



1. Introduction
Researchers have been inspired by biology in various fields of study, continuum robots are a very clear evidence of such inspiration [Reference Webster and Jones1]. Continuum robots draw inspiration from various biological structures such as elephant trunks [Reference Zhang, Kan, Li, Wu, Wu and Peng2], octopus tentacles [Reference Qi, Qiu, Liu, Dai, Seneviratne and Althoefer3, Reference Giorelli, Renda, Calisti, Arienti, Ferri and Laschi4], snakes [Reference Kim, Cheng, Kim and Iagnemma5], and tails [Reference Rone and Ben-Tzvi6]. Continuum robots are advantageous over traditional industrial robots in terms of flexibility, lightweight, and safety [Reference Matteo, Sadati, Dong, Mohammad, Walker, Bergeles, Xu and Axinte7, Reference Kolachalama and Lakshmanan8]. Furthermore, continuum robots are promising solutions to execute tasks in very narrow spaces as they can be designed to be able to navigate through narrow holes and complicated geometries [Reference Mohammad, Russo, Fang, Dong, Axinte and Kell9, Reference Wang, Deng, He, Liu, Xing and Zhao10]. However, their high flexibility results in inaccuracy of their position control and limits their load capability [Reference Oliver-Butler, Till and Rucker11, Reference Ji, Kang, Shim and Hong12]. Continuum robots can be involved in many applications, such as cleaning, inspection, medical surgery, mobility, manipulation [Reference Kolachalama and Lakshmanan8], and pick and place [Reference Chien, Leong, Liu and Foong13]. Recent research provides a remarkable review of traditional continuum robots (TCRs) [Reference Fan, Yi and Liu14]. Additionally, the tongues of some animals, such as frogs, chameleons, and anteaters, are also existing examples of inspiration in terms of extensibility to reach different distances. The advantage of extensibility in continuum robots has a very high effectiveness to improve the applications of such robots and helps to reach and pick objects in cluttered, tight, and far places [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto15, Reference Li, Huang and Li16]. There are significant differences between [Reference Xu, Song, Zhang, Wang and Shi17] TCRs and ECRs in terms of their structures, motions, and workspaces. TCRs have a constant length [Reference Fan, Liu and Ye18], whereas ECRs have a variable length [Reference Zhang, Kan, Li, Wu, Wu and Peng2]. While TCRs can only perform bending motions [Reference Fan and Liu19], ECRs can perform bending, elongation, and compression [Reference Zhang, Kan, Li, Wu, Wu and Peng2]. Regarding workspace, TCRs are limited by their fixed lengths [Reference Fan and Liu19], but ECRs can improve their workspace due to their variable lengths [Reference Xu, Song, Zhang, Wang and Shi17]. These new features of ECRs introduce several challenges, such as increased complexity in mechanical design, mathematical modeling, and control. In addition, these features create challenges in achieving a balance between structural flexibility and strength.
The structure of ECRs is designed to be continuously bending either by their elements flexibility or by increasing the number of degrees of freedom (DOF) [Reference Xu, Song, Zhang, Wang and Shi17]. A backbone of a continuum robot is always considered as the main element in the robot’s structure and for the required motions [Reference Burgner-Kahrs, Rucker and Choset20]. ECRs that are manufactured by soft materials such as rubbers and elastic components are called soft robots, such robots have infinite DOF. However, actuation and precise control are challenges of soft robots [Reference Shamilyan, Kabin, Dyka, Sudakov, Cherninskyi, Brzozowski and Langendoerfer21]. The extensibility of the structure of continuum robots has a significant impact on improving their motions either for medical surgery [Reference Alfalahi, Renda and Stefanini22] or inspection applications [Reference Shikari and Asada23].
The common actuation methods of ECRs can be classified as tendons or cables actuation [Reference Oliver-Butler, Till and Rucker11, Reference Rao, Peyron, Lilge and Burgner-Kahrs24], pneumatic actuation [Reference Harsono, Yang, Bhattacharya and Yu25, Reference Huang, Zou and Gu26], and hybrid actuation based on integrating more than one actuation method [Reference Tao, Hu, Luo and Dong27]. Tendons are organized by several disks along the robot’s body, and they actuate such robots by pulling and releasing. They are simpler, easier, and better in terms of motion control than other actuation methods. Disks are usually rigid parts and determine the outer diameter of a robot [Reference Janabi-Sharifi, Jalali and Walker28]. Pneumatic muscles actuate continuum robots based on their extension and contraction [Reference Harsono, Yang, Bhattacharya and Yu25]. They are not easy for motion control and require an accuracy of the pressurized air to achieve a precise position. Moreover, the stiffness variability of continuum robots plays an important role for better effectiveness of such robots in terms of their applications. Based on the literature, there are generally several techniques for stiffness variability of continuum robots, such as jamming techniques [Reference Fan, Liu and Ye18, Reference Hu, Xiao and Wen29], pneumatic muscles [Reference Harsono, Yang, Bhattacharya and Yu25, Reference Giannaccini, Xiang, Atyabi, Theodoridis, Nefti-Meziani and Davis30], thermally responsive materials [Reference Cao, Ju, Zhang, Bai, Qi and Chen31, Reference Dou, Zhong, Cao, Shi, Peng and Jiang32], and mechanical structure [Reference Lin, Wang, Song, Li and Meng33]. However, pneumatic muscles can be a suitable method for the stiffness variability of ECRs as they have the ability to extend and contract.
Due to the lack of review papers in the literature for ECRs, this paper presents a review of ECRs. To the best of our knowledge, this is the first critical review for ECRs. This paper investigates the advantages and disadvantages of ECRs concerning their mechanical structures, actuation methods, control methods, and stiffness variability. This paper provides opportunities for researchers interested in this field to contribute to the advancement of ECRs through various designs and innovations. In addition, this paper makes a valuable contribution to the literature by offering insights to enhance existing ECRs. The goal of these proposed insights is to build an ECR that exhibits highly demanded advantages, including structural reliability and flexibility, precise and satisfactory motion, and a suitable technique for achieving variable stiffness.
The remaining of this paper has five more sections; the second section covers the research growth, the third section discusses the mechanical structure of ECRs, including types of storage and deployment, soft body, origami structure, and extensible and compressible backbone. The fourth section covers the actuation methods such as direct motorized actuation, pneumatic actuation, tendon actuation, and a hybrid actuation of tendons and pneumatic actuators. The fifth section covers the stiffness variability including balloons and elastic tubes, braided muscles, and creased bellows. The sixth section covers the control methods of ECRs. The seventh section discusses the future prospects of ECRs. Eventually, the eighth section is the conclusion.
2. Research growth
This section provides an overview of the research growth from 2010 to 2023 for ECRs. Based on the publication timeline shown in Figure 1, ECRs have a high attention in research in the last few years. The number of publications from 2010 to 2014 indicates that the interest in ECRs might be low. Starting from 2018, witnessed pronounced spikes, indicative of a maturing and intensifying interest in ECRs. The years from 2018 to 2023 present a remarkable surge in publications, signifying a sustained and growing enthusiasm within the research community. Notably, the peaks in 2021 and 2023 suggest pivotal years, potentially marked by significant advancements or increased scholarly attention. This upward trajectory underscores the rising importance and relevance of ECRs. Similarly, TCRs have a significant surge in publications in the last few years based on the Scopus database. Table I can be a helpful guide about the papers in this article in terms of the classifications of the mechanical designs and their related actuation methods and techniques of stiffness variability. The classification of ECRs in this paper is based on the mechanism behind their extensibility and their ability to vary their lengths.
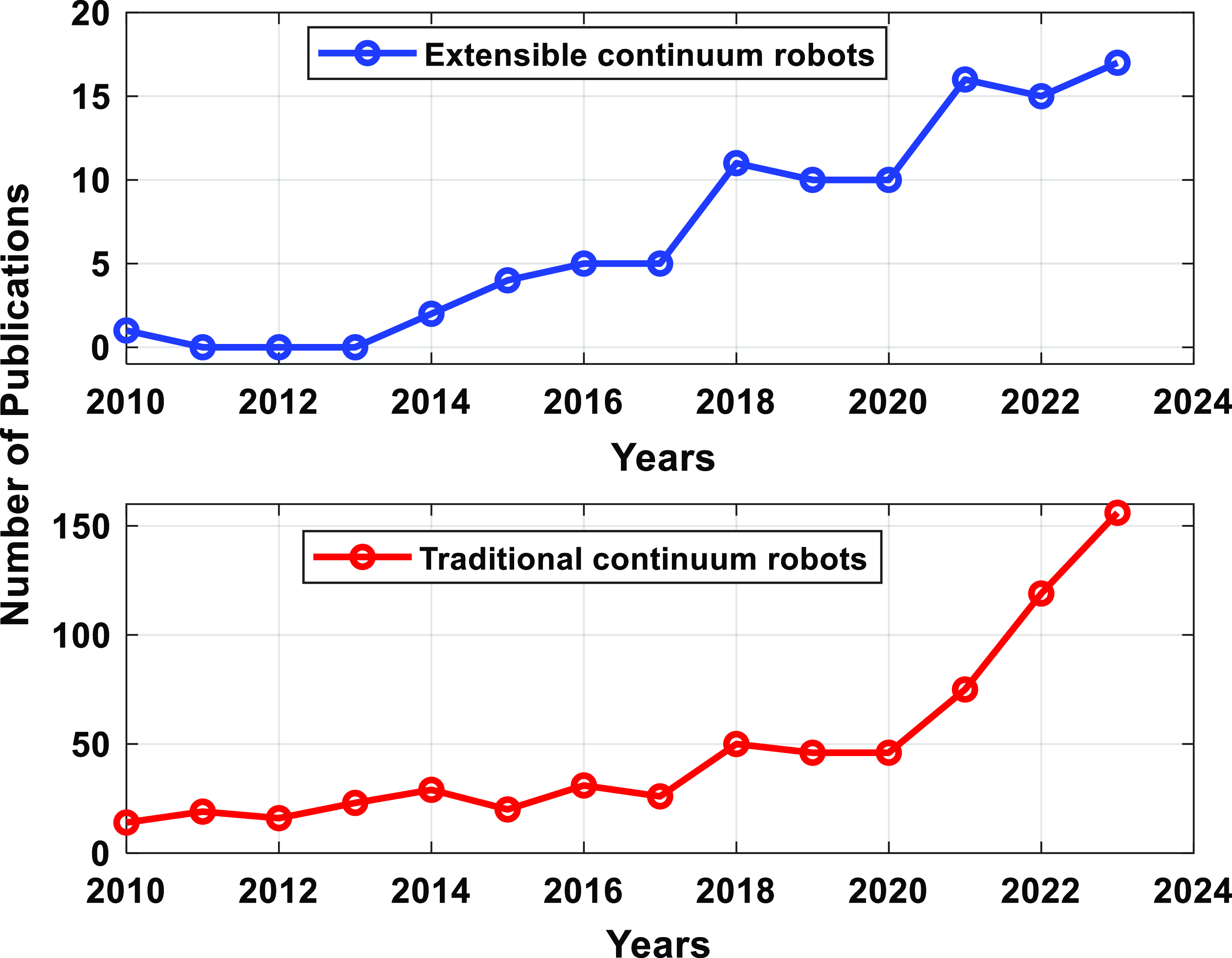
Figure 1. Annual publications on ECRs and TCRs.
Table I. Classification of ECRs and their related actuation methods and techniques of stiffness variability.
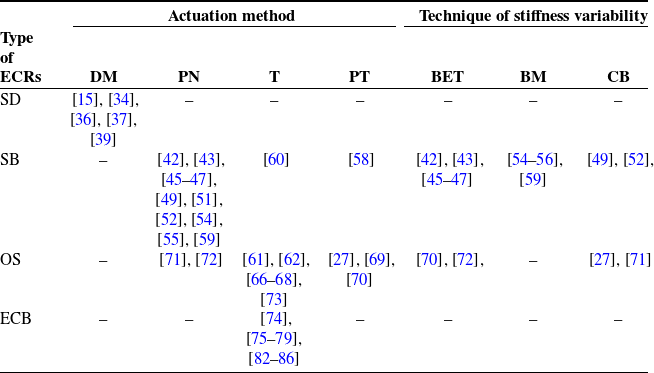
a “—” refers to no available work belonging to a specific category. Abbreviations in the table are: Storage and deployment (SD), soft body (SB), origami structure (OS), extensible and compressible backbone (ECB), direct motorized (DM), Pneumatic (PN), tendon (T), pneumatic and tendon (PT), ballons and elastic tubes (BET), braided muscles (BM), creased bellows (CB).
3. Mechanical structure
The design of ECRs plays an important role in terms of motion and stiffness variability. Thus, ECRs have different designs based on the required motions and applications. ECRs need to be designed to be able to bend, extend, and contract. This section discusses the design and structure of ECRs.
