


1. Introduction
This study investigates the effects of body elasticity on three-dimensional viscous streaming. Viscous streaming, an inertial phenomenon, refers to the steady, rectified flows that emerge when a fluid oscillates around a localized microfeature. Given its ability to remodel surrounding flows over short time and length scales, streaming has found application in multiple aspects of microfluidics, from particle manipulation (Lutz, Chen & Schwartz Reference Lutz, Chen and Schwartz2003, Reference Lutz, Chen and Schwartz2005; Marmottant & Hilgenfeldt Reference Marmottant and Hilgenfeldt2004; Lutz, Chen & Schwartz Reference Lutz, Chen and Schwartz2006; Wang, Jalikop & Hilgenfeldt Reference Wang, Jalikop and Hilgenfeldt2011; Chong et al. Reference Chong, Kelly, Smith and Eldredge2013; Chen & Lee Reference Chen and Lee2014; Klotsa et al. Reference Klotsa, Baldwin, Hill, Bowley and Swift2015; Thameem, Rallabandi & Hilgenfeldt Reference Thameem, Rallabandi and Hilgenfeldt2017) and chemical mixing (Liu et al. Reference Liu, Yang, Pindera, Athavale and Grodzinski2002; Lutz et al. Reference Lutz, Chen and Schwartz2003, Reference Lutz, Chen and Schwartz2005; Ahmed et al. Reference Ahmed, Mao, Juluri and Huang2009) to vesicle transport and lysis (Marmottant & Hilgenfeldt Reference Marmottant and Hilgenfeldt2003, Reference Marmottant and Hilgenfeldt2004). Recently, the use of multi-curvature streaming bodies has expanded the ability to manipulate flows, leading to compact, robust and tunable devices for filtering and separating both synthetic and biological particles (Parthasarathy, Chan & Gazzola Reference Parthasarathy, Chan and Gazzola2019; Bhosale, Parthasarathy & Gazzola Reference Bhosale, Parthasarathy and Gazzola2020; Chan et al. Reference Chan, Bhosale, Parthasarathy and Gazzola2022; Bhosale et al. Reference Bhosale, Vishwanathan, Upadhyay, Parthasarathy, Juarez and Gazzola2022b). More recently yet, motivated by medical and biological applications and building upon past theoretical studies (Wang Reference Wang1965; Riley Reference Riley1966, Reference Riley1998, Reference Riley2001; Rednikov et al. Reference Rednikov, Zhao, Sadhal and Trinh2006; Rednikov & Sadhal Reference Rednikov and Sadhal2011; Sadhal Reference Sadhal2012; Sadhal, Laurell & Lenshof Reference Sadhal, Laurell and Lenshof2014), the effect of body compliance has been considered (Anand & Christov Reference Anand and Christov2020), with one of the studies yielding a first two-dimensional streaming theory for soft cylinders (Bhosale, Parthasarathy & Gazzola Reference Bhosale, Parthasarathy and Gazzola2022a). Its major outcome is encapsulated in the relation
 \begin{equation} \langle \psi_1 \rangle = \sin 2 \theta \left[ \varTheta(r) + \varLambda(r) \right], \end{equation}
\begin{equation} \langle \psi_1 \rangle = \sin 2 \theta \left[ \varTheta(r) + \varLambda(r) \right], \end{equation}
where  $\langle \psi _1 \rangle$ is the time-averaged Stokes streamfunction and
$\langle \psi _1 \rangle$ is the time-averaged Stokes streamfunction and  $r$ and
$r$ and  $\theta$ are the radial and polar coordinates in the cylindrical system. This relation reveals an additional streaming process
$\theta$ are the radial and polar coordinates in the cylindrical system. This relation reveals an additional streaming process  $\varLambda (r)$, purely induced by body elasticity, that is available even in Stokes flows where rigid-body streaming
$\varLambda (r)$, purely induced by body elasticity, that is available even in Stokes flows where rigid-body streaming  $\varTheta (r)$ cannot exist (Holtsmark et al. Reference Holtsmark, Johnsen, Sikkeland and Skavlem1954). Elasticity modulation has then been shown to achieve streaming configurations similar to those of rigid bodies, but at significantly lower frequencies. This frequency reduction has relevant implications, as it renders viscous streaming accessible within the limits of biological actuation.
$\varTheta (r)$ cannot exist (Holtsmark et al. Reference Holtsmark, Johnsen, Sikkeland and Skavlem1954). Elasticity modulation has then been shown to achieve streaming configurations similar to those of rigid bodies, but at significantly lower frequencies. This frequency reduction has relevant implications, as it renders viscous streaming accessible within the limits of biological actuation.
In this work, we extend this understanding to three dimensions by examining the minimal case of an oscillating, soft sphere. We first present an improved theoretical solution for the rigid-sphere case by augmenting the derivation of Lane (Reference Lane1955) with a previously unaccounted term related to vortex stretching. Our formulation is shown to significantly enhance quantitative agreement with direct numerical simulations and experiments. Next, within the same theoretical framework, we consider body elasticity and seek a modified streaming solution dependent on material compliance. We recover an independent elastic modification term, similar in nature to the above two-dimensional result but analytically distinct. We then demonstrate the accuracy of our theory against direct numerical simulations, and show how observed elasticity effects may translate to bodies of complex geometry and topology, further expanding the potential utility of soft streaming.
2. Problem set-up and governing equations
We derive the streaming solution by considering the set-up shown in figure 1, where a three-dimensional viscoelastic solid sphere  $\varOmega _e$ of radius
$\varOmega _e$ of radius  $a$ is immersed in a viscous fluid
$a$ is immersed in a viscous fluid  $\varOmega _f$. The fluid oscillates with velocity
$\varOmega _f$. The fluid oscillates with velocity  $V(t) = \epsilon a \omega \cos \omega t$, where
$V(t) = \epsilon a \omega \cos \omega t$, where  $\epsilon$,
$\epsilon$,  $\omega$ and
$\omega$ and  $t$ represent the non-dimensional amplitude, angular frequency and time. Following our previous set-up for a soft two-dimensional cylinder (Bhosale et al. Reference Bhosale, Parthasarathy and Gazzola2022a), we kinematically enforce zero strain and velocity near the sphere's centre by ‘pinning’ the sphere with a rigid inclusion
$t$ represent the non-dimensional amplitude, angular frequency and time. Following our previous set-up for a soft two-dimensional cylinder (Bhosale et al. Reference Bhosale, Parthasarathy and Gazzola2022a), we kinematically enforce zero strain and velocity near the sphere's centre by ‘pinning’ the sphere with a rigid inclusion  $\varGamma$ of radius
$\varGamma$ of radius  $b < a$, the boundary of which is denoted by
$b < a$, the boundary of which is denoted by  $\partial \varGamma$. We choose to ‘pin’ the sphere to suppress its rigid-body motion and simplify mathematical treatment. Experimentally, this approach may be realized by coating with a soft material a rigid sphere, which in turn can be suspended in flow as in Kotas, Yoda & Rogers (Reference Kotas, Yoda and Rogers2007) or Lane (Reference Lane1955). Finally, we denote by
$\partial \varGamma$. We choose to ‘pin’ the sphere to suppress its rigid-body motion and simplify mathematical treatment. Experimentally, this approach may be realized by coating with a soft material a rigid sphere, which in turn can be suspended in flow as in Kotas, Yoda & Rogers (Reference Kotas, Yoda and Rogers2007) or Lane (Reference Lane1955). Finally, we denote by  $\partial \varOmega$ the boundary between the elastic solid and the viscous fluid.
$\partial \varOmega$ the boundary between the elastic solid and the viscous fluid.

Figure 1. Problem set-up. (a) Three-dimensional viscoelastic solid sphere  $\varOmega _e$ of radius
$\varOmega _e$ of radius  $a$ with a rigid inclusion (pinned zone
$a$ with a rigid inclusion (pinned zone  $\varGamma$ of radius
$\varGamma$ of radius  $b$), immersed in viscous fluid
$b$), immersed in viscous fluid  $\varOmega _f$. In this study, we deploy a spherical coordinate system where
$\varOmega _f$. In this study, we deploy a spherical coordinate system where  $(r, \theta, \phi )$ are the radial, polar and azimuthal coordinates. The sphere is exposed to an oscillatory flow with far-field velocity
$(r, \theta, \phi )$ are the radial, polar and azimuthal coordinates. The sphere is exposed to an oscillatory flow with far-field velocity  $V(t) = \epsilon a \omega \cos (\omega t)$ in the
$V(t) = \epsilon a \omega \cos (\omega t)$ in the  $x$ direction, along the axis of symmetry. (b) Two-dimensional axisymmetric cross-section of the elastic sphere.
$x$ direction, along the axis of symmetry. (b) Two-dimensional axisymmetric cross-section of the elastic sphere.
Both fluid and solid are assumed to be isotropic and incompressible, where the fluid is Newtonian with kinematic viscosity  $\nu _f$ and density
$\nu _f$ and density  $\rho _f$, and the solid follows the Kelvin–Voigt viscoelastic model. Characteristic of soft biological materials (Bower Reference Bower2009), elastic stresses within the solid are modelled via neo-Hookean hyperelasticity with shear modulus
$\rho _f$, and the solid follows the Kelvin–Voigt viscoelastic model. Characteristic of soft biological materials (Bower Reference Bower2009), elastic stresses within the solid are modelled via neo-Hookean hyperelasticity with shear modulus  $G$, kinematic viscosity
$G$, kinematic viscosity  $\nu _e$ and density
$\nu _e$ and density  $\rho _e$. However, we will later show that the choice of hyperelastic or viscoelastic model does not affect the theory. To simplify nomenclature, we henceforth refer to the viscoelastic solid as an elastic solid.
$\rho _e$. However, we will later show that the choice of hyperelastic or viscoelastic model does not affect the theory. To simplify nomenclature, we henceforth refer to the viscoelastic solid as an elastic solid.
