{D}}$
satisfies
${\mathcal{D}}$
satisfies
Uniqueness of Lists if for all lists
 $l_1$
and
$l_1$
and
 $l_2$
(i.e.,
$l_2$
(i.e.,
 $\textit {list}(l_1), \textit {list}(l_2) \in {\mathcal{I}}[M]$
),
$\textit {list}(l_1), \textit {list}(l_2) \in {\mathcal{I}}[M]$
),
 $\textit {first}(l_1, x), \textit {first}(l_2, x)\in {\mathcal{I}}[M]$
and
$\textit {first}(l_1, x), \textit {first}(l_2, x)\in {\mathcal{I}}[M]$
and
 $\textit {rest}(l_1, r), \textit {rest}(l_2, r) \in {\mathcal{I}}[M]$
implies
$\textit {rest}(l_1, r), \textit {rest}(l_2, r) \in {\mathcal{I}}[M]$
implies
 $l_1 = l_2$
;
$l_1 = l_2$
;
Functionality if for all lists
 $l$
(i.e.,
$l$
(i.e.,
 $\textit {list}(l) \in {\mathcal{I}}[M]$
),
$\textit {list}(l) \in {\mathcal{I}}[M]$
),
 $\textit {first}(l, x), \textit {first}(l, y) \in {\mathcal{I}}[M]$
implies
$\textit {first}(l, x), \textit {first}(l, y) \in {\mathcal{I}}[M]$
implies
 $x=y$
, and
$x=y$
, and
 $\textit {rest}(l, x), \textit {rest}(l, y)\in {\mathcal{I}}[M]$
implies
$\textit {rest}(l, x), \textit {rest}(l, y)\in {\mathcal{I}}[M]$
implies
 $x=y$
.
$x=y$
.
Towards Existence of Lists, we ensure existence of the empty list:
 \begin{eqnarray} & \rightarrow & \textit {list}(\mathtt {rdf:nil}) \end{eqnarray}
\begin{eqnarray} & \rightarrow & \textit {list}(\mathtt {rdf:nil}) \end{eqnarray}
Given that many rule reasoners operate via materialization of derived facts, we should not fully implement the Existence of Lists criterion since materializing all lists certainly entails an infinite process. Instead, we create lists on-demand. The binary getList predicate expects a list element
 $x$
(to be added) and a list
$x$
(to be added) and a list
 $l$
, and creates a new list with first element
$l$
, and creates a new list with first element
 $x$
and rest
$x$
and rest
 $l$
:
$l$
:
 \begin{eqnarray} \textit {getList}(x, l) \wedge \textit {list}(l) & \rightarrow & \exists l' .\ \textit {list}(l') \wedge \textit {first}(l', x) \wedge \textit {rest}(l', l) \end{eqnarray}
\begin{eqnarray} \textit {getList}(x, l) \wedge \textit {list}(l) & \rightarrow & \exists l' .\ \textit {list}(l') \wedge \textit {first}(l', x) \wedge \textit {rest}(l', l) \end{eqnarray}
With this interface in place, we replicate example (16) as follows:
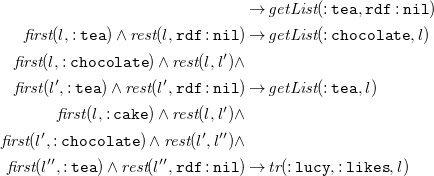 \begin{align*} & \rightarrow \textit {getList}(\mathtt {:tea}, \mathtt {rdf:nil}) \\ \textit {first}(l, \mathtt {:tea}) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow \textit {getList}(\mathtt {:chocolate}, l) \\ \textit {first}(l, \mathtt {:chocolate}) \wedge \textit {rest}(l, l') \wedge \\ \textit {first}(l', \mathtt {:tea}) \wedge \textit {rest}(l', \mathtt {rdf:nil}) & \rightarrow \textit {getList}(\mathtt {:tea}, l) \\ \textit {first}(l, \mathtt {:cake}) \wedge \textit {rest}(l, l') \wedge \\ \textit {first}(l', \mathtt {:chocolate}) \wedge \textit {rest}(l', l'') \wedge \\ \textit {first}(l'', \mathtt {:tea}) \wedge \textit {rest}(l'', \mathtt {rdf:nil})& \rightarrow {\textit {tr}}(\mathtt {:lucy}, \mathtt {:likes}, l) \end{align*}
\begin{align*} & \rightarrow \textit {getList}(\mathtt {:tea}, \mathtt {rdf:nil}) \\ \textit {first}(l, \mathtt {:tea}) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow \textit {getList}(\mathtt {:chocolate}, l) \\ \textit {first}(l, \mathtt {:chocolate}) \wedge \textit {rest}(l, l') \wedge \\ \textit {first}(l', \mathtt {:tea}) \wedge \textit {rest}(l', \mathtt {rdf:nil}) & \rightarrow \textit {getList}(\mathtt {:tea}, l) \\ \textit {first}(l, \mathtt {:cake}) \wedge \textit {rest}(l, l') \wedge \\ \textit {first}(l', \mathtt {:chocolate}) \wedge \textit {rest}(l', l'') \wedge \\ \textit {first}(l'', \mathtt {:tea}) \wedge \textit {rest}(l'', \mathtt {rdf:nil})& \rightarrow {\textit {tr}}(\mathtt {:lucy}, \mathtt {:likes}, l) \end{align*}
This rather cumbersome encoding implements Uniqueness of Lists. Towards a much simpler encoding, suppose we only take the following rule obtaining the same list as above:
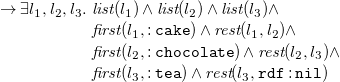 \begin{equation} \begin{array}{rcl} & \rightarrow \exists l_1, l_2, l_3 . & \textit {list}(l_1) \wedge \textit {list}(l_2) \wedge \textit {list}(l_3) \wedge \\ && \textit {first}(l_1, \mathtt {:cake}) \wedge \textit {rest}(l_1, l_2) \wedge \\ && \textit {first}(l_2, \mathtt {:chocolate}) \wedge \textit {rest}(l_2, l_3) \wedge \\ && \textit {first}(l_3, \mathtt {:tea}) \wedge \textit {rest}(l_3, \mathtt {rdf:nil}) \end{array} \end{equation}
\begin{equation} \begin{array}{rcl} & \rightarrow \exists l_1, l_2, l_3 . & \textit {list}(l_1) \wedge \textit {list}(l_2) \wedge \textit {list}(l_3) \wedge \\ && \textit {first}(l_1, \mathtt {:cake}) \wedge \textit {rest}(l_1, l_2) \wedge \\ && \textit {first}(l_2, \mathtt {:chocolate}) \wedge \textit {rest}(l_2, l_3) \wedge \\ && \textit {first}(l_3, \mathtt {:tea}) \wedge \textit {rest}(l_3, \mathtt {rdf:nil}) \end{array} \end{equation}
The rule itself can now be combined with other rules as well as the previous one. However, uniqueness can be violated when the restricted chase is used for reasoning. Recall from Subsection 4.1 that the restricted chase creates new facts (by instantiating rule heads) only if the rule matches are not yet satisfied. Suppose we create an alternative list that is the same as before but replaces :cake for :cookies:
 \begin{equation} \begin{array}{rcl} & \rightarrow \exists l_1, l_2, l_3 . & \textit {list}(l_1) \wedge \textit {list}(l_2) \wedge \textit {list}(l_3) \wedge \\ && \textit {first}(l_1, \mathtt {:cookies}) \wedge \textit {rest}(l_1, l_2) \wedge \\ && \textit {first}(l_2, \mathtt {:chocolate}) \wedge \textit {rest}(l_2, l_3) \wedge \\ && \textit {first}(l_3, \mathtt {:tea}) \wedge \textit {rest}(l_3, \mathtt {rdf:nil}) \end{array} \end{equation}
\begin{equation} \begin{array}{rcl} & \rightarrow \exists l_1, l_2, l_3 . & \textit {list}(l_1) \wedge \textit {list}(l_2) \wedge \textit {list}(l_3) \wedge \\ && \textit {first}(l_1, \mathtt {:cookies}) \wedge \textit {rest}(l_1, l_2) \wedge \\ && \textit {first}(l_2, \mathtt {:chocolate}) \wedge \textit {rest}(l_2, l_3) \wedge \\ && \textit {first}(l_3, \mathtt {:tea}) \wedge \textit {rest}(l_3, \mathtt {rdf:nil}) \end{array} \end{equation}
While the list created by rule (33) is surely distinct from the one created through rule application of (32), they also obtain different sublists. After a restricted chase over rule set {(32), (33) } and the empty database, we get two distinct lists
 $l$
and
$l$
and
 $l'$
such that
$l'$
such that
 $\textit {first}(l, \mathtt {:tea})$
,
$\textit {first}(l, \mathtt {:tea})$
,
 $\textit {first}(l', \mathtt {:tea}), \textit {rest}(l,\mathtt {rdf:nil}), \textit {rest}(l',\mathtt {rdf:nil})$
, contradicting Uniqueness of Lists. The reason for this is that the application condition of the restricted chase checks whether the head of the rule is already satisfied. If not, the full head is instantiated with (globally) fresh nulls in place of the existentially quantified variables. Our encoding via rule (31) overcomes this issue by step-wise introducing new list elements. If a sublist already exists, rule creation is not triggered redundantly.
