



No CrossRef data available.
Published online by Cambridge University Press: 13 September 2024
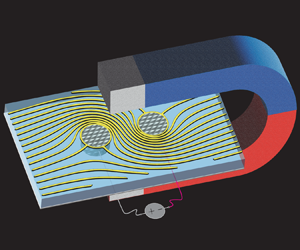
Consider the motion of a thin layer of electrically conducting fluid, between two closely spaced parallel plates, in a classical Hele-Shaw geometry. Furthermore, let the system be immersed in a uniform external magnetic field (normal to the plates) and let electrical current be driven between conducting probes immersed in the fluid layer. In the present paper, we analyse the ensuing fluid flow at low Hartmann numbers. Physically, the system is particularly interesting because it allows for circulation in the flow, which is not possible in the standard pressure-driven Hele-Shaw cell. We first elucidate the mechanism of flow generation both physically and mathematically. After formulating the problem using complex variables, we present mathematical solutions for a class of canonical multiply connected geometries in terms of the prime function framework developed by Crowdy (Solving Problems in Multiply Connected Domains, SIAM, 2020). We then demonstrate how recently developed fast numerical methods may be applied to accurately determine the flow field in arbitrary geometries.