The dynamics in the fluid and solid phases is governed by the incompressible Cauchy momentum equations, non-dimensionalized using the characteristic scales of velocity  $V = \epsilon a \omega$, length
$V = \epsilon a \omega$, length  $L = a$, time
$L = a$, time  $T = 1 / \omega$ and hydrostatic pressure
$T = 1 / \omega$ and hydrostatic pressure  $P = \mu _f V / L = \mu _f \epsilon \omega$ (derivation details are in §§ 1 and 10 of the supplementary material available at https://doi.org/10.1017/jfm.2023.1050):
$P = \mu _f V / L = \mu _f \epsilon \omega$ (derivation details are in §§ 1 and 10 of the supplementary material available at https://doi.org/10.1017/jfm.2023.1050):
 \begin{align} \left. \begin{aligned}
\textrm{Incomp.} & \left\{ {\boldsymbol{\nabla}}
\boldsymbol{\cdot} {\boldsymbol{v}} = 0,
{\boldsymbol{x}}\in \varOmega_f \cup \varOmega_e \right.,\\
\textrm{Fluid} & \left\{ \dfrac{\partial
{{\boldsymbol{v}}}}{\partial {t}} + \epsilon
({{\boldsymbol{v}}} \boldsymbol{\cdot}
{{\boldsymbol{\nabla}}}) {{\boldsymbol{v}}} =
\dfrac{1}{M^2} \big(-{\boldsymbol{\nabla}}{p} + {\nabla^2}
{{\boldsymbol{v}}} \big),
{{\boldsymbol{x}}}\in\varOmega_f \right.,\\ \textrm{Solid}
& \left\{ \alpha \mathrm{Cau} \left( \dfrac{\partial
{{\boldsymbol{v}}}}{\partial {t}} + \epsilon
({{\boldsymbol{v}}} \boldsymbol{\cdot}
{{\boldsymbol{\nabla}}}) {{\boldsymbol{v}}} \right) =
\dfrac{\mathrm{Cau}}{M^2} \big( -{\boldsymbol{\nabla}} {p}
+ \beta {\nabla^2} {{\boldsymbol{v}}} \big) +
{{\boldsymbol{\nabla}}} \boldsymbol{\cdot}
({{\boldsymbol{\mathsf{F}}}} {{\boldsymbol{\mathsf{F}}}}^{\rm T})'
,{{\boldsymbol{x}}}\in\varOmega_e, \right. \end{aligned}
\right\}
\end{align}
\begin{align} \left. \begin{aligned}
\textrm{Incomp.} & \left\{ {\boldsymbol{\nabla}}
\boldsymbol{\cdot} {\boldsymbol{v}} = 0,
{\boldsymbol{x}}\in \varOmega_f \cup \varOmega_e \right.,\\
\textrm{Fluid} & \left\{ \dfrac{\partial
{{\boldsymbol{v}}}}{\partial {t}} + \epsilon
({{\boldsymbol{v}}} \boldsymbol{\cdot}
{{\boldsymbol{\nabla}}}) {{\boldsymbol{v}}} =
\dfrac{1}{M^2} \big(-{\boldsymbol{\nabla}}{p} + {\nabla^2}
{{\boldsymbol{v}}} \big),
{{\boldsymbol{x}}}\in\varOmega_f \right.,\\ \textrm{Solid}
& \left\{ \alpha \mathrm{Cau} \left( \dfrac{\partial
{{\boldsymbol{v}}}}{\partial {t}} + \epsilon
({{\boldsymbol{v}}} \boldsymbol{\cdot}
{{\boldsymbol{\nabla}}}) {{\boldsymbol{v}}} \right) =
\dfrac{\mathrm{Cau}}{M^2} \big( -{\boldsymbol{\nabla}} {p}
+ \beta {\nabla^2} {{\boldsymbol{v}}} \big) +
{{\boldsymbol{\nabla}}} \boldsymbol{\cdot}
({{\boldsymbol{\mathsf{F}}}} {{\boldsymbol{\mathsf{F}}}}^{\rm T})'
,{{\boldsymbol{x}}}\in\varOmega_e, \right. \end{aligned}
\right\}
\end{align}
where  ${\boldsymbol {v}}$ and
${\boldsymbol {v}}$ and  $p$ are the velocity and pressure fields and
$p$ are the velocity and pressure fields and  ${\boldsymbol{\mathsf{F}}}$ is the deformation gradient tensor, defined as
${\boldsymbol{\mathsf{F}}}$ is the deformation gradient tensor, defined as  ${\boldsymbol{\mathsf{F}}} = {\boldsymbol{\mathsf{I}}} + {\boldsymbol {\nabla }} {\boldsymbol {u}}$, where
${\boldsymbol{\mathsf{F}}} = {\boldsymbol{\mathsf{I}}} + {\boldsymbol {\nabla }} {\boldsymbol {u}}$, where  ${\boldsymbol{\mathsf{I}}}$ is the identity,
${\boldsymbol{\mathsf{I}}}$ is the identity,  ${\boldsymbol {u}} = {\boldsymbol {x}} - {\boldsymbol {X}}$ is the material displacement field and
${\boldsymbol {u}} = {\boldsymbol {x}} - {\boldsymbol {X}}$ is the material displacement field and  ${\boldsymbol {x}}$,
${\boldsymbol {x}}$,  ${\boldsymbol {X}}$ are the position of a material point after deformation and at rest, respectively. We comment that we uniformly refer to the hydrostatic stress in both the fluid and solid phases as ‘pressure’ (
${\boldsymbol {X}}$ are the position of a material point after deformation and at rest, respectively. We comment that we uniformly refer to the hydrostatic stress in both the fluid and solid phases as ‘pressure’ ( $\kern 0.06em p$) to avoid cluttering the terminology. The prime symbol
$\kern 0.06em p$) to avoid cluttering the terminology. The prime symbol  $'$ on a tensor denotes its deviatoric. The key non-dimensional parameters within this system are the scaled oscillation amplitude
$'$ on a tensor denotes its deviatoric. The key non-dimensional parameters within this system are the scaled oscillation amplitude  $\epsilon$, Womersley number
$\epsilon$, Womersley number  $M = a \sqrt {\rho _f \omega / \mu _f}$, Cauchy number
$M = a \sqrt {\rho _f \omega / \mu _f}$, Cauchy number  $\mathrm {Cau} = \epsilon \rho _f a^2 \omega ^2 / G$, density ratio
$\mathrm {Cau} = \epsilon \rho _f a^2 \omega ^2 / G$, density ratio  $\alpha = \rho _e / \rho _f$ and viscosity ratio
$\alpha = \rho _e / \rho _f$ and viscosity ratio  $\beta = \mu _e / \mu _f$. Physically, the Womersley number (
$\beta = \mu _e / \mu _f$. Physically, the Womersley number ( $M$) represents the ratio of inertial to viscous forces and the Cauchy number (
$M$) represents the ratio of inertial to viscous forces and the Cauchy number ( $\mathrm {Cau}$) represents the ratio of inertial to elastic forces. Therefore, a higher
$\mathrm {Cau}$) represents the ratio of inertial to elastic forces. Therefore, a higher  $M$ corresponds to stronger dominance of inertia in the fluid environment and higher
$M$ corresponds to stronger dominance of inertia in the fluid environment and higher  $\mathrm {Cau}$ values correspond to increasingly soft bodies. We further remark that the inverse of the Womersley number (
$\mathrm {Cau}$ values correspond to increasingly soft bodies. We further remark that the inverse of the Womersley number ( $1/M$) is equivalent to the non-dimensionalized viscous boundary layer thickness (
$1/M$) is equivalent to the non-dimensionalized viscous boundary layer thickness ( $\delta _{AC} / a$), and thus captures a length scale critical to microfluidic processes.
$\delta _{AC} / a$), and thus captures a length scale critical to microfluidic processes.
We then impose a set of boundary conditions upon the governing equations, consistent with Lane (Reference Lane1955):
 $$\begin{gather} \textrm{Pinned zone } \left\{{\boldsymbol{u}} = 0, {\boldsymbol{v}} = 0,~{\boldsymbol{x}}\in \varGamma ,\right. \end{gather}$$
$$\begin{gather} \textrm{Pinned zone } \left\{{\boldsymbol{u}} = 0, {\boldsymbol{v}} = 0,~{\boldsymbol{x}}\in \varGamma ,\right. \end{gather}$$ $$\begin{gather}\textrm{Interface velocity } \left\{ {\boldsymbol{v}}_e = {\boldsymbol{v}}_f,~{\boldsymbol{x}}\in\partial\varOmega \right., \end{gather}$$
$$\begin{gather}\textrm{Interface velocity } \left\{ {\boldsymbol{v}}_e = {\boldsymbol{v}}_f,~{\boldsymbol{x}}\in\partial\varOmega \right., \end{gather}$$ $$\begin{gather}\textrm{Interface
stresses } \begin{cases} {\boldsymbol{\sigma}}_{f}
={-}p{\boldsymbol{\mathsf{I}}} + ({\boldsymbol{\nabla}}
{\boldsymbol{v}} + {\boldsymbol{\nabla}}
{\boldsymbol{v}}^{\rm T}), {\boldsymbol{x}}\in\varOmega_f
,\\ {\boldsymbol{\sigma}}_{e} ={-}p{\boldsymbol{\mathsf{I}}} + \beta
({\boldsymbol{\nabla}} {\boldsymbol{v}} +
{\boldsymbol{\nabla}} {\boldsymbol{v}}^{\rm T})
+\dfrac{M^2}{\mathrm{Cau}}({\boldsymbol{\mathsf{F}}}
{\boldsymbol{\mathsf{F}}}^{\rm T})', {\boldsymbol{x}}\in\varOmega_e,
\\ {\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_e \boldsymbol{\cdot}
{\boldsymbol{n}} = {\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_f \boldsymbol{\cdot}
{\boldsymbol{n}}, {\boldsymbol{x}}\in\partial\varOmega,\\
{\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_e \boldsymbol{\cdot}
{\boldsymbol{t}} = {\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_f \boldsymbol{\cdot}
{\boldsymbol{t}}, {\boldsymbol{x}}\in\partial\varOmega,
\end{cases} \end{gather}$$
$$\begin{gather}\textrm{Interface
stresses } \begin{cases} {\boldsymbol{\sigma}}_{f}
={-}p{\boldsymbol{\mathsf{I}}} + ({\boldsymbol{\nabla}}
{\boldsymbol{v}} + {\boldsymbol{\nabla}}
{\boldsymbol{v}}^{\rm T}), {\boldsymbol{x}}\in\varOmega_f
,\\ {\boldsymbol{\sigma}}_{e} ={-}p{\boldsymbol{\mathsf{I}}} + \beta
({\boldsymbol{\nabla}} {\boldsymbol{v}} +
{\boldsymbol{\nabla}} {\boldsymbol{v}}^{\rm T})
+\dfrac{M^2}{\mathrm{Cau}}({\boldsymbol{\mathsf{F}}}
{\boldsymbol{\mathsf{F}}}^{\rm T})', {\boldsymbol{x}}\in\varOmega_e,
\\ {\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_e \boldsymbol{\cdot}
{\boldsymbol{n}} = {\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_f \boldsymbol{\cdot}
{\boldsymbol{n}}, {\boldsymbol{x}}\in\partial\varOmega,\\
{\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_e \boldsymbol{\cdot}
{\boldsymbol{t}} = {\boldsymbol{n}} \boldsymbol{\cdot}
{\boldsymbol{\sigma}}_f \boldsymbol{\cdot}
{\boldsymbol{t}}, {\boldsymbol{x}}\in\partial\varOmega,
\end{cases} \end{gather}$$
 $$\begin{gather}\textrm{Far field } \left\{{\boldsymbol{v}}(|{\boldsymbol{x}}| \to \infty) = \cos t \hat{i}, {\boldsymbol{x}}\in \varOmega_{f},\right. \end{gather}$$
$$\begin{gather}\textrm{Far field } \left\{{\boldsymbol{v}}(|{\boldsymbol{x}}| \to \infty) = \cos t \hat{i}, {\boldsymbol{x}}\in \varOmega_{f},\right. \end{gather}$$
where (2.2) is the pinned-zone rigidity constraint, (2.3) is the no-slip boundary condition between and solid and fluid phases, (2.4) dictates stress continuity and (2.5) is the far-field flow velocity. We use subscripts  $e$ and
$e$ and  $f$ to denote elastic and fluid phases, respectively, wherever ambiguity may arise. Next, we identify ranges of relevant parameters and solve (2.1) via perturbation theory.
