


1. Introduction
The aim of this article is to develop the synthetic study of Lorentzian geometry. Synthetic geometry is concerned with geometric spaces without differentiable structures, such as metric (measure) spaces. For instance, for a complete Riemannian manifold, every small triangle drawn with geodesics is thinner than its comparison triangle (with the same sidelengths) in  $\mathbf R^2$ if and only if the sectional curvature is nonpositive everywhere (Alexandrov’s triangle comparison theorem; see, e.g., [Reference Bridson and Haefliger11, Theorem II.1A.6]). Then, the triangle comparison property can be adopted as a synthetic notion of nonpositive curvature; a (geodesic) metric space
$\mathbf R^2$ if and only if the sectional curvature is nonpositive everywhere (Alexandrov’s triangle comparison theorem; see, e.g., [Reference Bridson and Haefliger11, Theorem II.1A.6]). Then, the triangle comparison property can be adopted as a synthetic notion of nonpositive curvature; a (geodesic) metric space  $(X,d)$ is called a CAT
$(X,d)$ is called a CAT  $(0)$-space if triangles in
$(0)$-space if triangles in  $X$ are thinner than
$X$ are thinner than  $\mathbf R^2$. In the same manner, one can define metric spaces of sectional curvature bounded below (Alexandov spaces; see [Reference Alexander, Kapovitch and Petrunin2, Reference Burago, Burago and Ivanov12]), and metric measure spaces of Ricci curvature
$\mathbf R^2$. In the same manner, one can define metric spaces of sectional curvature bounded below (Alexandov spaces; see [Reference Alexander, Kapovitch and Petrunin2, Reference Burago, Burago and Ivanov12]), and metric measure spaces of Ricci curvature  $\ge K$ and dimension
$\ge K$ and dimension  $\le N$ (MCP
$\le N$ (MCP $(K,N)$-spaces (MCP stands for measure contraction property) and CD
$(K,N)$-spaces (MCP stands for measure contraction property) and CD $(K,N)$-spaces (CD stands for curvature-dimension condition); see [Reference Lott and Villani28, Reference Ohta37, Reference Sturm39, Reference Sturm40]). These synthetic approaches enable us to understand the influence of curvature in a geometric and intuitive way, and to investigate metric (measure) spaces arising as limit spaces of Riemannian manifolds, leading on to fruitful applications in Riemannian geometry and beyond.
$(K,N)$-spaces (CD stands for curvature-dimension condition); see [Reference Lott and Villani28, Reference Ohta37, Reference Sturm39, Reference Sturm40]). These synthetic approaches enable us to understand the influence of curvature in a geometric and intuitive way, and to investigate metric (measure) spaces arising as limit spaces of Riemannian manifolds, leading on to fruitful applications in Riemannian geometry and beyond.
Recently, there has been a growing interest in synthetic approaches to Lorentzian geometry, partly motivated by the appearance of less regular spacetimes in general relativity (as solutions to the Einstein equation). For time-oriented Lorentzian manifolds (spacetimes), suitable counterparts to the triangle comparison properties are known to characterize lower and upper sectional curvature bounds in timelike directions (see [Reference Alexander and Bishop1, Reference Beran, Kunzinger, Ohanyan and Rott6, Reference Harris20]). Then, as a platform for synthetic Lorentzian geometry, Lorentzian (pre-)length spaces are introduced [Reference Kunzinger and Sämann26], and the structure of Lorentzian (pre-)length spaces of curvature bounded below or above in the sense of triangle comparison is the subject of current active research (see, e.g., [Reference Beran, Ohanyan, Rott and Solis8, Reference Beran and Sämann9]). We also refer to [Reference Cavalletti and Mondino15, Reference McCann32, Reference Mondino and Suhr35] for a synthetic approach to lower Ricci curvature bounds (timelike curvature-dimension condition TCD $(K,N)$), to name a few.
$(K,N)$), to name a few.
For metric spaces, there is also a weaker notion of nonpositive curvature than CAT $(0)$-spaces, going back to a seminal work of Busemann [Reference Busemann13], called the convexity or the Busemann nonpositive curvature. Let
$(0)$-spaces, going back to a seminal work of Busemann [Reference Busemann13], called the convexity or the Busemann nonpositive curvature. Let  $(X,d)$ be a geodesic space, i.e., any pair
$(X,d)$ be a geodesic space, i.e., any pair  $x,y \in X$ of points can be joined by a curve
$x,y \in X$ of points can be joined by a curve  $\gamma\colon [0,1] \longrightarrow X$ such that
$\gamma\colon [0,1] \longrightarrow X$ such that  $\gamma(0)=x$,
$\gamma(0)=x$,  $\gamma(1)=y$ and
$\gamma(1)=y$ and  $d(\gamma(s),\gamma(t))=|t-s|d(x,y)$ for all
$d(\gamma(s),\gamma(t))=|t-s|d(x,y)$ for all  $s,t \in [0,1]$ (then
$s,t \in [0,1]$ (then  $\gamma$ is called a minimizing geodesic). We say that
$\gamma$ is called a minimizing geodesic). We say that  $(X,d)$ is locally convex if every point
$(X,d)$ is locally convex if every point  $x \in X$ has a neighbourhood
$x \in X$ has a neighbourhood  $U$ such that, for any minimizing geodesics
$U$ such that, for any minimizing geodesics  $\gamma_1,\gamma_2\colon [0,1] \longrightarrow X$ included in
$\gamma_1,\gamma_2\colon [0,1] \longrightarrow X$ included in  $U$, the function
$U$, the function  $t \longmapsto d(\gamma_1(t),\gamma_2(t))$ is convex. If we can take
$t \longmapsto d(\gamma_1(t),\gamma_2(t))$ is convex. If we can take  $U=X$,
$U=X$,  $(X,d)$ is said to be globally convex. For Riemannian manifolds, local convexity is equivalent to having the nonpositive sectional curvature everywhere.
$(X,d)$ is said to be globally convex. For Riemannian manifolds, local convexity is equivalent to having the nonpositive sectional curvature everywhere.
An important feature of Busemann’s convexity is that it does not rule out Finsler manifolds. For example, strictly convex Banach spaces are clearly globally convex, while only Hilbert spaces are CAT $(0)$ among Banach spaces. Therefore, it had been an intriguing problem to characterize convex spaces among Finsler manifolds. It was first shown in [Reference Kristály, Varga and Kozma25] that a Berwald manifold, a special kind of Finsler manifold, of nonpositive flag curvature is locally convex (flag curvature in Finsler geometry corresponds to sectional curvature in Riemannian geometry). Then, [Reference Kristály and Kozma24] proved that a Berwald manifold is locally convex only if its flag curvature is nonpositive everywhere. Finally, it was established in [Reference Ivanov and Lytchak21] that a Finsler manifold is locally convex if and only if it is a Berwald manifold of nonpositive flag curvature. We refer to [Reference Fujioka and Gu17] for a recent study of the structure of convex metric spaces, where we need to deal with the Finsler (non-Riemannian) nature of those spaces (see also [Reference Han and Yin19, Reference Kell22] for related works concerning nonnegative curvature).
$(0)$ among Banach spaces. Therefore, it had been an intriguing problem to characterize convex spaces among Finsler manifolds. It was first shown in [Reference Kristály, Varga and Kozma25] that a Berwald manifold, a special kind of Finsler manifold, of nonpositive flag curvature is locally convex (flag curvature in Finsler geometry corresponds to sectional curvature in Riemannian geometry). Then, [Reference Kristály and Kozma24] proved that a Berwald manifold is locally convex only if its flag curvature is nonpositive everywhere. Finally, it was established in [Reference Ivanov and Lytchak21] that a Finsler manifold is locally convex if and only if it is a Berwald manifold of nonpositive flag curvature. We refer to [Reference Fujioka and Gu17] for a recent study of the structure of convex metric spaces, where we need to deal with the Finsler (non-Riemannian) nature of those spaces (see also [Reference Han and Yin19, Reference Kell22] for related works concerning nonnegative curvature).
As a Lorentzian counterpart to Busemann’s convexity, the concavity of time separation functions on Lorentzian pre-length spaces of nonnegative curvature in the sense of triangle comparison was proved in [Reference Beran, Kunzinger and Rott.7, Section 6]. Moreover, a globalization result for such a concavity was established in [Reference Erös and Gieger16] (see Remark 3.9). Then, in comparison with convexity, it is natural to ask an analogue to the above characterization of convex Finsler or Berwald manifolds. Our main theorem provides an answer to this question in the setting of Berwald spacetimes.
Theorem 1.1 (Characterizations of concavity)
Let  $(M,L)$ be a Berwald spacetime. Then, the following are equivalent.
$(M,L)$ be a Berwald spacetime. Then, the following are equivalent.
(I)
 $(M,L)$ has nonnegative flag curvature
$\mathbf{K} \ge 0$ in timelike directions, namely
$\mathbf{K}(v,w) \ge 0$ for every pair of linearly independent vectors
$v,w \in T_xM$ such that
$v$ is future-directed timelike.
$(M,L)$ has nonnegative flag curvature
$\mathbf{K} \ge 0$ in timelike directions, namely
$\mathbf{K}(v,w) \ge 0$ for every pair of linearly independent vectors
$v,w \in T_xM$ such that
$v$ is future-directed timelike.(II)
$(M,L)$ is locally concave.(III)
$(M,L)$ is locally timelike concave.(IV)
$(M,L)$ has convex future capsules.(V)
$(M,L)$ has convex past capsules.



See Definition 3.1 for the precise definition of local (timelike) concavity. Having convex future or past capsules is a condition inspired by [Reference Kristály and Kozma24]; see Definition 4.1. Finsler spacetimes generalize usual (Lorentzian) spacetimes in the same way that Finsler manifolds generalize Riemannian manifolds, and the Berwald condition is defined in the same way as well. Finsler and Berwald spacetimes have been studied from both geometric and physical viewpoints (see Section 2).
Theorem 1.1 is new even in the case of Lorentzian manifolds. Then, the equivalence between local (timelike) concavity and nonnegative sectional curvature can be regarded as a direct adaptation of the aforementioned result of Busemann [Reference Busemann13] to the Lorentzian setting.
Corollary 1.2. (Lorentzian case)
Let  $(M,g)$ be a Lorentzian spacetime. Then, the following are equivalent.
$(M,g)$ be a Lorentzian spacetime. Then, the following are equivalent.
(I)
$(M,g)$ has nonnegative sectional curvature in timelike directions.(II)
$(M,g)$ is locally concave.(III)
$(M,g)$ is locally timelike concave.(IV)
$(M,g)$ has convex future capsules.(V)
$(M,g)$ has convex past capsules.
Our proof of Theorem 1.1 follows the lines of [Reference Kristály and Kozma24, Reference Kristály, Varga and Kozma25]. Due to a common difficulty in Lorentzian geometry, the noncompactness of the indicatrix in the tangent spaces, we could not generalize the argument in [Reference Ivanov and Lytchak21]. Thus, it remains an open question whether locally (timelike) concave Finsler spacetimes necessarily satisfy the Berwald condition (see Subsection 5.1 for more details).
This article is organized as follows. After reviewing the basics of Finsler spacetimes in Section 2, we prove the equivalence between concavity and nonnegative flag curvature in Section 3. We then give another characterization of nonnegative flag curvature by convex capsules in Section 4. Finally, Section 5 is devoted to discussing some open problems on concavity, compared to the convexity of metric spaces.
2. Finsler spacetimes
We review the basics of Finsler spacetimes (see [Reference Beem, Ehrlich and Easley5, Reference O’Neill36] for the standard theory of Lorentzian spacetimes). Our definition of Finsler spacetimes follows Beem’s one [Reference Beem4] (see [Reference Lu, Minguzzi and Ohta29, §2.1] for the relationship with other definitions). Concerning recent developments in Finsler spacetime geometry, we refer to [Reference Lu, Minguzzi and Ohta29, Reference Lu, Minguzzi and Ohta30] for singularity and comparison theorems, [Reference Caponio, Ohanyan and Ohta14, Reference Lu, Minguzzi and Ohta31] for timelike splitting theorems, and to [Reference Braun and Ohta10] for the timelike curvature-dimension condition.
2.1. Lorentz–Finsler manifolds
Throughout the article, let  $M$ be a connected
$M$ be a connected  $C^{\infty}$-manifold without boundary of dimension
$C^{\infty}$-manifold without boundary of dimension  $n\ge 2$.
$n\ge 2$.
Definition 2.1. (Lorentz–Finsler structures)
A Lorentz–Finsler structure on  $M$ is a function
$M$ is a function  $L\colon TM \longrightarrow \mathbf R$ satisfying the following conditions:
$L\colon TM \longrightarrow \mathbf R$ satisfying the following conditions:
(1)
$L \in C^{\infty}(TM \setminus \{0\})$;(2)
$L(cv)=c^2 L(v)$ for all
$v \in TM$ and
$c \gt 0$;(3) For any
$v \in TM \setminus \{0\}$, the symmetric matrix
(2.1)is non-degenerate with signature\begin{equation}
\bigl( g_{ij}(v) \bigr)_{i,j=1}^n
:=\biggl( \frac{\partial^2 L}{\partial v^i \partial v^j}(v) \biggr)_{i,j=1}^n
\end{equation}
$(-,+,\ldots,+)$.







Then, we call  $(M,L)$ a Lorentz–Finsler manifold.
$(M,L)$ a Lorentz–Finsler manifold.
For each  $v \in T_xM \setminus \{0\}$, we can define a Lorentzian metric
$v \in T_xM \setminus \{0\}$, we can define a Lorentzian metric  $g_v$ on
$g_v$ on  $T_xM$ via (2.1) as
$T_xM$ via (2.1) as
 \begin{equation*} g_v \Biggl( \sum_{i=1}^n a_i \frac{\partial}{\partial x^i}\bigg|_x,
\sum_{j=1}^n b_j \frac{\partial}{\partial x^j}\bigg|_x \Biggr)
:=\sum_{i,j=1}^n g_{ij}(v) a_i b_j. \end{equation*}
\begin{equation*} g_v \Biggl( \sum_{i=1}^n a_i \frac{\partial}{\partial x^i}\bigg|_x,
\sum_{j=1}^n b_j \frac{\partial}{\partial x^j}\bigg|_x \Biggr)
:=\sum_{i,j=1}^n g_{ij}(v) a_i b_j. \end{equation*} Note that we have  $g_v(v,v)=2L(v)$ by Euler’s homogeneous function theorem.
$g_v(v,v)=2L(v)$ by Euler’s homogeneous function theorem.
A tangent vector  $v \in TM $ is said to be timelike (resp. null) if
$v \in TM $ is said to be timelike (resp. null) if  $L(v) \lt 0$ (resp.
$L(v) \lt 0$ (resp.  $L(v)=0$). We say that
$L(v)=0$). We say that  $v$ is lightlike if it is null and nonzero, and causal if it is timelike or lightlike. Spacelike vectors are
$v$ is lightlike if it is null and nonzero, and causal if it is timelike or lightlike. Spacelike vectors are  $v \in TM$ such that
$v \in TM$ such that  $L(v) \gt 0$ or
$L(v) \gt 0$ or  $v=0$. Denote by
$v=0$. Denote by  $\Omega'_x \subset T_xM$ the set of timelike vectors. For causal vectors
$\Omega'_x \subset T_xM$ the set of timelike vectors. For causal vectors  $v$, we define
$v$, we define
 \begin{equation}
F(v) :=\sqrt{-2L(v)} =\sqrt{-g_v(v,v)}.
\end{equation}
\begin{equation}
F(v) :=\sqrt{-2L(v)} =\sqrt{-g_v(v,v)}.
\end{equation}Definition 2.2. (Finsler spacetimes)
If a Lorentz–Finsler manifold  $(M,L)$ admits a smooth timelike vector field
$(M,L)$ admits a smooth timelike vector field  $X$, then
$X$, then  $(M,L)$ is said to be time-oriented
$(M,L)$ is said to be time-oriented  $(\textit{by}\,\,\,{X})$. A time-oriented Lorentz–Finsler manifold is called a Finsler spacetime.
$(\textit{by}\,\,\,{X})$. A time-oriented Lorentz–Finsler manifold is called a Finsler spacetime.