3.1. Storage and deployment
The concept of storage and deployment means that the robot’s body can be pushed out to a workspace and pulled back to a storage as shown in Figure 2, the length of a robot does not contract and extend. This means that an ECR can improve its length in the workspace without elongation and shorting, but it is by pushing the robot’s body to the workspace and pulling it back to its storage as required. These ECRs are classified under this name because they vary their length in the workspace depending on storage and deployment. An ECR was designed based on the concept of storage and deployment, it has two flexible racks and rigid linkages connected by revolute joints for horizontal bending only [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto15]. The two flexible racks have grooves in their external sides, facilitating actuation through gears connected to motors. The length of this ECR in the workspace can be controlled based on the concept of storage and deployment, but the length itself cannot be extended or shortened. Later on, the authors developed a new three-dimensional bendable ECR by utilizing a three-dimensional flexible rack. The three-dimensional flexible rack has grooves based on a screw form, which are purposely designed to be connected with motors through gears for the bending and transitional motions of the robot [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto34, Reference Mavinkurve, Kanada, Tafrishi, Honda, Nakashima and Yamamoto35]. Similarly, the principle of storage and deployment was used to design an ECR composed of a flexible backbone based on a screw form, rotating nuts, and plates [Reference Matsuura, Shioya, Asada and Takeda36]. The rotating nuts are used for the transitional motion by direct motorization and the plates are used to guide tendons for the bending motion, this ECR has moving actuation units along the screw backbone, resulting in a load suffering of the robot’s structure.
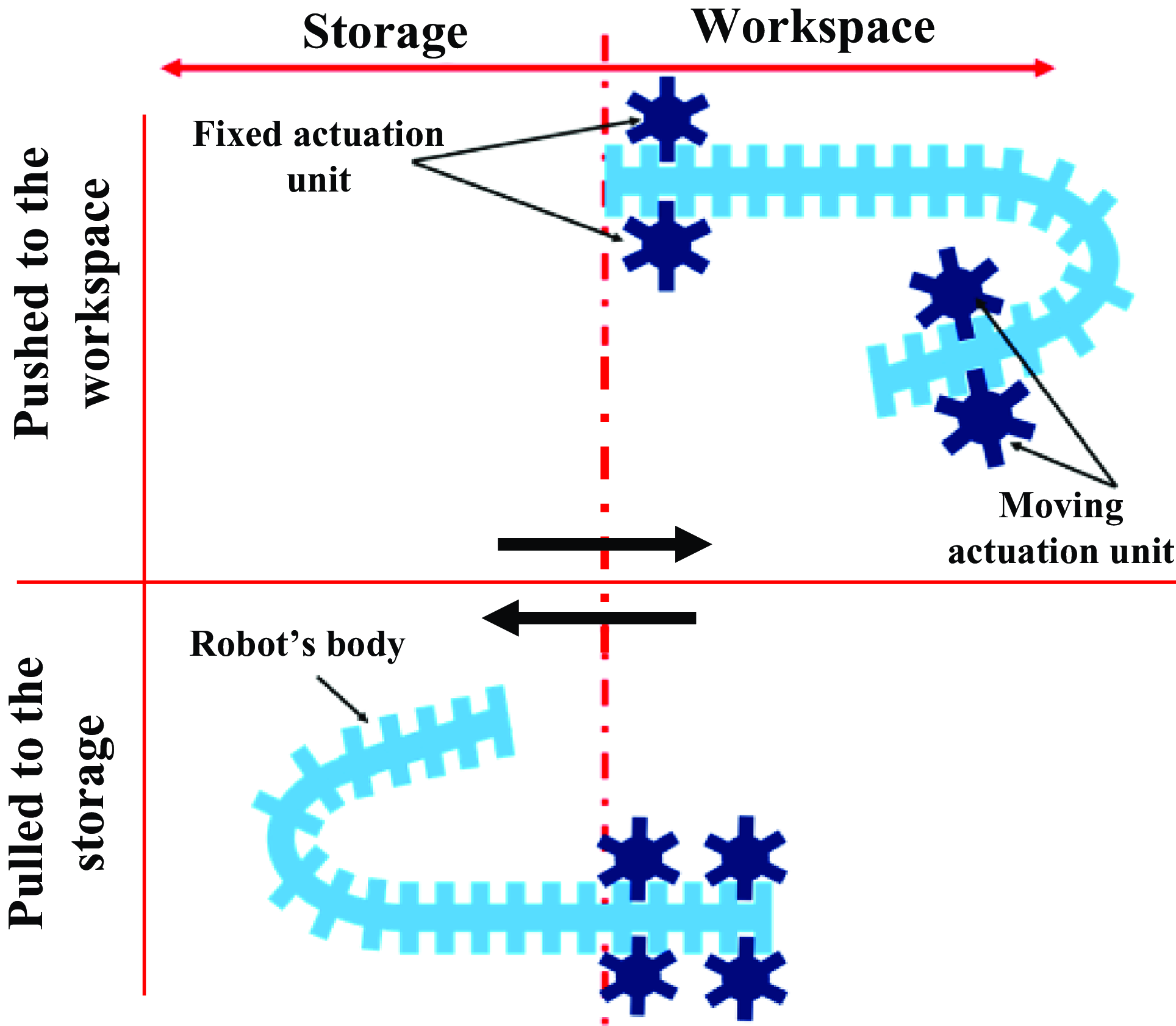
Figure 2. A diagram presents an ECR based on the concept of storage and deployment.
In addition, a three-dimensional ECR was developed based on three rigid and bendable tubes, which are actuated by three DC motors for the bending and transitional motion [Reference Kanada and Mashimo37, Reference Kanada, Giardina, Howison, Mashimo and Iida38]. The grooves of the tubes are attached to the motors’ gears, moving the three motors at the same time translates the robot’s body forward and backward accordingly, and the bending motion of the ECR is accomplished by moving one or two motors only. Another ECR was fabricated by three rigid and bendable racks with internal grooves in ref. [Reference Hughes, Santina and Rus39], the grooves are attached to the motors’ gears for the purpose of bending and extensible motions. The bending motion is achieved when the motors are actuated differentially, and the extensible motion is achieved when all the motors are actuated simultaneously. The disadvantage of this ECR is that the length of the robot does not extend and contract itself. It is only pushed to the workspace and pulled back to the storage using motors. Furthermore, the structure may suffer from the load of the moving actuation unit, which reduces the robot’s efficiency of holding heavy objects. Overall, this type of ECR have reliable and stiff mechanical structures, and they can achieve fast motion. However, the trade-off of increasing the reliability and stiffness of such mechanical structures is having less flexibility, and limited bending motion. Furthermore, these ECRs have the disadvantage of constant stiffness and fixed lengths.
3.2. Soft body
Soft ECRs are mainly manufactured by soft materials such as elastic tubes, balloons, braided muscles, and bellows, as shown in Figure 3. These soft materials enable such robots to bend, extend, and contract according to their inflating and deflating. Rigid disks may be used in the case of multi-segmentations to provide longer ECRs by serial connection of such elastic tubes, balloons, or bellows. Such ECRs vary their lengths due to their soft structures. Thus, they are categorized as soft ECRs. A simple soft ECR was designed by four flexible and non-stretchable tubes, one is in the centre as the main tube and three are around the main tube for the purpose of actuation [Reference Coad, Blumenschein, Cutler, Zepeda, Naclerio, El-Hussieny, Mehmood, Ryu, Hawkes and Okamura40]. The extension of this soft ECR is accomplished by pressurizing the central tube to push the tip of the robot forward away, and the shortening is achieved by wrapping the tube around a spool inside the pressure vessel of the system. The same soft ECR in ref. [Reference Coad, Blumenschein, Cutler, Zepeda, Naclerio, El-Hussieny, Mehmood, Ryu, Hawkes and Okamura40] was also considered for a study in ref. [Reference El-Hussieny, Hameed and Zaky41] for developing a control approach based on the model predictive technique. In addition, extensible and compressible sheaths and tubes were used to develop a soft ECR, the elastic tubes can be used as tendons when they are deflated [Reference Tutcu, Baydere, Talas and Samur42, Reference Talas, Baydere, Altinsoy, Tutcu and Samur43]. The robot achieves its extension by pressurizing the tubes, and it is compressed by pulling the depressurized tubes and wrapping them on spools. The stiffness is also controlled by air pressure inside the elastic tubes. Moreover, the robot can be bent by pressurizing the elastic tubes at different rates based on the desired bending direction. This ECR design is slow in terms of its extensible motion, and it is difficult to control as pulling, inflating, and deflating the elastic tubes are required to be considered in the control. Similarly, an ECR was designed in ref. [Reference Baydere, Talas and Samur44] based on two elastic tubes connected to two slacks individually. The tubes are extended when they are pressurized and both slacks are released. They also contract by vacuuming the pressure and pulling the slacks simultaneously.
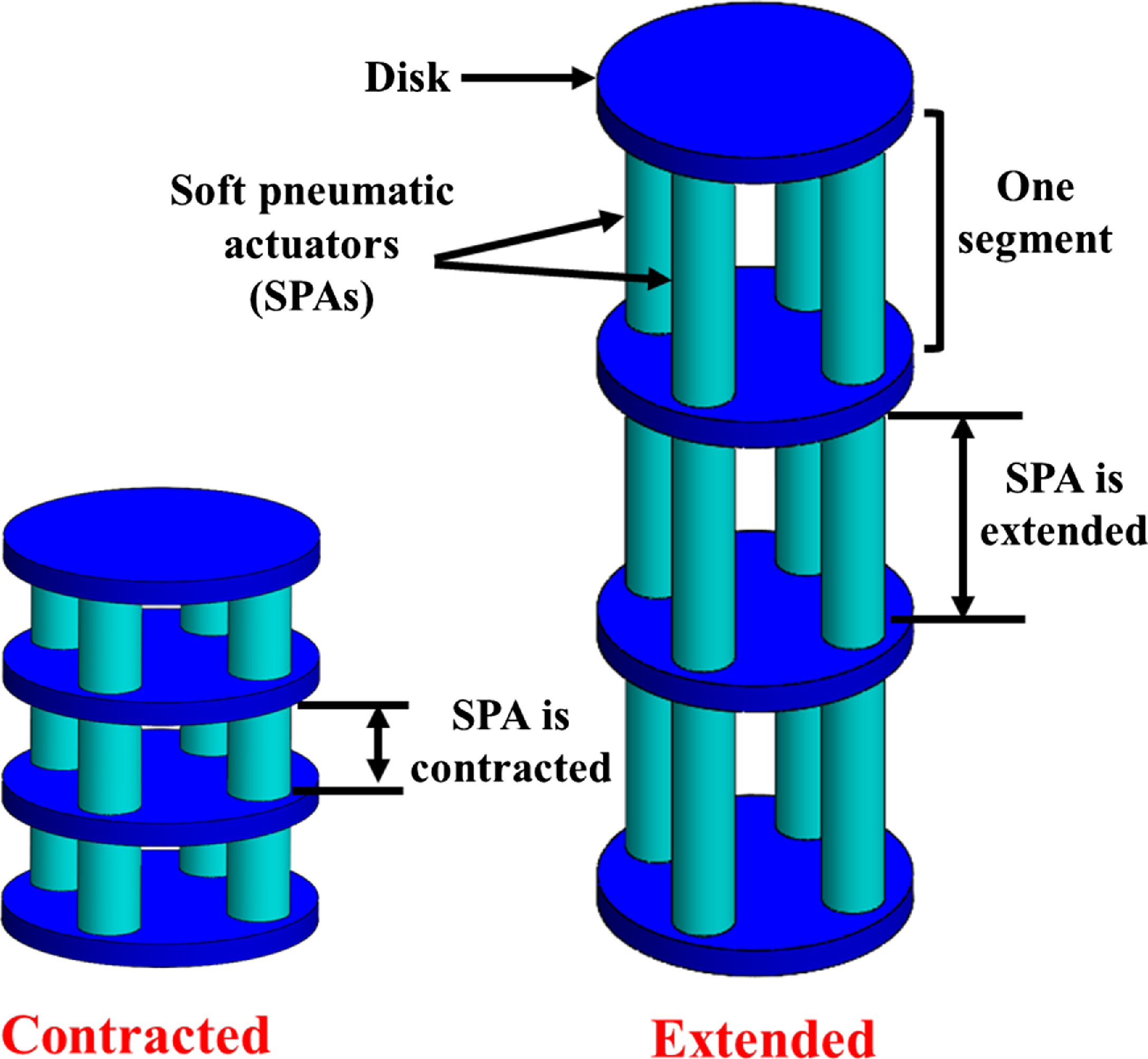
Figure 3. Example of soft ECRs.
Balloons were used to develop ECRs. In this regard, two inflatable balloons were used to design an ECR, the ECR is capable of extensive motion and two-dimensional motion as it has only two balloons [Reference Yarbasi and Samur45]. The extensible motion is achieved by inflating the two balloons equally, while the bending motion is achieved by inflating only one balloon at a time. The disadvantage of this ECR is that the diameter of the balloon increases during the inflating and their stiffness is low. For three-dimensional motion, inflatable balloons and rigid disks were utilized to form an ECR, three balloons in each section. The actuation is based on inflating and deflating the employed balloons for all the motions of bending, extension, and contraction [Reference Herzig, Jones, Perez-Guagnelli and Damian46]. This robot’s structure is unreliable, it is damageable by any external force and by a high pressure. In addition, a soft ECR was composed of three soft pneumatic actuators, a rigid base, three rigid constraint elements, and a rigid end-effector [Reference Wang, Wang, Wang, Meng, Liang and Xu47, Reference Zhang, Wang, Wang, Meng and Liang48]. The bending and axial motion of this robot are executed by the three pneumatic actuators. However, the robot is unable to contract its body, a tendon actuation method would be a suitable technique to contract such a robot’s soft body.