$f$ to denote elastic and fluid phases, respectively, wherever ambiguity may arise. Next, we identify ranges of relevant parameters and solve (2.1) via perturbation theory.
3. Perturbation series solution
In viscous streaming applications, typically we have small non-dimensional oscillation amplitudes  $\epsilon \ll {1}$ (Wang Reference Wang1965; Bertelsen, Svardal & Tjøtta Reference Bertelsen, Svardal and Tjøtta1973; Lutz et al. Reference Lutz, Chen and Schwartz2005), density ratio
$\epsilon \ll {1}$ (Wang Reference Wang1965; Bertelsen, Svardal & Tjøtta Reference Bertelsen, Svardal and Tjøtta1973; Lutz et al. Reference Lutz, Chen and Schwartz2005), density ratio  $\alpha$ and viscosity ratio
$\alpha$ and viscosity ratio  $\beta$ of
$\beta$ of  ${O} \left ( 1 \right )$, and Womersley number
${O} \left ( 1 \right )$, and Womersley number  $M \sim {O} \left ( 1 \right )$ (Marmottant & Hilgenfeldt Reference Marmottant and Hilgenfeldt2004; Lutz et al. Reference Lutz, Chen and Schwartz2006). For the Cauchy number
$M \sim {O} \left ( 1 \right )$ (Marmottant & Hilgenfeldt Reference Marmottant and Hilgenfeldt2004; Lutz et al. Reference Lutz, Chen and Schwartz2006). For the Cauchy number  $\mathrm {Cau}$, we apply the same treatment as in Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a), where we use
$\mathrm {Cau}$, we apply the same treatment as in Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a), where we use  $\mathrm {Cau} = 0$ for a rigid body and
$\mathrm {Cau} = 0$ for a rigid body and  $\mathrm {Cau} = \kappa \epsilon$ with
$\mathrm {Cau} = \kappa \epsilon$ with  $\kappa = {O} \left ( 1 \right )$ for elastic bodies. The latter assumption implies that
$\kappa = {O} \left ( 1 \right )$ for elastic bodies. The latter assumption implies that  $\mathrm {Cau} \ll 1$, which physically means that the body is weakly elastic. We make this assumption for two reasons. First, we choose
$\mathrm {Cau} \ll 1$, which physically means that the body is weakly elastic. We make this assumption for two reasons. First, we choose  $\mathrm {Cau}$ to be small to simplify the treatment of hyperelastic materials, whose nonlinearities become mathematically challenging for
$\mathrm {Cau}$ to be small to simplify the treatment of hyperelastic materials, whose nonlinearities become mathematically challenging for  $\mathrm {Cau} \geq {O} \left ( 1 \right )$. Second, matching
$\mathrm {Cau} \geq {O} \left ( 1 \right )$. Second, matching  $\mathrm {Cau}$ with
$\mathrm {Cau}$ with  $\epsilon$ simplifies the asymptotic expansion, while preserving the practical generality of the results (for details, see supplementary material § 2 of Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a)).
$\epsilon$ simplifies the asymptotic expansion, while preserving the practical generality of the results (for details, see supplementary material § 2 of Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a)).
We then seek a perturbation series solution of (2.1) by asymptotically expanding all relevant fields in powers of  $\epsilon$. Our derivation closely follows the approach taken by Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a) for two-dimensional elastic cylinders, while augmenting it to encompass three-dimensional settings. Then, the zeroth-order solution reduces to a rigid sphere in a purely oscillatory flow governed by the unsteady Stokes equation (Lane Reference Lane1955). The first-order solution is subsequently derived in two stages. First, we obtain the deformation of the elastic body resulting from the flow field at zeroth order. Second, we incorporate the elastic feedback into the streaming solution by using the obtained body deformations as boundary conditions for the flow at
$\epsilon$. Our derivation closely follows the approach taken by Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a) for two-dimensional elastic cylinders, while augmenting it to encompass three-dimensional settings. Then, the zeroth-order solution reduces to a rigid sphere in a purely oscillatory flow governed by the unsteady Stokes equation (Lane Reference Lane1955). The first-order solution is subsequently derived in two stages. First, we obtain the deformation of the elastic body resulting from the flow field at zeroth order. Second, we incorporate the elastic feedback into the streaming solution by using the obtained body deformations as boundary conditions for the flow at  ${O} \left ( \epsilon \right )$. The steps are outlined below, with details listed in the supplementary material.
${O} \left ( \epsilon \right )$. The steps are outlined below, with details listed in the supplementary material.
We start by perturbing to  ${O} \left ( \epsilon \right )$ all physical quantities
${O} \left ( \epsilon \right )$ all physical quantities  $q$, which include
$q$, which include  ${\boldsymbol {v}}$,
${\boldsymbol {v}}$,  ${\boldsymbol {u}}$,
${\boldsymbol {u}}$,  $p$,
$p$,  $\varOmega$,
$\varOmega$,  ${\boldsymbol {n}}$,
${\boldsymbol {n}}$,  ${\boldsymbol {t}}$, as
${\boldsymbol {t}}$, as
 \begin{equation} q \sim q_0 + \epsilon q_1 + \mathcal{O} (\epsilon^2) \end{equation}
\begin{equation} q \sim q_0 + \epsilon q_1 + \mathcal{O} (\epsilon^2) \end{equation}
and substitute them into the governing equations (2.1) and boundary conditions (2.2)–(2.5). Steps are explicitly reported in the supplementary material (equations (1.17)–(1.26)), where subscripts ( $0, 1,\ldots$) refer to the solution order. We remark that the zeroth order
$0, 1,\ldots$) refer to the solution order. We remark that the zeroth order  $q_0$ of quantities non-dimensionalized by
$q_0$ of quantities non-dimensionalized by  $V=\epsilon a \omega$ corresponds to order
$V=\epsilon a \omega$ corresponds to order  ${O} \left ( \epsilon \right )$ in dimensional form. Thus, our expansion remains consistent with previous examples of streaming literature (Longuet-Higgins Reference Longuet-Higgins1998; Spelman & Lauga Reference Spelman and Lauga2017) where enumeration starts from the first order (supplementary material, equation (1.17)). Next, we adopt the geometrically convenient spherical coordinate system
${O} \left ( \epsilon \right )$ in dimensional form. Thus, our expansion remains consistent with previous examples of streaming literature (Longuet-Higgins Reference Longuet-Higgins1998; Spelman & Lauga Reference Spelman and Lauga2017) where enumeration starts from the first order (supplementary material, equation (1.17)). Next, we adopt the geometrically convenient spherical coordinate system  $(r, \theta, \phi )$, with radial coordinate
$(r, \theta, \phi )$, with radial coordinate  $r$, polar angle
$r$, polar angle  $\theta$, azimuthal angle
$\theta$, azimuthal angle  $\phi$ and origin at the centre of the sphere. The horizontal axis direction
$\phi$ and origin at the centre of the sphere. The horizontal axis direction  ${\boldsymbol {i}}$ corresponds to
${\boldsymbol {i}}$ corresponds to  $\theta = 0$.
$\theta = 0$.
