


INTRODUCTION
Visibility meters for daytime use may be separated into two broad classes. One includes devices which can monitor the brightness contrast between an object and the surroundings (luminance meters). The other includes devices which monitor a limited volume of air (eg transmissometers). The latter are more popular than the former because they are easy to operate for continuous monitoring, and have a clear theoretical background (Takeuchi 1980).
Visual range is defined as the greatest distance at which an object can be seen and identified. In accordance with Koschmieder_s theory, the apparent brightness of a black object, with baffles covered by black cloth, was compared simultaneously with the apparent brightness of background sky near the target, and the visual range was derived. Visual range through a transmissometer was monitored on plane snow surface where there was no obstruction within 800 m upwind.
EXPRESSION FOR VISUAL RANGE
If the luminance of the target is Bd and that of the background is Bh, the contrast C is defined as
Bd = luminance of the object dm separate from the luminance meter. Bh = horizontal background luminance.
A black box (Co = -1) was used as the target object located 30 m from the luminance meter. Duntley (1948) expressed the contrast attenuation as
s: light attenuation coefficient.
Koschmieder (1925) defined the visual range (V) as the distance at which the brightness contrast reached the liminal value (e = 0.05, in highway meteorology).
Consequently, the visual range V (m) was derived from the brightness contrast as

d = distance from luminance meter to the target (30 m). Whereas Bouguer_s law expressed the light attenuation coefficient as
T=transmissivity. The visual range through the transmissiometer is
path length, d = 30 m.
The transformations of equations were mentioned by Middleton (1952). A pair of luminance meters (visual angle 0.2_) with relative luminous efficiency of the human eye were used to measure luminances of the background and the target respectively. The human eye is more sensitive in the lower visual range. The expected lowest visual range was about 100 m, and the relative error is

If ?T = preset accuracy, one can show that ?V/V has a minimum at 3d/V = 1; consequently the base line should be of the order of 1/3 of the expected visual range. The path length of the transmissometer was 30 m.
COMPARISON OF MEAN VUSUAL RANGES FROM DAYTIME TO TWILIGHT
Luminance of the background depends on the altitude of sun and weather conditions. Mean visual range (every 10 minutes) was observed from daytime to twilight on 22 February 1983.
Visual range determined by the two methods is shown in Figure 1. The visual range difference was not large in heavy blowing snow in daytime. However, the difference increased in light blowing snow conditions. From daytime to twilight, the light blowing snow intensity gradually decreased, while at the same time the visual range difference increased and was observed to increase rapidly before and after sunset. It is assumed that the difference in
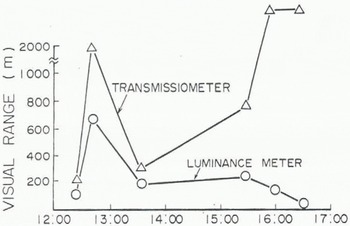
Fig. 1. Mean visual range variation as a function of time of day.
daytime depends on weather conditions, including the degree of atmospheric uniformity,
DIFFERENCE OF VISUAL RANGES IN DAYTIME WITH BLOWING SNOW
Daytime visual range derived from luminance contrast was compared precisely with that derived from transmissivity in blowing snow under partly cloudy sky between 12:17 and 12:27 hrs on 22 February 1983. Mean visual ranges at 75 cm above the snow surface through the transmissometer and luminance meter were 650 m and 200 m respectively. Mean wind speed at same level was 7.5 m/s, and the visual range dropped below 100 m several times with precipitation.
The shadow of a pole was recognized occasionally. Black cloud was scattered above the horizon. The luminance of background variated from 5000 cd (candela) to 20000 cd. Data through the transmissometer and luminance meter were sampled at intervals of 0.1 seconds from magnetic tapes simultaneously and compared with each other.
The visual ranges from the two types of visibility meters are illustrated in Figure 2. It can be seen that the visual range through the transmissometer was usually greater than that through the luminance meter.

Fig. 2. The difference of visual ranges through the transmissometer and through a pair of luminance meters.
CONCLUSION
In accordance with the definition of visual range, the apparent brightness of the target black box was compared with the apparent brightness of the sky above the horizon. The estimated visual range was compared simultaneously with visual range through the transmissometer.
Thus field observations showed that the visual range through the transmissometer gave a sampling error in light blowing snow because atmospheric uniformity had a tendency to disappear and the variation of background luminance increased. This tendency is inevitable in all equipment which monitors a small volume of air (Johnson 1954). However, visual range measured by the two methods coincided in heavy blowing snow.