In a Finsler spacetime time-oriented by  $X$, a causal vector
$X$, a causal vector  $v \in T_xM$ is said to be future-directed if it lies in the same connected component of
$v \in T_xM$ is said to be future-directed if it lies in the same connected component of  $\overline{\Omega'}\!_x \setminus \{0\}$ as
$\overline{\Omega'}\!_x \setminus \{0\}$ as  $X(x)$. We denote by
$X(x)$. We denote by  $\Omega_x \subset \Omega'_x$ the set of future-directed timelike vectors, and define
$\Omega_x \subset \Omega'_x$ the set of future-directed timelike vectors, and define
 \begin{equation*} \Omega :=\bigcup_{x \in M} \Omega_x. \end{equation*}
\begin{equation*} \Omega :=\bigcup_{x \in M} \Omega_x. \end{equation*} A  $C^1$-curve in
$C^1$-curve in  $M$ is said to be timelike (resp. causal) if its tangent vector is always timelike (resp. causal). Henceforth, unless explicitly stated otherwise, all causal curves are assumed to be future-directed (i.e., its tangent vector is future-directed causal).
$M$ is said to be timelike (resp. causal) if its tangent vector is always timelike (resp. causal). Henceforth, unless explicitly stated otherwise, all causal curves are assumed to be future-directed (i.e., its tangent vector is future-directed causal).
Next, we introduce the covariant derivative. Define
 \begin{equation*} \gamma^i_{jk} (v)
:=\frac{1}{2} \sum_{l=1}^n g^{il}(v)
\biggl( \frac{\partial g_{lk}}{\partial x^j} +\frac{\partial g_{jl}}{\partial x^k} -\frac{\partial g_{jk}}{\partial x^l} \biggr)(v) \end{equation*}
\begin{equation*} \gamma^i_{jk} (v)
:=\frac{1}{2} \sum_{l=1}^n g^{il}(v)
\biggl( \frac{\partial g_{lk}}{\partial x^j} +\frac{\partial g_{jl}}{\partial x^k} -\frac{\partial g_{jk}}{\partial x^l} \biggr)(v) \end{equation*}for  $i,j,k =1,\ldots,n$ and
$i,j,k =1,\ldots,n$ and  $v \in TM\setminus \{0\}$, where
$v \in TM\setminus \{0\}$, where  $(g^{ij}(v))$ is the inverse matrix of
$(g^{ij}(v))$ is the inverse matrix of  $(g_{ij}(v))$;
$(g_{ij}(v))$;
 \begin{equation*} G^i(v) :=\sum_{j,k=1}^n \gamma^i_{jk}(v) v^j v^k, \qquad
N^i_j(v) :=\frac{1}{2}\frac{\partial G^i}{\partial v^j}(v) \end{equation*}
\begin{equation*} G^i(v) :=\sum_{j,k=1}^n \gamma^i_{jk}(v) v^j v^k, \qquad
N^i_j(v) :=\frac{1}{2}\frac{\partial G^i}{\partial v^j}(v) \end{equation*}for  $v \in TM \setminus \{0\}$, and
$v \in TM \setminus \{0\}$, and  $G^i(0)=N^i_j(0):=0$. Moreover, we set
$G^i(0)=N^i_j(0):=0$. Moreover, we set
 \begin{equation}
\Gamma^i_{jk}(v)
:=\gamma^i_{jk}(v) -\frac{1}{2}\sum_{l,m=1}^n g^{il}(v)
\biggl( \frac{\partial g_{lk}}{\partial v^m}N^m_j +\frac{\partial g_{jl}}{\partial v^m} N^m_k
-\frac{\partial g_{jk}}{\partial v^m} N^m_l \biggr)(v)
\end{equation}
\begin{equation}
\Gamma^i_{jk}(v)
:=\gamma^i_{jk}(v) -\frac{1}{2}\sum_{l,m=1}^n g^{il}(v)
\biggl( \frac{\partial g_{lk}}{\partial v^m}N^m_j +\frac{\partial g_{jl}}{\partial v^m} N^m_k
-\frac{\partial g_{jk}}{\partial v^m} N^m_l \biggr)(v)
\end{equation}on  $TM \setminus \{0\}$, and the covariant derivative of a vector field
$TM \setminus \{0\}$, and the covariant derivative of a vector field  $Y=\sum_{i=1}^n Y^i (\partial/\partial x^i)$ is defined as
$Y=\sum_{i=1}^n Y^i (\partial/\partial x^i)$ is defined as
 \begin{equation*} D_v^w Y :=\sum_{i,j=1}^n
\Biggl\{v^j \frac{\partial Y^i}{\partial x^j}(x)
+\sum_{k=1}^n \Gamma^i_{jk}(w) v^j Y^k(x) \Biggr\}
\frac{\partial}{\partial x^i} \bigg|_x \end{equation*}
\begin{equation*} D_v^w Y :=\sum_{i,j=1}^n
\Biggl\{v^j \frac{\partial Y^i}{\partial x^j}(x)
+\sum_{k=1}^n \Gamma^i_{jk}(w) v^j Y^k(x) \Biggr\}
\frac{\partial}{\partial x^i} \bigg|_x \end{equation*}for  $v \in T_xM$ with a reference vector
$v \in T_xM$ with a reference vector  $w \in T_xM \setminus \{0\}$. We remark that the functions
$w \in T_xM \setminus \{0\}$. We remark that the functions  $\Gamma^i_{jk}$ in (2.3) are the coefficients of the Chern(–Rund) connection.
$\Gamma^i_{jk}$ in (2.3) are the coefficients of the Chern(–Rund) connection.
In the Lorentzian case,  $g_{ij}$ is constant in each tangent space (thus,
$g_{ij}$ is constant in each tangent space (thus,  $\Gamma^i_{jk}=\gamma^i_{jk}$) and the covariant derivative does not depend on the choice of a reference vector. In the Lorentz–Finsler setting, the following class is worth considering.
$\Gamma^i_{jk}=\gamma^i_{jk}$) and the covariant derivative does not depend on the choice of a reference vector. In the Lorentz–Finsler setting, the following class is worth considering.
Definition 2.3. (Berwald spacetimes)
A Finsler spacetime  $(M,L)$ is said to be of Berwald type (or called a Berwald spacetime) if
$(M,L)$ is said to be of Berwald type (or called a Berwald spacetime) if  $\Gamma^i_{jk}$ is constant on the slit tangent space
$\Gamma^i_{jk}$ is constant on the slit tangent space  $T_xM \setminus \{0\}$ for every
$T_xM \setminus \{0\}$ for every  $x$.
$x$.
By definition, the covariant derivative on a Berwald spacetime is defined independently of the choice of a reference vector. Thus, in the sequel, reference vectors will be omitted in Berwald spacetimes. An important property of Berwald spacetimes is that, for any  $C^1$-curve
$C^1$-curve  $\eta\colon [0,1] \longrightarrow M$ whose velocity does not vanish, the parallel transport along
$\eta\colon [0,1] \longrightarrow M$ whose velocity does not vanish, the parallel transport along  $\eta$ gives a linear isometry between
$\eta$ gives a linear isometry between  $(T_{\eta(0)}M,L)$ and
$(T_{\eta(0)}M,L)$ and  $(T_{\eta(1)}M,L)$, i.e., for any vector field
$(T_{\eta(1)}M,L)$, i.e., for any vector field  $V$ along
$V$ along  $\eta$ such that
$\eta$ such that  $D_{\dot{\eta}}V \equiv 0$,
$D_{\dot{\eta}}V \equiv 0$,  $L(V)$ is constant (see, e.g., [Reference Ohta38, Proposition 6.5] in the positive definite case). In particular, all tangent spaces are mutually linearly isometric.
$L(V)$ is constant (see, e.g., [Reference Ohta38, Proposition 6.5] in the positive definite case). In particular, all tangent spaces are mutually linearly isometric.
Remark 2.4. (Metrizability)
In the positive definite case, Szabó showed that a Finsler manifold of Berwald type  $(M,F)$ admits a Riemannian metric
$(M,F)$ admits a Riemannian metric  $h$ whose Levi-Civita connection coincides with the Chern connection of
$h$ whose Levi-Civita connection coincides with the Chern connection of  $F$, i.e., the Christoffel symbols of
$F$, i.e., the Christoffel symbols of  $h$ coincide with
$h$ coincide with  $\Gamma^i_{jk}$ of
$\Gamma^i_{jk}$ of  $F$ (see [Reference Szabó41], [Reference Bao, Chern and Shen3, Exercise 10.1.4]). This is called the (Riemannian) metrizability theorem. It is not known whether the metrizability can be generalized to Berwald spacetimes. In [Reference Fuster, Heefer, Pfeifer and Voicu18], some counterexamples were constructed for Lorentz–Finsler structures defined only on a subset of
$F$ (see [Reference Szabó41], [Reference Bao, Chern and Shen3, Exercise 10.1.4]). This is called the (Riemannian) metrizability theorem. It is not known whether the metrizability can be generalized to Berwald spacetimes. In [Reference Fuster, Heefer, Pfeifer and Voicu18], some counterexamples were constructed for Lorentz–Finsler structures defined only on a subset of  $TM$. Their discussion is not applicable to Lorentz–Finsler structures defined on the entire tangent bundle as in Definition 2.1.
$TM$. Their discussion is not applicable to Lorentz–Finsler structures defined on the entire tangent bundle as in Definition 2.1.
The geodesic equation is  $D^{\dot{\eta}}_{\dot{\eta}}\dot{\eta} \equiv 0$. Then, the exponential map is defined in the same way as the Riemannian (or Finsler) case. For
$D^{\dot{\eta}}_{\dot{\eta}}\dot{\eta} \equiv 0$. Then, the exponential map is defined in the same way as the Riemannian (or Finsler) case. For  $C^1$-vector fields
$C^1$-vector fields  $V,W$ along a nonconstant geodesic
$V,W$ along a nonconstant geodesic  $\eta$, we have
$\eta$, we have
 \begin{equation}
\frac{\mathrm{d}}{\mathrm{d} t}\bigl[ g_{\dot{\eta}}(V,W) \bigr]
=g_{\dot{\eta}}(D^{\dot{\eta}}_{\dot{\eta}}V,W) +g_{\dot{\eta}}(V,D^{\dot{\eta}}_{\dot{\eta}}W).
\end{equation}
\begin{equation}
\frac{\mathrm{d}}{\mathrm{d} t}\bigl[ g_{\dot{\eta}}(V,W) \bigr]
=g_{\dot{\eta}}(D^{\dot{\eta}}_{\dot{\eta}}V,W) +g_{\dot{\eta}}(V,D^{\dot{\eta}}_{\dot{\eta}}W).
\end{equation} Moreover, for  $C^1$-vector fields
$C^1$-vector fields  $V,W$ along a
$V,W$ along a  $C^1$-curve
$C^1$-curve  $\eta$ such that
$\eta$ such that  $V$ is nowhere vanishing,
$V$ is nowhere vanishing,
 \begin{equation}
\frac{\mathrm{d}}{\mathrm{d} t}\bigl[ g_V(V,W) \bigr] =g_V(D^V_{\dot{\eta}}V,W) +g_V(V,D^V_{\dot{\eta}}W)
\end{equation}
\begin{equation}
\frac{\mathrm{d}}{\mathrm{d} t}\bigl[ g_V(V,W) \bigr] =g_V(D^V_{\dot{\eta}}V,W) +g_V(V,D^V_{\dot{\eta}}W)
\end{equation}(see, e.g., [Reference Lu, Minguzzi and Ohta29, (3.1), (3.2)], [Reference Ohta38, Lemmas 4.8, 4.9]).
A  $C^{\infty}$-vector field
$C^{\infty}$-vector field  $J$ along a geodesic
$J$ along a geodesic  $\eta$ is called a Jacobi field if it satisfies the Jacobi equation
$\eta$ is called a Jacobi field if it satisfies the Jacobi equation  $D^{\dot{\eta}}_{\dot{\eta}} D^{\dot{\eta}}_{\dot{\eta}} J +R_{\dot{\eta}}(J) =0$, where
$D^{\dot{\eta}}_{\dot{\eta}} D^{\dot{\eta}}_{\dot{\eta}} J +R_{\dot{\eta}}(J) =0$, where
 \begin{equation*} R_v(w):=\sum_{i,j=1}^n R^i_j(v) w^j \frac{\partial}{\partial x^i} \bigg|_x \end{equation*}
\begin{equation*} R_v(w):=\sum_{i,j=1}^n R^i_j(v) w^j \frac{\partial}{\partial x^i} \bigg|_x \end{equation*}for  $v,w \in T_xM$ and
$v,w \in T_xM$ and
 \begin{equation*} R^i_j(v) :=\frac{\partial G^i}{\partial x^j}(v) -\sum_{k=1}^n \biggl\{\frac{\partial N^i_j}{\partial x^k}(v) v^k -\frac{\partial N^i_j}{\partial v^k}(v) G^k(v) +N^i_k(v) N^k_j(v) \biggr\} \end{equation*}
\begin{equation*} R^i_j(v) :=\frac{\partial G^i}{\partial x^j}(v) -\sum_{k=1}^n \biggl\{\frac{\partial N^i_j}{\partial x^k}(v) v^k -\frac{\partial N^i_j}{\partial v^k}(v) G^k(v) +N^i_k(v) N^k_j(v) \biggr\} \end{equation*}is the curvature tensor. A Jacobi field is also characterized as the variational vector field of a geodesic variation. One can further expand this as  $R^i_j(v)=\sum_{k,l=1}^n R^i_{ljk}(v)v^k v^l$, where
$R^i_j(v)=\sum_{k,l=1}^n R^i_{ljk}(v)v^k v^l$, where
 \begin{equation*} R^i_{ljk}
:=\Biggl( \frac{\partial\Gamma^i_{kl}}{\partial x^j} -\sum_{m=1}^n N^m_j \frac{\partial\Gamma^i_{kl}}{\partial v^m} \Biggr) -\Biggl(\frac{\partial\Gamma^i_{jl}}{\partial x^k} -\sum_{m=1}^n N^m_k \frac{\partial\Gamma^i_{jl}}{\partial v^m} \Biggr) +\sum_{m=1}^n(\Gamma^i_{jm} \Gamma^m_{kl} -\Gamma^i_{km} \Gamma^m_{jl}) \end{equation*}
\begin{equation*} R^i_{ljk}
:=\Biggl( \frac{\partial\Gamma^i_{kl}}{\partial x^j} -\sum_{m=1}^n N^m_j \frac{\partial\Gamma^i_{kl}}{\partial v^m} \Biggr) -\Biggl(\frac{\partial\Gamma^i_{jl}}{\partial x^k} -\sum_{m=1}^n N^m_k \frac{\partial\Gamma^i_{jl}}{\partial v^m} \Biggr) +\sum_{m=1}^n(\Gamma^i_{jm} \Gamma^m_{kl} -\Gamma^i_{km} \Gamma^m_{jl}) \end{equation*}(see [Reference Bao, Chern and Shen3, (3.3.2)], [Reference Ohta38, (5.10)] in the positive definite setting).
For  $v \in \Omega_x$ and
$v \in \Omega_x$ and  $w \in T_xM$ linearly independent of
$w \in T_xM$ linearly independent of  $v$, define the flag curvature of the
$v$, define the flag curvature of the  $2$-plane (flag)
$2$-plane (flag)  $v \wedge w$ with flagpole
$v \wedge w$ with flagpole  $v$ as
$v$ as
 \begin{equation*} \mathbf{K}(v,w) :=\frac{g_v(R_v(w),w)}{g_v(v,v) g_v(w,w) -g_v(v,w)^2}. \end{equation*}
\begin{equation*} \mathbf{K}(v,w) :=\frac{g_v(R_v(w),w)}{g_v(v,v) g_v(w,w) -g_v(v,w)^2}. \end{equation*} Note that the denominator is negative (by the reverse Cauchy–Schwarz inequality for  $g_v$ as in (3.3) below for linearly independent vectors). We say that the timelike flag curvature is nonnegative or
$g_v$ as in (3.3) below for linearly independent vectors). We say that the timelike flag curvature is nonnegative or  $\mathbf{K} \ge 0$ holds in timelike directions if
$\mathbf{K} \ge 0$ holds in timelike directions if  $\mathbf{K}(v,w) \ge 0$ for all
$\mathbf{K}(v,w) \ge 0$ for all  $v$ and
$v$ and  $w$ as above.