3.1. Zeroth-order  ${O} \left ( 1 \right )$ solution
${O} \left ( 1 \right )$ solution

The governing equations and boundary conditions in the solid phase at zeroth order  ${O} \left ( 1 \right )$ simplify to
${O} \left ( 1 \right )$ simplify to
 \begin{equation} {\boldsymbol{\nabla}} \boldsymbol{\cdot} (({\boldsymbol{\mathsf{I}}} + {\boldsymbol{\nabla}} {\boldsymbol{u}}_0) ({\boldsymbol{\mathsf{I}}} + {\boldsymbol{\nabla}} {\boldsymbol{u}}_0)^{\rm T})' = 0, \quad r \leq 1;\ {\boldsymbol{u}}_0|_{r = \zeta} = 0, \end{equation}
\begin{equation} {\boldsymbol{\nabla}} \boldsymbol{\cdot} (({\boldsymbol{\mathsf{I}}} + {\boldsymbol{\nabla}} {\boldsymbol{u}}_0) ({\boldsymbol{\mathsf{I}}} + {\boldsymbol{\nabla}} {\boldsymbol{u}}_0)^{\rm T})' = 0, \quad r \leq 1;\ {\boldsymbol{u}}_0|_{r = \zeta} = 0, \end{equation}
where  $\zeta = b / a$ is the non-dimensional radius of the pinned zone. Since at this order
$\zeta = b / a$ is the non-dimensional radius of the pinned zone. Since at this order  $\mathrm {Cau} = \kappa \epsilon = 0$, the solution of (3.2) physically corresponds to a fixed, rigid sphere with
$\mathrm {Cau} = \kappa \epsilon = 0$, the solution of (3.2) physically corresponds to a fixed, rigid sphere with
 \begin{equation} \partial\varOmega_0 = r = 1;\quad {\boldsymbol{u}}_0 = 0,\quad {\boldsymbol{v}}_{0} = \frac{\partial {\boldsymbol{u}}_0}{\partial t} = 0 ,\quad r \leq 1. \end{equation}
\begin{equation} \partial\varOmega_0 = r = 1;\quad {\boldsymbol{u}}_0 = 0,\quad {\boldsymbol{v}}_{0} = \frac{\partial {\boldsymbol{u}}_0}{\partial t} = 0 ,\quad r \leq 1. \end{equation}Thus the fluid-phase governing equations and boundary conditions reduce to
 \begin{equation} \left. \begin{gathered} M^2 \frac{\partial {\nabla}^2 {\boldsymbol{\varphi}}_0}{\partial t} = {\nabla}^4 {\boldsymbol{\varphi}}_{0}\quad r \geq 1, \\ v_{0,r}|_{r = 1} = \left.\frac{1}{r \sin\theta} \frac{\partial (\varphi_0 \sin\theta)}{\partial \theta}\right|_{r = 1} = 0;\quad v_{0, \theta}|_{r = 1} = \left.-\frac{1}{r} \frac{\partial (r \varphi_0)}{\partial r}\right|_{r = 1} = 0, \\ v_{0, r}|_{r \to \infty} = \cos \theta \cos t ;\quad v_{0, \theta}|_{r \to \infty} ={-}\sin \theta \cos t, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} M^2 \frac{\partial {\nabla}^2 {\boldsymbol{\varphi}}_0}{\partial t} = {\nabla}^4 {\boldsymbol{\varphi}}_{0}\quad r \geq 1, \\ v_{0,r}|_{r = 1} = \left.\frac{1}{r \sin\theta} \frac{\partial (\varphi_0 \sin\theta)}{\partial \theta}\right|_{r = 1} = 0;\quad v_{0, \theta}|_{r = 1} = \left.-\frac{1}{r} \frac{\partial (r \varphi_0)}{\partial r}\right|_{r = 1} = 0, \\ v_{0, r}|_{r \to \infty} = \cos \theta \cos t ;\quad v_{0, \theta}|_{r \to \infty} ={-}\sin \theta \cos t, \end{gathered} \right\} \end{equation}
where  ${\boldsymbol {\varphi }} = \varphi {\boldsymbol {\hat {\phi }}}$ is the vector potential defined as
${\boldsymbol {\varphi }} = \varphi {\boldsymbol {\hat {\phi }}}$ is the vector potential defined as  ${\boldsymbol {v}} = {\boldsymbol {\nabla }} \times {\boldsymbol {\varphi }}$, with
${\boldsymbol {v}} = {\boldsymbol {\nabla }} \times {\boldsymbol {\varphi }}$, with  ${\boldsymbol {\hat {\phi }}}$ being the unit vector in the azimuthal direction. We note that
${\boldsymbol {\hat {\phi }}}$ being the unit vector in the azimuthal direction. We note that  ${\nabla }^2$ refers to the vector Laplacian operator, which is distinct from the scalar Laplacian operator in spherical coordinates. This system ((3.3) and (3.4)) defines a rigid sphere immersed in an oscillating unsteady Stokes flow, which has an exact analytical solution (Lane Reference Lane1955):
${\nabla }^2$ refers to the vector Laplacian operator, which is distinct from the scalar Laplacian operator in spherical coordinates. This system ((3.3) and (3.4)) defines a rigid sphere immersed in an oscillating unsteady Stokes flow, which has an exact analytical solution (Lane Reference Lane1955):
 \begin{equation} \varphi_0 ={-}\frac{\sin\theta}{4} \left( 3\frac{h_1(mr)}{mh_0(m)} - r - \frac{h_2(m)}{r^2 h_0(m)} \right) {\rm e}^{-{\rm i}t} + {\rm c.c.} ,\quad r \geq 1, \end{equation}
\begin{equation} \varphi_0 ={-}\frac{\sin\theta}{4} \left( 3\frac{h_1(mr)}{mh_0(m)} - r - \frac{h_2(m)}{r^2 h_0(m)} \right) {\rm e}^{-{\rm i}t} + {\rm c.c.} ,\quad r \geq 1, \end{equation}
where  ${\rm i} = \sqrt {-1}$ and
${\rm i} = \sqrt {-1}$ and  $m = \sqrt {{\rm i}} M$. Here,
$m = \sqrt {{\rm i}} M$. Here,  $h_n$ and
$h_n$ and  ${\rm c.c.}$ refer to the
${\rm c.c.}$ refer to the  $n{\textrm {th}}$-order spherical Hankel function of the first kind and complex conjugate, respectively. As observed in Lane (Reference Lane1955), the zeroth-order vector potential field
$n{\textrm {th}}$-order spherical Hankel function of the first kind and complex conjugate, respectively. As observed in Lane (Reference Lane1955), the zeroth-order vector potential field  ${\boldsymbol {\varphi }}_0$ in the fluid phase is purely oscillatory in time, and thus no steady streaming appears at this order. Moreover, the flow at
${\boldsymbol {\varphi }}_0$ in the fluid phase is purely oscillatory in time, and thus no steady streaming appears at this order. Moreover, the flow at  ${O} \left ( 1 \right )$ is unaffected by elasticity.
${O} \left ( 1 \right )$ is unaffected by elasticity.
3.2. First-order ${O} \left ( \epsilon \right )$ solution

We then proceed to the next order approximation  ${O} \left ( \epsilon \right )$, where we expect time-independent steady streaming to emerge (Lane Reference Lane1955). At
${O} \left ( \epsilon \right )$, where we expect time-independent steady streaming to emerge (Lane Reference Lane1955). At  ${O} \left ( \epsilon \right )$, the solid governing equations reduce (supplementary material, equations (1.38)–(1.42), (1.50)) to the homogeneous biharmonic equation:
${O} \left ( \epsilon \right )$, the solid governing equations reduce (supplementary material, equations (1.38)–(1.42), (1.50)) to the homogeneous biharmonic equation:
 \begin{equation} {\nabla}^4 {\boldsymbol{\varphi}}_{e,1} = 0,\quad {\boldsymbol{x}}\in\varOmega_{e}, \end{equation}
\begin{equation} {\nabla}^4 {\boldsymbol{\varphi}}_{e,1} = 0,\quad {\boldsymbol{x}}\in\varOmega_{e}, \end{equation}
where we have defined the strain function  ${\boldsymbol {\varphi }}_{e} = \varphi _e \hat {{\boldsymbol {\phi }}}$ similar to the fluid phase, so that the displacement field is
${\boldsymbol {\varphi }}_{e} = \varphi _e \hat {{\boldsymbol {\phi }}}$ similar to the fluid phase, so that the displacement field is  ${\boldsymbol {u}} = {\boldsymbol {\nabla }} \times {\boldsymbol {\varphi }}_{e}$. Equation (3.6) demonstrates how the specific choice of solid elasticity model used at
${\boldsymbol {u}} = {\boldsymbol {\nabla }} \times {\boldsymbol {\varphi }}_{e}$. Equation (3.6) demonstrates how the specific choice of solid elasticity model used at  ${O} \left ( \epsilon \right )$ becomes irrelevant, since all nonlinear stress–strain responses drop out as a result of linearization (supplementary material, equations (1.38)–(1.42)). Equation (3.6) is complemented by the Dirichlet boundary conditions at the pinned zone interface:
${O} \left ( \epsilon \right )$ becomes irrelevant, since all nonlinear stress–strain responses drop out as a result of linearization (supplementary material, equations (1.38)–(1.42)). Equation (3.6) is complemented by the Dirichlet boundary conditions at the pinned zone interface:
 \begin{equation} u_{1, r} = \left. \frac{1}{r \sin\theta} \frac{\partial (\varphi_{e,1} \sin\theta)}{\partial \theta} \right|_{r = \zeta} = 0;\quad u_{1, \theta} = \left. -\frac{1}{r} \frac{\partial (r \varphi_{e,1})}{\partial r} \right|_{r = \zeta} = 0. \end{equation}
\begin{equation} u_{1, r} = \left. \frac{1}{r \sin\theta} \frac{\partial (\varphi_{e,1} \sin\theta)}{\partial \theta} \right|_{r = \zeta} = 0;\quad u_{1, \theta} = \left. -\frac{1}{r} \frac{\partial (r \varphi_{e,1})}{\partial r} \right|_{r = \zeta} = 0. \end{equation}
Additionally, in accordance with (2.4), the  ${O} \left ( 1 \right )$ flow solution exerts interfacial stresses on the solid, which at
${O} \left ( 1 \right )$ flow solution exerts interfacial stresses on the solid, which at  ${O} \left ( \epsilon \right )$ is no longer rigid but instead deformable. This results in the following boundary conditions for the radial and tangential stresses at the interface
