


Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Zheng, Changdong
Xie, Fangfang
Ji, Tingwei
Zhou, Hongjie
and
Zheng, Yao
2024.
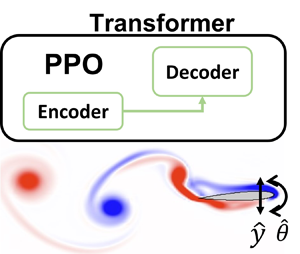
Transformer-based in-context policy learning for efficient active flow control across various airfoils.
Journal of Fluid Mechanics,
Vol. 1001,
Issue. ,
Qin, Hao
Liang, Hongjian
Su, Haowen
and
Wen, Zhixuan
2024.
A parallelized environmental-sensing and multi-tasks model for intelligent marine structure control in ocean waves coupling deep reinforcement learning and computational fluid dynamics.
Physics of Fluids,
Vol. 36,
Issue. 8,
Wang, Zhangyuan
Deng, Nan
Cornejo Maceda, Guy Y.
Xu, Wenhua
Noack, Bernd R.
Li, Ruipeng
Cui, Weicheng
and
Fan, Dixia
2024.
Fast-adaption thrust optimization by cluster-based control for a pitching foil.
Physics of Fluids,
Vol. 36,
Issue. 9,
Yang, Yinghe
Wei, Handi
Fan, Dixia
and
Li, Ang
2024.
A new strategy optimisation method for underwater flapping foil propulsion based on Twin-Delayed Deep Deterministic and Gaussian process regression.
Ocean Engineering,
Vol. 311,
Issue. ,
p.
118813.
Kim, Innyoung
Jeon, Youngmin
Chae, Jonghyun
and
You, Donghyun
2024.
Deep Reinforcement Learning for Fluid Mechanics: Control, Optimization, and Automation.
Fluids,
Vol. 9,
Issue. 9,
p.
216.
Kumpatla, Sreya
Arndt, Corey
and
TerMaath, Stephanie
2025.
The History of the Slotted Natural-Laminar-Flow Airfoil for Improved Fuel Efficiency.
Aerospace,
Vol. 12,
Issue. 3,
p.
251.
Jia, Wang
and
Xu, Hang
2025.
Optimizing synthetic jet placement for control stability in increasing Reynolds number flows based on deep reinforcement learning.
International Communications in Heat and Mass Transfer,
Vol. 166,
Issue. ,
p.
109203.
Zhu, Yi
Kang, Linlin
Tong, Xinyu
Ma, Jingtao
Tian, Fangbao
and
Fan, Dixia
2025.
Intermittent swimmers optimize energy expenditure with flick-to-flick motor control.
Journal of Fluid Mechanics,
Vol. 1006,
Issue. ,
Wang, Zhangyuan
Xu, Wenhua
Han, Xuliang
Li, Ruipeng
Gong, Jiaye
Cui, Weicheng
and
Fan, Dixia
2025.
A low cost strategy on energy harvesting of flapping foil with time-warping optimization.
Energy,
Vol. 337,
Issue. ,
p.
138554.
Bi, Ran
Zheng, Changdong
Zheng, Hongyu
Ji, Tingwei
Xie, Fangfang
and
Zheng, Yao
2025.
Mimic biological flapping motion for a two-dimensional wing by reinforcement learning.
Bioinspiration & Biomimetics,
Vol. 20,
Issue. 3,
p.
036011.
Li, Jinying
Dai, Yuting
Hu, Yating
Zhang, Yuming
and
Yang, Chao
2025.
Deep reinforcement learning control for stall flutter via active camber morphing.
Physics of Fluids,
Vol. 37,
Issue. 10,
Gu, Junwen
Wang, Jian
Liu, Zhijie
Tan, Min
Yu, Junzhi
and
Wu, Zhengxing
2025.
Deformation Control and Thrust Analysis of a Flexible Fishtail With Muscle-Like Actuation.
IEEE Transactions on Robotics,
Vol. 41,
Issue. ,
p.
159.
Chen, Shunhang
Fan, Dixia
Shu, Chang
and
Lu, Zhenbo
2025.
Effect of active leading-edge morphing on the vortex dynamics propulsive performance of a heaving plate.
Ocean Engineering,
Vol. 341,
Issue. ,
p.
122723.
Liu, Yangzhe
Wang, Zhao
and
Tsang, Alan C. H.
2025.
Reinforcement learning selects multimodal locomotion strategies for bioinspired microswimmers.
Soft Matter,
Vol. 21,
Issue. 12,
p.
2363.
Feng, Haodong
Hu, Peiyan
Wang, Yue
Fan, Dixia
Wu, Tailin
and
Zhang, Yuzhong
2025.
Physics-informed super-resolution and forecasting method based on inaccurate partial differential equations and partial observation.
Physics of Fluids,
Vol. 37,
Issue. 6,
Li, Jinyu
Li, Ruipeng
Gong, Jiaye
Cui, Weicheng
and
Fan, Dixia
2025.
Optimizing flapping foil dynamics: A data-driven framework for motion optimization.
Ocean Engineering,
Vol. 342,
Issue. ,
p.
122990.
Kim, Innyoung
and
You, Donghyun
2025.
Discovering optimal gas injection strategies for a fluidized bed system using deep reinforcement learning.
Physics of Fluids,
Vol. 37,
Issue. 8,
Ye, Mai
Ma, Hao
Ren, Yaru
Zhang, Chi
Haidn, Oskar J.
and
Hu, Xiangyu
2025.
DRLinSPH: an open-source platform using deep reinforcement learning and SPHinXsys for fluid-structure-interaction problems.
Engineering Applications of Computational Fluid Mechanics,
Vol. 19,
Issue. 1,