Another type of ECRs was designed based on bellows. Therefore, a soft ECR was designed by six elastic bellows mounted around a central tube, it has the capabilities for multidirectional bending motion, elongation, and shortening [Reference Takane, Tadakuma, Yamamoto, Konyo and Tadokoro49], increasing the number of the surrounding bellows increases the directional bending motion. The extension of the robot’s length is achieved by applying air pressure to all bellows at the same time, vacuuming the bellows leads to contraction. The bending motion is achieved by pressuring certain bellows based on the required directional bending. In addition, more ECRs based on bellows were proposed in refs. [Reference Lu, Chen, Chen, Zhou and Liu50, Reference Di Lallo, Catalano, Garabini, Grioli, Gabiccini and Bicchi51]. Similarly, six parallel bellows were used to form a soft ECR, this robot is capable of bending motion, rotating motion, elongation, and contraction [Reference Chen, Duanmu and Wang52, Reference Chen, Guo, Duanmu, Zhou, Zhang and Wang53]. The inequality of the pressure supply to the bellows results in the bending motion toward the bellows, which have less pressure, controlling the direction of the pressure difference among the bellows leads to the rotating motion, pressuring and vacuuming the bellows equally making the elongation and contraction, respectively.
Building reliable structures of soft ECRs was proposed based on developing strong pneumatic muscles. On top of that, a soft ECR was fabricated by a rubber tube, elastic bellow, and a braided expandable layer [Reference Yukisawa, Ishii, Nishikawa, Niiyama and Kuniyoshi54]. The rubber tube is inserted inside the bellow, and they are covered by the braided expandable layer. The braided expandable layer supports the rubber tube and the elastic bellow during pressurizing the inner rubber tube. This soft ECR is compressed at zero pressure, and it is extended by pressurizing the inner rubber tube. However, the robot does not have an actuation method for bending motion and can only perform extension and contraction. Then, the authors optimized it to a longer ECR with three segments and three muscles as actuators in each segment [Reference Yukisawa, Nishikawa, Niiyama, Kawahara and Kuniyoshi55–Reference Morimoto, Ikeda, Niiyama and Kuniyoshi57]. The optimization enhances the robot to achieve a large extension ratio and bending angle. However, the robot’s stiffness is not sufficient enough to grasp heavy objects.
In addition, another ECR of three pneumatic muscles was developed in ref. [Reference Chairopoulos, Vartholomeos and Papadopoulos58]. The robot is actuated by tendons. It also has three pneumatic muscles in constant atmospheric pressure. The robot was extended to two serial segments and each segment has a separate tendon actuation. Therefore, the two actuation techniques complicate the robot’s motion control. Three pneumatic actuators formed a soft ECR with constraints along the robot to maintain the three pneumatic actuators in fixed parallel to each other [Reference Gilbert and Godage59]. This soft ECR is actuated to achieve the bending motion by pressurizing one or two pneumatic actuators, and the extensible motion is achieved by pressurizing the three pneumatic actuators at the same time. The robot remains at its initial length when the three pneumatic actuators are depressurized and does not achieve extra contraction.
Another soft ECR was designed by using flexible silicone parts and actuated by three cables [Reference Wang, Tang, Xin, Xie, Guo and Laschi60]. The elongation and contraction of the robot are accomplished by pulling and pushing the cables, respectively. The robot can also achieve bending motion by pulling one or two cables. This soft ECR can only achieve limited elongation and contraction for about 30% of its original length. As a conclusion, ECRs based on soft materials possess the advantage of flexibility, variable stiffness, and they have the capability to extend and contract. On the contrary, soft ECRs are difficult to control and slow in terms of motion. Moreover, the structures of soft ECRs are damageable either by external impacts or internally by high pressure.
3.3. Origami structure
Origami structure is based on folding a single sheet of material into different compliant shapes with many creases. Valley folds and mountain folds of the creases benefit such structures to have the capabilities to bend, extend, and contract. Therefore, the reason behind the elongation and compression of this type of ECRs is the flexible origami structure. Figure 4 shows an example of ECRs based on origami structures. A simple origami ECR was designed by folding a flat cardboard sheet into a 3D origami parallel structure, a helical spring was integrated with the origami structure as a backbone [Reference Zhang, Qiu and Dai61, Reference Zhang, Qiu and Dai62]. It is driven by three tendons for both the bending motion and the axial contraction, the bending motion is occurred when one or two tendons are in tension, and the axial contraction is occurred when all the three tendons are in tension. Another simple origami ECR based on spring inspired with the capabilities of bending, twisting, and extensibility was proposed in ref. [Reference Chen, Feng, Lv and Duan63]. It was also optimized for rolling motion by mounting two wheels at its two ends and wrapping its body by a thin film. It is manually bent, twisted, compressed, and extended, then it recovers its body to the normal state. This ECR is damageable due to its thin materials, it is also limited in its speed and motion as it depends only on the shape recovery.
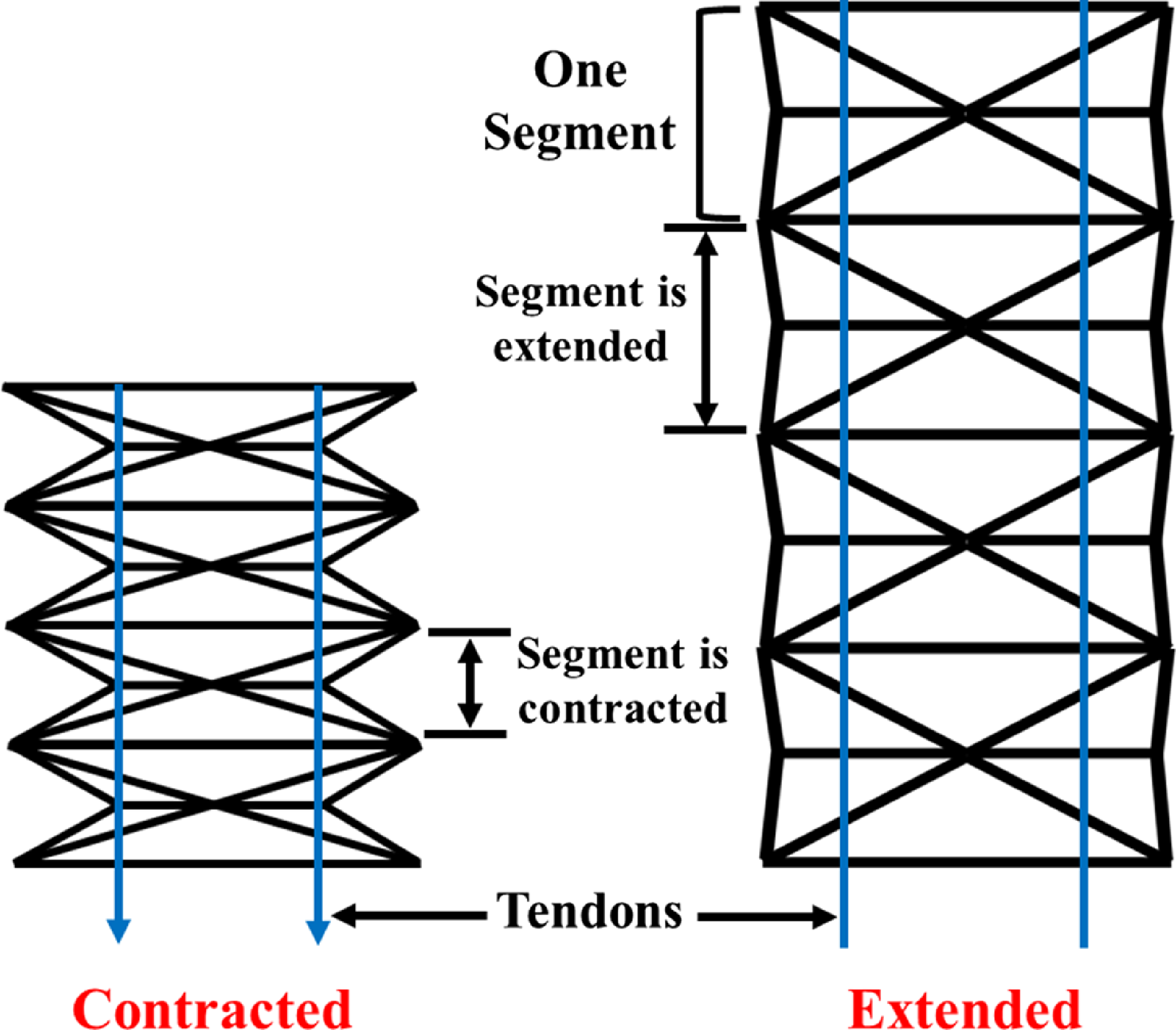
Figure 4. Diagram of ECRs based on origami structures.
An origami structure of an ECR was fabricated by a polyethylene terephthalate film due to its low cost and high tensile strength [Reference Santoso, Skorina, Luo, Yan and Onal64]. This origami ECR has the capabilities of bending motion, extension, and contraction. It has two segments connected in series and they are driven independently. It was tested to resist a horizontal load by opposite bending motion. Furthermore, it performed circular tip tracking in the presence of an axial load while keeping the top plate parallel to the ground in order to balance the axial load. Then, the robot was extended to three segments in ref. [Reference Santoso and Onal65]. In addition, there was also an improvement of this origami ECR to a longer length with four integrated segments as a snake-inspired continuum robot as was illustrated in ref. [Reference Luo, Yan, Wan, Qin, Santoso, Skorina and Onal66]. This robot is actuated by internal cables and electric motors as well. It has the capabilities of sidewinding, extension, and contraction. The wheels are passive and are only used to minimize the friction between the robot’s body and the ground. A novel improvement to the origami ECR in ref. [Reference Luo, Yan, Wan, Qin, Santoso, Skorina and Onal66] to navigate through narrow places was presented in ref. [Reference Sun, Jiang, Yang, Walter, Santoso, Skorina and Onal67]. Powered wheels were added to the novel ECR to directly drive the robot forward and backward. The robot still has the features of bending, extension, and contraction through cables actuation. The origami ECR in ref. [Reference Santoso, Skorina, Luo, Yan and Onal64] and its enhancements in refs. [Reference Santoso and Onal65–Reference Sun, Jiang, Yang, Walter, Santoso, Skorina and Onal67] are all difficult in terms of manufacturing, and their mechanical structures are non-variable stiffness and are not reliable.
A lightweight ECR was designed based on the origami structure with tendons for the actuation purpose [Reference Xu, Peyron, Kim and Burgner-Kahrs68]. The robot remains extended when all the tendons are not in tension, it has flexible tubes in the centre of its structure, and they can be inserted in each other during the axial motion. Similarly, an ECR was developed based on two layers of origami structures, the inner origami structure is based on soft tubes and works as pneumatic actuators for the extension of the robot’s body and also to regulate the stiffness [Reference Tao, Hu, Luo and Dong27]. Furthermore, the outer origami structure has several paths to organize nine tendons. The bending motion and the compression of the robot’s body are performed by the tendons’ actuation techniques. This design exhibits good features such as bending motion, extension, contraction, and stiffness variability. However, the combination of the nine tendons and the pneumatic actuators to actuate the robot imposes complexity to control the robot’s motion. Additionally, a hybrid ECR was designed by a pneumatic origami chamber and tendons, the origami chamber is the main part of the robot’s structure, and it is utilized to extend the robot’s body and to adjust the stiffness by regulating the air pressure. The tendons are used to contract the robot’s body when all the tendons are pulled simultaneously, and they are used for the bending motion when they are pulled differentially [Reference Zhang, Tang, Fan, Xun, Wang and Chen69]. This design shows good features as it has the capabilities for bending motion, extension, contraction, and stiffness control. However, the manufacturing of the origami chamber is complicated, and it is inflated by a low pressure due to the softness of its internal chamber, which leads to an insufficient stiffness. In addition, the rigid external cover limits the bending and contraction of the robot.
For better structural stiffness, an ECR was fabricated by three origami structures, which are parallely attached together for better stiffness of the robot’s body, it is driven by three tendons and can perform bending motion, extension, and contraction [Reference Fathi, Vrielink, Runciman and Mylonas70]. It has three balloons; each balloon was inserted inside an origami structure, which is used for stiffness variability. Another improvement of the stiffness variability was gained in an ECR by utilizing six soft origami actuators in each segment, these origami actuators can be extended and contracted which results in the extension and contraction of the whole robot [Reference Liu, Liu, Zou, Wang, Fang, Yi and Wang71], these soft origami actuators can be pressurized by fluid and air pressures. This ECR has a complicated structure and leads to the difficulty of control as each soft actuator has its own input and they are pressurized independently. In addition, the robot can be extended by pressurizing all the actuators, but when they are depressurized, the robot comes to its normal length without any more contraction.
An ECR named “Pneumagami” was developed based on the origami-inspired structure and pneumatic muscles [Reference Robertson, Kara and Paik72]. Each segment of this ECR has a lower base plate and an upper moving plate which are connected through three legs. There are also six pneumatic muscles or called pouch actuators in each segment which are attached across the legs and the upper plate. One is positioned on the inner side and another is on the outer side of each joint. The inflation of the pouch actuators generates a tension force between the two ends of an actuator causing a decrease in the joint angle on the side of the actuator. The structure of this robot is very limited in terms of payload and can be bent easily by any external load as the entire stiffness is only by the pouch actuators. A similar structure of an ECR to the Pneumagami ECR was proposed in ref. [Reference Zhuang, Zhang, Guan, Wei, Li, Tang, Kang, Song and Dai73] for pick and place, but it is stiffer, and it is a tendon-driven robot. The stiffness of this ECR is stiff enough for carrying various objects. However, the result of the stiff structure sacrifices the advantage of flexibility, and its stiffness is not variable. Eventually, the ECRs based on origami structures have the ability to execute different motions such as bending, extension, and contraction. However, such structures are complicated, unreliable, difficult to manufacture, and most of them are not suitable for variable stiffness.