$\textit {first}(l', \mathtt {:tea}), \textit {rest}(l,\mathtt {rdf:nil}), \textit {rest}(l',\mathtt {rdf:nil})$
, contradicting Uniqueness of Lists. The reason for this is that the application condition of the restricted chase checks whether the head of the rule is already satisfied. If not, the full head is instantiated with (globally) fresh nulls in place of the existentially quantified variables. Our encoding via rule (31) overcomes this issue by step-wise introducing new list elements. If a sublist already exists, rule creation is not triggered redundantly.
Theorem 5.1.
Let
 ${\mathcal{D}}$
be a database,
${\mathcal{D}}$
be a database,
 $\Sigma$
a rule set, and
$\Sigma$
a rule set, and
 $\mathcal{I}$
the restricted chase of
$\mathcal{I}$
the restricted chase of
 $\Sigma$
and
$\Sigma$
and
 ${\mathcal{D}}$
. If the only rules in
${\mathcal{D}}$
. If the only rules in
 $\Sigma$
using predicates list, first, or rest in their heads are those of (30) and (31), then
$\Sigma$
using predicates list, first, or rest in their heads are those of (30) and (31), then
 $\mathcal{I}$
satisfies (a)
Uniqueness of Lists
and (b)
Functionality
.
$\mathcal{I}$
satisfies (a)
Uniqueness of Lists
and (b)
Functionality
.
Proof. Functionality follows from the fact that the only rule introducing first- and rest-atoms is (31) and, thereby, uniquely determines first and rest elements for a list term. Thus, predicates first and rest are functional.
Regarding Uniqueness of Lists, we observe that only rule (31) introduces lists together with their (functional) first and rest atoms. Hence, if there were two lists
 $l_1$
and
$l_1$
and
 $l_2$
with the same first and rest elements, then the respective chase sequence
$l_2$
with the same first and rest elements, then the respective chase sequence
 ${\mathcal{D}}^0 {\mathcal{D}}^1 {\mathcal{D}}^2 \ldots$
contains a member
${\mathcal{D}}^0 {\mathcal{D}}^1 {\mathcal{D}}^2 \ldots$
contains a member
 $\mathcal{D}^i$
in which (without loss of generality)
$\mathcal{D}^i$
in which (without loss of generality)
 $l_1$
is contained. Furthermore, there is a later instance
$l_1$
is contained. Furthermore, there is a later instance
 ${\mathcal{D}}^j$
(
${\mathcal{D}}^j$
(
 $j \gt i$
) in which
$j \gt i$
) in which
 $l_2$
is not yet contained but is about to be added to
$l_2$
is not yet contained but is about to be added to
 ${\mathcal{D}}^{j+1}$
. But rule (31) is already satisfied in
${\mathcal{D}}^{j+1}$
. But rule (31) is already satisfied in
 ${\mathcal{D}}^j$
for the respective first/rest elements. Thus,
${\mathcal{D}}^j$
for the respective first/rest elements. Thus,
 $l_2$
will never be instantiated by the restricted chase and can, thus, not be part of the chase.
$l_2$
will never be instantiated by the restricted chase and can, thus, not be part of the chase.
Before we get into the intricates of appending two or more lists, let us briefly show the rules for implementing list:last and list:in (and list:member as the inverse of list:in), represented by binary predicate symbols last and isIn.
 \begin{eqnarray} \textit {first}(l, x) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {last}(x, l) \end{eqnarray}
\begin{eqnarray} \textit {first}(l, x) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {last}(x, l) \end{eqnarray}
 \begin{eqnarray} \textit {rest}(l, l') \wedge \textit {last}(y, l') & \rightarrow & \textit {last}(y, l) \end{eqnarray}
\begin{eqnarray} \textit {rest}(l, l') \wedge \textit {last}(y, l') & \rightarrow & \textit {last}(y, l) \end{eqnarray}
 \begin{eqnarray} \textit {first}(l, x) & \rightarrow & \textit {isIn}(l, x) \end{eqnarray}
\begin{eqnarray} \textit {first}(l, x) & \rightarrow & \textit {isIn}(l, x) \end{eqnarray}
 \begin{eqnarray} \textit {rest}(l, l') \wedge \textit {isIn}(l', y) & \rightarrow & \textit {isIn}(l, y) \end{eqnarray}
\begin{eqnarray} \textit {rest}(l, l') \wedge \textit {isIn}(l', y) & \rightarrow & \textit {isIn}(l, y) \end{eqnarray}
Note, these rules are sufficient for creating all necessary facts to obtain the required results. Regarding list concatenation via list:append, we introduce the ternary predicate append with the appended list in the first position and the two constituent lists in second and last. First, every list
 $l$
prepended by the empty list yields itself:
$l$
prepended by the empty list yields itself:
 \begin{eqnarray} \textit {list}(l) \rightarrow \textit {append}(l, \mathtt {rdf:nil}, l) \end{eqnarray}
\begin{eqnarray} \textit {list}(l) \rightarrow \textit {append}(l, \mathtt {rdf:nil}, l) \end{eqnarray}
Second, if we append lists
 $l_1$
and
$l_1$
and
 $l_2$
to get
$l_2$
to get
 $l_3$
(i.e.,
$l_3$
(i.e.,
 $\textit {append}(l_3, l_1, l_2)$
), and
$\textit {append}(l_3, l_1, l_2)$
), and
 $x$
is the first element of
$x$
is the first element of
 $l_2$
, then
$l_2$
, then
 $l_3$
can also be obtained by appending
$l_3$
can also be obtained by appending
 $x$
to
$x$
to
 $l_1$
, and the result to the rest of
$l_1$
, and the result to the rest of
 $l_2$
. Therefore, we need an auxiliary set of rules that appends a single element
$l_2$
. Therefore, we need an auxiliary set of rules that appends a single element
 $x$
to a list
$x$
to a list
 $l$
:
$l$
:
 \begin{eqnarray} \textit {append}(l_3, l_1, l_2) \wedge \textit {first}(l_2, x) & \rightarrow & \textit {getAppendS}(l_1, x) \end{eqnarray}
\begin{eqnarray} \textit {append}(l_3, l_1, l_2) \wedge \textit {first}(l_2, x) & \rightarrow & \textit {getAppendS}(l_1, x) \end{eqnarray}
 \begin{eqnarray} \textit {getAppendS}(l, x) \wedge \textit {rest}(l, l') & \rightarrow & \textit {getAppendS}(l', x) \end{eqnarray}
\begin{eqnarray} \textit {getAppendS}(l, x) \wedge \textit {rest}(l, l') & \rightarrow & \textit {getAppendS}(l', x) \end{eqnarray}
Rule (39) requests a new list that starts with the same elements as
 $l_1$
and appends the additional element
$l_1$
and appends the additional element
 $x$
. Rule (40) recursively pushes the request through the list. Once, the empty list (rdf:nil) is reached, appending the element
$x$
. Rule (40) recursively pushes the request through the list. Once, the empty list (rdf:nil) is reached, appending the element
 $x$
is the same as prepending it to rdf:nil:
$x$
is the same as prepending it to rdf:nil:
 \begin{equation} \begin{array}{rcl} \textit {getAppendS}(\mathtt {rdf:nil}, x) & \rightarrow & \textit {getList}(x, \mathtt {rdf:nil}) \\ \textit {getAppendS}(\mathtt {rdf:nil}, x) \wedge \textit {list}(l) \wedge \\ \textit {first}(l, x) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {appendS}(l, \mathtt {rdf:nil}, x) \\ \end{array} \end{equation}
\begin{equation} \begin{array}{rcl} \textit {getAppendS}(\mathtt {rdf:nil}, x) & \rightarrow & \textit {getList}(x, \mathtt {rdf:nil}) \\ \textit {getAppendS}(\mathtt {rdf:nil}, x) \wedge \textit {list}(l) \wedge \\ \textit {first}(l, x) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {appendS}(l, \mathtt {rdf:nil}, x) \\ \end{array} \end{equation}
These rules create a fresh list with first element
 $x$
and rest rdf:nil if necessary. Predicate appendS stands for append singleton and, therefore,
$x$
and rest rdf:nil if necessary. Predicate appendS stands for append singleton and, therefore,
 $\textit {appendS}(l, l', x)$
tells that list
$\textit {appendS}(l, l', x)$
tells that list
 $l$
is the result of appending
$l$
is the result of appending
 $x$
to list
$x$
to list
 $l'$
. The recursive step is implemented as follows:
$l'$
. The recursive step is implemented as follows:
 \begin{equation} \begin{array}{rcl} \textit {getAppendS}(l, x) \wedge \textit {first}(l, y) \wedge \textit {rest}(l, l') \wedge \textit {appendS}(l'', l', x) & \rightarrow & \textit {getList}(y, l'') \\ \textit {getAppendS}(l, x) \wedge \textit {first}(l, y) \wedge \textit {rest}(l, l') \wedge \\ \textit {appendS}(l'', l', x) \wedge \textit {list}(l_{\nu }) \wedge \textit {first}(l_{\nu }, y) \wedge \textit {rest}(l_{\nu }, l'') & \rightarrow & \textit {appendS}(l_{\nu }, l, x) \end{array} \end{equation}
\begin{equation} \begin{array}{rcl} \textit {getAppendS}(l, x) \wedge \textit {first}(l, y) \wedge \textit {rest}(l, l') \wedge \textit {appendS}(l'', l', x) & \rightarrow & \textit {getList}(y, l'') \\ \textit {getAppendS}(l, x) \wedge \textit {first}(l, y) \wedge \textit {rest}(l, l') \wedge \\ \textit {appendS}(l'', l', x) \wedge \textit {list}(l_{\nu }) \wedge \textit {first}(l_{\nu }, y) \wedge \textit {rest}(l_{\nu }, l'') & \rightarrow & \textit {appendS}(l_{\nu }, l, x) \end{array} \end{equation}
So if a list
 $l$
shall be appended by singleton
$l$
shall be appended by singleton
 $x$
and we already know that for the rest of
$x$
and we already know that for the rest of
 $l$
(i.e.,
$l$
(i.e.,
 $l'$
) there is a version with appended
$l'$
) there is a version with appended
 $x$
(i.e.,
$x$
(i.e.,
 $l''$
), then
$l''$
), then
 $l$
appended by
$l$
appended by
 $x$
is the new list formed by the first element of
$x$
is the new list formed by the first element of
 $l$
(i.e.,
$l$
(i.e.,
 $y$
) and
$y$
) and
 $l''$
as rest.