$w$ as above.
Remark 2.5. (Sign of
$\mathbf{K}$)

The sign of  $\mathbf{K}$ (in timelike directions) above is the same as [Reference Beem, Ehrlich and Easley5, Reference Beran, Kunzinger, Ohanyan and Rott6] and opposite to [Reference Lu, Minguzzi and Ohta29]. Thus, the nonnegative flag curvature
$\mathbf{K}$ (in timelike directions) above is the same as [Reference Beem, Ehrlich and Easley5, Reference Beran, Kunzinger, Ohanyan and Rott6] and opposite to [Reference Lu, Minguzzi and Ohta29]. Thus, the nonnegative flag curvature  $\mathbf{K} \ge 0$ in timelike directions corresponds to the nonpositive timelike curvature in the sense of [Reference Alexander and Bishop1, Reference Beran, Kunzinger and Rott.7, Reference Kunzinger and Sämann26] (cf. [Reference Kunzinger and Sämann26, Example 4.9], [Reference Beran, Kunzinger, Ohanyan and Rott6, Remark 2.2]). The mismatch between nonnegativity and nonpositivity is due to the signature chosen to ensure compatibility with most works in the nonsmooth Lorentzian setting, e.g., [Reference Beran, Kunzinger, Ohanyan and Rott6, Reference Beran, Kunzinger and Rott.7, Reference Kunzinger and Sämann26]. Note also that
$\mathbf{K} \ge 0$ in timelike directions corresponds to the nonpositive timelike curvature in the sense of [Reference Alexander and Bishop1, Reference Beran, Kunzinger and Rott.7, Reference Kunzinger and Sämann26] (cf. [Reference Kunzinger and Sämann26, Example 4.9], [Reference Beran, Kunzinger, Ohanyan and Rott6, Remark 2.2]). The mismatch between nonnegativity and nonpositivity is due to the signature chosen to ensure compatibility with most works in the nonsmooth Lorentzian setting, e.g., [Reference Beran, Kunzinger, Ohanyan and Rott6, Reference Beran, Kunzinger and Rott.7, Reference Kunzinger and Sämann26]. Note also that  $\mathbf{K} \ge 0$ holds in timelike directions for the de Sitter space (Lorentzian pseudo-sphere) and product spacetimes
$\mathbf{K} \ge 0$ holds in timelike directions for the de Sitter space (Lorentzian pseudo-sphere) and product spacetimes  $(\mathbf R \times N, -\mathrm{d} t^2 +h)$ where
$(\mathbf R \times N, -\mathrm{d} t^2 +h)$ where  $(N,h)$ is an Hadamard manifold.
$(N,h)$ is an Hadamard manifold.
2.2. Causality conditions and geodesics
Given  $x,y \in M$, we write
$x,y \in M$, we write  $x \ll y$ (resp.
$x \ll y$ (resp.  $x \lt y$) if there is a timelike (resp. causal) curve from
$x \lt y$) if there is a timelike (resp. causal) curve from  $x$ to
$x$ to  $y$, and
$y$, and  $x \le y$ means that
$x \le y$ means that  $x=y$ or
$x=y$ or  $x \lt y$. Then, we define the chronological past and future of
$x \lt y$. Then, we define the chronological past and future of  $x$ by
$x$ by
 \begin{equation*} I^-(x):=\{y \in M \,|\, y \ll x\}, \qquad I^+(x):=\{y \in M \,|\, x \ll y\}, \end{equation*}
\begin{equation*} I^-(x):=\{y \in M \,|\, y \ll x\}, \qquad I^+(x):=\{y \in M \,|\, x \ll y\}, \end{equation*}and the causal past and future of  $x$ by
$x$ by
 \begin{equation*} J^-(x):=\{y \in M \,|\, y \le x\}, \qquad J^+(x):=\{y \in M \,|\, x \le y\}. \end{equation*}
\begin{equation*} J^-(x):=\{y \in M \,|\, y \le x\}, \qquad J^+(x):=\{y \in M \,|\, x \le y\}. \end{equation*}Definition 2.6. (Causality conditions)
Let  $(M,L)$ be a Finsler spacetime.
$(M,L)$ be a Finsler spacetime.
(1)
$(M,L)$ is said to be chronological if
$x \notin I^+(x)$ for all
$x\in M$.(2) We say that
$(M,L)$ is causal if there is no closed causal curve.(3)
$(M,L)$ is said to be strongly causal if, for all
$x \in M$, every neighbourhood
$U$ of
$x$ contains another neighbourhood
$V$ of
$x$ such that no causal curve between points in
$V$ leaves
$V$. In particular, the topology contains a basis of causally convex sets.(4) We say that
$(M,L)$ is globally hyperbolic if it is strongly causal and, for any
$x,y \in M$,
$J^+(x) \cap J^-(y)$ is compact.







Define the time separation (also called the Lorentz–Finsler distance)  $\tau(x,y)$ for
$\tau(x,y)$ for  $x,y \in M$ by
$x,y \in M$ by
 \begin{equation*} \tau(x,y) :=\sup_{\eta} \mathbf{L}(\eta), \qquad
\mathbf{L}(\eta) :=\int_0^1 F\bigl( \dot{\eta}(t) \bigr) \,\mathrm{d} t, \end{equation*}
\begin{equation*} \tau(x,y) :=\sup_{\eta} \mathbf{L}(\eta), \qquad
\mathbf{L}(\eta) :=\int_0^1 F\bigl( \dot{\eta}(t) \bigr) \,\mathrm{d} t, \end{equation*}where the supremum is taken over all (piecewise  $C^1$) causal curves
$C^1$) causal curves  $\eta\colon [0,1] \longrightarrow M$ from
$\eta\colon [0,1] \longrightarrow M$ from  $x$ to
$x$ to  $y$. We set
$y$. We set  $\tau(x,y):=0$ if
$\tau(x,y):=0$ if  $x \not\le y$. A curve
$x \not\le y$. A curve  $\eta$ attaining the above supremum is said to be maximizing. In general,
$\eta$ attaining the above supremum is said to be maximizing. In general,  $\tau$ is only lower semi-continuous and can be infinite (see, e.g., [Reference Minguzzi34, Proposition 6.7]). In globally hyperbolic Finsler spacetimes,
$\tau$ is only lower semi-continuous and can be infinite (see, e.g., [Reference Minguzzi34, Proposition 6.7]). In globally hyperbolic Finsler spacetimes,  $\tau$ is finite and continuous, and any pair of points
$\tau$ is finite and continuous, and any pair of points  $x,y \in M$ with
$x,y \in M$ with  $x \lt y$ admits a maximizing geodesic from
$x \lt y$ admits a maximizing geodesic from  $x$ to
$x$ to  $y$ (Avez–Seifert theorem; see [Reference Minguzzi34, Propositions 6.8, 6.9]).
$y$ (Avez–Seifert theorem; see [Reference Minguzzi34, Propositions 6.8, 6.9]).
3. Concavity of Berwald spacetimes
Let  $(M,L)$ be a Finsler spacetime. For each
$(M,L)$ be a Finsler spacetime. For each  $x \in M$, there exists a convex normal neighbourhood
$x \in M$, there exists a convex normal neighbourhood  $U \subset M$ of
$U \subset M$ of  $x$ in the sense that, for every
$x$ in the sense that, for every  $y \in U$, the exponential map
$y \in U$, the exponential map  $\exp_y$ gives a
$\exp_y$ gives a  $C^1$-diffeomorphism from an open star-shaped set
$C^1$-diffeomorphism from an open star-shaped set  $\mathcal{U}_y \subset T_yM$ onto
$\mathcal{U}_y \subset T_yM$ onto  $U$ (see [Reference Minguzzi33, Theorem 4]). In particular, for any
$U$ (see [Reference Minguzzi33, Theorem 4]). In particular, for any  $y,z \in U$, there is a unique geodesic from
$y,z \in U$, there is a unique geodesic from  $y$ to
$y$ to  $z$ contained in
$z$ contained in  $U$. In this and the following sections, since we shall deal only with local structures (governed by curvature), we are concerned with causal relations and the time separation restricted to
$U$. In this and the following sections, since we shall deal only with local structures (governed by curvature), we are concerned with causal relations and the time separation restricted to  $U$. They coincide with the global ones if
$U$. They coincide with the global ones if  $(M,L)$ is strongly causal (by taking smaller
$(M,L)$ is strongly causal (by taking smaller  $U$ if necessary).
$U$ if necessary).
The following is a Lorentzian analogue to the convexity of metric spaces (also called the Busemann nonpositive curvature; recall the introduction), inspired by [Reference Beran, Kunzinger and Rott.7, Reference Erös and Gieger16].
Definition 3.1. (Concavity)
Let  $(M,L)$ be a Finsler spacetime.
$(M,L)$ be a Finsler spacetime.
(1) We say that
$(M,L)$ is locally timelike concave if every
$x \in M$ admits a convex normal neighbourhood
$U$ such that, for any timelike geodesics
$\eta,\xi\colon [0,1] \longrightarrow U$ with
$\eta(t) \ll_U \xi(t)$ or
$\eta(t)=\xi(t)$ at
$t=0,1$, we have
for all
\begin{equation*} \tau_U \bigl( \eta(t),\xi(t) \bigr) \ge (1-t)\tau_U \bigl( \eta(0),\xi(0) \bigr) +t\tau_U \bigl( \eta(1),\xi(1) \bigr) \end{equation*}
$t \in [0,1]$.(2) We say that
$(M,L)$ is locally concave if every
$x \in M$ admits a convex normal neighbourhood
$U$ such that, for any geodesics
$\eta,\xi\colon [0,1] \longrightarrow U$ with
$\eta(t) \ll_U \xi(t)$ or
$\eta(t) = \xi(t)$ at
$t=0,1$, we have
for all
\begin{equation*} \tau_U \bigl( \eta(t),\xi(t) \bigr) \ge (1-t)\tau_U \bigl( \eta(0),\xi(0) \bigr) +t\tau_U \bigl( \eta(1),\xi(1) \bigr) \end{equation*}
$t \in [0,1]$.








Here, we denote by  $\ll_U$ and
$\ll_U$ and  $\tau_U$, respectively, the timelike relation and time separation on
$\tau_U$, respectively, the timelike relation and time separation on  $(U,L|_U)$.
$(U,L|_U)$.
Note that we allow mixed cases in Definition 3.1, i.e.,  $\eta(0) \ll_U \xi(0)$ and
$\eta(0) \ll_U \xi(0)$ and  $\eta(1)=\xi(1)$ (or vice versa).
$\eta(1)=\xi(1)$ (or vice versa).
Remark 3.2. (Causal character of geodesics)
Note that  $\eta,\xi$ in (2) above are not necessarily causal, and that local concavity clearly implies local timelike concavity. It was proved in [Reference Beran, Kunzinger and Rott.7, Proposition 6.1] that a Lorentzian pre-length space of timelike nonpositive curvature in the sense of strict causal triangle comparison is locally timelike concave (recall Remark 2.5 for the sign convention in timelike curvature bounds). In such a synthetic setting, it is natural to consider only timelike geodesics, since we do not know how to define spacelike geodesics. Then, in [Reference Erös and Gieger16, Definition 2.1], local timelike concavity as in (1) above is termed local concavity. For Berwald spacetimes, we will see that local timelike concavity and local concavity are, in fact, equivalent.
$\eta,\xi$ in (2) above are not necessarily causal, and that local concavity clearly implies local timelike concavity. It was proved in [Reference Beran, Kunzinger and Rott.7, Proposition 6.1] that a Lorentzian pre-length space of timelike nonpositive curvature in the sense of strict causal triangle comparison is locally timelike concave (recall Remark 2.5 for the sign convention in timelike curvature bounds). In such a synthetic setting, it is natural to consider only timelike geodesics, since we do not know how to define spacelike geodesics. Then, in [Reference Erös and Gieger16, Definition 2.1], local timelike concavity as in (1) above is termed local concavity. For Berwald spacetimes, we will see that local timelike concavity and local concavity are, in fact, equivalent.
To show the local concavity from  $\mathbf{K} \ge 0$, we can apply a similar calculation to the positive definite case (cf. [Reference Kristály, Varga and Kozma25], [Reference Ohta38, Theorem 8.30]), while causality needs to be addressed. Concerning the next proposition, a related result in the Lorentzian case can be found in [Reference Beem, Ehrlich and Easley5, Proposition 11.15(1)] (we will need an additional discussion relying on the Berwald condition to deal with the difference between
$\mathbf{K} \ge 0$, we can apply a similar calculation to the positive definite case (cf. [Reference Kristály, Varga and Kozma25], [Reference Ohta38, Theorem 8.30]), while causality needs to be addressed. Concerning the next proposition, a related result in the Lorentzian case can be found in [Reference Beem, Ehrlich and Easley5, Proposition 11.15(1)] (we will need an additional discussion relying on the Berwald condition to deal with the difference between  $\mathbf{K}(T,V)$ and
$\mathbf{K}(T,V)$ and  $\mathbf{K}(V,T)$).
$\mathbf{K}(V,T)$).
Proposition 3.3. (Concave norm)
Let  $(M,L)$ be a Berwald spacetime of nonnegative flag curvature
$(M,L)$ be a Berwald spacetime of nonnegative flag curvature  $\mathbf{K} \ge 0$ in timelike directions. If
$\mathbf{K} \ge 0$ in timelike directions. If  $\sigma \colon [0,1] \times (-\varepsilon,\varepsilon) \longrightarrow U$ is a variation in a convex normal neighbourhood
$\sigma \colon [0,1] \times (-\varepsilon,\varepsilon) \longrightarrow U$ is a variation in a convex normal neighbourhood  $U$ such that
$U$ such that  $\sigma_s(t):=\sigma(t,s)$ is a geodesic for each
$\sigma_s(t):=\sigma(t,s)$ is a geodesic for each  $s \in (-\varepsilon,\varepsilon)$ and that
$s \in (-\varepsilon,\varepsilon)$ and that  $V(t,s):=\partial_s\sigma(t,s)$ is timelike for all
$V(t,s):=\partial_s\sigma(t,s)$ is timelike for all  $(t,s)$, then, for every
$(t,s)$, then, for every  $s$, the function
$s$, the function  $t\longmapsto F(V(t,s))$ is concave.
$t\longmapsto F(V(t,s))$ is concave.
Proof. Put  $T(t,s):=\partial_t \sigma(t,s)$. Observe from (2.2) and (2.5) that
$T(t,s):=\partial_t \sigma(t,s)$. Observe from (2.2) and (2.5) that
 \begin{equation*} \frac{\partial^2 [F^2(V)]}{\partial t^2} =-\frac{\partial^2 [g_V(V,V)]}{\partial t^2}
=-2g_V (V,D_T D_T V) -2g_V(D_T V,D_T V) \end{equation*}
\begin{equation*} \frac{\partial^2 [F^2(V)]}{\partial t^2} =-\frac{\partial^2 [g_V(V,V)]}{\partial t^2}
=-2g_V (V,D_T D_T V) -2g_V(D_T V,D_T V) \end{equation*} (recall that we can omit reference vectors in Berwald spacetimes). Since  $V(\cdot,s)$ is a Jacobi field by the hypothesis for
$V(\cdot,s)$ is a Jacobi field by the hypothesis for  $\sigma$, we find
$\sigma$, we find
 \begin{equation}
g_V(V,D_T D_T V) =-g_V \bigl( V,R_T(V) \bigr)
=-g_V \Biggl( V,\sum_{i,j,k,l=1}^n R^i_{ljk}(T) V^j T^k T^l \frac{\partial}{\partial x^i} \Biggr).
\end{equation}
\begin{equation}
g_V(V,D_T D_T V) =-g_V \bigl( V,R_T(V) \bigr)
=-g_V \Biggl( V,\sum_{i,j,k,l=1}^n R^i_{ljk}(T) V^j T^k T^l \frac{\partial}{\partial x^i} \Biggr).
