


Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
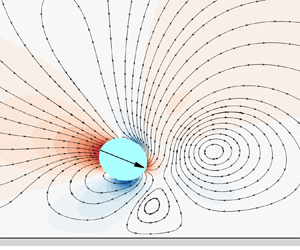
Nie, Deming
Zhang, Kai
and
Lin, Jianzhong
2025.
Hydrodynamic interaction between microswimmers and a circular surface: Circular motion and flower-like paths.
Physics of Fluids,
Vol. 37,
Issue. 2,
Guan, Geng
Jiang, Tongxiao
Ying, Yuxiang
and
Lin, Jianzhong
2025.
Patterned slip boundaries modulate microswimmer dynamics in two-dimensional superhydrophobic microchannels.
Powder Technology,
Vol. 465,
Issue. ,
p.
121309.
Huang, Lizhong
Lin, Jianzhong
Wang, Ruijin
Li, Yang
Jin, Xiao
and
Shao, Chun
2025.
How can two circular self-propelled particles form a stable wedge-like conformation in channel flow?.
Journal of Fluid Mechanics,
Vol. 1014,
Issue. ,