$l''$
as rest.
Last, appending two lists can also be requested via rules. Once more, we use a predicate for this request, namely getAppend. This predicate is an interface for users (i.e., other rules) to create lists beyond predicate getList. Such requests are served by the following rules:
 \begin{eqnarray*} \textit {getAppend}(\mathtt {rdf:nil}, l_2) & \rightarrow & \textit {append}(l_2, \mathtt {rdf:nil}, l_2) \\ \textit {getAppend}(l_1, l_2) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, l_1') & \rightarrow & \textit {getAppend}(l_1', l_2) \\ \textit {getAppend}(l_1, l_2) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, l_1') \wedge \\ \wedge \textit {append}(l_3,l_1', l_2) & \rightarrow & \textit {getList}(x, l_3) \\ \textit {getAppend}(l_1, l_2) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, l_1') \wedge \\ \textit {append}(l_3,l_1', l_2) \wedge \textit {first}(l_3', x) \wedge \textit {rest}(l_3', l_3) & \rightarrow & \textit {append}(l_3', l_1, l_2) \end{eqnarray*}
\begin{eqnarray*} \textit {getAppend}(\mathtt {rdf:nil}, l_2) & \rightarrow & \textit {append}(l_2, \mathtt {rdf:nil}, l_2) \\ \textit {getAppend}(l_1, l_2) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, l_1') & \rightarrow & \textit {getAppend}(l_1', l_2) \\ \textit {getAppend}(l_1, l_2) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, l_1') \wedge \\ \wedge \textit {append}(l_3,l_1', l_2) & \rightarrow & \textit {getList}(x, l_3) \\ \textit {getAppend}(l_1, l_2) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, l_1') \wedge \\ \textit {append}(l_3,l_1', l_2) \wedge \textit {first}(l_3', x) \wedge \textit {rest}(l_3', l_3) & \rightarrow & \textit {append}(l_3', l_1, l_2) \end{eqnarray*}
The remove functionality can be implemented in a similar fashion. Note that none of the additionally instantiated rules for list built-ins use predicates list, first, or rest in their heads. Thus, Theorem5.1 still holds in rule sets using built-in functions. Throughout the rest of this subsection we aim at showing how the framework implements the examples given throughout Subsection 5.1 as well as an example of list usage inside
 $N_3$
rules.
$N_3$
rules.
5.2.1 Appending lists
First, recall the following
 $N_3$
rule (cf. (24)):
$N_3$
rule (cf. (24)):
 \begin{equation*} \mathtt {\{((:a\;\;:b) (:c\;\;:d)) list:append ?x\}= \gt \{:result\;\;:is\;\;?x\}.} \end{equation*}
\begin{equation*} \mathtt {\{((:a\;\;:b) (:c\;\;:d)) list:append ?x\}= \gt \{:result\;\;:is\;\;?x\}.} \end{equation*}
For the implementation of this rule, we need to make sure the constant lists (the operands of list:append) exist:
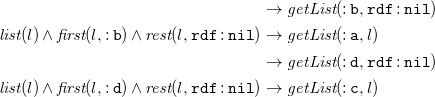 \begin{eqnarray*} & \rightarrow & \textit {getList}(\mathtt {:b}, \mathtt {rdf:nil}) \\ \textit {list}(l) \wedge \textit {first}(l, \mathtt {:b}) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {getList}(\mathtt {:a}, l) \\ & \rightarrow & \textit {getList}(\mathtt {:d}, \mathtt {rdf:nil}) \\ \textit {list}(l) \wedge \textit {first}(l, \mathtt {:d}) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {getList}(\mathtt {:c}, l) \end{eqnarray*}
\begin{eqnarray*} & \rightarrow & \textit {getList}(\mathtt {:b}, \mathtt {rdf:nil}) \\ \textit {list}(l) \wedge \textit {first}(l, \mathtt {:b}) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {getList}(\mathtt {:a}, l) \\ & \rightarrow & \textit {getList}(\mathtt {:d}, \mathtt {rdf:nil}) \\ \textit {list}(l) \wedge \textit {first}(l, \mathtt {:d}) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {getList}(\mathtt {:c}, l) \end{eqnarray*}
After these rules have been used, the lists in example (24) are guaranteed to exist. Next, we can request to append the two lists matched within the rule:
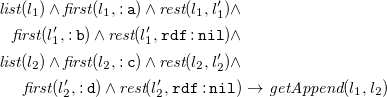 \begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, \mathtt {:a}) \wedge \textit {rest}(l_1, l_1') \wedge && \\ \textit {first}(l_1', \mathtt {:b}) \wedge \textit {rest}(l_1', \mathtt {rdf:nil}) \wedge && \\ \textit {list}(l_2) \wedge \textit {first}(l_2, \mathtt {:c}) \wedge \textit {rest}(l_2, l_2') \wedge && \\ \textit {first}(l_2',\mathtt {:d}) \wedge \textit {rest}(l_2', \mathtt {rdf:nil}) & \rightarrow & \textit {getAppend}(l_1, l_2) \end{eqnarray*}
\begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, \mathtt {:a}) \wedge \textit {rest}(l_1, l_1') \wedge && \\ \textit {first}(l_1', \mathtt {:b}) \wedge \textit {rest}(l_1', \mathtt {rdf:nil}) \wedge && \\ \textit {list}(l_2) \wedge \textit {first}(l_2, \mathtt {:c}) \wedge \textit {rest}(l_2, l_2') \wedge && \\ \textit {first}(l_2',\mathtt {:d}) \wedge \textit {rest}(l_2', \mathtt {rdf:nil}) & \rightarrow & \textit {getAppend}(l_1, l_2) \end{eqnarray*}
After this rule we are guaranteed to have all lists in place for implementing our rule.