3.4. Extensible and compressible backbone
This type of ECRs gains its axial motion due to the existence of extensible and compressible elements in their backbones, such as springs as shown in Figure 5, axial prismatic joints, or they have several revolute and prismatic joints which enable them to achieve an axial motion. A simple ECR as an extensible and compressible backbone was designed by a spring as the main component (backbone) and distributed disks along the robot’s body to guide the tendons [Reference Wang and Zhang74]. The robot has the abilities to execute bending motion, extension, and contraction. However, the stiffness of the robots depends only on the spring’s stiffness which constrains the robot’s applications, it cannot be employed to hold and carry variable payloads. Similarly, an ECR was designed by a spring and actuated by tendons [Reference Wang, Deng, He, Liu, Xing and Zhao10]. Likewise, a tendon-driven ECR was fabricated based on a spring as a backbone. The robot is able to execute bending motion, extension, and contraction [Reference Gao, Wang, Liu and Zheng75]. Depending on the spring as the main element of the robot’s structure, limits the robot’s application to certain payloads.
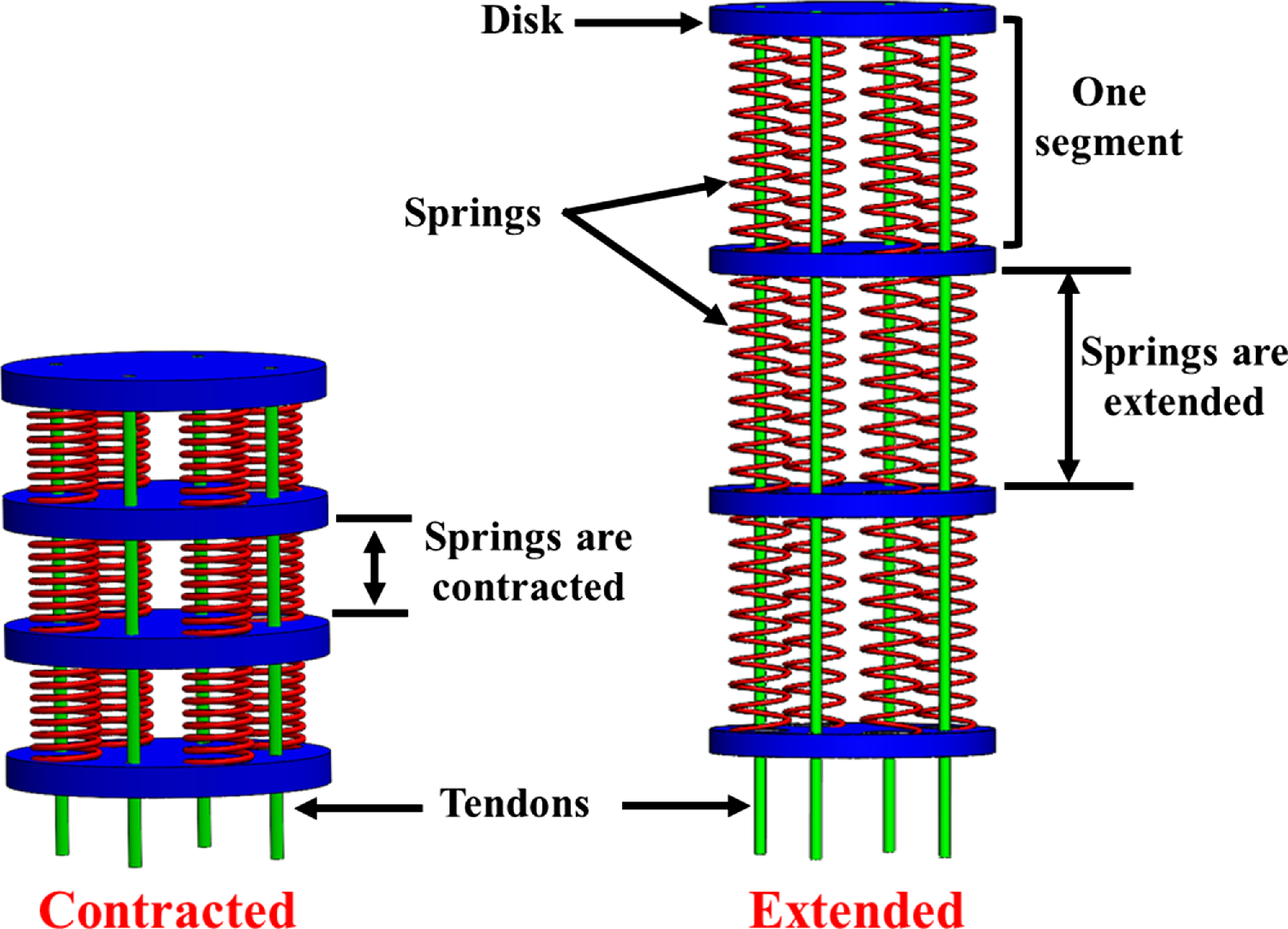
Figure 5. Extensible and compressible backbone of an ECR based on springs.
In order to improve the structural stiffness of such ECRs, parallel springs were used as multi-backbones to form an ECR based on tendon actuation [Reference Frazelle, Kapadia and Walker76, Reference Frazelle, Kapadia and Walker77]. Plastic spaces were also employed to organize the cables and springs in each segment. The robot is extended and contracted by simultaneously pulling and releasing the cables. The bending motion is also achieved when the cables are in tension differentially. This design uses many rigid spacers and three rigid section dividers which prevent the body of the robot from accomplishing a sufficient contraction. Additionally, springs and rigid disks were used to develop an ECR with the actuation of tendons [Reference Su, Jin, Wu, Liu, Liu, Wang, Sun, Lam, Li, Tang and Kuang78]. The top segments of the robot are bent and compressed by three cables, and the bottom segments are bent and compressed by other three different cables. The extension of the robot’s body occurs due to the pre-compression which the springs generate opposite forces. In addition, a similar ECR based on springs and rigid spacers was illustrated in ref. [Reference Almanzor, Ye, Shi, Thuruthel, Wurdemann and Iida79]. These robots have the ability to be bent and compressed. However, they have some disadvantages, such as non-variable stiffness, difficulty of control, and limited to certain payloads.
An ECR based on an extensible and compressible backbone due to the existence of a prismatic joint was simply designed by three bendable tubes and actuated by two cables in each tube, the last tube has a smaller diameter than the middle tube and the base tube [Reference Walker, Nahar, Verma, Wooten and Kapadia80]. This ECR has a difficulty of motion for the extension and contraction caused by the friction between the tubes. Thus, ball bearings are used in the spacers to minimize the friction. Furthermore, the bending motion is also difficult when the robot is in contracted status. Another ECR was also similarly fabricated by three elastic tubes and four tendons, the middle tube has the smallest diameter [Reference Zhang, Sun, Jia, Huang, Li, Mao, Hu, Chen, Kuang, Tang, Xiao and Su81]. It has also the disadvantage of bending difficulty when it is contracted. A better design of such robots was proposed in ref. [Reference Amanov, Nguyen and Burgner-Kahrs82], which has less friction between tubes and uses tendons for the bending motion and permanent magnets for the axial motion. Disks are attached at the end of each tube, and the permanent magnets are distributed along the tubes. The rigid disks and the permanent magnets take up much space of the robot’s length which leads to limited bending and contraction. along these same lines, the concentric tubes, tendons, and permanent magnets were also utilized in refs. [Reference Nguyen and Burgner-Kahrs83] and [Reference Neumann and Burgner-Kahrs84] to design an ECR. However, the need for many permanent magnets in such robots constrains the robots’ motion and increases the load on the robots’ structure.
A tower structure inspires an ECR, which was manufactured by rigid parts and all the rigid parts are connected with each other by revolute joints [Reference Wu, Yang, Li, Zhao, Wu, Zhu and Zhang85]. Benefiting from the large number of joints, the ECR can perform bending motion, extension, and contraction. The robot can achieve the bending motion and the contraction based on the tendon actuation, but the extension is achieved under the force of gravity as the robot’s base is fixed in a ceiling. The performance of the robot demonstrates sufficient contraction. However, the robot’s structure is not flexible enough to achieve a large bending. A better structural design in terms of bending motion was proposed in ref. [Reference Zhang, Shi, Huang, Wu, Zhao, Yang, Rajabi, Wu, Peng and Wu86]. This last ECR was design of rigid links with multi-DOFs for the purpose of gripping, the complaint structure of the robot is gained from the many revolute and prismatic joints to achieve bending motion, extension, and contraction. The robot is actuated by four cables and two motors. The robot’s structure has a constant stiffness, and its structure is complicated. In addition, the robot’s structure must be long with many segments to achieve a large bending angle, but the control difficulty increases with the length increase.
A different ECR was proposed based on rigid links connected by racks and gears through flexible rods. The first rigid link is actuated by linear motors and then the motion is transmitted to other rigid links by the racks and gears, which results in the whole robot motion [Reference Liu and Ben-Tzvi87, Reference Liu and Ben-Tzvi88]. The motion transmission among the rigid links is not easy, and the length of the rigid links limits the bending and extensible motions, which achieves only a maximum angular position of 80 degrees and a maximum transitional extension of 32.2 % ratio. Based on the reviewed papers in this section, this type of ECRs has the capability to achieve the motions of bending, extension, and contraction. Moreover, the ECRs that are designed by rigid parts with many joints have reliable structure. On the contrary, these ECRs do not have the advantages of stiffness variability, and they are limited in terms of extension and contraction.
3.5. Summary
This section briefly summarizes the advantages and disadvantages of different ECRs in terms of their designs, such as ECRs based on the concept of storage and deployment, soft ECRs, ECRs based on origami structure, and ECRs based on their extensible and compressible backbone. Table II summarizes the advantages and disadvantages of such ECRs. The ECRs based on storage and deployment have reliable mechanical structures which indicates that the structure is strong and dependable. They are also fast in transitional motion as they can move quickly from one position to another. They have a prolonged operational life, implying durability and resistance to wear and tear over an extended period. However, their structural stiffness remains constant, regardless of the applied load or external conditions. These types of ECRs can only achieve small bending angles as their structures are not highly flexible. Additionally, their lengths remain constant and do not stretch or compress according to demands, and their structures experience additional loads by the moving actuation units.
Table II. Advantages and disadvantages of current designs of ECRs.
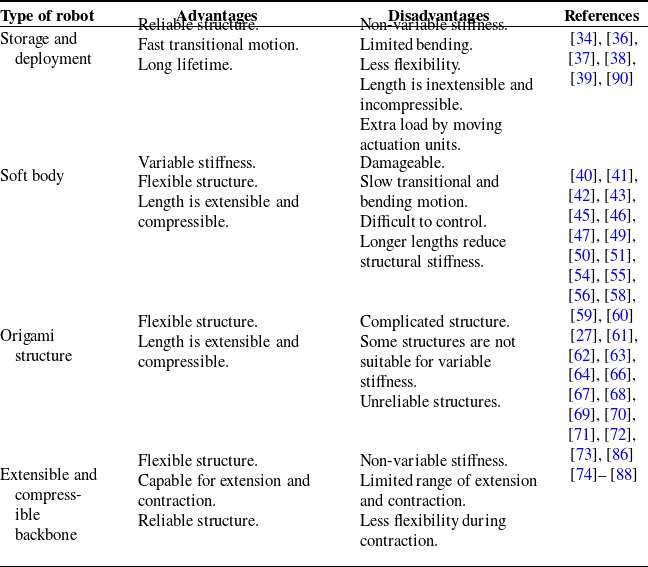
In addition, the ECRs with soft structures can adjust their rigidity based on specific requirements or external conditions, their structure is highly flexible. They can extend and compress to enhance versatility in applications where the dimensions of the structure need to be dynamically adjusted. However, their structures are damageable due to external conditions or operational life. Their transitional and bending motions are slow, which is not preferable in many applications where rapid responses or movements are required. Soft ECRs are difficult to control, which leads to issues in achieving desired movements or maintaining stability. Additionally, their structural stiffness decreases with longer lengths, which restricts the effective use of longer structures in certain applications. For the ECRs based on origami structures, they have good flexibility, and their lengths can be extended and contracted. However, they have complicated structures which impose challenges in terms of manufacturing, assembly, and maintenance. Their structures are not appropriate for variable stiffness, and they are not strong and dependable. Lastly, the ECRs that their backbones have extendable and compressible elements, they are moderate in terms of their structural flexibility, axial motion, and structural reliability. In contrast, they have the disadvantages of non-variable stiffness, cannot achieve large extension and contraction, and cannot bend their structures when they are contracted.
Table III presents a comparison of performance parameters of ECRs. Based on that, the structure of ECRs influences the mechanical behaviours in terms of elongation, compression, bending, and stiffness. The ECRs based on storage and deployment cannot elongate and compress their structures, they cannot achieve large bending angle, and their stiffness is constant. Soft ECRs can achieve large axial and bending motion, and their stiffness is variable. Similarly, ECRs bases on origami structures can achieve large axial and bending motion, but their stiffness is variable for some structures and non-variable for others. In addition, ECRs based on extensible and compressible backbones can only achieve limited axial and bending motion, and their stiffness is non-variable.
Table III. A comparison of performance parameters of ECRs.

4. Actuation methods
This section reviews the actuation types that have been used in the literature to actuate ECRs. Based on the existing publications in the literature, these actuation techniques can be categorized to direct motorized actuation, pneumatic actuation, tendon actuation, and a hybrid actuation technique of tendons and pneumatic actuators.