${O} \left ( \epsilon \right )$ is no longer rigid but instead deformable. This results in the following boundary conditions for the radial and tangential stresses at the interface  $\partial \varOmega _0$:
$\partial \varOmega _0$:
 \begin{equation} \left. \begin{gathered} \frac{M^2}{\kappa} \left.\frac{\partial u_{1,r}}{\partial r}\right|_{r = 1} = \left.\frac{\partial v_{0,r}}{\partial r}\right|_{r = 1},\\ \frac{M^2}{\kappa} \left. \left( \frac{1}{r} \frac{\partial u_{1,r}}{\partial \theta} + \frac{\partial u_{1,\theta}}{\partial r} - \frac{u_{1,\theta}}{r} \right) \right|_{r = 1} = \left. \left( \frac{1}{r}\frac{\partial v_{0,r}}{\partial \theta} + \frac{\partial v_{0,\theta}}{\partial r} - \frac{v_{0,\theta}}{r} \right) \right|_{r = 1}, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} \frac{M^2}{\kappa} \left.\frac{\partial u_{1,r}}{\partial r}\right|_{r = 1} = \left.\frac{\partial v_{0,r}}{\partial r}\right|_{r = 1},\\ \frac{M^2}{\kappa} \left. \left( \frac{1}{r} \frac{\partial u_{1,r}}{\partial \theta} + \frac{\partial u_{1,\theta}}{\partial r} - \frac{u_{1,\theta}}{r} \right) \right|_{r = 1} = \left. \left( \frac{1}{r}\frac{\partial v_{0,r}}{\partial \theta} + \frac{\partial v_{0,\theta}}{\partial r} - \frac{v_{0,\theta}}{r} \right) \right|_{r = 1}, \end{gathered} \right\} \end{equation}
where the left-hand side corresponds to the elastic stresses in the solid phase ( $({M^2}/{\mathrm {Cau}})({\boldsymbol{\mathsf{F}}} {\boldsymbol{\mathsf{F}}}^{\rm T})'$, (2.4)) and the right-hand side to the viscous stresses in the fluid phase (
$({M^2}/{\mathrm {Cau}})({\boldsymbol{\mathsf{F}}} {\boldsymbol{\mathsf{F}}}^{\rm T})'$, (2.4)) and the right-hand side to the viscous stresses in the fluid phase ( ${\boldsymbol {\nabla }} {\boldsymbol {v}} + {\boldsymbol {\nabla }} {\boldsymbol {v}}^{\rm T}$, (2.4)), both evaluated at the zeroth-order interface
${\boldsymbol {\nabla }} {\boldsymbol {v}} + {\boldsymbol {\nabla }} {\boldsymbol {v}}^{\rm T}$, (2.4)), both evaluated at the zeroth-order interface  $r = 1$. The pressure term (
$r = 1$. The pressure term ( $-p{\boldsymbol{\mathsf{I}}}$, (2.4)) cancels out due to pressure continuity at the interface, hence its absence in (3.8) (supplementary material, equation (1.31)). We point out that the use of
$-p{\boldsymbol{\mathsf{I}}}$, (2.4)) cancels out due to pressure continuity at the interface, hence its absence in (3.8) (supplementary material, equation (1.31)). We point out that the use of  $r = 1$ in (3.8) is consistent despite the fact that the solid interface deforms at this order. Indeed, as demonstrated in Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a) and supplementary material equations (1.44)–(1.47), errors associated with the
$r = 1$ in (3.8) is consistent despite the fact that the solid interface deforms at this order. Indeed, as demonstrated in Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a) and supplementary material equations (1.44)–(1.47), errors associated with the  $r=1$ approximation all appear at the higher order
$r=1$ approximation all appear at the higher order  ${O} \left ( \epsilon ^2 \right )$ and thus do not affect our solution. In addition, we note that the viscous stress term (
${O} \left ( \epsilon ^2 \right )$ and thus do not affect our solution. In addition, we note that the viscous stress term ( $\beta ({\boldsymbol {\nabla }} {\boldsymbol {v}} + {\boldsymbol {\nabla }} {\boldsymbol {v}}^{\rm T})$, (2.4)) is also of higher order
$\beta ({\boldsymbol {\nabla }} {\boldsymbol {v}} + {\boldsymbol {\nabla }} {\boldsymbol {v}}^{\rm T})$, (2.4)) is also of higher order  ${O} \left ( \epsilon ^2 \right )$ and thus absent in (3.8), implying that the specific choice of viscosity model is irrelevant at
${O} \left ( \epsilon ^2 \right )$ and thus absent in (3.8), implying that the specific choice of viscosity model is irrelevant at  ${O} \left ( \epsilon \right )$. Next, we use the
${O} \left ( \epsilon \right )$. Next, we use the  ${O} \left ( 1 \right )$ flow velocity at the interface, (3.4) and (3.5), to directly evaluate the right-hand side of (3.8):
${O} \left ( 1 \right )$ flow velocity at the interface, (3.4) and (3.5), to directly evaluate the right-hand side of (3.8):
 \begin{equation} \left. \begin{gathered} \left.\frac{\partial v_{0,r}}{\partial r}\right|_{r = 1} = 0 ,\\ \left.\left( \frac{1}{r}\frac{\partial v_{0,r}}{\partial \theta} + \frac{\partial v_{0,\theta}}{\partial r} - \frac{v_{0,\theta}}{r} \right)\right|_{r = 1} = \sin{\theta} F(m) {\rm e}^{-{\rm i}t} + {\rm c.c.} \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} \left.\frac{\partial v_{0,r}}{\partial r}\right|_{r = 1} = 0 ,\\ \left.\left( \frac{1}{r}\frac{\partial v_{0,r}}{\partial \theta} + \frac{\partial v_{0,\theta}}{\partial r} - \frac{v_{0,\theta}}{r} \right)\right|_{r = 1} = \sin{\theta} F(m) {\rm e}^{-{\rm i}t} + {\rm c.c.} \end{gathered} \right\} \end{equation}with
 \begin{equation} F(m) ={-}\frac{3m h_{1}(m)}{4h_0(m)}. \end{equation}
\begin{equation} F(m) ={-}\frac{3m h_{1}(m)}{4h_0(m)}. \end{equation}
With the boundary conditions (3.7)–(3.10) resolved, the homogeneous biharmonic (3.6) can be solved exactly to obtain the  ${O} \left ( \epsilon \right )$ solid strain function:
${O} \left ( \epsilon \right )$ solid strain function:
 \begin{equation} \varphi_{e,1} = \frac{\kappa}{M^2} \sin{\theta} \left( c_1 r + \frac{c_2}{r^2} + c_3 r^3 + c_4 \right) F(m) {\rm e}^{-{\rm i}t} + {\rm c.c.}, \end{equation}
\begin{equation} \varphi_{e,1} = \frac{\kappa}{M^2} \sin{\theta} \left( c_1 r + \frac{c_2}{r^2} + c_3 r^3 + c_4 \right) F(m) {\rm e}^{-{\rm i}t} + {\rm c.c.}, \end{equation}
where the exact expressions for  $c_1, c_2, c_3, c_4$ (functions of
$c_1, c_2, c_3, c_4$ (functions of  $\zeta$) are reported in the supplementary material (equation (1.57)). The
$\zeta$) are reported in the supplementary material (equation (1.57)). The  ${O} \left ( \epsilon \right )$ solid displacement field
${O} \left ( \epsilon \right )$ solid displacement field  ${\boldsymbol {u}}_1$, both in the bulk
${\boldsymbol {u}}_1$, both in the bulk  $\varOmega _e$ and at the boundary
$\varOmega _e$ and at the boundary  $\partial \varOmega$, can then be directly obtained from (3.11). This, in turn, kinematically affects the flow at
$\partial \varOmega$, can then be directly obtained from (3.11). This, in turn, kinematically affects the flow at  ${O} \left ( \epsilon \right )$ via the interfacial boundary conditions, as we will see.
${O} \left ( \epsilon \right )$ via the interfacial boundary conditions, as we will see.
The flow governing equation at  ${O} \left ( \epsilon \right )$, in vector potential form, reads
${O} \left ( \epsilon \right )$, in vector potential form, reads
 \begin{equation} M^2 \frac{\partial {\nabla}^2 {\boldsymbol{\varphi}}_1}{\partial t} + M^2 \left( \left( {\boldsymbol{v}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} \right) {\nabla}^2 {\boldsymbol{\varphi}}_0 \right) - M^2 \left( ( {\nabla}^2 {\boldsymbol{\varphi}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} ) {\boldsymbol{v}}_0 \right) = {\nabla}^4 {\boldsymbol{\varphi}}_{1},\quad r \geq 1. \end{equation}
\begin{equation} M^2 \frac{\partial {\nabla}^2 {\boldsymbol{\varphi}}_1}{\partial t} + M^2 \left( \left( {\boldsymbol{v}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} \right) {\nabla}^2 {\boldsymbol{\varphi}}_0 \right) - M^2 \left( ( {\nabla}^2 {\boldsymbol{\varphi}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} ) {\boldsymbol{v}}_0 \right) = {\nabla}^4 {\boldsymbol{\varphi}}_{1},\quad r \geq 1. \end{equation}
We note that the term  $M^2 ({\nabla }^2{\boldsymbol {\varphi }}_0 \boldsymbol{\cdot} {\boldsymbol {\nabla }}){\boldsymbol {v}}_0$ in (3.12), which corresponds to vortex stretching, is absent in the rigid-sphere streaming derivation of Lane (Reference Lane1955). By considering this unaccounted term, our work improves upon the existing theory, as demonstrated in § 4.
$M^2 ({\nabla }^2{\boldsymbol {\varphi }}_0 \boldsymbol{\cdot} {\boldsymbol {\nabla }}){\boldsymbol {v}}_0$ in (3.12), which corresponds to vortex stretching, is absent in the rigid-sphere streaming derivation of Lane (Reference Lane1955). By considering this unaccounted term, our work improves upon the existing theory, as demonstrated in § 4.