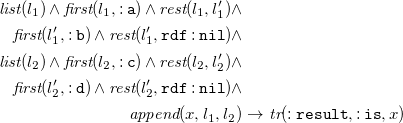 \begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, \mathtt {:a}) \wedge \textit {rest}(l_1, l_1') \wedge && \\ \textit {first}(l_1', \mathtt {:b}) \wedge \textit {rest}(l_1', \mathtt {rdf:nil}) \wedge && \\ \textit {list}(l_2) \wedge \textit {first}(l_2, \mathtt {:c}) \wedge \textit {rest}(l_2, l_2') \wedge && \\ \textit {first}(l_2',\mathtt {:d}) \wedge \textit {rest}(l_2', \mathtt {rdf:nil}) \wedge && \\ \textit {append}(x, l_1, l_2) & \rightarrow & {\textit {tr}}(\mathtt {:result}, \mathtt {:is}, x) \end{eqnarray*}
\begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, \mathtt {:a}) \wedge \textit {rest}(l_1, l_1') \wedge && \\ \textit {first}(l_1', \mathtt {:b}) \wedge \textit {rest}(l_1', \mathtt {rdf:nil}) \wedge && \\ \textit {list}(l_2) \wedge \textit {first}(l_2, \mathtt {:c}) \wedge \textit {rest}(l_2, l_2') \wedge && \\ \textit {first}(l_2',\mathtt {:d}) \wedge \textit {rest}(l_2', \mathtt {rdf:nil}) \wedge && \\ \textit {append}(x, l_1, l_2) & \rightarrow & {\textit {tr}}(\mathtt {:result}, \mathtt {:is}, x) \end{eqnarray*}
Second, we reconsider rule (26):
 \begin{equation*} \mathtt {\{(?x\;\;?y) list:append (:a\;\;:b\;\;:c)\}= \gt \{?x\;\;:and\;\;?y\}.} \end{equation*}
\begin{equation*} \mathtt {\{(?x\;\;?y) list:append (:a\;\;:b\;\;:c)\}= \gt \{?x\;\;:and\;\;?y\}.} \end{equation*}
In this example we need to ensure the resulting list exists. Our rule framework (especially rules (38)–(42)) takes care of disecting the list into its fragment. Thus, the example rule can be implemented, once the list (:a :b :c) has been created as before, by
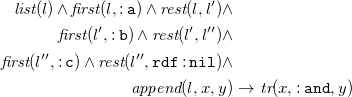 \begin{eqnarray*} \textit {list}(l) \wedge \textit {first}(l, \mathtt {:a}) \wedge \textit {rest}(l, l') \wedge && \\ \textit {first}(l', \mathtt {:b}) \wedge \textit {rest}(l', l'') \wedge && \\ \textit {first}(l'', \mathtt {:c}) \wedge \textit {rest}(l'', \mathtt {rdf:nil}) \wedge && \\ \textit {append}(l, x, y) & \rightarrow & {\textit {tr}}(x, \mathtt {:and}, y) \end{eqnarray*}
\begin{eqnarray*} \textit {list}(l) \wedge \textit {first}(l, \mathtt {:a}) \wedge \textit {rest}(l, l') \wedge && \\ \textit {first}(l', \mathtt {:b}) \wedge \textit {rest}(l', l'') \wedge && \\ \textit {first}(l'', \mathtt {:c}) \wedge \textit {rest}(l'', \mathtt {rdf:nil}) \wedge && \\ \textit {append}(l, x, y) & \rightarrow & {\textit {tr}}(x, \mathtt {:and}, y) \end{eqnarray*}
5.2.2 List creation in rules
Last, we consider an
 $N_3$
rule that identifies two lists in its body and creates a new list based on some elements identified within the list. The following rule identifies two lists, one with three elements (?x, ?y, and ?z) and one with two elements (?a and ?b), and then creates a new list with first element ?y and a rest list with the singleton element ?b:
$N_3$
rule that identifies two lists in its body and creates a new list based on some elements identified within the list. The following rule identifies two lists, one with three elements (?x, ?y, and ?z) and one with two elements (?a and ?b), and then creates a new list with first element ?y and a rest list with the singleton element ?b:
 \begin{equation} \mathtt {\{:s\;\;:p\;\;(?x\;\;?y\;\;?z).\;\;:k\;\;:l\;\;(?a\;\;?b)\}= \gt \{:h\;\;:i\;\;(?y\;\;?b)\}.} \end{equation}
\begin{equation} \mathtt {\{:s\;\;:p\;\;(?x\;\;?y\;\;?z).\;\;:k\;\;:l\;\;(?a\;\;?b)\}= \gt \{:h\;\;:i\;\;(?y\;\;?b)\}.} \end{equation}
This rule needs splitting into creating the list for the result and then creating the output triple:
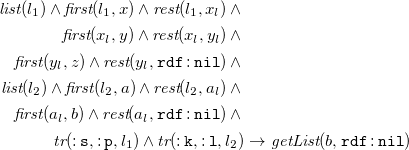 \begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, x_l) \wedge \\ \textit {first}(x_l, y) \wedge \textit {rest}(x_l, y_l) \wedge \\ \textit {first}(y_l, z) \wedge \textit {rest}(y_l, \mathtt {rdf:nil}) \wedge \\ \textit {list}(l_2) \wedge \textit {first}(l_2, a) \wedge \textit {rest}(l_2, a_l) \wedge \\ \textit {first}(a_l, b) \wedge \textit {rest}(a_l, \mathtt {rdf:nil}) \wedge \\ {\textit {tr}}(\mathtt {:s}, \mathtt {:p}, l_1) \wedge {\textit {tr}}(\mathtt {:k}, \mathtt {:l}, l_2) & \rightarrow & \textit {getList}(b, \mathtt {rdf:nil}) \\ \end{eqnarray*}
\begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, x_l) \wedge \\ \textit {first}(x_l, y) \wedge \textit {rest}(x_l, y_l) \wedge \\ \textit {first}(y_l, z) \wedge \textit {rest}(y_l, \mathtt {rdf:nil}) \wedge \\ \textit {list}(l_2) \wedge \textit {first}(l_2, a) \wedge \textit {rest}(l_2, a_l) \wedge \\ \textit {first}(a_l, b) \wedge \textit {rest}(a_l, \mathtt {rdf:nil}) \wedge \\ {\textit {tr}}(\mathtt {:s}, \mathtt {:p}, l_1) \wedge {\textit {tr}}(\mathtt {:k}, \mathtt {:l}, l_2) & \rightarrow & \textit {getList}(b, \mathtt {rdf:nil}) \\ \end{eqnarray*}
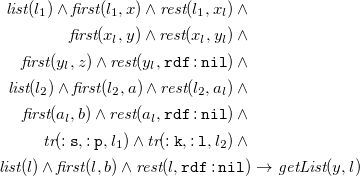 \begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, x_l) \wedge \\ \textit {first}(x_l, y) \wedge \textit {rest}(x_l, y_l) \wedge \\ \textit {first}(y_l, z) \wedge \textit {rest}(y_l, \mathtt {rdf:nil}) \wedge \\ \textit {list}(l_2) \wedge \textit {first}(l_2, a) \wedge \textit {rest}(l_2, a_l) \wedge \\ \textit {first}(a_l, b) \wedge \textit {rest}(a_l, \mathtt {rdf:nil}) \wedge \\ {\textit {tr}}(\mathtt {:s}, \mathtt {:p}, l_1) \wedge {\textit {tr}}(\mathtt {:k}, \mathtt {:l}, l_2) \wedge \\ \textit {list}(l) \wedge \textit {first}(l, b) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {getList}(y, l) \\ \end{eqnarray*}
\begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, x_l) \wedge \\ \textit {first}(x_l, y) \wedge \textit {rest}(x_l, y_l) \wedge \\ \textit {first}(y_l, z) \wedge \textit {rest}(y_l, \mathtt {rdf:nil}) \wedge \\ \textit {list}(l_2) \wedge \textit {first}(l_2, a) \wedge \textit {rest}(l_2, a_l) \wedge \\ \textit {first}(a_l, b) \wedge \textit {rest}(a_l, \mathtt {rdf:nil}) \wedge \\ {\textit {tr}}(\mathtt {:s}, \mathtt {:p}, l_1) \wedge {\textit {tr}}(\mathtt {:k}, \mathtt {:l}, l_2) \wedge \\ \textit {list}(l) \wedge \textit {first}(l, b) \wedge \textit {rest}(l, \mathtt {rdf:nil}) & \rightarrow & \textit {getList}(y, l) \\ \end{eqnarray*}
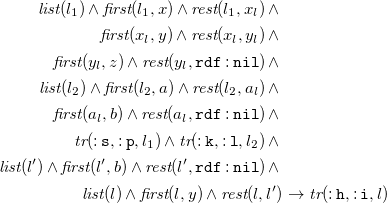 \begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, x_l) \wedge \\ \textit {first}(x_l, y) \wedge \textit {rest}(x_l, y_l) \wedge \\ \textit {first}(y_l, z) \wedge \textit {rest}(y_l, \mathtt {rdf:nil}) \wedge \\ \textit {list}(l_2) \wedge \textit {first}(l_2, a) \wedge \textit {rest}(l_2, a_l) \wedge \\ \textit {first}(a_l, b) \wedge \textit {rest}(a_l, \mathtt {rdf:nil}) \wedge \\ {\textit {tr}}(\mathtt {:s}, \mathtt {:p}, l_1) \wedge {\textit {tr}}(\mathtt {:k}, \mathtt {:l}, l_2) \wedge \\ \textit {list}(l') \wedge \textit {first}(l', b) \wedge \textit {rest}(l', \mathtt {rdf:nil}) \wedge \\ \textit {list}(l) \wedge \textit {first}(l, y) \wedge \textit {rest}(l, l') & \rightarrow & {\textit {tr}}(\mathtt {:h}, \mathtt {:i}, l) \end{eqnarray*}
\begin{eqnarray*} \textit {list}(l_1) \wedge \textit {first}(l_1, x) \wedge \textit {rest}(l_1, x_l) \wedge \\ \textit {first}(x_l, y) \wedge \textit {rest}(x_l, y_l) \wedge \\ \textit {first}(y_l, z) \wedge \textit {rest}(y_l, \mathtt {rdf:nil}) \wedge \\ \textit {list}(l_2) \wedge \textit {first}(l_2, a) \wedge \textit {rest}(l_2, a_l) \wedge \\ \textit {first}(a_l, b) \wedge \textit {rest}(a_l, \mathtt {rdf:nil}) \wedge \\ {\textit {tr}}(\mathtt {:s}, \mathtt {:p}, l_1) \wedge {\textit {tr}}(\mathtt {:k}, \mathtt {:l}, l_2) \wedge \\ \textit {list}(l') \wedge \textit {first}(l', b) \wedge \textit {rest}(l', \mathtt {rdf:nil}) \wedge \\ \textit {list}(l) \wedge \textit {first}(l, y) \wedge \textit {rest}(l, l') & \rightarrow & {\textit {tr}}(\mathtt {:h}, \mathtt {:i}, l) \end{eqnarray*}
This construction may become complicated if several list built-ins are co-dependent.