4.1. Direct motorized actuation
Electric motors are not commonly used to directly actuate ECRs. However, there are some ECRs that were actuated directly by DC motors through gears based on the push and pull of the whole body. The category of ECRs based on storage and deployment are actuated directly by electric motors in terms of bending, pushing them out to their workspace, and pulling them back to their storage, as shown in Figure 2. Simply with a 2D bending motion of an ECR, four DC motors were used to actuate an ECR based on pushing and pulling the body of the robot, this ECR has two bendable racks with external grooves connected with the motors through gears, two motors in each actuation unit [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto15]. The robot is pushed to its workspace by moving the two DC motors simultaneously, and it is similarly pulled back from the workspace. The robot can be bent in 2D by only moving one DC motor. For the purpose of a 3D bending motion, there was an optimization in the robot design to bend in 3D. Thus, three DC motors were used in each actuation unit to increase the DC motors to six motors for the actuation purpose of the 3D ECR [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto34]. Based on that, this 3D ECR achieves its transitional motion by moving all the motors simultaneously, and the bending motion is achieved when the motors move differentially. Furthermore, four rotary motors were utilized to actuate an ECR for transitional motion, the robot’s backbone was designed as a screw which is attached to the motors through rotating nuts [Reference Matsuura, Shioya, Asada and Takeda36]. The four rotary motors are distributed equally along the backbone of the ECR and they can operate independently. However, the actuation units based on the motors are not able to bend the robot’s body. Thus, tendons were employed for the bending motion of this robot.
A design of an ECR based on flexible racks uses one fixed actuation unit and another moving actuation unit, each actuation unit has three DC motors attached to grooves in the internal side of the flexible racks by gears [Reference Hughes, Santina and Rus39]. The motorized actuation units enable the transitional and bending motions of the ECR based on the three flexible racks. Similarly, an ECR, which has three bendable tubes based on a screw form uses six DC motors based on three motors in each actuation unit [Reference Kanada and Mashimo37]. Each tube is attached to two motors, one motor in the lower actuation unit and another motor in the upper actuation unit. Similar procedure to achieve the bending and transitional motions compared to other ECRs, the simultaneous moving of all motors achieves the linear motion of the robot, and the differential moving of the motors bends the robot in the direction of a faster moving motor. Based on reviewing several ECRs that are directly actuated by electric motors, employing electric motors benefits the ECRs to increase their speed of both the transitional motion and the bending motion and to achieve the accurate desired position. However, the flexible backbones of such ECRs suffer from the extra load by the moving actuation units. Furthermore, the direct actuation by electric motors requires many motors, which leads to high cost, difficulty of control, and high-power consumption.
4.2. Pneumatic actuation
Pneumatic actuators have been used to actuate ECRs by using air pressure. The pneumatic actuators are mainly manufactured by elastic and inflatable materials to allow them to extend and contract due to the forces that are generated by the inflation and the deflation, an example of pneumatic actuators in ECRs is shown in Figure 3. These pneumatic actuators can be elastic tubes, balloons, braided muscles, or bellows. Inflatable balloons are a simplistic type of pneumatic actuators that have been used in the literature to actuate ECRs. Two balloons act as pneumatic actuators to actuate an ECR in terms of bending motion, extension, and contraction, as presented in ref. [Reference Yarbasi and Samur45]. These two long balloons can achieve a 2D bending motion and transitional motion of the robot, but they are not able to provide high stiffness for the robot’s body. Another ECR of three modules uses three elastic balloons in each module as pneumatic actuators [Reference Herzig, Jones, Perez-Guagnelli and Damian46], the pneumatic actuators based on balloons are connected in series through rigid disks. Such pneumatic actuators based on balloons can execute a 3D bending motion, elongation, and compression. However, they do not afford high pressure, which leads to inefficiency in producing high stiffness for the robot’s structure, and they can be easily damaged by any external force.
In addition, several pneumatic actuators or called pouch actuators were used in an ECR based on origami structure, six pneumatic actuators were used in each segment which are attached across the legs and the upper plate, one is inner and one is outer of each joint [Reference Robertson, Kara and Paik72]. The inflation of the pneumatic actuators generates a tension force between the two ends of an actuator, causing a decrease of the joint angle on the side of the actuator. These pneumatic actuators, based on pouches, are able to bend and extend the robot body. However, they are not able to efficiently support the robot in terms of stiffness and to carry a payload. Moreover, each pneumatic actuator based on the pouch is actuated independently, which imposes the control complexity.
Elastic tubes act as pneumatic actuators and can provide better stiffness than balloons. In this regard, an ECR as one pneumatic actuator was proposed in ref. [Reference Di Lallo, Catalano, Garabini, Grioli, Gabiccini and Bicchi51], this pneumatic actuator has the ability to bend, extend, and contract using air pressure. However, it is winded by a cylindrical and an unstretchable sheath to execute the extension without increasing its diameter, it is also attached by an un-extensible sheath on one side, which limits its bending to one direction only. Three elastic tubes can improve the bending motion in a few directions, which were used to actuate a soft ECR in terms of bending, extension, and contraction in refs. [Reference Tutcu, Baydere, Talas and Samur42, Reference Talas, Baydere, Altinsoy, Tutcu and Samur43]. The evacuated tubes of this robot are wrapped on spools for the compression of the robot’s body. Similarly, three pneumatic actuators based on elastic tubes actuate an ECR for bending and extension. The robot bends its body by inflating one pneumatic actuator or two pneumatic actuators and it extends its body by inflating all the three pneumatic actuators at the same time [Reference Wang, Wang, Wang, Meng, Liang and Xu47]. However, these three pneumatic actuators are not able to compress the robot’s body when they are depressurized.
As balloons are not sufficient enough to provide high stiffness to ECRs, a strong pneumatic actuator was developed by an inner elastic tube and covered by a bellow and a braided expandable layer as developed in ref. [Reference Yukisawa, Ishii, Nishikawa, Niiyama and Kuniyoshi54]. Thus, inflating the inner elastic tube generates a force to extend the muscle, and it is contracted by deflating the inner elastic tube. Such extension and contraction of a single pneumatic actuator resulting in the overall motion of an ECR in terms of bending, extension, and contraction. Based on that, a long ECR was fully actuated by such pneumatic actuators in terms of bending, extension, and contraction [Reference Yukisawa, Nishikawa, Niiyama, Kawahara and Kuniyoshi55]. Nine pneumatic actuators were divided between three segments of the ECR, which means that three pneumatic actuators in each segment. Therefore, inflating one pneumatic actuator or two pneumatic actuators in a segment leads to a bending motion, and the robot’s body extends when the three pneumatic actuators are simultaneously pressurized. Similarly, the contraction of the robot’s body is achieved by the simultaneous depressurizing of the pneumatic actuators.
In addition, a soft ECR was mainly actuated by three pneumatic actuators using air pressure to achieve the required bending, extension, and compression [Reference Gilbert and Godage59]. This robot can achieve longer length with higher air pressure applied to the three pneumatic actuators simultaneously, but it has only one segment which limits its extension. Then, a longer ECR with two segments was developed in ref. [Reference Al-Ibadi, Nefti-Meziani, Davis and Theodoridis89]. It has seven pneumatic actuators divided into four pneumatic actuators in the first segment and three in the second segment. These seven pneumatic actuators act as extensors and contractors when they are pressurized depending on their initial status, this causes a confusion and leads to undesirable motions instead of the demanded bending and transitional motion.
Bellows are advantageous pneumatic actuators. Based on that, six pneumatic actuators based on bellows were used in each segment for the bending motion and the transitional motion of a soft ECR, this robot has two segments which has twelve pneumatic actuators in total [Reference Takane, Tadakuma, Yamamoto, Konyo and Tadokoro49]. The bending motion of this robot is achieved by inflating the pneumatic actuators differentially, and the transitional motion is achieved by simultaneous inflating and deflating the pneumatic actuators. The twelve pneumatic actuators in this robot are a drawback that leads to the control difficulty. Similarly, another ECR uses six bellows as pneumatic actuators in ref. [Reference Chen, Duanmu and Wang52]. These six pneumatic actuators are capable to elongate, contract, bend, and rotate the ECR. The elongation, contraction, and bending of this ECR are accomplished similarly to other ECRs. In addition, the tip rotation is occurred by changing the pressure of the bellows in the direction of rotation. This robot shows good features in terms of its various motions. However, the large number of pneumatic actuators imposes the control complexity of the robot. One more ECR that uses pneumatic actuators based on bellows was developed in ref. [Reference Liu, Liu, Zou, Wang, Fang, Yi and Wang71], this ECR has four segments and in each segment six pneumatic actuators, these pneumatic actuators actuate the robot in terms of bending motion, extension, and contraction. However, each pneumatic actuator has its own air pressure input, so they are all actuated independently which leads to a very complicated control process.
Pneumatic actuators benefit ECRs with several advantages such as high flexibility, lightweight, ability for extension and contraction, efficiency to carry heavy payload relative to their weight, and variable stiffness. However, there are some disadvantages such as complexity of control, demand of compressors and pressure regulators, limited bending motion, slow motion, vibration and noise during pressurizing and depressurizing, and short lifetime.
4.3. Tendon actuation
Tendon actuation is a very common technique of actuation in continuum robots. In tendon actuation, tendons or cables are distributed based on equal interval holes over a circular guidance disk. Each tendon or cable is connected through the holes to an actuator from one end, and the second end is attached to the most distal disc. The changes in cable lengths by pulling or releasing them generate various types of motions such as bending, extension, and contraction accordingly. Figure 6 explains the mechanism of tendons for ECRs. A simplified actuation method of tendons was employed based on three tendons and was utilized to actuate a lightweight ECR based on an origami structure in terms of bending and contraction [Reference Xu, Peyron, Kim and Burgner-Kahrs68], and the robot is extended due to its axial stiffness. In addition, tendons were also used to drive an ECR based on a snake inspired, the robot achieves its bending motion by differentially pulling the tendons, and the contraction is achieved by simultaneously pulling the tendons [Reference Luo, Yan, Wan, Qin, Santoso, Skorina and Onal66, Reference Sun, Jiang, Yang, Walter, Santoso, Skorina and Onal67]. However, this ECR is elongated due to the axial stiffness of its structure. Besides, tendons were employed to actuate an ECR based on an origami structure tower and it was developed by rigid parts connected with each other by revolute joints [Reference Wu, Yang, Li, Zhao, Wu, Zhu and Zhang85], the bending and contraction are accomplished by the tendons through tension, but the extension is accomplished by the gravitational force as the robot is hanged on a ceiling. Similarly, an ECR based on rigid parts and many joints was actuated by four tendons [Reference Zhang, Shi, Huang, Wu, Zhao, Yang, Rajabi, Wu, Peng and Wu86], these four tendons are able to bend, contract, and release the structure of the robot.
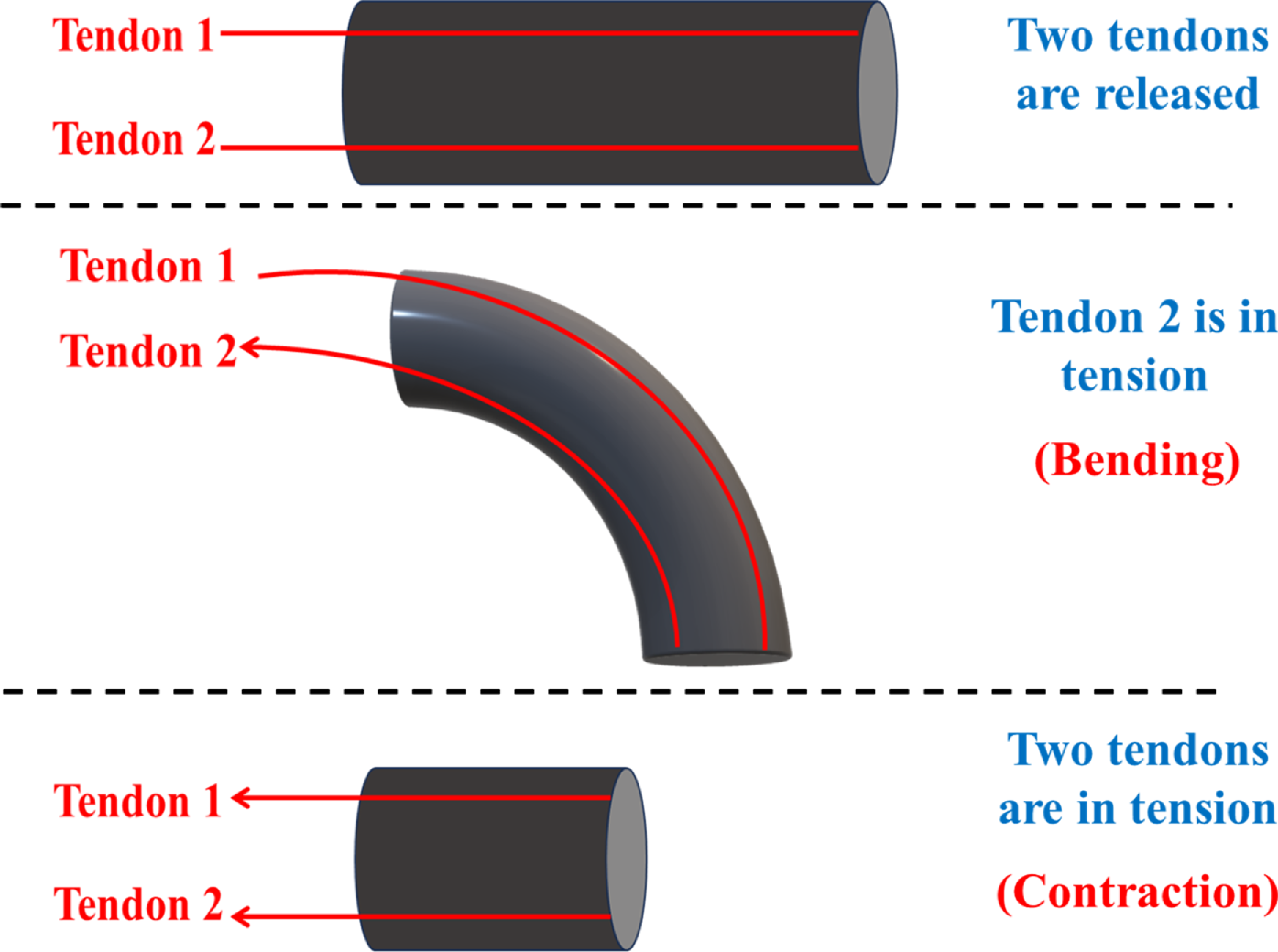
Figure 6. Actuation mechanism based on tendons for ECRs.