Next, since we are interested in steady streaming, we consider the time-averaged form of (3.12):
 \begin{equation} {\nabla}^4 \langle {\boldsymbol{\varphi}}_{1} \rangle = M^2 \underbrace{\langle \left( {\boldsymbol{v}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} \right) {\nabla}^2 {\boldsymbol{\varphi}}_0 - ( {\nabla}^2 {\boldsymbol{\varphi}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} ) {\boldsymbol{v}}_0 \rangle}_{\textit{right-hand side}},\quad r \geq 1, \end{equation}
\begin{equation} {\nabla}^4 \langle {\boldsymbol{\varphi}}_{1} \rangle = M^2 \underbrace{\langle \left( {\boldsymbol{v}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} \right) {\nabla}^2 {\boldsymbol{\varphi}}_0 - ( {\nabla}^2 {\boldsymbol{\varphi}}_0 \boldsymbol{\cdot} {\boldsymbol{\nabla}} ) {\boldsymbol{v}}_0 \rangle}_{\textit{right-hand side}},\quad r \geq 1, \end{equation}where we substitute (3.5) into the right-hand side to yield
 \begin{equation} \left. \begin{gathered} {\nabla}^4 \langle {\boldsymbol{\varphi}}_{1} \rangle = \sin 2 \theta \rho(r) {\boldsymbol{\hat{{\phi}}}},\quad r \geq 1,\\ \rho(r) = \frac{M^2}{16r^4} \left( r^3J^{(3)} + r^2 J^{(2)}-6r J^{(1)} + 6J \right)J^* + {\rm c.c.},\\ J(r) = 3\frac{h_1(mr)}{mh_0(m)} - r - \frac{h_2(m)}{r^2 h_0(m)}. \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} {\nabla}^4 \langle {\boldsymbol{\varphi}}_{1} \rangle = \sin 2 \theta \rho(r) {\boldsymbol{\hat{{\phi}}}},\quad r \geq 1,\\ \rho(r) = \frac{M^2}{16r^4} \left( r^3J^{(3)} + r^2 J^{(2)}-6r J^{(1)} + 6J \right)J^* + {\rm c.c.},\\ J(r) = 3\frac{h_1(mr)}{mh_0(m)} - r - \frac{h_2(m)}{r^2 h_0(m)}. \end{gathered} \right\} \end{equation}
Here,  $J$ is the radially dependent term of (3.5), with
$J$ is the radially dependent term of (3.5), with  $J^{(n)}$ and
$J^{(n)}$ and  $J^*$ being its
$J^*$ being its  $n{\text {th}}$ derivative and complex conjugate, respectively. Solving this inhomogeneous biharmonic equation requires four independent boundary conditions. The first two are the radial and tangential, time-averaged, far-field velocity:
$n{\text {th}}$ derivative and complex conjugate, respectively. Solving this inhomogeneous biharmonic equation requires four independent boundary conditions. The first two are the radial and tangential, time-averaged, far-field velocity:
 \begin{equation} \left.\frac{1}{r \sin\theta} \frac{\partial (\langle \varphi_1 \rangle \sin\theta)}{\partial \theta}\right|_{r \to \infty} = \left.\frac{1}{r} \frac{\partial (r \langle \varphi_1 \rangle)}{\partial r}\right|_{r \to \infty} = 0. \end{equation}
\begin{equation} \left.\frac{1}{r \sin\theta} \frac{\partial (\langle \varphi_1 \rangle \sin\theta)}{\partial \theta}\right|_{r \to \infty} = \left.\frac{1}{r} \frac{\partial (r \langle \varphi_1 \rangle)}{\partial r}\right|_{r \to \infty} = 0. \end{equation}
Next, we recall the no-slip boundary condition of (2.3) that needs to be enforced at the  ${O} \left ( \epsilon \right )$-accurate solid–fluid interface:
${O} \left ( \epsilon \right )$-accurate solid–fluid interface:
 \begin{equation} \left. {\boldsymbol{v}}_{e} \right|_{\partial \varOmega} = \left. {\boldsymbol{v}}_{e} \right|_{r = 1 + \epsilon u_{1, r}} + \mathcal{O} (\epsilon^2) = \left. {\boldsymbol{v}}_{f} \right|_{\partial \varOmega} =\left. {\boldsymbol{v}}_{f} \right|_{r = 1 + \epsilon u_{1, r}} + \mathcal{O} (\epsilon^2). \end{equation}
\begin{equation} \left. {\boldsymbol{v}}_{e} \right|_{\partial \varOmega} = \left. {\boldsymbol{v}}_{e} \right|_{r = 1 + \epsilon u_{1, r}} + \mathcal{O} (\epsilon^2) = \left. {\boldsymbol{v}}_{f} \right|_{\partial \varOmega} =\left. {\boldsymbol{v}}_{f} \right|_{r = 1 + \epsilon u_{1, r}} + \mathcal{O} (\epsilon^2). \end{equation}
We note that the sphere interface at  ${O} \left ( \epsilon \right )$ deforms as
${O} \left ( \epsilon \right )$ deforms as  $r' = 1 + \epsilon u_{1, r}$, where
$r' = 1 + \epsilon u_{1, r}$, where  $u_{1, r}$ is the radial component of the
$u_{1, r}$ is the radial component of the  ${O} \left ( \epsilon \right )$-accurate displacement field obtained by taking the curl of the strain function
${O} \left ( \epsilon \right )$-accurate displacement field obtained by taking the curl of the strain function  ${\boldsymbol {u}}_1 = {\boldsymbol {\nabla }} \times {\boldsymbol {\varphi }}_{e,1}$. Similar to Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a), we enforce the no-slip boundary condition in (3.16) by deploying the technique presented in Longuet-Higgins (Reference Longuet-Higgins1998), where
${\boldsymbol {u}}_1 = {\boldsymbol {\nabla }} \times {\boldsymbol {\varphi }}_{e,1}$. Similar to Bhosale et al. (Reference Bhosale, Parthasarathy and Gazzola2022a), we enforce the no-slip boundary condition in (3.16) by deploying the technique presented in Longuet-Higgins (Reference Longuet-Higgins1998), where  ${\boldsymbol {v}}_{f} |_{r = r'}$ is Taylor-expanded about
${\boldsymbol {v}}_{f} |_{r = r'}$ is Taylor-expanded about  $r = 1$ (supplementary material, equations (1.65)–(1.67)):
$r = 1$ (supplementary material, equations (1.65)–(1.67)):
 \begin{equation} \left. {\boldsymbol{v}}_{f} \right|_{r = 1 + \epsilon u_{1,r}} = \left. \left( {\boldsymbol{v}}_{f,1} + \epsilon \frac{\partial {\boldsymbol{v}}_{f,0}}{\partial r} u_{1,r} \right) \right|_{r = 1} + \mathcal{O} (\epsilon^2). \end{equation}
\begin{equation} \left. {\boldsymbol{v}}_{f} \right|_{r = 1 + \epsilon u_{1,r}} = \left. \left( {\boldsymbol{v}}_{f,1} + \epsilon \frac{\partial {\boldsymbol{v}}_{f,0}}{\partial r} u_{1,r} \right) \right|_{r = 1} + \mathcal{O} (\epsilon^2). \end{equation}
The boundary solid velocity  ${\boldsymbol {v}}_{e} |_{r = 1 + \epsilon u_{1, r}}$ (left-hand side of (3.16)) can be instead computed to
${\boldsymbol {v}}_{e} |_{r = 1 + \epsilon u_{1, r}}$ (left-hand side of (3.16)) can be instead computed to  ${O} \left ( \epsilon \right )$ accuracy as
${O} \left ( \epsilon \right )$ accuracy as  $\partial u_{1,r} / \partial t |_{r = 1}$ (supplementary material, equation (1.64)). We note that both
$\partial u_{1,r} / \partial t |_{r = 1}$ (supplementary material, equation (1.64)). We note that both  $u_{1,r}$ and
$u_{1,r}$ and  $\partial {\boldsymbol {v}}_{f,0} / \partial r$ are known from (3.11) and (3.5). Thus, the
$\partial {\boldsymbol {v}}_{f,0} / \partial r$ are known from (3.11) and (3.5). Thus, the  ${O} \left ( \epsilon \right )$ flow velocity
${O} \left ( \epsilon \right )$ flow velocity  ${\boldsymbol {v}}_{f,1}$ at
${\boldsymbol {v}}_{f,1}$ at  $r = 1$, denoted by
$r = 1$, denoted by  ${\boldsymbol {v}}_{1}$ henceforth, can be obtained by substituting (3.17) into (3.16) (supplementary material, equations (1.63)–(1.68)). Time averaging then yields the remaining two boundary conditions for (3.14):
${\boldsymbol {v}}_{1}$ henceforth, can be obtained by substituting (3.17) into (3.16) (supplementary material, equations (1.63)–(1.68)). Time averaging then yields the remaining two boundary conditions for (3.14):
 \begin{equation} \left. \begin{gathered} \left. \langle v_{1, r} \rangle \right|_{r = 1} = \left. \frac{1}{r \sin\theta} \frac{\partial (\langle \varphi_1 \rangle \sin\theta)}{\partial \theta}\right|_{r = 1} = 0,\\ \left. \langle v_{1, \theta} \rangle \right|_{r = 1} ={-}\left.\frac{1}{r}\frac{\partial (r\langle \varphi_1 \rangle)}{\partial r}\right|_{r = 1} ={-}\frac{\kappa}{M^2} \sin 2 \theta G_1(\zeta) F(m) F^*(m) \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} \left. \langle v_{1, r} \rangle \right|_{r = 1} = \left. \frac{1}{r \sin\theta} \frac{\partial (\langle \varphi_1 \rangle \sin\theta)}{\partial \theta}\right|_{r = 1} = 0,\\ \left. \langle v_{1, \theta} \rangle \right|_{r = 1} ={-}\left.\frac{1}{r}\frac{\partial (r\langle \varphi_1 \rangle)}{\partial r}\right|_{r = 1} ={-}\frac{\kappa}{M^2} \sin 2 \theta G_1(\zeta) F(m) F^*(m) \end{gathered} \right\} \end{equation}with
 \begin{equation} G_1(\zeta) = \frac{(\zeta - 1)^2(4\zeta^2 + 7\zeta + 4)}{3\zeta(2\zeta^3 + 4\zeta^2 + 6\zeta + 3)}. \end{equation}
\begin{equation} G_1(\zeta) = \frac{(\zeta - 1)^2(4\zeta^2 + 7\zeta + 4)}{3\zeta(2\zeta^3 + 4\zeta^2 + 6\zeta + 3)}. \end{equation}
Equation (3.18) physically implies a rectified tangential slip velocity ( $\langle v_{1, \theta } \rangle |_{r = 1} \neq 0$) in the fluid phase at the zeroth-order fixed interface
$\langle v_{1, \theta } \rangle |_{r = 1} \neq 0$) in the fluid phase at the zeroth-order fixed interface  $r = 1$. This slip velocity captures the effect of body elastic deformation (
$r = 1$. This slip velocity captures the effect of body elastic deformation ( $\langle v_{1, \theta } \rangle |_{r = 1} = 0$ for rigid bodies) by equivalently modifying the fluid Reynolds stresses (
$\langle v_{1, \theta } \rangle |_{r = 1} = 0$ for rigid bodies) by equivalently modifying the fluid Reynolds stresses ( $\sin 2\theta \rho (r)$ in (3.14)), thus impacting the resulting streaming flow. We further remark that, in contrast to rigid-body streaming, such modification is accessible even in the Stokes limit as it is independent of the Navier–Stokes nonlinear inertial advection, a conclusion similarly drawn in our previous work on two-dimensional soft-cylinder streaming (Bhosale et al. Reference Bhosale, Parthasarathy and Gazzola2022a). This phenomenon shares characteristics with the artificial mixed-mode streaming of pulsating bubbles (Longuet-Higgins Reference Longuet-Higgins1998; Spelman & Lauga Reference Spelman and Lauga2017), whereas the streaming process derived here arises spontaneously from the coupling between viscous fluid and elastic solid.
$\sin 2\theta \rho (r)$ in (3.14)), thus impacting the resulting streaming flow. We further remark that, in contrast to rigid-body streaming, such modification is accessible even in the Stokes limit as it is independent of the Navier–Stokes nonlinear inertial advection, a conclusion similarly drawn in our previous work on two-dimensional soft-cylinder streaming (Bhosale et al. Reference Bhosale, Parthasarathy and Gazzola2022a). This phenomenon shares characteristics with the artificial mixed-mode streaming of pulsating bubbles (Longuet-Higgins Reference Longuet-Higgins1998; Spelman & Lauga Reference Spelman and Lauga2017), whereas the streaming process derived here arises spontaneously from the coupling between viscous fluid and elastic solid.