5.3
$N_3$
list predicates as syntactic sugar

As detailed in the previous section,
 $N_3$
list predicates can be expressed by means of existential rules if the reasoning is performed under similar premises as the restricted chase. This is particularly interesting in the context of Notation3 Logic: it is well-known that list predicates list:in, list:member, list:append, list:last, and list:remove introduced in Subsection 5.1 are syntactic sugar, and, therefore, can be expressed using rules in combination with the predicates rdf:first and rdf:rest. Typically these rules are only written for reasoners supporting backward-chaining, that is, with algorithms performing reasoning starting from the goal and following rules from head to body until some factual evidence is found.Footnote
20
$N_3$
list predicates can be expressed by means of existential rules if the reasoning is performed under similar premises as the restricted chase. This is particularly interesting in the context of Notation3 Logic: it is well-known that list predicates list:in, list:member, list:append, list:last, and list:remove introduced in Subsection 5.1 are syntactic sugar, and, therefore, can be expressed using rules in combination with the predicates rdf:first and rdf:rest. Typically these rules are only written for reasoners supporting backward-chaining, that is, with algorithms performing reasoning starting from the goal and following rules from head to body until some factual evidence is found.Footnote
20
For better illustration, consider the following
 $N_3$
rules implementing list:append:Footnote
21
$N_3$
rules implementing list:append:Footnote
21
 \begin{align} \mathtt {\{(()\;\;?x)\;\;list:append\;\;?x\}\lt =}& \mathtt {\{ \}. } \end{align}
\begin{align} \mathtt {\{(()\;\;?x)\;\;list:append\;\;?x\}\lt =}& \mathtt {\{ \}. } \end{align}
 \begin{align} \mathtt {\{(?x\;\;?y)\;\;list:append\;\;?z\}\lt =}& \mathtt {\{?x\;\;rdf:first\;\;?a.\;\;?x\;\;rdf:rest\;\;?r.}\\ &\mathtt { ?z\;\;rdf:first\;\;?a.\;\;?z\;\;rdf:rest\;\;?q. }\notag \\ &\mathtt { (?r\;\;?y)\;\;list:append\;\;?q\;\;\} }.\end{align}
\begin{align} \mathtt {\{(?x\;\;?y)\;\;list:append\;\;?z\}\lt =}& \mathtt {\{?x\;\;rdf:first\;\;?a.\;\;?x\;\;rdf:rest\;\;?r.}\\ &\mathtt { ?z\;\;rdf:first\;\;?a.\;\;?z\;\;rdf:rest\;\;?q. }\notag \\ &\mathtt { (?r\;\;?y)\;\;list:append\;\;?q\;\;\} }.\end{align}
If these rules are used in backward-chaining, they get triggered by each execution of a rule containing a triple with the predicate list:append. If we, for example, would like to get all instances of the triple :result :is ?x. which can be derived by rule (24), the triple in the body of the rule triggers rule (45), to test whether there is evidence for the triple ((:a :b) (:c :d)) list:append ?x. The rule is again followed in a backwards direction yielding:
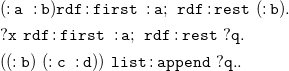 \begin{align} & \mathtt { (:a\;\;:b) rdf:first\;\;:a;\;\;rdf:rest\;\;(:b).}\\ &\mathtt { ?x\;\;rdf:first\;\;:a;\;\;rdf:rest\;\;?q. }\nonumber \\ &\mathtt { ((:b)\;\;(:c\;\;:d))\;\;list:append\;\;?q. }.\nonumber \end{align}
\begin{align} & \mathtt { (:a\;\;:b) rdf:first\;\;:a;\;\;rdf:rest\;\;(:b).}\\ &\mathtt { ?x\;\;rdf:first\;\;:a;\;\;rdf:rest\;\;?q. }\nonumber \\ &\mathtt { ((:b)\;\;(:c\;\;:d))\;\;list:append\;\;?q. }.\nonumber \end{align}
The triples in the first line of this example got instantiated according to the semantics of rdf:first and rdf:rest. This istantiation also caused the triples in the following two lines to partially instantiated. Since there is not enough information to instantiate the triples from the second line, a (backward) reasoner would continue with the last triple which again has list:append in predicate position. Rule (45) is called again. This time we retrieve:
 \begin{align} & \mathtt { (:b)\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;().}\\ &\mathtt { ?q\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;?q2. } \nonumber \\ &\mathtt { (() (:c\;\;:d)) list:append ?q2. }.\nonumber \end{align}
\begin{align} & \mathtt { (:b)\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;().}\\ &\mathtt { ?q\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;?q2. } \nonumber \\ &\mathtt { (() (:c\;\;:d)) list:append ?q2. }.\nonumber \end{align}
Again following the rules backwards, we can apply rule (44) to get a value for ?q2:
 \begin{equation*} \mathtt { (()\;\;(:c\;\;:d))\;\;list:append (:c\;\;:d). } \end{equation*}
\begin{equation*} \mathtt { (()\;\;(:c\;\;:d))\;\;list:append (:c\;\;:d). } \end{equation*}
With this information, we get a binding for ?q in (47):
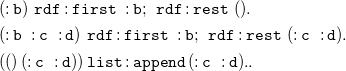 \begin{align*} & \mathtt { (:b)\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;().}\\ &\mathtt { (:b\;\;:c\;\;:d)\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;(:c\;\;:d). } \\ & \mathtt { (()\;(:c\;\;:d))\;list:append\;(:c\;\;:d). }. \end{align*}
\begin{align*} & \mathtt { (:b)\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;().}\\ &\mathtt { (:b\;\;:c\;\;:d)\;\;rdf:first\;\;:b;\;\;rdf:rest\;\;(:c\;\;:d). } \\ & \mathtt { (()\;(:c\;\;:d))\;list:append\;(:c\;\;:d). }. \end{align*}
Subsequently, we obtain a new binding ?x in (46):
 \begin{align*} & \mathtt { (:a\;\;:b)\;\;rdf:first\;\;:a;\;\;rdf:rest\;\;(:b).}\\ &\mathtt { (:a\;\;:b\;\;:c\;\;:d)\;\;rdf:first\;\;:a;\;\;rdf:rest\;\;(:b\;\;:c\;\;:d ). } \\ &\mathtt { ((:b)\;\;(:c\;\;:d))\;\;list:append\;\;(:b\;\;:c\;\;:d). }. \end{align*}
\begin{align*} & \mathtt { (:a\;\;:b)\;\;rdf:first\;\;:a;\;\;rdf:rest\;\;(:b).}\\ &\mathtt { (:a\;\;:b\;\;:c\;\;:d)\;\;rdf:first\;\;:a;\;\;rdf:rest\;\;(:b\;\;:c\;\;:d ). } \\ &\mathtt { ((:b)\;\;(:c\;\;:d))\;\;list:append\;\;(:b\;\;:c\;\;:d). }. \end{align*}
This produces :we :get (:a :b :c :d). as a solution. The backward-chaining process produces triples on-demand: only if a rule premise depends on the information, a backward rule is called to retrieve it, and this allows us to have infinitely large models which we do not materialize during reasoning.
In the
 $N_3$
community, this and other examples are normally used to argue that
$N_3$
community, this and other examples are normally used to argue that
 $N_3$
reasoners should support backwards-reasoning as a way to only produce triples when these are needed to find instances for a goal. Following the findings of the previous subsection, it is not true that we necessarily need backward rules to support triple production on-demand. Instead of writing rule (44) and (45), we can also add the triple (:a :b) :getAppend (:c :d). to our initial rule (24). With the following rules, we retrieve the same result as above:
$N_3$
reasoners should support backwards-reasoning as a way to only produce triples when these are needed to find instances for a goal. Following the findings of the previous subsection, it is not true that we necessarily need backward rules to support triple production on-demand. Instead of writing rule (44) and (45), we can also add the triple (:a :b) :getAppend (:c :d). to our initial rule (24). With the following rules, we retrieve the same result as above:
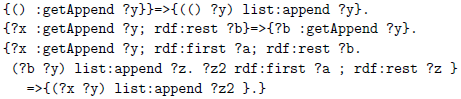
These rules follow the structure of the rules in the previous subsection with the exception that we do not need list constructors in
 $N_3$
. If we apply our rules to the fact above, we sucessively construct the triples (() (:c :d)) list:append (:c :d)., ((:b) (:c :d)) list:append (:b :c :d)., and ((:a :b) (:c :d)) list:append (:a :b :c :d).. These can then directly be used in rules. In more complicated cases, where the arguments of the predicate list:append do not appear partially instantiated in rule bodies, the relevant instances of the fact ?x :getAppend ?y. need to be constructed via rules just as it is the case for existential rules. As
$N_3$
. If we apply our rules to the fact above, we sucessively construct the triples (() (:c :d)) list:append (:c :d)., ((:b) (:c :d)) list:append (:b :c :d)., and ((:a :b) (:c :d)) list:append (:a :b :c :d).. These can then directly be used in rules. In more complicated cases, where the arguments of the predicate list:append do not appear partially instantiated in rule bodies, the relevant instances of the fact ?x :getAppend ?y. need to be constructed via rules just as it is the case for existential rules. As
 $N_3$
follows the axioms introduced in Subsection 5.1, the first-rest interpretation of RDF lists is equivalent to
$N_3$
follows the axioms introduced in Subsection 5.1, the first-rest interpretation of RDF lists is equivalent to
 $N_3$
’s representation of lists as first-class citizens. As a consequence, the rules actually work for all examples introduced above. Similarly, the other list predicates can be written by means of rdf:first and rdf:rest, and handled via backward-chaining or, alternatively, with some version of the chase.