As tendons are not able to extend robots’ structures, there are some elements used to assist in terms of extension such as springs. Therefore, three tendons bend and contract the structure of an ECR by pulling one or two tendons and by pulling the three tendons, respectively. However, the initial status of the robot’s structure is in extension by a spring when all the tendons are no in tension [Reference Zhang, Qiu and Dai61, Reference Zhang, Qiu and Dai62]. On top of that, cables organized by several disks were used to actuate different ECRs in terms of bending and contraction only, and the structures of the ECRs are extended by springs as main components [Reference Wang and Zhang74, Reference Gao, Wang, Liu and Zheng75, Reference Su, Jin, Wu, Liu, Liu, Wang, Sun, Lam, Li, Tang and Kuang78, Reference Almanzor, Ye, Shi, Thuruthel, Wurdemann and Iida79]. Similarly, an ECR with couple-springs as backbones was driven for bending and compression by nine cables, but the couple of springs elongate the robot’s body [Reference Frazelle, Kapadia and Walker76, Reference Frazelle, Kapadia and Walker77]. Additionally, an ECR fabricated by rigid parts was actuated by three tendons for bending motion and contraction, pulling one or two tendons achieves the bending motion and pulling the three tendons at the same time achieves the contraction [Reference Zhuang, Zhang, Guan, Wei, Li, Tang, Kang, Song and Dai73]. However, these tendons are not capable of elongating the robot’s body, and it is elongated by three small springs in each segment. Similarly,
There are some ECRs that are actuated based on tendon actuation techniques in terms of bending and contraction only, but they are extended by permanent magnets. In this regard, an actuation method based on tendons was used to actuate ECRs for bending and contraction only, and they are extended by permanent magnets [Reference Amanov, Nguyen and Burgner-Kahrs82–Reference Neumann and Burgner-Kahrs84]. Bendable rods can also help to extend ECRs. Three flexible rods were used to actuate a soft ECR in terms of bending, extension, and contraction [Reference Wang, Tang, Xin, Xie, Guo and Laschi60]. Thus, the bending motion is achieved when one or two rods are in tension, the compression is achieved when all three rods are in tension, and the elongation is caused by pushing all three rods. As a conclusion of tendon actuation techniques in ECRs, actuation tendon techniques have some advantages such as being lightweight, the simplicity of control compared to the pneumatic actuators, the ability to achieve large bending depending on the specifications of an ECR, the ability to carry heavy payloads compared to the weight of an ECR, and the reliability that is gained by the employment of multiple tendons which can ensure that an ECR can operate if any tendon is damaged. However, there are some disadvantages such as disability to execute extension for some structures of ECRs, and sensitivity to external disturbances, which negatively influence the desired accuracy of position.
4.4. Tendon and pneumatic actuation
This section reviews the hybrid actuation technique of tendons and pneumatic actuators. Such a hybrid actuation technique uses the tendons for the bending motion and the contraction, and the pneumatic muscles are used for the extension, the stiffness variability, and can be used sometimes for only limited bending motion. In this regard, an ECR based on three parallel origami structures has three internal elastic tubes, each origami structure has one elastic tube as a pneumatic actuator, and the robot has three tendons as well [Reference Fathi, Vrielink, Runciman and Mylonas70]. The three tendons actuate the soft ECR in terms of bending and compression, the three tubes have the capability to extend the robot’s body and to support the robot’s structure in terms of its stiffness. Even though this soft ECR has the capabilities of bending, extension, contraction, and stiffness control, its structure is unreliable and unrobust for gripping heavy objects. A stronger ECR of two modules, where each module has three pneumatic muscles and three tendons [Reference Chairopoulos, Vartholomeos and Papadopoulos58]. This ECR is actuated by the three tendons for the bending motion and the contraction. However, the pneumatic muscles are at the normal atmospheric pressure, which can only keep the ECR extended when the tendons are released. Moreover, the stiffness of the ECR is constant as the pneumatic muscles are at atmospheric pressure.
In addition, three tendons and a pneumatic chamber were used to actuate an ECR. The pneumatic chamber was fabricated based on internal soft and unstretchable fabric inside an external rigid and foldable sheet [Reference Zhang, Tang, Fan, Xun, Wang and Chen69]. The three tendons bend and compress the robot’s structure, whilst the pneumatic chamber remains the robot extended and supports it in terms of stiffness. However, the bending, extension, and compression of this ECR are constrained by the external rigid sheet. Additionally, more tendons were used to provide independent actuation for each module of a three modules ECR in ref. [Reference Tao, Hu, Luo and Dong27]. Thus, nine tendons in conjunction with an internal elastic tube that acts as a pneumatic actuator were used to actuate an ECR. The nine tendons were divided between the three modules of the robot based on three tendons for each module, this benefits each module to be actuated independently. Furthermore, each module has its own air pressure input for the pneumatic actuator. This robot demonstrates satisfactory performance in terms of bending, extension, and contraction based on the dual actuation techniques. However, the independent actuation of each module of the ECR for both the tendons and the pneumatic actuator raises the difficulty of actuation control.
The dual actuation method based on tendons and pneumatic actuators combines the advantages and disadvantages of both actuation techniques. Based on that, ECRs that are actuated based on such dual actuation method would possess various advantages such as lightweight, ability for extension and contraction, efficiency to carry heavy payloads relative to their weight, variable stiffness, and reliable structure due to the presence of tendons which can ensure that ECRs can operate if any tendon is damaged. However, such an integrated actuation method causes several disadvantages such as complexity of control, the demand of compressors and pressure regulators, vibration and noise during inflating and deflating pneumatic actuators, and short lifetime of pneumatic actuators. On top of that, integrating tendon actuation and pneumatic actuation results in solving a few drawbacks of each other. For example, a soft structure of an ECR based on some pneumatic actuators is unreliable, but the presence of tendons makes it more reliable, and tendons can achieve large bending angles. At the same time, the presence of pneumatic actuators overcomes the issue of sensitivity of ECRs that are actuated by only tendons, this reduces the impact of surrounding disturbances.
4.5. Summary
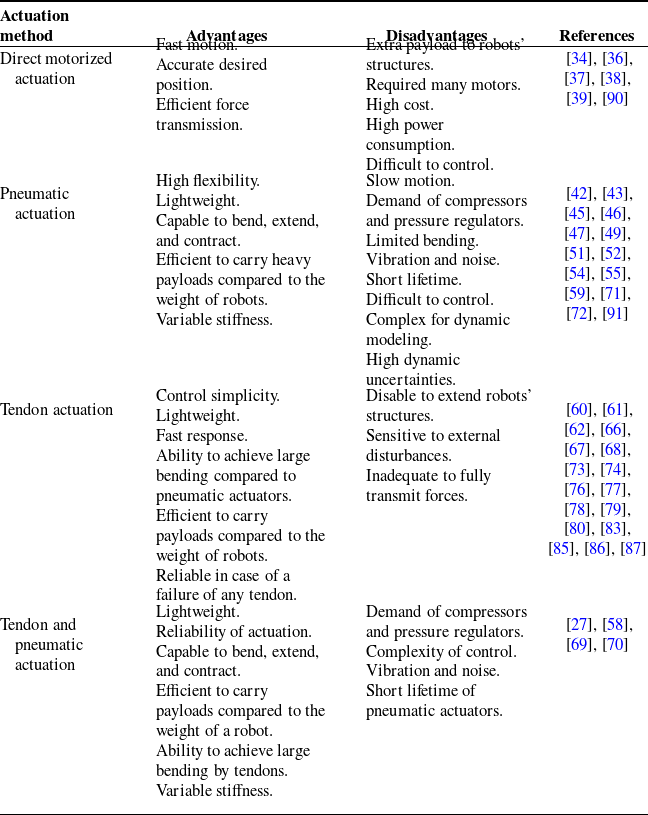
Table IV presents a comparison of performance parameters of actuation methods. The advantages and disadvantages of the actuation techniques that have been used in the literature to actuate ECRs are critically summarized in this section based on the categorizations of direct motorized actuation, pneumatic actuation, tendon actuation, and hybrid actuation technique of tendons and pneumatic actuators. For this purpose, Table V briefly presents the advantages and disadvantages of such actuation techniques. The direct motorized actuation can achieve quick and precise movements which improve efficiency and productivity, and this type of actuation can efficiently transfer forces or torques from motors to robots’ structures. However, this type of actuation needs moving actuation units which brings additional loads to the robots’ structures, and it requires many motors for efficient actuation which leads to an increase in the cost, power consumption, the control difficulty. Additionally, pneumatic actuators benefit ECRs with several features such as high flexibility, lightweight, efficiency to bend, extend, and contract, they can also lift heavier loads relative to their weights, and they have the advantage of variable stiffness. In contrast, they suffer from several disadvantages, such as slow axial and bending motion, need compressors and pressure regulator, cannot reach large bending positions, their inflating and deflating cause vibration and noise, they wear out and tear in a short period, and the difficulty of control. In addition, pneumatic actuators have dynamically complicated due to the presence of uncertainties during their stiffness changes.
Table IV. A comparison of performance parameters of actuation methods.
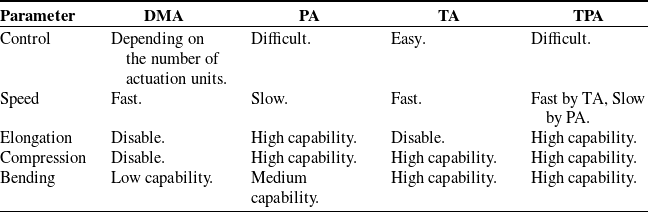
Abbreviations in the table are: Direction Motorized Actuation (DMA), Pneumatic Actuator (PA), Tendon Actuation (TA), and Tendon and Pneumatic Actuator (TPA).
Table V. Advantages and disadvantages of actuation methods of ECRs.
Tendons are popularly used in actuation of ECRs as they are simple in terms of control by offering straightforward control and easier to model and operate, tendons are also lighter than other actuation methods, they can provide quick motion, they can achieve large bending angles, they can effectively carry heavy loads relative to the weight of a robot, and they are fail-safe in case of a failure of any tendon. However, tendons have the limitation of disability to extend robots’ structures, they are sensitive to external disturbances which impact their performance, and they are inefficient in fully transmitting forces which limits them in some applications where high force transmission is critical. Combining tendons and pneumatic actuators as a hybrid actuation technique can have the advantages of both tendons and pneumatic actuators and they may solve each other problems. In light of this, this hybrid actuation technique brings the advantages of lightweight, actuation reliability, ability to bend, extend, and contract ECRs, efficiency to lift heavier payloads than the robots’ weight, ability to achieve large bending by employing tendons, and the stiffness variability by the presence of pneumatic actuators. However, there are still some disadvantages such as the need of pneumatic actuators to compressors and pressure regulators, the control complexity of pneumatic actuators, the vibration and noise during inflating and deflating the pneumatic actuators, and the short lifetime of pneumatic actuators.
5. Stiffness variability
Stiffness variability is the capability to adjust the rigidity of a robot’s structure based on a required task. The capability to adjust the stiffness is highly advantageous in various applications. It helps continuum robots to safely interact with humans and to manipulate different objects such as soft and fragile objects without deforming or breaking them. The effectiveness of stiffness variability makes continuum robots very promising in various applications. Generally, there are few methods that have been used for the purpose of stiffness variability of traditional continuum robots such as jamming layers [Reference Shah, Yang, Yuen, Huang and Kramer-Bottiglio90, Reference Giri, Bloom and Morimoto91], thermal responsive materials [Reference Yang, Geng, Walker, Branson, Liu, Dai and Kang92], mechanical structures [Reference Lin, Wang, Song, Li and Meng33], and pneumatic muscles [Reference Sokolov, Hošovský and Trojanová93, Reference Zaghloul and Bone94]. However, ECRs demand a particular stiffness variability method that can adjust the stiffness without sacrificing their advantages of extension and contraction. Therefore, the presence of stiffness variability in ECRs imposes several challenges in terms of mechanical design and actuation methods. The conflict between enabling extensibility and achieving stiffness variability in ECRs must be seriously considered to balance flexibility and structural strength. This challenge requires special materials, structures, and motion mechanisms. Additionally, along with integrating actuation for bending, compression, and extension, varying stiffness must work in harmony with these motion actuations, increasing the complexity compared to traditional continuum robots. Accordingly, this paper critically reviews the stiffness variability methods that have been used for ECRs in the literature.