\end{equation} Note that  $R^i_{ljk}(T)=R^i_{ljk}(V)$ by the Berwald condition, and that
$R^i_{ljk}(T)=R^i_{ljk}(V)$ by the Berwald condition, and that
 \begin{equation}
\begin{split}
g_V\Biggl( V,\sum_{i,j,k,l=1}^n R^i_{ljk}(V) V^j T^k T^l \frac{\partial}{\partial x^i} \Biggr)
&= g_V\bigl( R_V(T),T \bigr) \\
&= \mathbf{K}(V,T) \bigl\{g_V(V,V) g_V(T,T) -g_V(V,T)^2 \bigr\},
\end{split}
\end{equation}
\begin{equation}
\begin{split}
g_V\Biggl( V,\sum_{i,j,k,l=1}^n R^i_{ljk}(V) V^j T^k T^l \frac{\partial}{\partial x^i} \Biggr)
&= g_V\bigl( R_V(T),T \bigr) \\
&= \mathbf{K}(V,T) \bigl\{g_V(V,V) g_V(T,T) -g_V(V,T)^2 \bigr\},
\end{split}
\end{equation}where the first equation follows from [Reference Ohta38, Lemma 5.15(iv)] (which is valid regardless of the signature of metrics).
Now,  $\mathbf{K}(V,T) \ge 0$ by hypothesis and, choosing a local chart
$\mathbf{K}(V,T) \ge 0$ by hypothesis and, choosing a local chart  $(x^i)_{i=1}^n$ which is
$(x^i)_{i=1}^n$ which is  $g_V$-orthonormal with
$g_V$-orthonormal with  $\partial/\partial x^1=V/F(V)$, we observe
$\partial/\partial x^1=V/F(V)$, we observe
 \begin{equation}
F^2(V) g_V(T,T) +g_V(V,T)^2
=V_1^2 \Biggl( -T_1^2 +\sum_{i=2}^n T_i^2 \Biggr) +(V_1 T_1)^2 \ge 0.
\end{equation}
\begin{equation}
F^2(V) g_V(T,T) +g_V(V,T)^2
=V_1^2 \Biggl( -T_1^2 +\sum_{i=2}^n T_i^2 \Biggr) +(V_1 T_1)^2 \ge 0.
\end{equation}Hence, we obtain
 \begin{equation}
\begin{split}
\frac{\partial^2 [F(V)]}{\partial t^2}
& = \frac{1}{2F(V)} \frac{\partial^2 [F^2(V)]}{\partial t^2}
-\frac{1}{F(V)} \biggl( \frac{\partial [F(V)]}{\partial t} \biggr)^2 \\
& \le -\frac{g_V(D_T V,D_T V)}{F(V)}
-\frac{1}{F(V)} \biggl( \frac{g_V(V,D_T V)}{F(V)} \biggr)^2 \\
& = - \frac{1}{F^3(V)}
\Bigl\{F^2(V) g_V(D_T V,D_T V) +g_V(V,D_T V)^2 \Bigr\}.
\end{split}
\end{equation}
\begin{equation}
\begin{split}
\frac{\partial^2 [F(V)]}{\partial t^2}
& = \frac{1}{2F(V)} \frac{\partial^2 [F^2(V)]}{\partial t^2}
-\frac{1}{F(V)} \biggl( \frac{\partial [F(V)]}{\partial t} \biggr)^2 \\
& \le -\frac{g_V(D_T V,D_T V)}{F(V)}
-\frac{1}{F(V)} \biggl( \frac{g_V(V,D_T V)}{F(V)} \biggr)^2 \\
& = - \frac{1}{F^3(V)}
\Bigl\{F^2(V) g_V(D_T V,D_T V) +g_V(V,D_T V)^2 \Bigr\}.
\end{split}
\end{equation} Since  $F^2(V) g_V(D_T V,D_T V) +g_V(V,D_T V)^2 \ge 0$ by (3.3), this implies that
$F^2(V) g_V(D_T V,D_T V) +g_V(V,D_T V)^2 \ge 0$ by (3.3), this implies that  $\partial^2[F(V)]/\partial t^2 \le 0$. Therefore,
$\partial^2[F(V)]/\partial t^2 \le 0$. Therefore,  $F(V(t,s))$ is concave in
$F(V(t,s))$ is concave in  $t$.
$t$.
The following two lemmas are concerned with the causality issue.
Lemma 3.4 (Timelike homotopy)
Let  $U$ be a convex normal neighbourhood in a Finsler spacetime
$U$ be a convex normal neighbourhood in a Finsler spacetime  $(M,L)$. Then, for any timelike curves
$(M,L)$. Then, for any timelike curves  $\alpha,\beta \colon [0,1] \longrightarrow U$, there exists a homotopy
$\alpha,\beta \colon [0,1] \longrightarrow U$, there exists a homotopy  $h\colon [0,1] \times [0,1] \longrightarrow U$ such that
$h\colon [0,1] \times [0,1] \longrightarrow U$ such that  $h(0;s)=\alpha(s)$,
$h(0;s)=\alpha(s)$,  $h(1;s)=\beta(s)$ and
$h(1;s)=\beta(s)$ and  $s \longmapsto h(t;s)$ is timelike for each
$s \longmapsto h(t;s)$ is timelike for each  $t$, and that
$t$, and that  $h$ and
$h$ and  $\partial_s h$ are continuous.
$\partial_s h$ are continuous.
Proof. Put  $x=\alpha(0)$,
$x=\alpha(0)$,  $y=\beta(0)$ and let
$y=\beta(0)$ and let  $\eta\colon [0,1] \longrightarrow U$ be the geodesic from
$\eta\colon [0,1] \longrightarrow U$ be the geodesic from  $x$ to
$x$ to  $y$. Consider a smooth timelike vector field
$y$. Consider a smooth timelike vector field  $X$ that exists by time orientation and, replacing it with
$X$ that exists by time orientation and, replacing it with  $cX$ for small
$cX$ for small  $c \gt 0$ if necessary, we assume that
$c \gt 0$ if necessary, we assume that  $\exp_{\eta(t)}(sX(\eta(t))) \in U$ for all
$\exp_{\eta(t)}(sX(\eta(t))) \in U$ for all  $t,s\in[0,1]$.
$t,s\in[0,1]$.
We first choose a homotopy  $h_1$ from
$h_1$ from  $\alpha$ to the geodesic from
$\alpha$ to the geodesic from  $x$ to
$x$ to  $\alpha(\varepsilon)$ for small
$\alpha(\varepsilon)$ for small  $\varepsilon \gt 0$, and take
$\varepsilon \gt 0$, and take  $v \in \Omega_x$ with
$v \in \Omega_x$ with  $\alpha(\varepsilon)=\exp_x(v)$. Then, set
$\alpha(\varepsilon)=\exp_x(v)$. Then, set
 \begin{equation*} h_2(t;s):=\exp_x \Bigl( s\bigl( (1-t)v+tX(x) \bigr) \Bigr),\quad
h_3(t;s):=\exp_{\eta(t)}\Bigl( sX\bigr( \eta(t) \bigr) \Bigr) \end{equation*}
\begin{equation*} h_2(t;s):=\exp_x \Bigl( s\bigl( (1-t)v+tX(x) \bigr) \Bigr),\quad
h_3(t;s):=\exp_{\eta(t)}\Bigl( sX\bigr( \eta(t) \bigr) \Bigr) \end{equation*}for  $t,s \in [0,1]$. Concatenating
$t,s \in [0,1]$. Concatenating  $h_1$,
$h_1$,  $h_2$, and
$h_2$, and  $h_3$, and connecting
$h_3$, and connecting  $h_3(1;s)=\exp_y(sX(y))$ and
$h_3(1;s)=\exp_y(sX(y))$ and  $\beta$ in the same way, we obtain a homotopy that satisfies the desired property.
$\beta$ in the same way, we obtain a homotopy that satisfies the desired property.
Lemma 3.5 (Timelike variation)
Let  $(M,L)$ be a Berwald spacetime of nonnegative flag curvature
$(M,L)$ be a Berwald spacetime of nonnegative flag curvature  $\mathbf{K} \ge 0$ in timelike directions, and
$\mathbf{K} \ge 0$ in timelike directions, and  $U \subset M$ be a convex normal neighbourhood. Given timelike curves
$U \subset M$ be a convex normal neighbourhood. Given timelike curves  $\alpha,\beta\colon [0,1] \longrightarrow U$, let
$\alpha,\beta\colon [0,1] \longrightarrow U$, let  $t\longmapsto \sigma(t,s)$ be the geodesic from
$t\longmapsto \sigma(t,s)$ be the geodesic from  $\alpha(s)$ to
$\alpha(s)$ to  $\beta(s)$ in
$\beta(s)$ in  $U$. Then,
$U$. Then,  $\partial_s \sigma$ is timelike and
$\partial_s \sigma$ is timelike and  $t \longmapsto F(\partial_s \sigma(t,s))$ is concave for each
$t \longmapsto F(\partial_s \sigma(t,s))$ is concave for each  $s \in [0,1]$.
$s \in [0,1]$.
Proof. Let  $h(\lambda;s)$ be a homotopy between
$h(\lambda;s)$ be a homotopy between  $\alpha$ and
$\alpha$ and  $\beta$ given by Lemma 3.4, i.e.,
$\beta$ given by Lemma 3.4, i.e.,  $h(0;s)=\alpha(s)$,
$h(0;s)=\alpha(s)$,  $h(1;s)=\beta(s)$ and
$h(1;s)=\beta(s)$ and  $\partial_s h$ is always timelike. For each
$\partial_s h$ is always timelike. For each  $\lambda \in [0,1]$, we consider the variation
$\lambda \in [0,1]$, we consider the variation  $\Xi(\lambda;\cdot,\cdot) \colon [0,1] \times [0,1] \longrightarrow U$ such that
$\Xi(\lambda;\cdot,\cdot) \colon [0,1] \times [0,1] \longrightarrow U$ such that  $t \longmapsto \Xi(\lambda;t,s)$ is the geodesic from
$t \longmapsto \Xi(\lambda;t,s)$ is the geodesic from  $\Xi(\lambda;0,s):=h(\lambda;s)$ to
$\Xi(\lambda;0,s):=h(\lambda;s)$ to  $\Xi(\lambda;1,s):=\beta(s)$ in
$\Xi(\lambda;1,s):=\beta(s)$ in  $U$. Observe that
$U$. Observe that  $\Xi(0;t,s)=\sigma(t,s)$ and
$\Xi(0;t,s)=\sigma(t,s)$ and  $\Xi(1;t,s)= \beta(s)$.
$\Xi(1;t,s)= \beta(s)$.
Now, we set
 \begin{equation*}\lambda_0\operatorname{:=}\operatorname{sup}\{\lambda\in\lbrack0,1\rbrack\mid\partial_s\mathrm\Xi(\lambda;t,s) \ \text{is not timelike for some }t,s\in\lbrack0,1\rbrack\}.\end{equation*}
\begin{equation*}\lambda_0\operatorname{:=}\operatorname{sup}\{\lambda\in\lbrack0,1\rbrack\mid\partial_s\mathrm\Xi(\lambda;t,s) \ \text{is not timelike for some }t,s\in\lbrack0,1\rbrack\}.\end{equation*} Note that  $\lambda_0 \lt 1$, since
$\lambda_0 \lt 1$, since  $\partial_s\Xi(1;t,s)=\dot\beta(s)$ is timelike and being timelike is an open condition. Then, for any
$\partial_s\Xi(1;t,s)=\dot\beta(s)$ is timelike and being timelike is an open condition. Then, for any  $\lambda \in (\lambda_0,1]$, since
$\lambda \in (\lambda_0,1]$, since  $\partial_s \Xi(\lambda;t,s)$ is timelike for all
$\partial_s \Xi(\lambda;t,s)$ is timelike for all  $t,s \in [0,1]$, it follows from Proposition 3.3 that
$t,s \in [0,1]$, it follows from Proposition 3.3 that  $F(\partial_s \Xi(\lambda;t,s))$ is concave in
$F(\partial_s \Xi(\lambda;t,s))$ is concave in  $t$. Taking the limit as
$t$. Taking the limit as  $\lambda \to \lambda_0$, we find that
$\lambda \to \lambda_0$, we find that  $F(\partial_s \Xi(\lambda_0;t,s))$ is concave in
$F(\partial_s \Xi(\lambda_0;t,s))$ is concave in  $t$. Hence,
$t$. Hence,
 \begin{align*}
F\bigl( \partial_s \Xi(\lambda_0;t,s) \bigr)
&\ge (1-t)F\bigl( \partial_s \Xi(\lambda_0;0,s) \bigr) +tF\bigl( \partial_s \Xi(\lambda_0;1,s)\bigr) \\
&= (1-t)F\bigl( \partial_s h(\lambda_0;s)\bigr) +tF\bigl( \dot{\beta}(s) \bigr) \gt 0
\end{align*}
\begin{align*}
F\bigl( \partial_s \Xi(\lambda_0;t,s) \bigr)
&\ge (1-t)F\bigl( \partial_s \Xi(\lambda_0;0,s) \bigr) +tF\bigl( \partial_s \Xi(\lambda_0;1,s)\bigr) \\
&= (1-t)F\bigl( \partial_s h(\lambda_0;s)\bigr) +tF\bigl( \dot{\beta}(s) \bigr) \gt 0
\end{align*}for all  $t,s \in [0,1]$. This shows that
$t,s \in [0,1]$. This shows that  $\partial_s\Xi(\lambda_0;t,s)$ is also timelike for all
$\partial_s\Xi(\lambda_0;t,s)$ is also timelike for all  $t,s \in [0,1]$.
$t,s \in [0,1]$.
If  $\lambda_0 \gt 0$, then we deduce from the openness of being a timelike vector that
$\lambda_0 \gt 0$, then we deduce from the openness of being a timelike vector that  $\partial_s\Xi(\lambda;t,s)$ is timelike for all
$\partial_s\Xi(\lambda;t,s)$ is timelike for all  $t,s \in [0,1]$ and
$t,s \in [0,1]$ and  $\lambda \in (\lambda_0-\varepsilon,1]$ for sufficiently small
$\lambda \in (\lambda_0-\varepsilon,1]$ for sufficiently small  $\varepsilon \gt 0$, contradicting the definition of
$\varepsilon \gt 0$, contradicting the definition of  $\lambda_0$. Consequently,
$\lambda_0$. Consequently,  $\partial_s\Xi(\lambda;t,s)$ is timelike for all
$\partial_s\Xi(\lambda;t,s)$ is timelike for all  $\lambda,t,s \in [0,1]$. Taking
$\lambda,t,s \in [0,1]$. Taking  $\lambda=0$ implies that
$\lambda=0$ implies that  $\partial_s \sigma$ is timelike, and
$\partial_s \sigma$ is timelike, and  $F(\partial_s \sigma(t,s))=F(\partial_s \Xi(0;t,s))$ is concave in
$F(\partial_s \sigma(t,s))=F(\partial_s \Xi(0;t,s))$ is concave in  $t$.
$t$.
We are ready to prove (I)  $\Rightarrow$ (II) in Theorem 1.1.
$\Rightarrow$ (II) in Theorem 1.1.
Theorem 3.6 (
$\mathbf{K} \ge 0$ implies concavity)
Let  $(M,L)$ be a Berwald spacetime of nonnegative flag curvature
$(M,L)$ be a Berwald spacetime of nonnegative flag curvature  $\mathbf{K} \ge 0$ in timelike directions. Then,
$\mathbf{K} \ge 0$ in timelike directions. Then,  $(M,L)$ is locally concave.
$(M,L)$ is locally concave.