$N_3$
’s representation of lists as first-class citizens. As a consequence, the rules actually work for all examples introduced above. Similarly, the other list predicates can be written by means of rdf:first and rdf:rest, and handled via backward-chaining or, alternatively, with some version of the chase.
Note, the backward rules handling list:append can be mimicked by splitting them in several forward rules acting on a getter triple, that is, a triple causing the production of the required instance of the predicate. We additionally need rules producing the required instances of that getter triple, at which point we need to be careful considering dependencies between triples. However, the mechanism introduced in the previous subsection provides us with a possibility to do reasoning on-demand in a purely forward manner.
6 Evaluation
The considerations provided above allow us to use existential rule reasoners to perform
 ${N_3}{}^\exists$
reasoning. We would like to find out whether our finding is of practical relevance, that is whether we can identify datasets on which existential rule reasoners, running on the rule translations, outperform classical
${N_3}{}^\exists$
reasoning. We would like to find out whether our finding is of practical relevance, that is whether we can identify datasets on which existential rule reasoners, running on the rule translations, outperform classical
 $N_3$
reasoners provided with the original data.
$N_3$
reasoners provided with the original data.
In order to do this we have implemented
 $\mathcal{T}$
as a python script that takes an arbitrary
$\mathcal{T}$
as a python script that takes an arbitrary
 ${N_3}^\exists$
formula
${N_3}^\exists$
formula
 $f$
, constructs its set representation
$f$
, constructs its set representation
 $F$
in PNF, and produces the set of rules
$F$
in PNF, and produces the set of rules
 $\mathcal{T}(F)$
. This script and some additional scripts to translate existential rules (with at most binary predicates) to
$\mathcal{T}(F)$
. This script and some additional scripts to translate existential rules (with at most binary predicates) to
 ${N_3}^\exists$
formulae are available on GitHub. Our implementation allows us to compare
${N_3}^\exists$
formulae are available on GitHub. Our implementation allows us to compare
 $N_3$
reasoners with existential rule reasoners, performance-wise. As existential rule reasoners we chose VLog (Carral et al. Reference Carral, Dragoste, González, Jacobs, Krötzsch, Urbani and Ghidini2019), a state-of-the-art reasoning engine designed for working with large piles of input data, and Nemo (Ivliev et al. Reference Ivliev, Ellmauthaler, Gerlach, Marx, Meissner, Meusel, Krötzsch, Pontelli, Costantini, Dodaro, Gaggl, Calegari, d’Avila Garcez, Fabiano, Mileo, Russo and Toni2023), a recently released rust-based reasoning engine. As
$N_3$
reasoners with existential rule reasoners, performance-wise. As existential rule reasoners we chose VLog (Carral et al. Reference Carral, Dragoste, González, Jacobs, Krötzsch, Urbani and Ghidini2019), a state-of-the-art reasoning engine designed for working with large piles of input data, and Nemo (Ivliev et al. Reference Ivliev, Ellmauthaler, Gerlach, Marx, Meissner, Meusel, Krötzsch, Pontelli, Costantini, Dodaro, Gaggl, Calegari, d’Avila Garcez, Fabiano, Mileo, Russo and Toni2023), a recently released rust-based reasoning engine. As
 $N_3$
reasoners we chose cwm (Berners-Lee Reference Berners-Lee2009) and EYE (Verborgh and De Roo Reference Verborgh and De roo2015) which – due to their good coverage of
$N_3$
reasoners we chose cwm (Berners-Lee Reference Berners-Lee2009) and EYE (Verborgh and De Roo Reference Verborgh and De roo2015) which – due to their good coverage of
 $N_3$
features – are most commonly used. All experiments have been performed on a laptop with 11th Gen Intel Core i7-1165G7 CPU, 32 GB of RAM, and 1TB disk capacity, running a Ubuntu 22.04 LTS.
$N_3$
features – are most commonly used. All experiments have been performed on a laptop with 11th Gen Intel Core i7-1165G7 CPU, 32 GB of RAM, and 1TB disk capacity, running a Ubuntu 22.04 LTS.
6.1 Datasets
We performed our experiments on two datasets: Lubm from the Chasebench (Benedikt et al. Reference Benedikt, Konstantinidis, Mecca, Motik, Papotti, Santoro, Tsamoura, Sallinger, den Bussche and Geerts2017) provides a fixed set of 136 rules and varies in the number of facts these rules are applied; the Deep Taxonomy (DT) benchmark developed for the WellnessRules project (Boley et al. Reference Boley, Osmun, Craig, Governatori, Hall and Paschke2009) consists of one single fact and a varying number of mutually dependent rules.
The Chasebench is a benchmarking suite for existential rule reasoning. Among the different scenaria in Chasebench we picked Lubm for its direct compatibility with
 $N_3$
: all predicates in Lubm have at most arity
$N_3$
: all predicates in Lubm have at most arity
 $2$
. Furthermore, Lubm allows for a glimpse on scalability since Lubm comes in different database sizes. We have worked with Lubm 001, 010, and 100, roughly referring to dataset sizes of a hundred thousand, one million and ten million facts. We translated Lubm data and rules into a canonical
$2$
. Furthermore, Lubm allows for a glimpse on scalability since Lubm comes in different database sizes. We have worked with Lubm 001, 010, and 100, roughly referring to dataset sizes of a hundred thousand, one million and ten million facts. We translated Lubm data and rules into a canonical
 $N_3$
format. Predicate names and constants within the dataset become IRIs using the example prefix. An atom like
$N_3$
format. Predicate names and constants within the dataset become IRIs using the example prefix. An atom like
 $\textit {src_advisor}(\textit {Student441},\textit {Professor8})$
becomes the triple
$\textit {src_advisor}(\textit {Student441},\textit {Professor8})$
becomes the triple
 $\mathtt {:Student441\;\;:src\_advisor\;\;:Professor8.}$
. For atoms using unary predicates, like
$\mathtt {:Student441\;\;:src\_advisor\;\;:Professor8.}$
. For atoms using unary predicates, like
 $\textit {TeachingAssistent}(\textit {Student498})$
, we treat
$\textit {TeachingAssistent}(\textit {Student498})$
, we treat
 $\mathtt {:TeachingAssistent}$
as a class and relate
$\mathtt {:TeachingAssistent}$
as a class and relate
 $\mathtt {:Student498}$
via
$\mathtt {:Student498}$
via
 $\mathtt {rdf:type}$
to the class. For any atom
$\mathtt {rdf:type}$
to the class. For any atom
 $A$
, we denote its canonical translation into triple format by
$A$
, we denote its canonical translation into triple format by
 $t(A)$
. Note this canonical translation only applies to atoms of unary and binary predicates. For the existential rule
$t(A)$
. Note this canonical translation only applies to atoms of unary and binary predicates. For the existential rule
 \begin{equation*}\forall \mathbf{x} .\ B_{1} \wedge \ldots \wedge B_{m} \rightarrow \exists \mathbf{z} .\ H_{1} \wedge \ldots \wedge H_{n}\end{equation*}
\begin{equation*}\forall \mathbf{x} .\ B_{1} \wedge \ldots \wedge B_{m} \rightarrow \exists \mathbf{z} .\ H_{1} \wedge \ldots \wedge H_{n}\end{equation*}
we obtain the canonical translation by applying
 $t$
to all atoms, respecting universally and existentially quantified variables (i.e., universally quantified variables are translated to universal
$t$
to all atoms, respecting universally and existentially quantified variables (i.e., universally quantified variables are translated to universal
 $N_3$
variables and existentially quantified variables become blank nodes):
$N_3$
variables and existentially quantified variables become blank nodes):
 \begin{equation*}\mathtt {\{} t(B_{1})\mathtt {.} \cdots t(B_{m})\mathtt {.} \mathtt {\}}\mathtt {= \gt }\mathtt {\{} t(H_{1})\mathtt {.} \cdots t(H_{n})\mathtt {.} \mathtt {\}}\text .\end{equation*}
\begin{equation*}\mathtt {\{} t(B_{1})\mathtt {.} \cdots t(B_{m})\mathtt {.} \mathtt {\}}\mathtt {= \gt }\mathtt {\{} t(H_{1})\mathtt {.} \cdots t(H_{n})\mathtt {.} \mathtt {\}}\text .\end{equation*}
All
 $N_3$
reasoners have reasoned over the canonical translation of data and rules which was necessary because of the lack of an
$N_3$
reasoners have reasoned over the canonical translation of data and rules which was necessary because of the lack of an
 $N_3$
version of Lubm. Since we are evaluating VLog’s and Nemo’s performance on our translation
$N_3$
version of Lubm. Since we are evaluating VLog’s and Nemo’s performance on our translation
 $\mathcal{T}$
, we converted the translated Lubm by
$\mathcal{T}$
, we converted the translated Lubm by
 $\mathcal{T}$
back to existential rules before reasoning. Thereby, former unary and binary atoms were turned into triples and then uniformly translated to
$\mathcal{T}$
back to existential rules before reasoning. Thereby, former unary and binary atoms were turned into triples and then uniformly translated to
 $\textit {tr}$
-atoms via
$\textit {tr}$
-atoms via
 $\mathcal{T}$
.