5.1. Balloons and elastic tubes
Balloons and elastic tubes are very simple pneumatic actuators that can support ECRs in terms of stiffness variability. Figure 7 shows the mechanism of elastic tubes. Based on that, two long elastic balloons along an ECR were used to provide limited stiffness as they are the only two that cannot provide stiffness for the whole structure of the robot and they may burst in case of high pressure, the robot also cannot maintain its shortened position once the two balloons are pressurized [Reference Yarbasi and Samur45]. Increasing the number of balloons can provide better stiffness to the whole structure of a robot. Thus, three balloons in each segment were utilized which can better support the robot in terms of stiffness [Reference Herzig, Jones, Perez-Guagnelli and Damian46]. However, high pressure mostly causes an explosion of these balloons which limits their stiffness, and pressurizing these balloons results in the extension of the robot’s body and cannot increase its stiffness while it is compressed. Additionally, three soft tubes can only provide limited stiffness due to the smaller sizes of the inflatable tubes compared to the whole size of the robot’s structure [Reference Wang, Wang, Wang, Meng, Liang and Xu47], the robot also cannot remain compressed if the stiffness is increasing by the air pressure. Similarly, inflatable pouches were used to support an ECR in terms of stiffness, but they are small and can only provide limited stiffness to the robot’s structure [Reference Robertson, Kara and Paik72]. Strong elastic tubes which can afford high pressure have better ability to provide higher stiffness. Thus, an ECR was supported in terms of stiffness by three strong elastic tubes [Reference Tutcu, Baydere, Talas and Samur42, Reference Talas, Baydere, Altinsoy, Tutcu and Samur43], these elastic tubes can provide reasonable stiffness to the ECR, but increasing the stiffness of these elastic tubes causes extending the robot’s structure.
Some researchers have utilized tendons with elastic tubes, this combined method can maintain an ECR compressed by the tension of the tendons when its stiffness is increased by pressurizing the tubes. Based on that, an ECR has three tendons and three elastic balloons along its structure [Reference Fathi, Vrielink, Runciman and Mylonas70]. This ECR can increase its stiffness by inflating the three balloons and at the same time can keep a desired contraction of its length when the three tendons are in tension. However, the stiffness is limited in this ECR as a high pressure may cause an explosion of these three elastic balloons. Based on the literature, balloons and elastic tubes have been used for the stiffness variability of ECRs due to their simplicity. However, they cannot provide high stiffness to the structures of ECRs.
5.2. Braided muscles
Braided muscles consist of an inner rubber tube and a braided sleeve that covers and supports the tube in order to operate at high pressure as presented in Figure 8. Based on that, an ECR uses three parallel braided muscles which can provide high stiffness [Reference Gilbert and Godage59]. However, the drawback of this ECR is that increasing the stiffness leads to always extending the robot’s length. In addition, other braided muscles that have the capability to provide high stiffness were developed in refs.[Reference Yukisawa, Ishii, Nishikawa, Niiyama and Kuniyoshi54–Reference Morimoto, Nishikawa, Niiyama and Kuniyoshi56] for ECRs, these pneumatic actuators can operate at high pressure as their internal elastic tubes are supported by external bellows and braided layers. However, the long body of these ECRs leads to a low total stiffness of the whole robots, another disadvantage is that the robots cannot increase their stiffness and maintain their contracted status at the same time. The braided muscles can provide high stiffness due to the support of external braided layers. However, there is a common issue of these braided muscles is the diameter expansion in the presence of a high pressure.
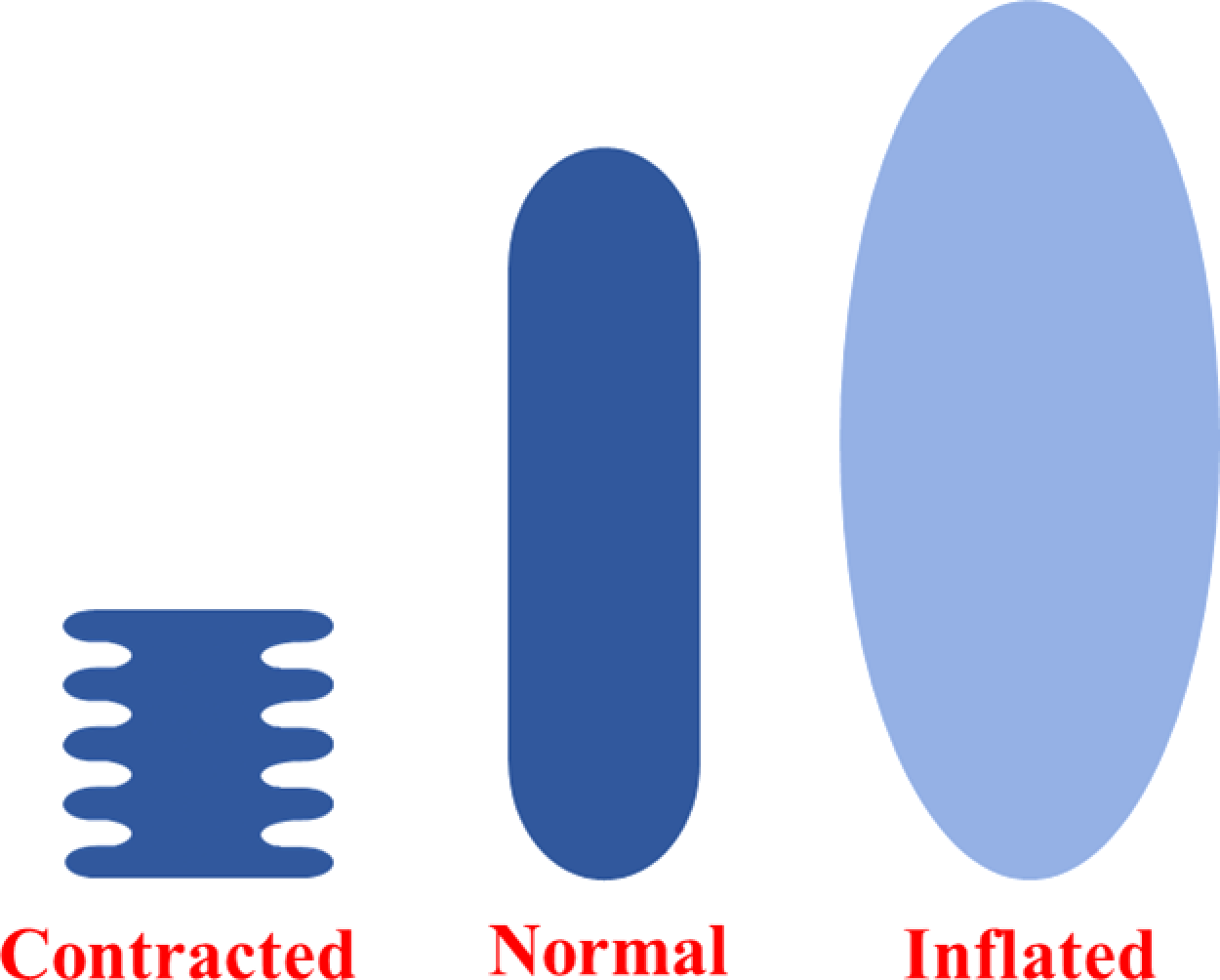
Figure 7. Example of elastic tubes and their mechanism.
5.3. Creased bellows
Bellows with creases are a type of expandable pneumatic actuators that are made of flexible materials and designed to expand and contract to make changes in their lengths, Figure 9 presents creased bellows and their mechanism. A simple assembly of six bellows forms an ECR which can adjust the stiffness of the robot’s structure by increasing and decreasing the pressure of the utilized six bellows [Reference Takane, Tadakuma, Yamamoto, Konyo and Tadokoro49]. In contrast, this ECR based on bellows cannot afford high pressure due to its weak mechanical structure. Additionally, increasing the stiffness of this ECR based on bellows always leads to extending the robot’s body. A better organized structure of another ECR using six bellows which can provide stiffness to the robot’s structure, but it does not remain compressed when inflating the bellows for the purpose of increasing the stiffness [Reference Chen, Duanmu and Wang52]. Increasing the number of segments and providing independent stiffness variability for each segment was proposed in ref. [Reference Liu, Liu, Zou, Wang, Fang, Yi and Wang71]. This advantage of independent stiffness variability for each segment brings the opportunity to adjust the stiffness in various positions along the robot’s structure as required. However, this robot also cannot be contracted when its stiffness is increased.
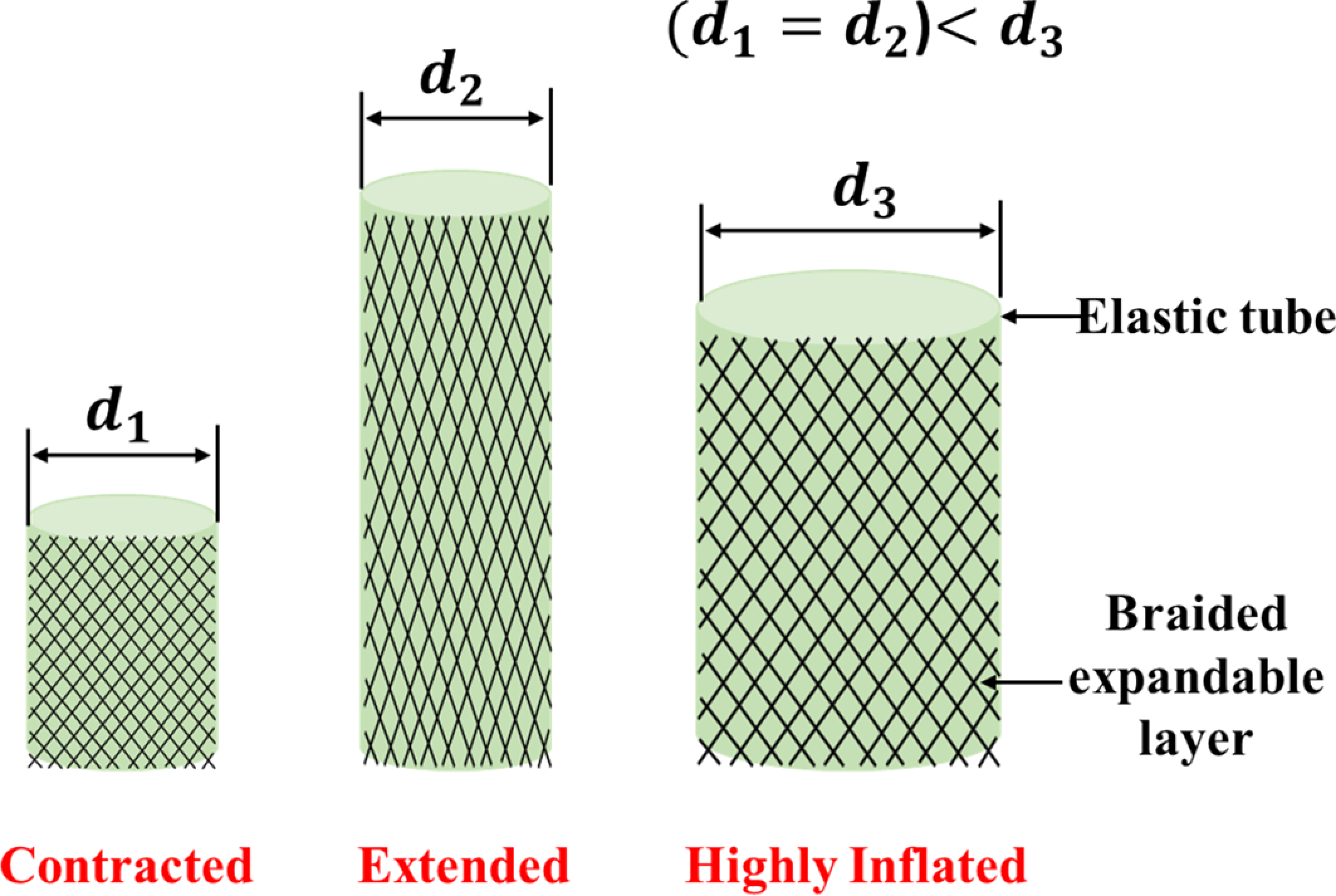
Figure 8. Example of braided muscles and their mechanism.