Given the steady flow of (3.14) and boundary conditions of (3.15) and (3.18), the streaming solution can finally be written as
 \begin{equation} \langle \varphi_1 \rangle = \sin 2 \theta \left[ \varTheta(r) + \varLambda(r) \right], \end{equation}
\begin{equation} \langle \varphi_1 \rangle = \sin 2 \theta \left[ \varTheta(r) + \varLambda(r) \right], \end{equation}
where  $\varTheta (r)$ is the rectified rigid-body solution:
$\varTheta (r)$ is the rectified rigid-body solution:
 \begin{align} \varTheta(r) &={-}\frac{r^{4}}{70} \int_{r}^{\infty} \frac{\rho(\tau)}{\tau} \, \mathrm{d} \tau + \frac{r^{2}}{30} \int_{r}^{\infty} \tau \rho(\tau) \, \mathrm{d} \tau\nonumber\\ &\quad+ \frac{1}{r}\left( \frac{1}{30} \int_{1}^{r} \tau^{4} \rho(\tau) \, \mathrm{d} \tau + \frac{1}{20} \int_{1}^{\infty} \frac{\rho(\tau)}{\tau} \, \mathrm{d} \tau - \frac{1}{12} \int_{1}^{\infty} \tau \rho(\tau) \, \mathrm{d} \tau\right)\nonumber\\ &\quad+ \frac{1}{r^{3}}\left(-\frac{1}{70} \int_{1}^{r} \tau^{6} \rho(\tau) \, \mathrm{d} \tau - \frac{1}{28} \int_{1}^{\infty} \frac{\rho(\tau)}{\tau} \, \mathrm{d} \tau + \frac{1}{20} \int_{1}^{\infty} \tau \rho(\tau) \, \mathrm{d} \tau\right) \end{align}
\begin{align} \varTheta(r) &={-}\frac{r^{4}}{70} \int_{r}^{\infty} \frac{\rho(\tau)}{\tau} \, \mathrm{d} \tau + \frac{r^{2}}{30} \int_{r}^{\infty} \tau \rho(\tau) \, \mathrm{d} \tau\nonumber\\ &\quad+ \frac{1}{r}\left( \frac{1}{30} \int_{1}^{r} \tau^{4} \rho(\tau) \, \mathrm{d} \tau + \frac{1}{20} \int_{1}^{\infty} \frac{\rho(\tau)}{\tau} \, \mathrm{d} \tau - \frac{1}{12} \int_{1}^{\infty} \tau \rho(\tau) \, \mathrm{d} \tau\right)\nonumber\\ &\quad+ \frac{1}{r^{3}}\left(-\frac{1}{70} \int_{1}^{r} \tau^{6} \rho(\tau) \, \mathrm{d} \tau - \frac{1}{28} \int_{1}^{\infty} \frac{\rho(\tau)}{\tau} \, \mathrm{d} \tau + \frac{1}{20} \int_{1}^{\infty} \tau \rho(\tau) \, \mathrm{d} \tau\right) \end{align}
and  $\varLambda (r)$ is the new elastic modification:
$\varLambda (r)$ is the new elastic modification:
 \begin{equation} \varLambda(r) = 0.5 \frac{\kappa}{M^2} ~ G_1(\zeta) F(m) F^*(m) \left( \frac{1}{r} - \frac{1}{r^3} \right) \end{equation}
\begin{equation} \varLambda(r) = 0.5 \frac{\kappa}{M^2} ~ G_1(\zeta) F(m) F^*(m) \left( \frac{1}{r} - \frac{1}{r^3} \right) \end{equation}
with  $G_1(\zeta )$ and
$G_1(\zeta )$ and  $F(m)$ given in (3.19) and (3.10), respectively. We note that while (3.21) is of the same form as the solution of Lane (Reference Lane1955), the explicit expression of
$F(m)$ given in (3.19) and (3.10), respectively. We note that while (3.21) is of the same form as the solution of Lane (Reference Lane1955), the explicit expression of  $\rho (r)$ is different (equation (3.14)) because of the vortex stretching term of (3.12). This concludes our theoretical analysis.
$\rho (r)$ is different (equation (3.14)) because of the vortex stretching term of (3.12). This concludes our theoretical analysis.
4. Numerical validation and extension to complex bodies
Next, we compare our theory against known experimental and analytical results in the rigidity limit (Lane Reference Lane1955; Riley Reference Riley1966; Kotas et al. Reference Kotas, Yoda and Rogers2007), as well as direct numerical simulations performed using an axisymmetric vortex-method-based formulation (Gazzola, Van Rees & Koumoutsakos Reference Gazzola, Van Rees and Koumoutsakos2012; Bhosale, Parthasarathy & Gazzola Reference Bhosale, Parthasarathy and Gazzola2021; Bhosale et al. Reference Bhosale, Upadhyay, Cui, Chan and Gazzola2023) (see also the caption of figure 2). The Stokes streamfunction pattern for a rigid sphere ( $\mathrm {Cau} = 0$) oscillating at
$\mathrm {Cau} = 0$) oscillating at  $M \approx 6$ is shown in figure 2(a). We highlight the twofold symmetry on top of the axisymmetry, and the presence of a well-defined direct circulation (DC) layer of thickness
$M \approx 6$ is shown in figure 2(a). We highlight the twofold symmetry on top of the axisymmetry, and the presence of a well-defined direct circulation (DC) layer of thickness  $\delta _{DC}$. This characteristic flow configuration, as well as the divergence of the DC layer thickness (
$\delta _{DC}$. This characteristic flow configuration, as well as the divergence of the DC layer thickness ( $\delta _{DC}\rightarrow \infty$) with increasing
$\delta _{DC}\rightarrow \infty$) with increasing  $1/M$, is consistent with Lane (Reference Lane1955) and Riley (Reference Riley1966). This qualitative behaviour is recovered by our theory at
$1/M$, is consistent with Lane (Reference Lane1955) and Riley (Reference Riley1966). This qualitative behaviour is recovered by our theory at  $\mathrm {Cau} = 0$ (grey line in figure 2d), and by simulations (black circles in figure 2d). However, we note the significant quantitative difference between the results from Lane (Reference Lane1955) (black dashed line in figure 2d) and Riley (Reference Riley1966) (purple dashed line in figure 2d) relative to our simulations/theory, which are instead found to be in close agreement with experimental results by Kotas et al. (Reference Kotas, Yoda and Rogers2007) (grey squares). In comparison with the solution of Lane (Reference Lane1955), the additional accuracy of our theory directly stems from including the vortex stretching term of (3.13), as previously discussed. In the case of the theory of Riley (Reference Riley1966), differences are rooted in the assumptions, where we consider the inertial–viscous regime
$\mathrm {Cau} = 0$ (grey line in figure 2d), and by simulations (black circles in figure 2d). However, we note the significant quantitative difference between the results from Lane (Reference Lane1955) (black dashed line in figure 2d) and Riley (Reference Riley1966) (purple dashed line in figure 2d) relative to our simulations/theory, which are instead found to be in close agreement with experimental results by Kotas et al. (Reference Kotas, Yoda and Rogers2007) (grey squares). In comparison with the solution of Lane (Reference Lane1955), the additional accuracy of our theory directly stems from including the vortex stretching term of (3.13), as previously discussed. In the case of the theory of Riley (Reference Riley1966), differences are rooted in the assumptions, where we consider the inertial–viscous regime  $M\sim {O} \left ( 1 \right )$ while Riley assumes the inertial regime
$M\sim {O} \left ( 1 \right )$ while Riley assumes the inertial regime  $M \gg 1$. A detailed description of Riley's theory and derivation is provided in supplementary material § 9. We also note that our theory is found to overpredict
$M \gg 1$. A detailed description of Riley's theory and derivation is provided in supplementary material § 9. We also note that our theory is found to overpredict  $\delta _{DC}$ (relative to simulations) at high Womersley numbers (
$\delta _{DC}$ (relative to simulations) at high Womersley numbers ( $M \approx 15$, left-hand side of figure 2d), in contrast to the quantitative agreement observed for
$M \approx 15$, left-hand side of figure 2d), in contrast to the quantitative agreement observed for  $M < 15$. We believe the reason for this deviation lies in our asymptotic assumptions, where we considered
$M < 15$. We believe the reason for this deviation lies in our asymptotic assumptions, where we considered  $M \sim {O} \left ( 1 \right )$. Thus, the applicability of our theory weakens as
$M \sim {O} \left ( 1 \right )$. Thus, the applicability of our theory weakens as  $M$ increases beyond this order. We further point out that in the regime
$M$ increases beyond this order. We further point out that in the regime  $M \approx 15$, the theories of Lane (Reference Lane1955) and Riley (Reference Riley1966) are also found to similarly struggle, with the first overpredicting and the second undepredicting the numerically obtained
$M \approx 15$, the theories of Lane (Reference Lane1955) and Riley (Reference Riley1966) are also found to similarly struggle, with the first overpredicting and the second undepredicting the numerically obtained  $\delta _{DC}$.
$\delta _{DC}$.

Figure 2. Elastic sphere and streaming flow response. (a–c) Three-dimensional time-averaged Lagrangian (i.e. Stokes-drift-corrected; supplementary material § 3) Stokes streamfunction depicting the streaming response at  $M = 6$ with increasing softness
$M = 6$ with increasing softness  $\mathrm {Cau}$. (a) Rigid limit
$\mathrm {Cau}$. (a) Rigid limit  $\mathrm {Cau} = 0$, (b)
$\mathrm {Cau} = 0$, (b)  $\mathrm {Cau} = 0.025$ and (c)
$\mathrm {Cau} = 0.025$ and (c)  $\mathrm {Cau} = 0.05$. Note that blue/orange represent clockwise/counterclockwise rotating regions. The non-dimensional radius of the pinned zone is set at
$\mathrm {Cau} = 0.05$. Note that blue/orange represent clockwise/counterclockwise rotating regions. The non-dimensional radius of the pinned zone is set at  $\zeta = 0.4$ throughout the study, to maintain the tangential slip velocity magnitude (3.18) at
$\zeta = 0.4$ throughout the study, to maintain the tangential slip velocity magnitude (3.18) at  ${O} \left ( 1 \right )$, consistent with the asymptotic analysis. The effect of pinned zone radius on streaming flow is detailed in § 4 of the supplementary material. (d) Normalized DC layer thickness (
${O} \left ( 1 \right )$, consistent with the asymptotic analysis. The effect of pinned zone radius on streaming flow is detailed in § 4 of the supplementary material. (d) Normalized DC layer thickness ( $\delta _{DC} / a$) versus inverse Womersley number (
$\delta _{DC} / a$) versus inverse Womersley number ( $1 / M$) from our theory (dots) and simulations (solid lines), for varying body elasticity
$1 / M$) from our theory (dots) and simulations (solid lines), for varying body elasticity  $\mathrm {Cau}$. Viscous streaming theories (for a rigid sphere) by Riley (Reference Riley1966) (purple dashed line) and Lane (Reference Lane1955) (black dashed line) are also reported for reference, together with experimental results (grey squares) by Kotas et al. (Reference Kotas, Yoda and Rogers2007). (e–g) Radial decay of velocity magnitude along
$\mathrm {Cau}$. Viscous streaming theories (for a rigid sphere) by Riley (Reference Riley1966) (purple dashed line) and Lane (Reference Lane1955) (black dashed line) are also reported for reference, together with experimental results (grey squares) by Kotas et al. (Reference Kotas, Yoda and Rogers2007). (e–g) Radial decay of velocity magnitude along  $\theta = 90^{\circ }$ from theory and simulations at
$\theta = 90^{\circ }$ from theory and simulations at  $M = 6$, with increasing softness
$M = 6$, with increasing softness  $\mathrm {Cau}$. (e) Rigid limit
$\mathrm {Cau}$. (e) Rigid limit  $\mathrm {Cau} = 0$, (f)
$\mathrm {Cau} = 0$, (f)  $\mathrm {Cau} = 0.0125$ and (g)
$\mathrm {Cau} = 0.0125$ and (g)  $\mathrm {Cau} = 0.025$. Additional information can be found in supplementary material § 8.