$\mathcal{T}$
.
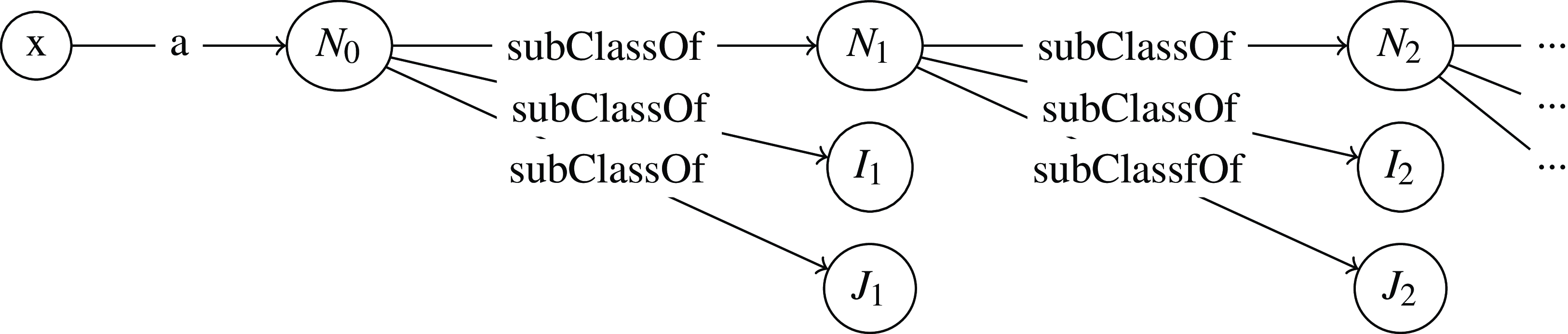
Fig. 2. Structure of the deep taxonomy benchmark.
The Deep Taxonomy benchmark simulates deeply nested RDFS-subclass reasoning.Footnote
22
It contains one individual which is member of a class. This class is subclass of three other classes of which one again is subclass of three more classes and so on. Figure 2 illustrates this idea. The benchmark provides different depths for the subclass chain and we tested with the depths of 1,000 and 100,000. The reasoning tests for the membership of the individual in the last class of the chain. For our tests, the subclass declarations were translated to rules, the triple
 $\mathtt {:N0\;\;rdfs:subClassOf\;\;:N1.}$
became
$\mathtt {:N0\;\;rdfs:subClassOf\;\;:N1.}$
became
{ ?x a :N0.}= > { ?x a :N1.}.
This translation also illustrates why this rather simple reasoning case is interesting: we have a use case in which we depend on long chains of rules executed after each other. The reasoner EYE allows the user to decide per rule whether it is applied using forward- or backward-reasoning, at least if the head of the rule does not contain blank nodes. For this dataset, we evaluated full backward- and full forward-reasoning, separately.
6.2 Results
Table 1 presents the running times of the four reasoners and additionally gives statistics about the sizes of the given knowledge base (# facts) and the rule set (# rules). For DT we display two reasoning times for EYE, one produced by only forward reasoning (EYE-fw), one for only backward-reasoning (EYE-bw). Note, that for the latter, the reasoner does not produce the full deductive closure of the dataset, but answers a query instead. As Lubm contains rules with blank nodes in their haeds, full backward reasoning was not possible in that case, the table is left blank. EYE performs much better than VLog and Nemo for the experiments with DT. Its reasoning time is off by one order of magnitude. Conversely, VLog and Nemo could reason over all the Lubm datasets while EYE has thrown an exception after having read the input facts. The reasoning times of VLog are additionally significantly lower than the times for EYE. While Nemo shows a similar runtime on DT as VLog, it is slower on Lubm. However, we may be quite optimistic regarding its progress in runtime behavior, as Nemo already shows better running times on the original Lubm datasets. The reasoner cwm is consistently slower than the other three and from Lubm 010 on. All reasoners tried to find the query answers/deductive closures for at least ten minutes (i.e., — in Table 1 indicates a time-out).
Table 1. Experimental results
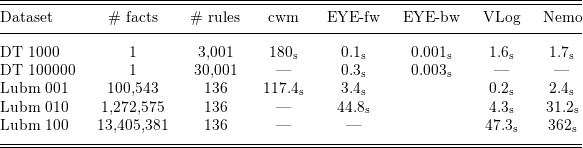
6.3 Discussion
In all our tests we observe a very poor performance of cwm which is not surprising, given that this reasoner has not been updated for some time. The results for EYE, VLog and Nemo are more interesting as they illustrate the different strengths of the reasoners.
For very high numbers of rules compared to the amount of data, EYE performs much better than VLog and Nemo. The good results of 0.1 and 0.3 s can even be improved by using backward reasoning. This makes EYE very well-suited for use cases where we need to apply complex rules on datasets of low or medium size. This could be interesting in decentralized set-ups such as policy-based access control for the Solidproject.Footnote 23 On the other hand we see that VLog and Nemo perform best when provided with large datasets and lower numbers of rules. This could be useful use cases involving bigger datasets in the Web like Wikidata or DBpedia.Footnote 24
From the perspective of this paper, these two findings together show the relevance of our work: we observed big differences between the tools’ reasoning times and these differences depended on the use cases. In other words, there are use cases which could benefit from our translation and we thus do not only make the first steps towards having more
 $N_3$
reasoners available but also broaden the scope of possible
$N_3$
reasoners available but also broaden the scope of possible
 $N_3$
applications.
$N_3$
applications.
7 Related work
When originally proposed as a W3C member submission (Berners-Lee and Connolly Reference Berners-Lee and Connolly2011), the formal semantics of
 $N_3$
was only introduced informally. As a consequence, different systems, using
$N_3$
was only introduced informally. As a consequence, different systems, using
 $N_3$
, interpreted concepts like nested formulae differently (Arndt et al. Reference Arndt, Schrijvers, De roo and Verborgh2019). Since then, the relation of
$N_3$
, interpreted concepts like nested formulae differently (Arndt et al. Reference Arndt, Schrijvers, De roo and Verborgh2019). Since then, the relation of
 $N_3$
to other Web standards has been studied from a use-case perspective (Arndt Reference Arndt2019) and a W3C Community group has been formed (Woensel et al. Reference Woensel, Arndt, Champin, Tomaszuk and Kellogg2023), which recently published the semantics of
$N_3$
to other Web standards has been studied from a use-case perspective (Arndt Reference Arndt2019) and a W3C Community group has been formed (Woensel et al. Reference Woensel, Arndt, Champin, Tomaszuk and Kellogg2023), which recently published the semantics of
 $N_3$
without functions (Arndt and Champin Reference Arndt and Champin2023). Even with these definitions, the semantic relation of the logic to other standards, especially outside the Semantics Web, has not been studied thoroughly.
$N_3$
without functions (Arndt and Champin Reference Arndt and Champin2023). Even with these definitions, the semantic relation of the logic to other standards, especially outside the Semantics Web, has not been studied thoroughly.
For
 $N_3$
’s subset RDF, (De bruijn and Heymans Reference De bruijn, Heymans, Aberer, Choi, Noy, Allemang, Lee, Nixon, Golbeck, Mika, Maynard, Mizoguchi, Schreiber and Cudré-Mauroux2007) provide a translation to first-order logic and F-Logic using similar embeddings (e.g., a tenary predicate to represent triples) to the ones in this paper, but do not cover rules. Boley (Reference Boley, Alferes, Bertossi, Governatori, Fodor and Roman2016) supports
$N_3$
’s subset RDF, (De bruijn and Heymans Reference De bruijn, Heymans, Aberer, Choi, Noy, Allemang, Lee, Nixon, Golbeck, Mika, Maynard, Mizoguchi, Schreiber and Cudré-Mauroux2007) provide a translation to first-order logic and F-Logic using similar embeddings (e.g., a tenary predicate to represent triples) to the ones in this paper, but do not cover rules. Boley (Reference Boley, Alferes, Bertossi, Governatori, Fodor and Roman2016) supports
 $N_3$
in his RuleML Knowledge-Interoperation Hub providing a translation of
$N_3$
in his RuleML Knowledge-Interoperation Hub providing a translation of
 $N_3$
to PSOA RuleML. This can be translated to other logics. But the focus is more on syntax than on semantics.