Proof. Let  $U \subset M$ be a convex normal neighbourhood. We first consider geodesics
$U \subset M$ be a convex normal neighbourhood. We first consider geodesics  $\eta,\xi\colon [0,1] \longrightarrow U$ with
$\eta,\xi\colon [0,1] \longrightarrow U$ with  $\eta(0) \ll_U \xi(0)$ and
$\eta(0) \ll_U \xi(0)$ and  $\eta(1) \ll_U \xi(1)$. Then, take the geodesics
$\eta(1) \ll_U \xi(1)$. Then, take the geodesics  $\alpha$ from
$\alpha$ from  $\eta(0)$ to
$\eta(0)$ to  $\xi(0)$ and
$\xi(0)$ and  $\beta$ from
$\beta$ from  $\eta(1)$ to
$\eta(1)$ to  $\xi(1)$, and let
$\xi(1)$, and let  $\sigma\colon [0,1] \times [0,1] \longrightarrow U$ be the variation such that
$\sigma\colon [0,1] \times [0,1] \longrightarrow U$ be the variation such that  $\sigma(0,s)=\alpha(s)$,
$\sigma(0,s)=\alpha(s)$,  $\sigma(1,s)=\beta(s)$, and that
$\sigma(1,s)=\beta(s)$, and that  $t \longmapsto \sigma(t,s)$ is the geodesic from
$t \longmapsto \sigma(t,s)$ is the geodesic from  $\alpha(s)$ to
$\alpha(s)$ to  $\beta(s)$. Then, it follows from Lemma 3.5 that
$\beta(s)$. Then, it follows from Lemma 3.5 that  $\partial_s \sigma$ is timelike and
$\partial_s \sigma$ is timelike and  $F(\partial_s \sigma(t,s))$ is concave in
$F(\partial_s \sigma(t,s))$ is concave in  $t$. This implies that
$t$. This implies that
 \begin{equation*} \mathbf{L}(t):=\int_0^1 F\bigl( \partial_s \sigma(t,s) \bigr) \,\mathrm{d} s \end{equation*}
\begin{equation*} \mathbf{L}(t):=\int_0^1 F\bigl( \partial_s \sigma(t,s) \bigr) \,\mathrm{d} s \end{equation*}is concave, and hence
 \begin{equation*} \tau_U \bigl( \eta(t),\xi(t) \bigr) \geq \mathbf{L}(t)
\geq (1-t)\mathbf{L}(0) + t\mathbf{L}(1)
=(1-t)\tau_U \bigl( \eta(0),\xi(0) \bigr) + t\tau_U \bigl( \eta(1),\xi(1) \bigr), \end{equation*}
\begin{equation*} \tau_U \bigl( \eta(t),\xi(t) \bigr) \geq \mathbf{L}(t)
\geq (1-t)\mathbf{L}(0) + t\mathbf{L}(1)
=(1-t)\tau_U \bigl( \eta(0),\xi(0) \bigr) + t\tau_U \bigl( \eta(1),\xi(1) \bigr), \end{equation*}as desired.
The case of  $\eta(0)=\xi(0)$ or
$\eta(0)=\xi(0)$ or  $\eta(1)=\xi(1)$ is obtained as the limit, thanks to the continuity of geodesics in their endpoints (in
$\eta(1)=\xi(1)$ is obtained as the limit, thanks to the continuity of geodesics in their endpoints (in  $U$).
$U$).
The converse implication (from concavity to the Berwald condition and  $\mathbf{K} \ge 0$) was established in the positive definite case in [Reference Ivanov and Lytchak21]; however, their argument cannot apply to the Lorentzian setting (see Subsection 5.1 for more details). Here we consider a weaker result in the spirit of [Reference Kristály and Kozma24], putting the Berwald condition in the assumption. To this end, we need another preliminary lemma.
$\mathbf{K} \ge 0$) was established in the positive definite case in [Reference Ivanov and Lytchak21]; however, their argument cannot apply to the Lorentzian setting (see Subsection 5.1 for more details). Here we consider a weaker result in the spirit of [Reference Kristály and Kozma24], putting the Berwald condition in the assumption. To this end, we need another preliminary lemma.
Lemma 3.7 (Concavity yields concave norm)
Let  $J$ be a timelike Jacobi field along a timelike geodesic
$J$ be a timelike Jacobi field along a timelike geodesic  $\eta\colon [0,\delta] \longrightarrow U$ in a convex normal neighbourhood
$\eta\colon [0,\delta] \longrightarrow U$ in a convex normal neighbourhood  $U \subset M$. If
$U \subset M$. If  $\tau$ is timelike concave in
$\tau$ is timelike concave in  $U$
$U$  $($in the sense of Definition
$($in the sense of Definition  $3.1)$, then
$3.1)$, then  $t \longmapsto F(J(t))$ is concave. Similarly, if
$t \longmapsto F(J(t))$ is concave. Similarly, if  $\tau$ is concave in
$\tau$ is concave in  $U$, then
$U$, then  $F(J)$ is concave for every timelike Jacobi field
$F(J)$ is concave for every timelike Jacobi field  $J$ along any geodesic
$J$ along any geodesic  $\eta$ in
$\eta$ in  $U$.
$U$.
Proof. Let  $\sigma\colon [0,\delta] \times (-\varepsilon,\varepsilon) \longrightarrow U$ be any geodesic variation associated with
$\sigma\colon [0,\delta] \times (-\varepsilon,\varepsilon) \longrightarrow U$ be any geodesic variation associated with  $J$, i.e.,
$J$, i.e.,  $\sigma_s:=\sigma(\cdot,s)$ is a geodesic for every
$\sigma_s:=\sigma(\cdot,s)$ is a geodesic for every  $s$,
$s$,  $\sigma_0=\eta$, and
$\sigma_0=\eta$, and  $\partial_s \sigma(t,0)=J(t)$ for all
$\partial_s \sigma(t,0)=J(t)$ for all  $t$. Note that
$t$. Note that  $\sigma_s$ is timelike for
$\sigma_s$ is timelike for  $s$ close to
$s$ close to  $0$. Moreover, since
$0$. Moreover, since  $J(t)$ is timelike,
$J(t)$ is timelike,  $t \longmapsto \tau_U(\eta(t),\sigma_s(t))$ is concave for small
$t \longmapsto \tau_U(\eta(t),\sigma_s(t))$ is concave for small  $s \gt 0$ by timelike concavity. Then, the concavity of
$s \gt 0$ by timelike concavity. Then, the concavity of  $t \longmapsto F(J(t))$ follows from
$t \longmapsto F(J(t))$ follows from
 \begin{equation*} \lim_{s \downarrow 0} \frac{\tau_U(\eta(t),\sigma_s(t))}{s} =F\bigl( J(t) \bigr). \end{equation*}
\begin{equation*} \lim_{s \downarrow 0} \frac{\tau_U(\eta(t),\sigma_s(t))}{s} =F\bigl( J(t) \bigr). \end{equation*}The latter assertion is shown in the same way.
The next theorem shows (III)  $\Rightarrow$ (I) in Theorem 1.1.
$\Rightarrow$ (I) in Theorem 1.1.
Theorem 3.8 (Timelike concavity implies
$\mathbf{K} \ge 0$)
Let  $(M,L)$ be a Berwald spacetime. If
$(M,L)$ be a Berwald spacetime. If  $(M,L)$ is locally timelike concave, then we have
$(M,L)$ is locally timelike concave, then we have  $\mathbf{K} \ge 0$ in timelike directions.
$\mathbf{K} \ge 0$ in timelike directions.
Proof. Suppose to the contrary that  $g_v(R_v(w),w) \gt 0$ holds for some linearly independent timelike vectors
$g_v(R_v(w),w) \gt 0$ holds for some linearly independent timelike vectors  $v, w \in \Omega_x$. Let
$v, w \in \Omega_x$. Let  $\eta\colon [0,\delta] \longrightarrow M$ be the geodesic with
$\eta\colon [0,\delta] \longrightarrow M$ be the geodesic with  $\dot{\eta}(0) = w$ and
$\dot{\eta}(0) = w$ and  $J$ be the Jacobi field along
$J$ be the Jacobi field along  $\eta$ with
$\eta$ with  $J(0) = v$ and
$J(0) = v$ and  $D_{\dot{\eta}} J(0) =0$. Then, we have
$D_{\dot{\eta}} J(0) =0$. Then, we have
 \begin{equation*} D_{\dot{\eta}} D_{\dot{\eta}} J(0) =-R_w(v) \end{equation*}
\begin{equation*} D_{\dot{\eta}} D_{\dot{\eta}} J(0) =-R_w(v) \end{equation*}and, by (2.5),
 \begin{equation*} \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ L\bigl( J(t) \bigr) \Bigr]_{t=0}
= \frac{1}{2} \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g_J\bigl( J(t),J(t) \bigr) \Bigr]_{t=0}
= g_v \bigl( v,D_{\dot{\eta}} J(0) \bigr) =0. \end{equation*}
\begin{equation*} \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ L\bigl( J(t) \bigr) \Bigr]_{t=0}
= \frac{1}{2} \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g_J\bigl( J(t),J(t) \bigr) \Bigr]_{t=0}
= g_v \bigl( v,D_{\dot{\eta}} J(0) \bigr) =0. \end{equation*} Combining these and recalling  $F=\sqrt{-2L}$, we obtain
$F=\sqrt{-2L}$, we obtain
 \begin{align*}
\frac{\mathrm{d}^2}{\mathrm{d} t^2}\Bigl[ F\bigl( J(t) \bigr) \Bigr]_{t=0}
&= -\frac{\mathrm{d}}{\mathrm{d} t} \Biggl[ \frac{1}{\sqrt{-2L(J(t))}} \cdot \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ L\bigl( J(t) \bigr) \Bigr] \Biggr]_{t=0} \\
&= -\frac{1}{F(v)} \cdot \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g_J \bigl( J(t),D_{\dot{\eta}} J(t) \bigr) \Bigr]_{t=0} \\
&= \frac{1}{F(v)} \cdot g_v \bigl( v,R_w(v) \bigr).
\end{align*}
\begin{align*}
\frac{\mathrm{d}^2}{\mathrm{d} t^2}\Bigl[ F\bigl( J(t) \bigr) \Bigr]_{t=0}
&= -\frac{\mathrm{d}}{\mathrm{d} t} \Biggl[ \frac{1}{\sqrt{-2L(J(t))}} \cdot \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ L\bigl( J(t) \bigr) \Bigr] \Biggr]_{t=0} \\
&= -\frac{1}{F(v)} \cdot \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g_J \bigl( J(t),D_{\dot{\eta}} J(t) \bigr) \Bigr]_{t=0} \\
&= \frac{1}{F(v)} \cdot g_v \bigl( v,R_w(v) \bigr).
\end{align*}However, as we saw in (3.1) and (3.2), the Berwald condition ensures that
 \begin{equation*} g_v \bigl( v,R_w(v) \bigr) =g_v \bigl( R_v(w),w \bigr) \gt 0. \end{equation*}
\begin{equation*} g_v \bigl( v,R_w(v) \bigr) =g_v \bigl( R_v(w),w \bigr) \gt 0. \end{equation*}This contradicts Lemma 3.7, and completes the proof.
Remark 3.9. (Globalization)
(a) In the case of metric spaces, Busemann’s convexity is known to enjoy the globalization property (called the Cartan–Hadamard theorem): If a complete, connected metric space
$(X,d)$ is locally convex, then its universal cover
$\widetilde{X}$ with its induced length metric is globally convex (see [Reference Bridson and Haefliger11, Theorem II.4.1(1)] and the references therein). In particular, if
$(X,d)$ is itself a simply connected length space, then it is globally convex.(b) In the Lorentzian setting, an analogous statement was proved in [Reference Erös and Gieger16, Theorem 4.9]: If a globally hyperbolic, regular Lorentzian length space
$X$ is locally concave and future one-connected, then it is globally concave. Here, global hyperbolicity replaces the metric completeness assumption, and future one-connectedness refers to the requirement that
$X$ be timelike path-connected and any pair of future-directed timelike curves with common endpoints be homotopic through a family of timelike curves. Recall from Remark 3.2 that concavity in [Reference Erös and Gieger16] means timelike concavity in the sense of Definition 3.1.



4. Convex capsules
We next consider another kind of characterization of the concavity condition for Berwald spacetimes. Inspired by [Reference Kristály and Kozma24], we introduce the following.
Definition 4.1. (Convex capsules)
A Finsler spacetime  $(M,L)$ is said to have convex future capsules if, for every
$(M,L)$ is said to have convex future capsules if, for every  $x \in M$, there exists a convex normal neighbourhood
$x \in M$, there exists a convex normal neighbourhood  $U_x$ of
$U_x$ of  $x$ and
$x$ and  $r \gt 0$ such that the set
$r \gt 0$ such that the set
 \begin{equation*} K_{\geq r}^+(\gamma) :=\bigcup_{y \in \gamma} H_{\geq r}^+(y) \end{equation*}
\begin{equation*} K_{\geq r}^+(\gamma) :=\bigcup_{y \in \gamma} H_{\geq r}^+(y) \end{equation*}is geodesically convex for any geodesic  $\gamma$ contained in
$\gamma$ contained in  $U_x$, where
$U_x$, where
 \begin{equation*} H_{\geq r}^+(y):=\{z \in U_x \mid \tau_{U_x}(y,z) \geq r\}. \end{equation*}
\begin{equation*} H_{\geq r}^+(y):=\{z \in U_x \mid \tau_{U_x}(y,z) \geq r\}. \end{equation*}To have convex past capsules is defined in the same way with
 \begin{equation*} K_{\geq r}^-(\gamma) :=\bigcup_{y \in \gamma} H_{\geq r}^-(y), \qquad
H_{\geq r}^-(y):=\{z \in U_x \mid \tau_{U_x}(z,y) \geq r\}. \end{equation*}
\begin{equation*} K_{\geq r}^-(\gamma) :=\bigcup_{y \in \gamma} H_{\geq r}^-(y), \qquad
H_{\geq r}^-(y):=\{z \in U_x \mid \tau_{U_x}(z,y) \geq r\}. \end{equation*} In [Reference Kristály and Kozma24, Definition 3], they considered the convexity of a neighbourhood of a short geodesic in a metric space, whose shape indeed resembles a capsule. In our definition,  $K_{\ge r}^\pm (\gamma)$ does not look like a capsule (see Figure 1), but we keep the name and notation to make the correspondence with [Reference Kristály and Kozma24] transparent.
$K_{\ge r}^\pm (\gamma)$ does not look like a capsule (see Figure 1), but we keep the name and notation to make the correspondence with [Reference Kristály and Kozma24] transparent.
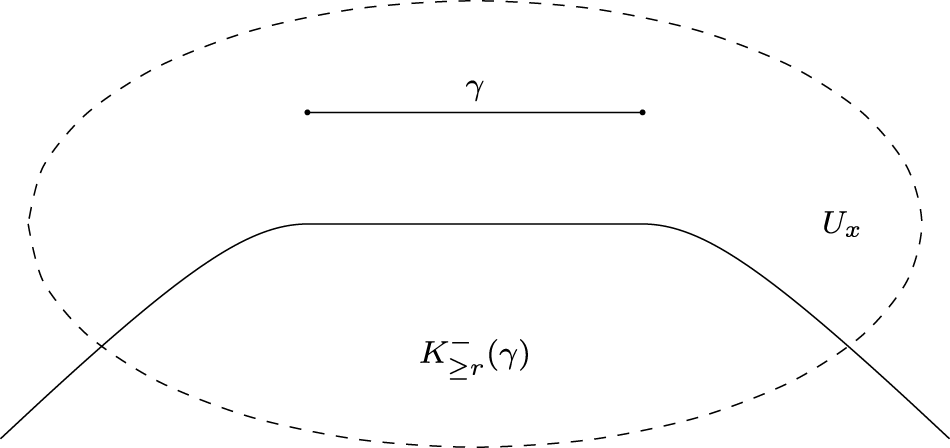
Figure 1. The convex past capsule associated to a geodesic  $\gamma$.
$\gamma$.
Proposition 4.2. (Concavity implies convex capsules)
If a Berwald spacetime  $(M,L)$ is locally concave, then it has convex future and past capsules.
$(M,L)$ is locally concave, then it has convex future and past capsules.