$\mathrm {Cau} = 0.025$. Additional information can be found in supplementary material § 8.
Next, as we enable solid compliance ( $\mathrm {Cau} > 0$), we observe that the twofold symmetry is preserved (
$\mathrm {Cau} > 0$), we observe that the twofold symmetry is preserved ( $\sin 2 \theta$ in (3.20)) while
$\sin 2 \theta$ in (3.20)) while  $\delta _{DC}$ contracts due to the elastic modification term
$\delta _{DC}$ contracts due to the elastic modification term  $\varLambda \neq 0$, in agreement with numerical simulations across a range of
$\varLambda \neq 0$, in agreement with numerical simulations across a range of  $\mathrm {Cau}$ (figure 2b–d). These observations are consistent with our previous work on streaming for a two-dimensional soft cylinder (Bhosale et al. Reference Bhosale, Parthasarathy and Gazzola2022a), and thus a similar, intuitive explanation exists. The flow receives feedback deformation velocities on account of the deformable sphere surface, which acts as an additional source of inertia. Since the Womersley number
$\mathrm {Cau}$ (figure 2b–d). These observations are consistent with our previous work on streaming for a two-dimensional soft cylinder (Bhosale et al. Reference Bhosale, Parthasarathy and Gazzola2022a), and thus a similar, intuitive explanation exists. The flow receives feedback deformation velocities on account of the deformable sphere surface, which acts as an additional source of inertia. Since the Womersley number  $(M)$ is the ratio between inertial and viscous forces, this is equivalent to rigid-body streaming with a larger
$(M)$ is the ratio between inertial and viscous forces, this is equivalent to rigid-body streaming with a larger  $M$, hence the decrease of DC layer thickness with increasing elasticity. This implies that an elastic body can access the streaming flow configurations of its rigid counterpart with significantly lower oscillation frequencies. Such frequency reduction is shown in figure 2(d) where, for example at
$M$, hence the decrease of DC layer thickness with increasing elasticity. This implies that an elastic body can access the streaming flow configurations of its rigid counterpart with significantly lower oscillation frequencies. Such frequency reduction is shown in figure 2(d) where, for example at  $\mathrm {Cau} = 0.05$, the same DC layer thickness is achieved at
$\mathrm {Cau} = 0.05$, the same DC layer thickness is achieved at  $\sim 2 \times$ lower frequency. Similar to rigid objects, the
$\sim 2 \times$ lower frequency. Similar to rigid objects, the  $\delta _{DC}$ of a soft sphere still diverges with decreasing
$\delta _{DC}$ of a soft sphere still diverges with decreasing  $M$, albeit at lower values, since the elastic modification
$M$, albeit at lower values, since the elastic modification  $\varLambda (r)$ does not alter the asymptotic behaviour of the rigid contribution
$\varLambda (r)$ does not alter the asymptotic behaviour of the rigid contribution  $\varTheta (r)$ (see supplementary material § 6 for details). We further note that as
$\varTheta (r)$ (see supplementary material § 6 for details). We further note that as  $\mathrm {Cau}$ increases and
$\mathrm {Cau}$ increases and  $M$ decreases, the deviation between simulations and theory grows. This follows from the fact that as
$M$ decreases, the deviation between simulations and theory grows. This follows from the fact that as  $\kappa / M^2$ in (3.18) increases, the tangential slip velocity assumed to be of
$\kappa / M^2$ in (3.18) increases, the tangential slip velocity assumed to be of  ${O} \left ( \epsilon \right )$ can exceed
${O} \left ( \epsilon \right )$ can exceed  ${O} \left ( 1 \right )$, eventually leading to the breakdown of the asymptotic analysis. We conclude our validation by showing close agreement between theoretical and simulated radially varying, time-averaged velocities
${O} \left ( 1 \right )$, eventually leading to the breakdown of the asymptotic analysis. We conclude our validation by showing close agreement between theoretical and simulated radially varying, time-averaged velocities  $\langle v \rangle$ at
$\langle v \rangle$ at  $\theta = 90^{\circ }$ (figure 2e–g). For a detailed analysis concerning the effect of inertia (
$\theta = 90^{\circ }$ (figure 2e–g). For a detailed analysis concerning the effect of inertia ( $M$) and elasticity (Cau) on velocity magnitudes (flow strength), refer to § 4 of the supplementary material.
$M$) and elasticity (Cau) on velocity magnitudes (flow strength), refer to § 4 of the supplementary material.
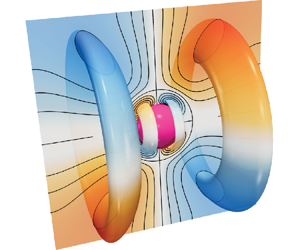
Finally, we demonstrate how gained theoretical insights translate to three-dimensional geometries characterized by multiple curvatures and distinct topology, illustrated here by means of a torus, a shape of interest due to its microfluidic properties (Chan et al. Reference Chan, Bhosale, Parthasarathy and Gazzola2022) and recent bioengineered demonstrations (Dou et al. Reference Dou, Hong, Li, Chan, Bhosale, Aydin, Juarez, Saif, Chamorro and Gazzola2022). Figure 3(a) presents the streaming flow generated for a rigid torus immersed in an oscillatory flow field at  $M \approx 4$. As can be seen, the highlighted recirculating flow features (inner/outer flow rings that may be used for particle manipulation) are weak for practical applications in the rigid limit. This can be remedied by increasing elasticity (
$M \approx 4$. As can be seen, the highlighted recirculating flow features (inner/outer flow rings that may be used for particle manipulation) are weak for practical applications in the rigid limit. This can be remedied by increasing elasticity ( $\mathrm {Cau}$), for which we indeed observe enhanced flow strengths (figure 3b,c). Finally, we highlight that to obtain a flow topology similar to that of figure 3(c), but with a rigid torus, oscillation frequencies
$\mathrm {Cau}$), for which we indeed observe enhanced flow strengths (figure 3b,c). Finally, we highlight that to obtain a flow topology similar to that of figure 3(c), but with a rigid torus, oscillation frequencies  ${\sim }4\times$ higher are necessary (supplementary material § 7), in conformity with the intuition gained via the soft-sphere streaming analysis.
${\sim }4\times$ higher are necessary (supplementary material § 7), in conformity with the intuition gained via the soft-sphere streaming analysis.

Figure 3. Extension to complex bodies. Here we consider compliance-induced streaming in a soft torus, a complex shape entailing multiple curvatures and distinct topology relative to the sphere. Numerically simulated time-averaged Eulerian flow topologies for a torus of core radius  $r$ and cross-sectional radius
$r$ and cross-sectional radius  $a = r/3$, at
$a = r/3$, at  $M \approx 4$, with varying body elasticity
$M \approx 4$, with varying body elasticity  $\mathrm {Cau}$. (a) Rigid limit
$\mathrm {Cau}$. (a) Rigid limit  $\mathrm {Cau} = 0$, (b)
$\mathrm {Cau} = 0$, (b)  $\mathrm {Cau} = 0.025$ and (c)
$\mathrm {Cau} = 0.025$ and (c)  $\mathrm {Cau} = 0.05$. The viscous fluid oscillates with velocity
$\mathrm {Cau} = 0.05$. The viscous fluid oscillates with velocity  $V(t) = \epsilon a \omega \cos \omega t$. The torus is ‘pinned’ at the centre of its circular cross-section by a rigid toroidal inclusion of radius
$V(t) = \epsilon a \omega \cos \omega t$. The torus is ‘pinned’ at the centre of its circular cross-section by a rigid toroidal inclusion of radius  $0.4a$. All other physical and simulation parameters are consistent with sphere streaming (see caption of figure 2 for details).
$0.4a$. All other physical and simulation parameters are consistent with sphere streaming (see caption of figure 2 for details).
5. Conclusion
In summary, this study improves existing three-dimensional rigid-sphere streaming theory, expands it to the case of elastic materials and further corroborates it by means of direct numerical simulations. Our work reveals, in keeping with our previous work on two-dimensional soft cylinders, an additional streaming mode accessible through material compliance and available even in Stokes flow. It further demonstrates how body elasticity strengthens streaming or enables it at significantly lower frequencies relative to rigid bodies. Finally, we show how theoretical insights extend to geometries other than the sphere, highlighting the practical generality of our theory. Overall, these findings advance our fundamental understanding of streaming flows, with potential implications in both biological and engineering domains.
Supplementary material
Supplementary material is available at https://doi.org/10.1017/jfm.2023.1050.
Funding
This work was supported by NSF CAREER grant no. CBET-1846752 (M.G.).
Declaration of interests
The authors report no conflict of interest.
Code availability
The axisymmetric flow numerical solver (Bhosale et al. Reference Bhosale, Upadhyay, Cui, Chan and Gazzola2023) used for this work is publicly available at https://github.com/GazzolaLab/PyAxisymFlow.







































 Open access
Open access