$N_3$
to PSOA RuleML. This can be translated to other logics. But the focus is more on syntax than on semantics.
In Description Logics (DL), rewritings in rule-based languages have their own tradition (see, e.g., Carral and Krötzsch (Reference Carral, Krötzsch and Bessiere2020) for a good overview of existing rewritings and their complexity, as well as more references). The goal there is to (1) make state-of-the-art rule reasoners available for DLs and, thereby, (2) use a fragment of a rule language that reflects on the data complexity of the given DL fragment. Also practical tools have been designed to capture certain profiles of the Web Ontology Language (OWL), like the Orel system (Krötzsch et al. Reference Krötzsch, Mehdi, Rudolph, Haarslev, Toman and Weddell2010) and, more recently, DaRLing (Fiorentino et al. Reference Fiorentino, Zangari and Manna2020). To the best of our knowledge, a rewriting for
 $N_3$
as presented in this paper did not exist before. Also, existential rule reasoning engines have not been compared to the existing
$N_3$
as presented in this paper did not exist before. Also, existential rule reasoning engines have not been compared to the existing
 $N_3$
reasoners.
$N_3$
reasoners.
8 Conclusion
In this paper we studied the close relationship between
 $N_3$
rules supporting blank node production and existential rules.
$N_3$
rules supporting blank node production and existential rules.
 $N_3$
without special features like built-in functions, nesting of rules, or quotation can be directly mapped to existential rules with ternary predicates. In order to show that, we defined a mapping between
$N_3$
without special features like built-in functions, nesting of rules, or quotation can be directly mapped to existential rules with ternary predicates. In order to show that, we defined a mapping between
 ${N_3}^\exists$
–
${N_3}^\exists$
–
 $N_3$
without the aforementioned features – and existential rules. We argued that this mapping and its inverse preserve the equivalence and non-equivalence between datasets. This result allows us to trust the reasoning results when applying the mapping in practice, that is, when (1) translating
$N_3$
without the aforementioned features – and existential rules. We argued that this mapping and its inverse preserve the equivalence and non-equivalence between datasets. This result allows us to trust the reasoning results when applying the mapping in practice, that is, when (1) translating
 ${N_3}^\exists$
to existential rules, (2) reasoning within that framework, and (3) using the inverse mapping to transfer the result back into
${N_3}^\exists$
to existential rules, (2) reasoning within that framework, and (3) using the inverse mapping to transfer the result back into
 $N_3$
.
$N_3$
.
We applied that strategy and compared the reasoning times of the
 $N_3$
reasoners cwm and EYE with the existential rule reasoners VLog and Nemo. The goal of that comparison was to find out whether there are use cases for which
$N_3$
reasoners cwm and EYE with the existential rule reasoners VLog and Nemo. The goal of that comparison was to find out whether there are use cases for which
 $N_3$
reasoning can benefit from the findings on existential rules. We tested the reasoners on two datasets: DT consisting of one single fact and a varying number of mutually dependent rules and Lubm consisting of a fixed number of rules and a varying number of facts. EYE performs better on DT while VLog and Nemo showed their strength on Lubm. We see that as an indication that for use cases of similar nature, that is, reasoning on large numbers of facts, our approach could be used to improve reasoning times. More generally, we see that reasoners differ in their strengths and that, by providing the reversible translation between
$N_3$
reasoning can benefit from the findings on existential rules. We tested the reasoners on two datasets: DT consisting of one single fact and a varying number of mutually dependent rules and Lubm consisting of a fixed number of rules and a varying number of facts. EYE performs better on DT while VLog and Nemo showed their strength on Lubm. We see that as an indication that for use cases of similar nature, that is, reasoning on large numbers of facts, our approach could be used to improve reasoning times. More generally, we see that reasoners differ in their strengths and that, by providing the reversible translation between
 ${N_3}^\exists$
and existential rules, we increase the number of reasoners (partly) supporting
${N_3}^\exists$
and existential rules, we increase the number of reasoners (partly) supporting
 $N_3$
and the range of use cases the logic can support in practice. We see our work as an important step towards fully establishing rule-based reasoning in the Semantic Web.
$N_3$
and the range of use cases the logic can support in practice. We see our work as an important step towards fully establishing rule-based reasoning in the Semantic Web.
Of course,
 $N_3$
also contains constructs and built-in predicates which are not supported (yet) by our translation. In order to test how extensible our framework is, we provided strategies to also cover lists and their built-in predicates in the translation. Lists were constructed using nulls, which made reasoning with them dependent on the chase applicable. We provided rules to mimic the list-append function of
$N_3$
also contains constructs and built-in predicates which are not supported (yet) by our translation. In order to test how extensible our framework is, we provided strategies to also cover lists and their built-in predicates in the translation. Lists were constructed using nulls, which made reasoning with them dependent on the chase applicable. We provided rules to mimic the list-append function of
 $N_3$
under the standard chase, which is also implemented in some
$N_3$
under the standard chase, which is also implemented in some
 $N_3$
reasoners. The existential rules version of the append function came with rules that allow for list construction on-demand. This on-demandness is very interesting in many situations and, maybe even more important, believed by the
$N_3$
reasoners. The existential rules version of the append function came with rules that allow for list construction on-demand. This on-demandness is very interesting in many situations and, maybe even more important, believed by the
 $N_3$
community to only be possible employing backward reasoning. In that sense we also contribute to the ongoing discussion in that community whether the intended reasoning direction should be part of the semantics, which we would clearly argue against.
$N_3$
community to only be possible employing backward reasoning. In that sense we also contribute to the ongoing discussion in that community whether the intended reasoning direction should be part of the semantics, which we would clearly argue against.
As many
 $N_3$
use cases rely on more powerful
$N_3$
use cases rely on more powerful
 $N_3$
predicates and logical features such as support for graph terms and nested rules, future work should include the extension of our translation towards full coverage of
$N_3$
predicates and logical features such as support for graph terms and nested rules, future work should include the extension of our translation towards full coverage of
 $N_3$
. As a direct candidate, we would like to investigate the intricate consequences of non-monotonic reasoning in the presence of existentially quantified variables (Ellmauthaler et al. Reference Ellmauthaler, Krötzsch, Mennicke, Brodley and Stone2022). Another direction of future work is to investigate the differences and similarities we found in our evaluation in more detail: while showing differences in their performance, the reasoners produced the exact same result sets (modulo isomorphism) when acting on rules introducing blank nodes. That is, the different reasoning times do not stem from handling of existentially quantified rule heads but from other optimization techniques. Fully understanding these differences will help the
$N_3$
. As a direct candidate, we would like to investigate the intricate consequences of non-monotonic reasoning in the presence of existentially quantified variables (Ellmauthaler et al. Reference Ellmauthaler, Krötzsch, Mennicke, Brodley and Stone2022). Another direction of future work is to investigate the differences and similarities we found in our evaluation in more detail: while showing differences in their performance, the reasoners produced the exact same result sets (modulo isomorphism) when acting on rules introducing blank nodes. That is, the different reasoning times do not stem from handling of existentially quantified rule heads but from other optimization techniques. Fully understanding these differences will help the
 $N_3$
and the existential rules communities to further improve their tools. In that context, it would also be interesting to learn if EYE’s capability to combine forward and backward reasoning could improve the reasoning times for data sets including existentially quantified rule heads.
$N_3$
and the existential rules communities to further improve their tools. In that context, it would also be interesting to learn if EYE’s capability to combine forward and backward reasoning could improve the reasoning times for data sets including existentially quantified rule heads.
We thus hope that our research on existential
 $N_3$
will spawn further investigations of powerful data-centric features in data-intensive rule reasoning as well as significant progress in tool support towards these features. Ultimately, we envision a Web of data and rule exchange, fully supported by the best tools available as converging efforts of the
$N_3$
will spawn further investigations of powerful data-centric features in data-intensive rule reasoning as well as significant progress in tool support towards these features. Ultimately, we envision a Web of data and rule exchange, fully supported by the best tools available as converging efforts of the
 $N_3$
community, the existential rule reasoning community, and possibly many others.
$N_3$
community, the existential rule reasoning community, and possibly many others.
Acknowledgements
This work is partly supported by Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) in project number 389792660 (TRR 248, Center for Perspicuous Systems), by the Bundesministerium für Bildung und Forschung (BMBF, Federal Ministry of Education and Research) in project number 13GW0552B (KIMEDS), in the Center for Scalable Data Analytics and Artificial Intelligence (ScaDS.AI), and by BMBF and DAAD (German Academic Exchange Service) in project 57616814 (SECAI, School of Embedded and Composite AI).
This is an extended version of a paper presented at the 2023 RuleML+RR Conference. The authors are grateful to Anna Fensel, Ana Ozaki and Ahmet Soylu, the conference program co-chairs, for encouraging us to submit the paper to the journal Theory and Practice of Logic Programming and for their help in overseeing the review process.














 Open access
Open access