Proof. Given  $x \in M$, let
$x \in M$, let  $U$ be a convex normal neighbourhood of
$U$ be a convex normal neighbourhood of  $x$ and
$x$ and  $\gamma$ be any geodesic in
$\gamma$ be any geodesic in  $U$. Take
$U$. Take  $z_1,z_2\in K:=K_{\geq r}^+(\gamma)\subset U$ and let
$z_1,z_2\in K:=K_{\geq r}^+(\gamma)\subset U$ and let  $\alpha:\lbrack0,1\rbrack\longrightarrow U$ be the geodesic from
$\alpha:\lbrack0,1\rbrack\longrightarrow U$ be the geodesic from  $z_1$ to
$z_1$ to  $z_2$. Since
$z_2$. Since  $z_1,z_2 \in K$, we find
$z_1,z_2 \in K$, we find  $t_1,t_2 \in [0,1]$ such that
$t_1,t_2 \in [0,1]$ such that  $\tau_U(\gamma(t_1),z_1) \geq r$ and
$\tau_U(\gamma(t_1),z_1) \geq r$ and  $\tau_U(\gamma(t_2),z_2) \geq r$. If
$\tau_U(\gamma(t_2),z_2) \geq r$. If  $t_1 \le t_2$, then, we infer from the assumed concavity that, for any
$t_1 \le t_2$, then, we infer from the assumed concavity that, for any  $s \in [0,1]$,
$s \in [0,1]$,
 \begin{equation*}\tau_U(\gamma((1-s) \ t_1+st_2),\alpha(s))\geq(1-s) \ \tau_U(\gamma(t_1),z_1)+s\tau_U(\gamma(t_2),z_2)\geq r.\end{equation*}
\begin{equation*}\tau_U(\gamma((1-s) \ t_1+st_2),\alpha(s))\geq(1-s) \ \tau_U(\gamma(t_1),z_1)+s\tau_U(\gamma(t_2),z_2)\geq r.\end{equation*} This shows that  $\alpha(s) \in K$. If
$\alpha(s) \in K$. If  $t_2 \lt t_1$, then we observe from the Berwald condition that the reversal of
$t_2 \lt t_1$, then we observe from the Berwald condition that the reversal of  $\gamma|_{[t_2,t_1]}$ is still a geodesic from
$\gamma|_{[t_2,t_1]}$ is still a geodesic from  $\gamma(t_1)$ to
$\gamma(t_1)$ to  $\gamma(t_2)$ and the above argument shows
$\gamma(t_2)$ and the above argument shows  $\alpha(s)\in K$. This completes the proof for the future case.
$\alpha(s)\in K$. This completes the proof for the future case.
We can see that concavity implies convex past capsules in the same way.
In the converse implication, we can roughly follow the argument in [Reference Kristály and Kozma24] ((e)  $\Rightarrow$ (a) of Theorem 1).
$\Rightarrow$ (a) of Theorem 1).
Proposition 4.3. (Convex capsules imply
$\mathbf{K} \ge 0$)
Let  $(M,L)$ be a Berwald spacetime having convex future capsules. Then, we have
$(M,L)$ be a Berwald spacetime having convex future capsules. Then, we have  $\mathbf{K} \ge 0$ in timelike directions. Similarly, if
$\mathbf{K} \ge 0$ in timelike directions. Similarly, if  $(M,L)$ is a Berwald spacetime having convex past capsules, then
$(M,L)$ is a Berwald spacetime having convex past capsules, then  $\mathbf{K} \ge 0$ in timelike directions.
$\mathbf{K} \ge 0$ in timelike directions.
Proof. Let  $x \in M$. It is sufficient to show
$x \in M$. It is sufficient to show  $\mathbf{K}(v,w) \ge 0$ for any
$\mathbf{K}(v,w) \ge 0$ for any  $v \in \Omega_x$ and
$v \in \Omega_x$ and  $w \in T_xM$ satisfying
$w \in T_xM$ satisfying  $F(v)=1$,
$F(v)=1$,  $g_v(v,w)=0$ and
$g_v(v,w)=0$ and  $g_v(w,w)=1$. For small
$g_v(w,w)=1$. For small  $r \gt 0$, let
$r \gt 0$, let  $\eta\colon [0,r] \longrightarrow U_x$ be the geodesic with
$\eta\colon [0,r] \longrightarrow U_x$ be the geodesic with  $\dot{\eta}(0)=v$ and
$\dot{\eta}(0)=v$ and  $W$ be the vector field along
$W$ be the vector field along  $\eta$ such that
$\eta$ such that  $W(0)=w$ and
$W(0)=w$ and  $D_{\dot{\eta}}W \equiv 0$. (Recall that we can drop reference vectors in Berwald spacetimes.) It follows from (2.4) or (2.5) that
$D_{\dot{\eta}}W \equiv 0$. (Recall that we can drop reference vectors in Berwald spacetimes.) It follows from (2.4) or (2.5) that
 \begin{equation*}
\frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g_{\dot{\eta}}(\dot{\eta},W) \Bigr] =g_{\dot{\eta}}(D_{\dot{\eta}} \dot{\eta},W) +g_{\dot{\eta}}(\dot{\eta},D_{\dot{\eta}} W)=0.
\end{equation*}
\begin{equation*}
\frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g_{\dot{\eta}}(\dot{\eta},W) \Bigr] =g_{\dot{\eta}}(D_{\dot{\eta}} \dot{\eta},W) +g_{\dot{\eta}}(\dot{\eta},D_{\dot{\eta}} W)=0.
\end{equation*} Hence,  $g_{\dot{\eta}}(\dot{\eta}(t),W(t))=0$ holds for all
$g_{\dot{\eta}}(\dot{\eta}(t),W(t))=0$ holds for all  $t \in [0,r]$.
$t \in [0,r]$.
Consider the variation  $\sigma\colon [0,r] \times (-\varepsilon,\varepsilon) \longrightarrow U_x$ such that
$\sigma\colon [0,r] \times (-\varepsilon,\varepsilon) \longrightarrow U_x$ such that  $\sigma_t(s):=\sigma(t,s)$ is the geodesic with
$\sigma_t(s):=\sigma(t,s)$ is the geodesic with  $\dot{\sigma}_t(0)=W(t)$, and define
$\dot{\sigma}_t(0)=W(t)$, and define  $T:=\partial_t \sigma$ and
$T:=\partial_t \sigma$ and  $V:=\partial_s \sigma$ (thus
$V:=\partial_s \sigma$ (thus  $V(t,0)=W(t)$). Note that
$V(t,0)=W(t)$). Note that  $\sigma_r$ is tangent to
$\sigma_r$ is tangent to  $H_{\ge r}^+(x)$ at
$H_{\ge r}^+(x)$ at  $\eta(r)$ by
$\eta(r)$ by  $g_{\dot{\eta}}(\dot{\eta}(r),W(r))=0$ (see Figure 2). Moreover, we deduce from
$g_{\dot{\eta}}(\dot{\eta}(r),W(r))=0$ (see Figure 2). Moreover, we deduce from  $g_{\dot{\eta}}(\dot{\eta},W) \equiv 0$ and the first variation formula for
$g_{\dot{\eta}}(\dot{\eta},W) \equiv 0$ and the first variation formula for  $\mathbf{L}(s):=\int_0^r F(T(t,s)) \,\mathrm{d} t$ (see [Reference Braun and Ohta10, Lemma 2.6]) that
$\mathbf{L}(s):=\int_0^r F(T(t,s)) \,\mathrm{d} t$ (see [Reference Braun and Ohta10, Lemma 2.6]) that  $\mathbf{L}'(0)=0$ and
$\mathbf{L}'(0)=0$ and  $\eta(t) \not\in K$ for
$\eta(t) \not\in K$ for  $t \in [0,r)$, where
$t \in [0,r)$, where
 \begin{equation*} K:=K_{\ge r}^+(\sigma_0)
=\bigcup_{s \in (-\varepsilon,\varepsilon)}H_{\ge r}^+\bigl( \sigma_0(s) \bigr). \end{equation*}
\begin{equation*} K:=K_{\ge r}^+(\sigma_0)
=\bigcup_{s \in (-\varepsilon,\varepsilon)}H_{\ge r}^+\bigl( \sigma_0(s) \bigr). \end{equation*} Since  $K$ is a geodesically convex set (by hypothesis) including
$K$ is a geodesically convex set (by hypothesis) including  $H_{\ge r}^+(x)$, we infer that
$H_{\ge r}^+(x)$, we infer that  $\sigma_r$ is also tangent to
$\sigma_r$ is also tangent to  $K$. This implies that, by the convexity of
$K$. This implies that, by the convexity of  $K$,
$K$,  $\sigma_r$ does not enter the interior of
$\sigma_r$ does not enter the interior of  $K$. In particular,
$K$. In particular,  $\sigma_r(s)$ is not in the interior of
$\sigma_r(s)$ is not in the interior of  $H_{\ge r}^+(\sigma_0(s))$. Hence,
$H_{\ge r}^+(\sigma_0(s))$. Hence,
 \begin{equation*} \mathbf{L}(s) \le \tau_{U_x}\bigl( \sigma_0(s),\sigma_r(s) \bigr) \le r. \end{equation*}
\begin{equation*} \mathbf{L}(s) \le \tau_{U_x}\bigl( \sigma_0(s),\sigma_r(s) \bigr) \le r. \end{equation*} Combining this with 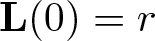 $\mathbf{L}(0)=r$ and
$\mathbf{L}(0)=r$ and  $\mathbf{L}'(0)=0$, we obtain
$\mathbf{L}'(0)=0$, we obtain  $\mathbf{L}''(0) \le 0$.
$\mathbf{L}''(0) \le 0$.
Figure 2. The geodesic variation  $\sigma$ and a tangent hyperbola.
$\sigma$ and a tangent hyperbola.
For each  $t \in [0,r]$,
$t \in [0,r]$,  $s \longmapsto T(t,s)$ is a Jacobi field along
$s \longmapsto T(t,s)$ is a Jacobi field along  $\sigma_t$ by construction. Thus, we find that
$\sigma_t$ by construction. Thus, we find that
 \begin{equation*} \frac{\partial^2 [F^2(T)]}{\partial s^2}\Big|_{s=0}
= 2g_{\dot{\eta}} \bigl( \dot{\eta},R_W(\dot{\eta}) \bigr) -2g_{\dot{\eta}}(D_W T,D_W T) \end{equation*}
\begin{equation*} \frac{\partial^2 [F^2(T)]}{\partial s^2}\Big|_{s=0}
= 2g_{\dot{\eta}} \bigl( \dot{\eta},R_W(\dot{\eta}) \bigr) -2g_{\dot{\eta}}(D_W T,D_W T) \end{equation*} (recall  $V(t,0)=W(t)$). In the first term, by (3.1), (3.2) and
$V(t,0)=W(t)$). In the first term, by (3.1), (3.2) and  $D_{\dot{\eta}}W \equiv 0$, we infer that
$D_{\dot{\eta}}W \equiv 0$, we infer that
 \begin{equation*} g_{\dot{\eta}} \bigl( \dot{\eta},R_W(\dot{\eta}) \bigr)
=\mathbf{K}(\dot{\eta},W) \bigl\{g_{\dot{\eta}}(\dot{\eta},\dot{\eta}) g_{\dot{\eta}}(W,W) -g_{\dot{\eta}}(\dot{\eta},W)^2 \bigr\}
=-\mathbf{K}(\dot{\eta},W). \end{equation*}
\begin{equation*} g_{\dot{\eta}} \bigl( \dot{\eta},R_W(\dot{\eta}) \bigr)
=\mathbf{K}(\dot{\eta},W) \bigl\{g_{\dot{\eta}}(\dot{\eta},\dot{\eta}) g_{\dot{\eta}}(W,W) -g_{\dot{\eta}}(\dot{\eta},W)^2 \bigr\}
=-\mathbf{K}(\dot{\eta},W). \end{equation*}As to the second term, we have
 \begin{equation*} D_V T(t,0) =D_T V(t,0) =D_{\dot{\eta}} W(t) =0. \end{equation*}
\begin{equation*} D_V T(t,0) =D_T V(t,0) =D_{\dot{\eta}} W(t) =0. \end{equation*} Hence, by a similar calculation to (3.4) (using  $F(\dot{\eta}) \equiv 1$), we obtain
$F(\dot{\eta}) \equiv 1$), we obtain
 \begin{align*}
\mathbf{L}''(0) &= \int_0^r \biggl\{\frac{1}{2} \frac{\partial^2 [F^2(T)]}{\partial s^2}\Big|_{s=0}
-\biggl( \frac{\partial [F(T)]}{\partial s} \Big|_{s=0} \biggr)^2 \biggr\} \,\mathrm{d} t \\
&=-\int_0^r \bigl\{ \mathbf{K}(\dot{\eta},W)
+g_{\dot{\eta}}(\dot{\eta},D_W T)^2 \bigr\} \,\mathrm{d} t \\
&=-\int_0^r \mathbf{K}(\dot{\eta},W) \,\mathrm{d} t.
\end{align*}
\begin{align*}
\mathbf{L}''(0) &= \int_0^r \biggl\{\frac{1}{2} \frac{\partial^2 [F^2(T)]}{\partial s^2}\Big|_{s=0}
-\biggl( \frac{\partial [F(T)]}{\partial s} \Big|_{s=0} \biggr)^2 \biggr\} \,\mathrm{d} t \\
&=-\int_0^r \bigl\{ \mathbf{K}(\dot{\eta},W)
+g_{\dot{\eta}}(\dot{\eta},D_W T)^2 \bigr\} \,\mathrm{d} t \\
&=-\int_0^r \mathbf{K}(\dot{\eta},W) \,\mathrm{d} t.
\end{align*} Since  $\mathbf{K}$ is continuous, letting
$\mathbf{K}$ is continuous, letting  $r \to 0$ yields
$r \to 0$ yields  $\mathbf{K}(v,w) \geq 0$.
$\mathbf{K}(v,w) \geq 0$.
The case of convex past capsules is shown in the same way, using the geodesic  $\eta\colon [-r,0] \longrightarrow U_x$ with
$\eta\colon [-r,0] \longrightarrow U_x$ with  $\dot{\eta}(0)=v$. Alternatively, we can reduce the past case for
$\dot{\eta}(0)=v$. Alternatively, we can reduce the past case for  $L$ to the future case with respect to the reverse Lorentz–Finsler structure
$L$ to the future case with respect to the reverse Lorentz–Finsler structure  $\overline{L}(v):=L(-v)$, for the curvature bound
$\overline{L}(v):=L(-v)$, for the curvature bound  $\mathbf{K} \ge 0$ (in timelike directions) for
$\mathbf{K} \ge 0$ (in timelike directions) for  $L$ is equivalent to that for
$L$ is equivalent to that for  $\overline{L}$ (cf. [Reference Lu, Minguzzi and Ohta29, Remark 8.14], [Reference Ohta38, §2.5]).
$\overline{L}$ (cf. [Reference Lu, Minguzzi and Ohta29, Remark 8.14], [Reference Ohta38, §2.5]).
Remark 4.4. (Spacelike geodesics)
Note that, by construction,  $\dot{\sigma}_t(0)=W(t)$ is spacelike with respect to
$\dot{\sigma}_t(0)=W(t)$ is spacelike with respect to  $g_{\dot{\eta}(t)}$. This is the reason why we introduced not only local timelike concavity but also local concavity in Definition 3.1, although it is desirable to deal only with causal curves. In fact, for spacelike geodesics, nothing can be said about their maximality or minimality; thus, it is not known how to consider spacelike geodesics in the synthetic setting like [Reference Beran, Kunzinger and Rott.7, Reference Erös and Gieger16, Reference Kunzinger and Sämann26].
$g_{\dot{\eta}(t)}$. This is the reason why we introduced not only local timelike concavity but also local concavity in Definition 3.1, although it is desirable to deal only with causal curves. In fact, for spacelike geodesics, nothing can be said about their maximality or minimality; thus, it is not known how to consider spacelike geodesics in the synthetic setting like [Reference Beran, Kunzinger and Rott.7, Reference Erös and Gieger16, Reference Kunzinger and Sämann26].
The proof of Theorem 1.1 is now complete: (I)  $\Rightarrow$ (II) by Theorem 3.6, (II)
$\Rightarrow$ (II) by Theorem 3.6, (II)  $\Rightarrow$ (III) is obvious, (III)
$\Rightarrow$ (III) is obvious, (III)  $\Rightarrow$ (I) by Theorem 3.8, (II)
$\Rightarrow$ (I) by Theorem 3.8, (II)  $\Rightarrow$ (IV) and (V) by Proposition 4.2, (IV) or (V)
$\Rightarrow$ (IV) and (V) by Proposition 4.2, (IV) or (V)  $\Rightarrow$ (I) by Proposition 4.3.
$\Rightarrow$ (I) by Proposition 4.3.
5. Further problems
This section is devoted to discussions on some remaining open problems.
5.1. From concavity to the Berwald condition
In this subsection, we consider general (non-Berwald) Finsler spacetimes and explain difficulties in following the argument in [Reference Ivanov and Lytchak21] in the positive definite case. Notice that Lemma 3.1 and Proposition 4.1 in [Reference Ivanov and Lytchak21] can be generalized as follows.
Lemma 5.1 (cf. [Reference Ivanov and Lytchak21, Lemma 3.1])
Let  $(M,L)$ be a locally concave Finsler spacetime. Then, for every parallel vector field
$(M,L)$ be a locally concave Finsler spacetime. Then, for every parallel vector field  $V$ along any nonconstant geodesic
$V$ along any nonconstant geodesic  $\eta\colon [0,1] \longrightarrow M$ with
$\eta\colon [0,1] \longrightarrow M$ with  $V(0) \in \Omega_{\eta(0)}$
$V(0) \in \Omega_{\eta(0)}$  $($i.e.,
$($i.e.,  $D^{\dot{\eta}}_{\dot{\eta}}V \equiv 0)$,
$D^{\dot{\eta}}_{\dot{\eta}}V \equiv 0)$,  $L(V)$ is constant. In particular,
$L(V)$ is constant. In particular,  $V(t) \in \Omega_{\eta(t)}$ for all
$V(t) \in \Omega_{\eta(t)}$ for all  $t \in [0,1]$.
$t \in [0,1]$.
Proof. Let  $J$ be the Jacobi field along
$J$ be the Jacobi field along  $\eta$ with
$\eta$ with  $J(0)=0$ and
$J(0)=0$ and  $D_{\dot{\eta}}^{\dot{\eta}} J(0)=V(0)$. Observe that
$D_{\dot{\eta}}^{\dot{\eta}} J(0)=V(0)$. Observe that
 \begin{equation*} D_{\dot{\eta}}^{\dot{\eta}} D_{\dot{\eta}}^{\dot{\eta}} J(0) =-R_{\dot{\eta}}(0) =0. \end{equation*}
\begin{equation*} D_{\dot{\eta}}^{\dot{\eta}} D_{\dot{\eta}}^{\dot{\eta}} J(0) =-R_{\dot{\eta}}(0) =0. \end{equation*} Comparing this with  $D_{\dot{\eta}}^{\dot{\eta}}[tV(t)] = V(t)$ and
$D_{\dot{\eta}}^{\dot{\eta}}[tV(t)] = V(t)$ and  $D_{\dot{\eta}}^{\dot{\eta}} D_{\dot{\eta}}^{\dot{\eta}} [tV(t)]=0$, we find
$D_{\dot{\eta}}^{\dot{\eta}} D_{\dot{\eta}}^{\dot{\eta}} [tV(t)]=0$, we find  $J(t) =tV(t) +O(t^3)$. It follows that
$J(t) =tV(t) +O(t^3)$. It follows that
 \begin{equation*} F\bigl( J(t) \bigr) =tF\bigl( V(t) \bigr) +O(t^3) \quad \text{as}\ t \to 0. \end{equation*}
\begin{equation*} F\bigl( J(t) \bigr) =tF\bigl( V(t) \bigr) +O(t^3) \quad \text{as}\ t \to 0. \end{equation*} Combining this with the concavity of  $t \longmapsto F(J(t))$ by Lemma 3.7, we obtain
$t \longmapsto F(J(t))$ by Lemma 3.7, we obtain  $F(J(t)) \le tF(V(0))$. Hence, we have
$F(J(t)) \le tF(V(0))$. Hence, we have
 \begin{equation*} F\bigl( V(t) \bigr) =\frac{1}{t} F\bigl( J(t) \bigr) +O(t^2) \le F\bigl( V(0) \bigr) +O(t^2). \end{equation*}
\begin{equation*} F\bigl( V(t) \bigr) =\frac{1}{t} F\bigl( J(t) \bigr) +O(t^2) \le F\bigl( V(0) \bigr) +O(t^2). \end{equation*}This implies
 \begin{equation*} \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ F\bigl( V(t) \bigr) \Bigr]_{t=0} \le 0, \end{equation*}
\begin{equation*} \frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ F\bigl( V(t) \bigr) \Bigr]_{t=0} \le 0, \end{equation*}and similarly  $\frac{\mathrm{d}}{\mathrm{d} t}[F(V(t))] \le 0$ for all
$\frac{\mathrm{d}}{\mathrm{d} t}[F(V(t))] \le 0$ for all  $t \in (0,1)$ such that
$t \in (0,1)$ such that  $V(t)$ is timelike.
$V(t)$ is timelike.
The same argument for the reverse Lorentz–Finsler structure  $\overline{L}(v):=L(-v)$ shows that
$\overline{L}(v):=L(-v)$ shows that  $\frac{\mathrm{d}}{\mathrm{d} t}[F(V(t))] \ge 0$ for all
$\frac{\mathrm{d}}{\mathrm{d} t}[F(V(t))] \ge 0$ for all  $t \in (0,1]$ such that
$t \in (0,1]$ such that  $V(t)$ is timelike. Indeed,
$V(t)$ is timelike. Indeed,  $\bar{\eta}(t):=\eta(1-t)$ is a geodesic for
$\bar{\eta}(t):=\eta(1-t)$ is a geodesic for  $\overline{L}$ and
$\overline{L}$ and  $\frac{\mathrm{d}}{\mathrm{d} t}[\overline{F}(-V(t))] \ge 0$ follows with
$\frac{\mathrm{d}}{\mathrm{d} t}[\overline{F}(-V(t))] \ge 0$ follows with
 \begin{equation*} \overline{F}(-V):=\sqrt{-2\overline{L}(-V)}=F(V). \end{equation*}
\begin{equation*} \overline{F}(-V):=\sqrt{-2\overline{L}(-V)}=F(V). \end{equation*} Therefore,  $F(V(t))$ is constant and
$F(V(t))$ is constant and  $V(t)$ is timelike for all
$V(t)$ is timelike for all  $t \in [0,1]$.
$t \in [0,1]$.
Proposition 5.2. (cf. [Reference Ivanov and Lytchak21, Proposition 4.1])
Let  $(M,L)$ be a Finsler spacetime, and suppose that there is a Lorentzian metric
$(M,L)$ be a Finsler spacetime, and suppose that there is a Lorentzian metric  $g$ on
$g$ on  $M$ which is preserved by every parallel transport along any geodesic. Then,
$M$ which is preserved by every parallel transport along any geodesic. Then,  $g$ and
$g$ and  $L$ have the same geodesics and, in particular,
$L$ have the same geodesics and, in particular,  $L$ is of Berwald type.
$L$ is of Berwald type.
Proof. In this proof, we emphasize ‘ $g$-’ for objects considered with respect to
$g$-’ for objects considered with respect to  $g$; otherwise, they are understood with respect to
$g$; otherwise, they are understood with respect to  $L$.
$L$.
Denote by  $\nabla^g$ the
$\nabla^g$ the  $g$-covariant derivative. Fix
$g$-covariant derivative. Fix  $x \in M$ and, for
$x \in M$ and, for  $v \in T_xM$, we define
$v \in T_xM$, we define
 \begin{equation*} \kappa(v) :=\nabla^g_t [\dot{\eta}_v](0) \in T_xM, \end{equation*}
\begin{equation*} \kappa(v) :=\nabla^g_t [\dot{\eta}_v](0) \in T_xM, \end{equation*}where  $\eta_v$ is the geodesic with
$\eta_v$ is the geodesic with  $\dot{\eta}_v(0)=v$. We shall show that
$\dot{\eta}_v(0)=v$. We shall show that  $\kappa$ vanishes for all
$\kappa$ vanishes for all  $v \in T_xM$, namely
$v \in T_xM$, namely  $\eta_v$ is also a
$\eta_v$ is also a  $g$-geodesic.
$g$-geodesic.
Given  $w \in T_xM$, let
$w \in T_xM$, let  $W$ be the parallel vector field along
$W$ be the parallel vector field along  $\eta_v$ such that
$\eta_v$ such that  $W(0)=w$ (i.e.,
$W(0)=w$ (i.e.,  $D_{\dot{\eta}_v}^{\dot{\eta}_v} W \equiv 0$). We claim that
$D_{\dot{\eta}_v}^{\dot{\eta}_v} W \equiv 0$). We claim that
 \begin{equation}
\frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \kappa(v+sw) \Bigr]_{s=0} =2 \nabla^g_t W(0).
\end{equation}
\begin{equation}
\frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \kappa(v+sw) \Bigr]_{s=0} =2 \nabla^g_t W(0).
\end{equation}The left-hand side can be understood in terms of local coordinates as
 \begin{equation*} \sum_{i=1}^n \frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \kappa^i(v+sw) \Bigr]_{s=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x \in T_xM. \end{equation*}
\begin{equation*} \sum_{i=1}^n \frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \kappa^i(v+sw) \Bigr]_{s=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x \in T_xM. \end{equation*} To this end, we employ a normal coordinate system with respect to  $g$ around
$g$ around  $x$ (see, e.g., [Reference O’Neill36, Proposition 3.33]). Then, the
$x$ (see, e.g., [Reference O’Neill36, Proposition 3.33]). Then, the  $g$-Christoffel symbols at
$g$-Christoffel symbols at  $x$ vanish, thereby
$x$ vanish, thereby
 \begin{equation*} \kappa(v) =\sum_{i=1}^n \ddot{\eta}_v^i(0) \frac{\partial}{\partial x^i}\bigg|_x, \qquad
\nabla^g_t W(0) =\sum_{i=1}^n \dot{W}^i(0) \frac{\partial}{\partial x^i}\bigg|_x. \end{equation*}
\begin{equation*} \kappa(v) =\sum_{i=1}^n \ddot{\eta}_v^i(0) \frac{\partial}{\partial x^i}\bigg|_x, \qquad
\nabla^g_t W(0) =\sum_{i=1}^n \dot{W}^i(0) \frac{\partial}{\partial x^i}\bigg|_x. \end{equation*}This implies that
 \begin{align*} \frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \kappa(v+sw) \Bigr]_{s=0}
&=\sum_{i=1}^n \frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \ddot{\eta}^i_{v+sw}(0) \Bigr]_{s=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x\\
& =\sum_{i=1}^n \frac{\mathrm{d}^2}{\mathrm{d} t^2} \biggl[ \frac{\partial}{\partial s} \Bigl[ \eta^i_{v+sw}(t) \Bigr]_{s=0} \biggr]_{t=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x. \end{align*}
\begin{align*} \frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \kappa(v+sw) \Bigr]_{s=0}
&=\sum_{i=1}^n \frac{\mathrm{d}}{\mathrm{d} s} \Bigl[ \ddot{\eta}^i_{v+sw}(0) \Bigr]_{s=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x\\
& =\sum_{i=1}^n \frac{\mathrm{d}^2}{\mathrm{d} t^2} \biggl[ \frac{\partial}{\partial s} \Bigl[ \eta^i_{v+sw}(t) \Bigr]_{s=0} \biggr]_{t=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x. \end{align*}We set
 \begin{equation*} J(t) :=\sum_{i=1}^n \frac{\partial}{\partial s} \Bigl[ \eta^i_{v+sw}(t) \Bigr]_{s=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x, \end{equation*}
\begin{equation*} J(t) :=\sum_{i=1}^n \frac{\partial}{\partial s} \Bigl[ \eta^i_{v+sw}(t) \Bigr]_{s=0} \cdot \frac{\partial}{\partial x^i}\bigg|_x, \end{equation*}which is a Jacobi field along  $\eta_v$ such that
$\eta_v$ such that  $J(0)=0$ and
$J(0)=0$ and  $D^{\dot{\eta}_v}_{\dot{\eta}_v} J(0)=w$. It follows that
$D^{\dot{\eta}_v}_{\dot{\eta}_v} J(0)=w$. It follows that  $J(t)=tW(t)+O(t^3)$ (as in the proof of Lemma 5.1), and hence
$J(t)=tW(t)+O(t^3)$ (as in the proof of Lemma 5.1), and hence
 \begin{equation*} \sum_{i=1}^n \ddot{J}^i(0) \frac{\partial}{\partial x^i}\bigg|_x
=\sum_{i=1}^n 2\dot{W}^i(0) \frac{\partial}{\partial x^i}\bigg|_x
=2\nabla^g_t W(0). \end{equation*}
\begin{equation*} \sum_{i=1}^n \ddot{J}^i(0) \frac{\partial}{\partial x^i}\bigg|_x
=\sum_{i=1}^n 2\dot{W}^i(0) \frac{\partial}{\partial x^i}\bigg|_x
=2\nabla^g_t W(0). \end{equation*}This yields (5.1).
Now, for any parallel vector fields  $V,W$ along
$V,W$ along  $\eta_v$, we infer from the hypothesis that
$\eta_v$, we infer from the hypothesis that
 \begin{equation}
0 =\frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g(V,W) \Bigr] =g(\nabla^g_t V,W) +g(V,\nabla^g_t W).
\end{equation}
\begin{equation}
0 =\frac{\mathrm{d}}{\mathrm{d} t} \Bigl[ g(V,W) \Bigr] =g(\nabla^g_t V,W) +g(V,\nabla^g_t W).
\end{equation} On the one hand, plugging  $V=W=\dot{\eta}_{v+sw}$ into (5.2) at
$V=W=\dot{\eta}_{v+sw}$ into (5.2) at  $t=0$ implies
$t=0$ implies  $g(\kappa(v+sw),v+sw)=0$. Combining this with (5.1), we find, for
$g(\kappa(v+sw),v+sw)=0$. Combining this with (5.1), we find, for  $W$ as in (5.1),
$W$ as in (5.1),
 \begin{equation*} 0 =\frac{\mathrm{d}}{\mathrm{d} s}\Bigl[ g\bigl( \kappa(v+sw),v+sw \bigr) \Bigr]_{s=0}
=2g\bigl( \nabla^g_t W(0),v \bigr) +g\bigl( \kappa(v),w \bigr). \end{equation*}
\begin{equation*} 0 =\frac{\mathrm{d}}{\mathrm{d} s}\Bigl[ g\bigl( \kappa(v+sw),v+sw \bigr) \Bigr]_{s=0}
=2g\bigl( \nabla^g_t W(0),v \bigr) +g\bigl( \kappa(v),w \bigr). \end{equation*} On the other hand, (5.2) with  $V=\dot{\eta}_v$ and
$V=\dot{\eta}_v$ and  $W$ as in (5.1) at
$W$ as in (5.1) at  $t=0$ shows
$t=0$ shows
 \begin{equation*} g\bigl( \kappa(v),w \bigr) +g\bigl (v,\nabla^g_t W(0) \bigr) =0. \end{equation*}
\begin{equation*} g\bigl( \kappa(v),w \bigr) +g\bigl (v,\nabla^g_t W(0) \bigr) =0. \end{equation*} Comparing these equations, we obtain  $g(\kappa(v),w)=0$. Since
$g(\kappa(v),w)=0$. Since  $w \in T_xM$ was arbitrary,
$w \in T_xM$ was arbitrary,  $\kappa(v)=0$ holds. Therefore,
$\kappa(v)=0$ holds. Therefore,  $g$ and
$g$ and  $L$ have the same geodesics. This implies that the Chern connection of
$L$ have the same geodesics. This implies that the Chern connection of  $L$ coincides with the Levi-Civita connection of
$L$ coincides with the Levi-Civita connection of  $g$, thereby
$g$, thereby  $L$ is of Berwald type.
$L$ is of Berwald type.
Remark 5.3. (Canonical Lorentzian metrics)
In order to build a bridge between Lemma 5.1 and Proposition 5.2, in the situation of Lemma 5.1, we need to construct a Lorentzian metric  $g$ satisfying the hypothesis in Proposition 5.2. In the positive definite case, it was done in [Reference Ivanov and Lytchak21, Proposition 4.2] by using a Riemannian metric ‘canonically’ associated with a Finsler metric. Such a construction is not known in Lorentz–Finsler geometry; this is indeed a major obstacle in the metrization problem (recall Remark 2.4). It is sufficient to find a ‘canonical’ way of choosing a finite measure on each tangent space
$g$ satisfying the hypothesis in Proposition 5.2. In the positive definite case, it was done in [Reference Ivanov and Lytchak21, Proposition 4.2] by using a Riemannian metric ‘canonically’ associated with a Finsler metric. Such a construction is not known in Lorentz–Finsler geometry; this is indeed a major obstacle in the metrization problem (recall Remark 2.4). It is sufficient to find a ‘canonical’ way of choosing a finite measure on each tangent space  $T_xM$, as taking an average of
$T_xM$, as taking an average of  $g_v$ in
$g_v$ in  $v \in T_xM$ with that measure provides a Lorentzian metric (in the positive definite case, the uniform measure on the unit ball or sphere plays a role). However, the noncompactness of the isometry group of Minkowski metrics arises as an essential difficulty in such a construction.
$v \in T_xM$ with that measure provides a Lorentzian metric (in the positive definite case, the uniform measure on the unit ball or sphere plays a role). However, the noncompactness of the isometry group of Minkowski metrics arises as an essential difficulty in such a construction.
5.2. Concavity and the variance functional
In the positive definite case, there is an interesting nonsmooth characterization of Busemann’s convexity in terms of optimal transport theory. We refer to [Reference Villani42] for the basic knowledge of optimal transport theory.
Let  $(X,d)$ be a complete geodesic space. Given a Borel probability measure
$(X,d)$ be a complete geodesic space. Given a Borel probability measure  $\mu \in \mathcal{P}_2(X)$ of finite second moment, its variance is defined by
$\mu \in \mathcal{P}_2(X)$ of finite second moment, its variance is defined by
 \begin{equation*} \mathsf{var}(\mu) :=\inf_{x \in X} \int_X d^2(x,y) \,\mu(\mathrm{d} y). \end{equation*}
\begin{equation*} \mathsf{var}(\mu) :=\inf_{x \in X} \int_X d^2(x,y) \,\mu(\mathrm{d} y). \end{equation*} A point  $x \in X$ achieving the above infimum is called a barycentre (also called centre of mass or Fréchet mean) of
$x \in X$ achieving the above infimum is called a barycentre (also called centre of mass or Fréchet mean) of  $\mu$. If
$\mu$. If  $(X,d)$ is globally convex, then the set of barycentres of
$(X,d)$ is globally convex, then the set of barycentres of  $\mu$ is a convex set. In the case where
$\mu$ is a convex set. In the case where  $(X,d)$ is a complete CAT
$(X,d)$ is a complete CAT $(0)$-space, any
$(0)$-space, any  $\mu$ admits a unique barycentre.
$\mu$ admits a unique barycentre.
Proposition 5.4. (Kim–Pass [Reference Kim and Pass23])
A complete separable geodesic space  $(X,d)$ is globally convex if and only if
$(X,d)$ is globally convex if and only if  $\sqrt{\mathsf{var}}$ is convex along geodesics in the
$\sqrt{\mathsf{var}}$ is convex along geodesics in the  $L^2$-Wasserstein space
$L^2$-Wasserstein space  $(\mathcal{P}_2(X),W_2)$.
$(\mathcal{P}_2(X),W_2)$.
Proof. To be precise, it was shown in [Reference Kim and Pass23, Proposition 2.1] that  $d^2$ is convex if and only if
$d^2$ is convex if and only if  $\mathsf{var}$ is convex. For completeness, we give a proof along the same lines as [Reference Kim and Pass23].
$\mathsf{var}$ is convex. For completeness, we give a proof along the same lines as [Reference Kim and Pass23].
In the ‘if’ part, given minimizing geodesics  $\gamma_1,\gamma_2 \colon [0,1] \longrightarrow X$, with
$\gamma_1,\gamma_2 \colon [0,1] \longrightarrow X$, with  $\gamma_1(0)=\gamma_2(0)$, consider probability measures
$\gamma_1(0)=\gamma_2(0)$, consider probability measures  $\mu_t:=(\delta_{\gamma_1(t)}+\delta_{\gamma_2(t)})/2$. Then,
$\mu_t:=(\delta_{\gamma_1(t)}+\delta_{\gamma_2(t)})/2$. Then,  $(\mu_t)_{t \in [0,1]}$ is a
$(\mu_t)_{t \in [0,1]}$ is a  $W_2$-geodesic and
$W_2$-geodesic and
 \begin{equation*} \mathsf{var}(\mu_t) =\frac{1}{4}d^2 \bigl( \gamma_1(t),\gamma_2(t) \bigr) \end{equation*}
\begin{equation*} \mathsf{var}(\mu_t) =\frac{1}{4}d^2 \bigl( \gamma_1(t),\gamma_2(t) \bigr) \end{equation*}for all  $t \in [0,1]$ (any midpoint of
$t \in [0,1]$ (any midpoint of  $\gamma_1(t)$ and
$\gamma_1(t)$ and  $\gamma_2(t)$ is a barycentre of
$\gamma_2(t)$ is a barycentre of  $\mu_t$). Hence, the convexity of
$\mu_t$). Hence, the convexity of  $\sqrt{\mathsf{var}(\mu_t)}$ implies that
$\sqrt{\mathsf{var}(\mu_t)}$ implies that  $t \longmapsto d(\gamma_1(t),\gamma_2(t))$ is convex.
$t \longmapsto d(\gamma_1(t),\gamma_2(t))$ is convex.
For general minimizing geodesics  $\gamma_1,\gamma_2 \colon [0,1] \longrightarrow X$, let
$\gamma_1,\gamma_2 \colon [0,1] \longrightarrow X$, let  $\eta\colon [0,1] \longrightarrow X$ be a minimizing geodesic from
$\eta\colon [0,1] \longrightarrow X$ be a minimizing geodesic from  $\gamma_1(0)$ to
$\gamma_1(0)$ to  $\gamma_2(1)$. Then, we deduce from the triangle inequality and the above estimate that
$\gamma_2(1)$. Then, we deduce from the triangle inequality and the above estimate that
 \begin{align*}
d\bigl( \gamma_1(t),\gamma_2(t) \bigr)
&\le d\bigl( \gamma_1(t),\eta(t) \bigr) +d\bigl( \eta(t),\gamma_2(t) \bigr) \\
&\le td\bigl( \gamma_1(1),\gamma_2(1) \bigr) +(1-t)d\bigl( \gamma_1(0),\gamma_2(0) \bigr).
\end{align*}
\begin{align*}
d\bigl( \gamma_1(t),\gamma_2(t) \bigr)
&\le d\bigl( \gamma_1(t),\eta(t) \bigr) +d\bigl( \eta(t),\gamma_2(t) \bigr) \\
&\le td\bigl( \gamma_1(1),\gamma_2(1) \bigr) +(1-t)d\bigl( \gamma_1(0),\gamma_2(0) \bigr).
\end{align*} Thus,  $(X,d)$ is globally convex.
$(X,d)$ is globally convex.
To see the ‘only if’ part, let  $\mu_t =(e_t)_* \Pi$ be a
$\mu_t =(e_t)_* \Pi$ be a  $W_2$-geodesic induced from a probability measure
$W_2$-geodesic induced from a probability measure  $\Pi$ on the set
$\Pi$ on the set  $\Gamma(X)$ of minimizing geodesics
$\Gamma(X)$ of minimizing geodesics  $\eta\colon [0,1] \longrightarrow X$, where
$\eta\colon [0,1] \longrightarrow X$, where  $e_t(\eta):=\eta(t)$ and
$e_t(\eta):=\eta(t)$ and  $(e_t)_* \Pi$ denotes the push-forward of
$(e_t)_* \Pi$ denotes the push-forward of  $\Pi$ by
$\Pi$ by  $e_t$ (see [Reference Lisini27, Theorem 6]). For arbitrary
$e_t$ (see [Reference Lisini27, Theorem 6]). For arbitrary  $\varepsilon \gt 0$, take
$\varepsilon \gt 0$, take  $x_i \in X$ such that
$x_i \in X$ such that
 \begin{equation*} \biggl( \int_X d^2(x_i,y) \,\mu_i(\mathrm{d} y) \biggr)^{1/2} \le \sqrt{\mathsf{var}(\mu_i)} +\varepsilon, \qquad i=0,1. \end{equation*}
\begin{equation*} \biggl( \int_X d^2(x_i,y) \,\mu_i(\mathrm{d} y) \biggr)^{1/2} \le \sqrt{\mathsf{var}(\mu_i)} +\varepsilon, \qquad i=0,1. \end{equation*} Let  $\gamma\colon [0,1] \longrightarrow X$ be the (unique) minimizing geodesic from
$\gamma\colon [0,1] \longrightarrow X$ be the (unique) minimizing geodesic from  $x_0$ to
$x_0$ to  $x_1$. Then, it follows from the global convexity of
$x_1$. Then, it follows from the global convexity of  $(X,d)$ that
$(X,d)$ that
 \begin{align*}
\sqrt{\mathsf{var}(\mu_t)} &\le \biggl( \int_X d^2\bigl( \gamma(t),y \bigr) \,\mu_t(\mathrm{d} y) \biggr)^{1/2}
=\biggl( \int_{\Gamma(X)} d^2\bigl( \gamma(t),\eta(t) \bigr) \,\Pi(\mathrm{d}\eta) \biggr)^{1/2} \\
&\le \biggl( \int_{\Gamma(X)} \Bigl( (1-t)d\bigl( \gamma(0),\eta(0) \bigr) +td\bigl( \gamma(1),\eta(1) \bigr) \Bigr)^2 \,\Pi(\mathrm{d}\eta) \biggr)^{1/2} \\
&\le (1-t) \biggl( \int_{\Gamma(X)} d^2\bigl( \gamma(0),\eta(0) \bigr) \,\Pi(\mathrm{d}\eta) \biggr)^{1/2}\\
&\quad +t \biggl( \int_{\Gamma(X)} d^2\bigl( \gamma(1),\eta(1) \bigr) \,\Pi(\mathrm{d}\eta) \biggr)^{1/2} \\
&= (1-t) \biggl( \int_X d^2(x_0,y) \,\mu_0(\mathrm{d} y) \biggr)^{1/2} +t \biggl( \int_X d^2(x_1,y) \,\mu_1(\mathrm{d} y) \biggr)^{1/2} \\
&\le (1-t)\sqrt{\mathsf{var}(\mu_0)} +t\sqrt{\mathsf{var}(\mu_1)} +\varepsilon.
\end{align*}
\begin{align*}
\sqrt{\mathsf{var}(\mu_t)} &\le \biggl( \int_X d^2\bigl( \gamma(t),y \bigr) \,\mu_t(\mathrm{d} y) \biggr)^{1/2}
=\biggl( \int_{\Gamma(X)} d^2\bigl( \gamma(t),\eta(t) \bigr) \,\Pi(\mathrm{d}\eta) \biggr)^{1/2} \\
&\le \biggl( \int_{\Gamma(X)} \Bigl( (1-t)d\bigl( \gamma(0),\eta(0) \bigr) +td\bigl( \gamma(1),\eta(1) \bigr) \Bigr)^2 \,\Pi(\mathrm{d}\eta) \biggr)^{1/2} \\
&\le (1-t) \biggl( \int_{\Gamma(X)} d^2\bigl( \gamma(0),\eta(0) \bigr) \,\Pi(\mathrm{d}\eta) \biggr)^{1/2}\\
&\quad +t \biggl( \int_{\Gamma(X)} d^2\bigl( \gamma(1),\eta(1) \bigr) \,\Pi(\mathrm{d}\eta) \biggr)^{1/2} \\
&= (1-t) \biggl( \int_X d^2(x_0,y) \,\mu_0(\mathrm{d} y) \biggr)^{1/2} +t \biggl( \int_X d^2(x_1,y) \,\mu_1(\mathrm{d} y) \biggr)^{1/2} \\
&\le (1-t)\sqrt{\mathsf{var}(\mu_0)} +t\sqrt{\mathsf{var}(\mu_1)} +\varepsilon.
\end{align*} Letting  $\varepsilon \to 0$ shows that
$\varepsilon \to 0$ shows that  $t \longmapsto \sqrt{\mathsf{var}(\mu_t)}$ is convex.
$t \longmapsto \sqrt{\mathsf{var}(\mu_t)}$ is convex.
Remark 5.5. (Variance and barycentre)
To formulate a Lorentzian counterpart to Proposition 5.4, we need an appropriate notion of variance, which is an open question. This is related to another open question: how to define the barycentre of a probability measure in a Lorentzian or Finsler spacetime? Even in the Minkowski space  $(\mathbf R^n,L)$, no reasonable characterization of the linear average
$(\mathbf R^n,L)$, no reasonable characterization of the linear average  $\int_{\mathbf R^n} x \,\mu(\mathrm{d} x)$ in a synthetic/metric way seems to be known. These notions will be helpful to develop probability theory and statistics on spacetimes.
$\int_{\mathbf R^n} x \,\mu(\mathrm{d} x)$ in a synthetic/metric way seems to be known. These notions will be helpful to develop probability theory and statistics on spacetimes.
Acknowledgements
This research was supported in part by the Austrian Science Fund (FWF) [Grants DOI 10.55776/PAT1996423 and 10.55776/EFP6]. SO was supported by the JSPS Grant-in-Aid for Scientific Research (KAKENHI) 22H04942, 24K00523. FR acknowledges the support of the European Union - NextGenerationEU, in the framework of the PRIN Project ‘Contemporary perspectives on geometry and gravity’ (code 2022JJ8KER – CUP G53D23001810006). The views and opinions expressed are solely those of the authors and do not necessarily reflect those of the European Union, nor can the European Union be held responsible for them.
For open access purposes, the authors have applied a Creative Commons Attribution 4.0 International license to any author-accepted manuscript version arising from this submission.


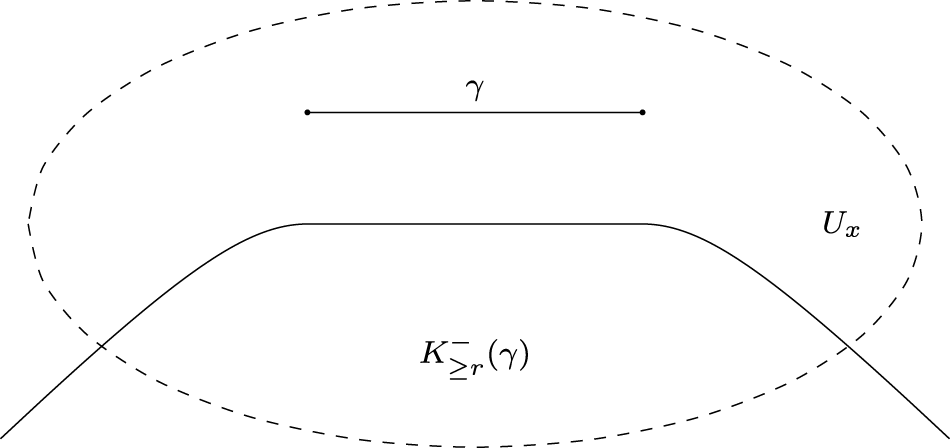

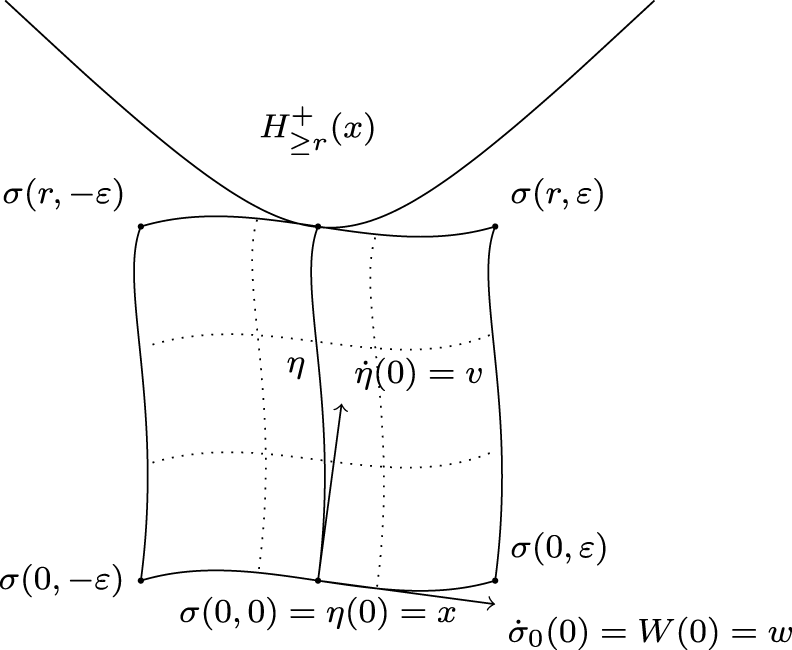


 Open access
Open access