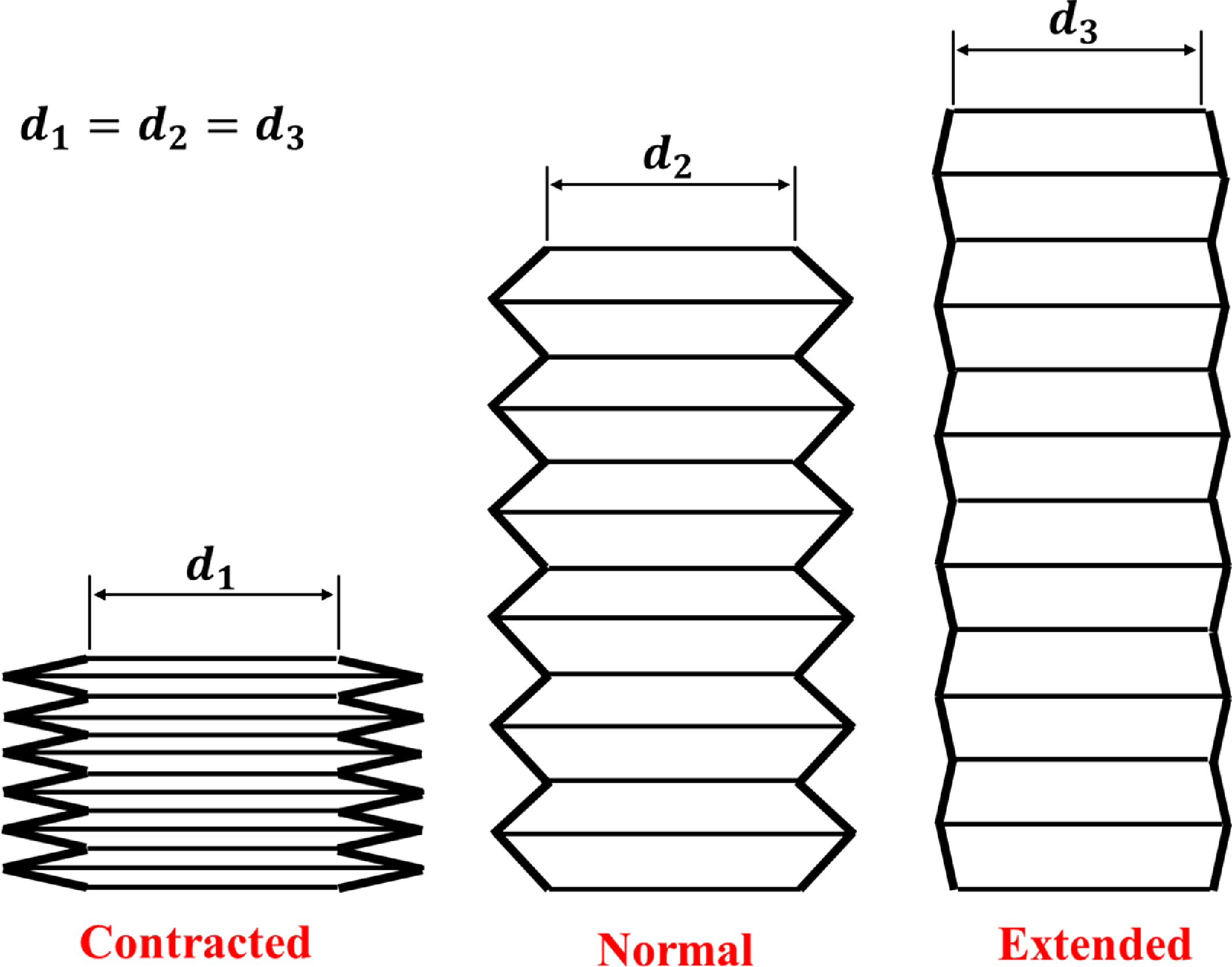
Figure 9. Example of creased bellows and their mechanism.
The presence of tendons in such robots helps to overcome the issue of maintaining robots’ structures contracted at high stiffness. This was implemented by using tendons in an ECR based on an inflatable tube with creases, this robot is able to adjust its stiffness to any desired length due to the existence of the tendons [Reference Park, Kim, Yu, Cho, Kang, Byun, Jeong and Cho95]. There was a more complicated structure of nine tendons and three internal tubes with creases along their lengths of an ECR, the nine tendons and the three creased tubes are divided into three tendons and one creased tube in each segment with independent actuation of each segment [Reference Tao, Hu, Luo and Dong27]. Thus, the tendons ensure that each segment can increase its stiffness in different contracted positions. However, the independent actuation of each segment complicates the actuation process of the robot. As a conclusion, bellows with creases are advantageous over balloons, normal elastic tubes, and braided muscles as they can increase their stiffness with minimized expansion of their diameters due to the availability of creases. Furthermore, the creased bellows can provide higher stiffness than the balloons and the normal elastic tubes.
5.4. Summary
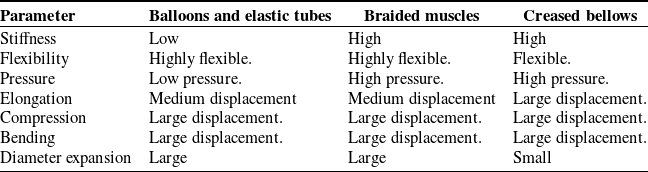
Based on the literature review, pneumatic actuators are widely used to vary the stiffness of ECRs as they are suitable for the extension and contraction of such robots. The stiffness of some pneumatic actuators such as balloons and elastic tubes is limited because they can only operate at low pressure, and high pressure can cause an explosion. In addition, braided muscles which consist of inner elastic tubes covered by expandable braided layers can provide high stiffness through the application of high pressure. However, the high pressure causes a diameter expansion of these braided muscles, leading to the generation of tension forces at their two ends, resulting in the overall shortening of the ECRs’ lengths. Bellows with creases are another type of pneumatic actuators that can reasonably support ECRs in terms of stiffness, they can provide higher stiffness than balloons and elastic tubes. Additionally, bellows do not generate tension forces in their ends when they are extremely pressurized due to their expandable creases which avoids shortening the overall length of the ECRs. Another significant phenomenon observed in ECRs that rely solely on pneumatic actuators as their primary actuation method is the extension of their structure when increasing stiffness. This implies that such ECRs cannot simultaneously increase their stiffness and maintain contracted positions. Conversely, some ECRs benefit from employing a hybrid actuation technique comprising pneumatic actuators and tendons. Tendons assist in keeping the robot’s structure contracted at a desired position while, concurrently, pressurizing the pneumatic actuators enables an increase in stiffness. Table VI demonstrates the relationship between these pneumatic actuators and their relevant performance parameters. It shows that there is a trade-off between the flexibility to achieve large motion and the stiffness that a particular pneumatic actuator can provide.
Table VI. Stiffness variability and relevant performance parameters.
6. Control methods
6.1. Traditional control
Based on the literature, ECRs still do not have yet high attention in using advanced controllers for fast and accurate performance. The literature shows that the current research attention on ECRs is on their design and structure. Few recent studies are traditionally actuated ECRs by using simple components such as valves just to test their flexibility to achieve bending and axial motions [Reference Liu, Ma, Ma and Zuo96]. In contrast, there are some studies used basic control methods and other controllers. A soft ECR based on pneumatic actuators was controlled by an Arduino board to control the pressure regulators to perform required bending, elongation, and contraction [Reference Coad, Blumenschein, Cutler, Zepeda, Naclerio, El-Hussieny, Mehmood, Ryu, Hawkes and Okamura40, Reference Yarbasi and Samur45]. An Arduino board also was used to control another soft ECR which has a hybrid actuation system based on pneumatic actuators and tendons [Reference Tao, Hu, Luo and Dong27], the Arduino board controls the actions of air pumps for extension and stiffness variability and the actions of motors to change the tendons’ lengths for bending and contraction. In addition, an ECR based on origami structure and soft actuators was controlled by Arduino [Reference Robertson, Kara and Paik72, Reference Park, Kim, Yu, Cho, Kang, Byun, Jeong and Cho95]. Control methods based on Arduino boards are advantageous in terms of use simplicity and cost. However, they are not suitable for large computation and high-performance applications, they are also limited in terms of inputs and outputs which cannot be used for complex systems.
A microcontroller was used to control the pneumatic system of a soft ECR consisting of three pneumatic actuators [Reference Zhang, Wang, Wang, Meng and Liang48]. Similarly, a soft ECR based on six parallel pneumatic actuators was controlled by a microcontroller to regulate the pressure for required bending and axial motions [Reference Chen, Duanmu and Wang52]. The microcontroller controls the switching process of air pressure between the three pneumatic actuators to produce the required motion of crawling. In addition, a microcontroller was employed to control an ECR based on origami soft actuators [Reference Zhang, Tang, Fan, Xun, Wang and Chen69, Reference Liu, Liu, Zou, Wang, Fang, Yi and Wang71, Reference Jin, Li, Wang, Wang, Cai, Tian and Zhang97]. Microcontrollers might not be effective for complex and multi-tasking performance in robotics. This is due to the slow data processing which limits the use of external devices such as sensors and cameras. Such drawback leads to slow and inaccurate performance.
ECRs consist of pneumatic actuators were controller by a traditional CompactRIO real time controller for bending and extension [Reference Talas, Baydere, Altinsoy, Tutcu and Samur43, Reference Baydere, Talas and Samur44]. However, its large size and heavy weight are the main disadvantages which limit its use specifically applications that are sensitive in terms of weight. Proportional–integral–derivative (PID) controller was designed to control an ECR consists of three soft actuators for pressure control to achieve required bending and axial motion [Reference Fathi, Vrielink, Runciman and Mylonas70]. PID was also used to control a soft ECR by regulating the air pressure [Reference Greer, Morimoto, Okamura and Hawkes98]. In addition, another ECR with four segments was controlled by PID controller to control the pressure valves in order to accomplish desired bending and axial motion [Reference Yang and Asbeck99]. PID is a traditional controller, it is not robust enough for systems with uncertain parameters, and it is not suitable for multi-inputs multi-outputs systems. A nonlinear model predictive control (NMPC) was utilized to stabilize a soft ECR for desired navigation, bending, and contraction [Reference El-Hussieny, Hameed and Zaky41], the NMPC was developed depended on a kinematic model. This NMPC does not demonstrate very accurate performance as it is a model-based controller depending on the kinematic model, and it is very challenging to obtain a detailed dynamic model of such soft ECR.
6.2. Intelligent control
Neural network (NN) control algorithm was used for position control of an ECR based on pneumatic actuators, the NN was trained based on inverse kinematic model of the ECR and demonstrate good position control as presented in ref. [Reference Al-Ibadi, Nefti-Meziani, Davis and Theodoridis89], this performance could be improved by using a dynamic model with good dynamic insights. A model-based reinforcement learning based on NN was utilized to develop a closed-loop control policy for tip trajectory of a soft ECR [Reference Thuruthel, Falotico, Renda and Laschi100]. However, this model-based controller depends on forward dynamic model which is sensitive and causes significant inaccuracy for any small error knowledge of the system. In addition, an ECR was controlled by a model-based reinforcement learning based on NN and relies on a static mathematical model [Reference Centurelli, Rizzo, Tolu and Falotico101], this research performs open loop control for 2D bending motion and depends on the static model resulting to an inaccurate actual control response.
Due to the difficulty of obtaining accurate mathematical models of ECRs, some researchers investigated model-free controllers. A recent study which used a model-free reinforcement learning (MFRL) based on Deep Deterministic Policy Gradient (DDPG) was employed to control a soft ECR [Reference Li, Wang and Kwok102]. Another MFRL based on Soft Actor-Critic (SAC) and Q-function was proposed to control a soft ECR based on pneumatic actuators [Reference Morimoto, Nishikawa, Niiyama and Kuniyoshi56]. Similarly, the MFRL based on SAC was used for another ECR [Reference Morimoto, Ikeda, Niiyama and Kuniyoshi57]. In addition, a soft ECR was controlled by a MFRL based on Q-function [Reference Zhang, Cao, Zilberstein, Wu and Chen103], but the policy was trained without considering the specific materials and structural properties of the soft ECR for quick training purpose without minimizing the control algorithm efficiency. Similarly, a MFRL based on Q-function was utilized to control a soft ECR for only 2D bending motion [Reference You, Zhang, Chen, Liu, Wang, Jiang and Chen104]. The proposed MFRL is to overcome the drawback of obtaining an efficient mathematical model of such soft ECRs due to their infinite DOFs and uncertain parameters. However, it could be difficult to collect sufficient data for complicated control performance for ECRs due to potential structural fatigue.
7. Future prospects
This section addresses the research gap and related research question of ECRs in terms of their mechanical structure, actuation methods, and stiffness variability as detailed in the following subsections.
7.1. Mechanical structure
Mechanical structure of ECRs plays an important role in order to efficiently achieve the motions of bending, extension, and contraction. Thus, different ECRs were designed in different ways for the purpose of achieving these highly demanded motions. Some ECRs have been designed by rigid parts with many revolute and prismatic joints to have enough flexibility for the robot to perform bending, extension, and contraction. Such ECRs can possess reliable structures, but these structures are not flexible enough for satisfactory motions especially the bending motion, and they do not have the advantage of variable stiffness [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto15, Reference Zhuang, Zhang, Guan, Wei, Li, Tang, Kang, Song and Dai73, Reference Zhang, Shi, Huang, Wu, Zhao, Yang, Rajabi, Wu, Peng and Wu86]. On the other hand, soft components such as balloons, elastic tubes, braided muscles, and bellows are capable of achieving satisfactory extension and contraction, they are also advantageous in terms of variable stiffness. However, soft components are damageable and have less reliability [Reference Herzig, Jones, Perez-Guagnelli and Damian46, [Reference Fathi, Vrielink, Runciman and Mylonas70, Reference Liu, Liu, Zou, Wang, Fang, Yi and Wang71]. Based on that, the current ECRs do not possess yet the essential features of flexibility and reliability simultaneously. Thus, there is an inherent trade-off between flexibility and structural reliability of ECRs. It is observed that enhancing flexibility leads to sacrifice structural reliability and vice versa. This is due to the traditional method of design of such robots based on engineering judgment and predefined materials. Thus, the lack of systematic methods to design such robots and parameter optimization lead to the current trade-off between the flexibility and structural strength. Based on that, this research addresses the question: What is the suitable systematic method for design and dimensional optimization of ECRs to efficiently develop an ECR that exhibits both flexibility and structural strength, thereby enhancing their overall performance in various applications?
7.2. Actuation and control method
Actuation methods are required to automate ECRs and at the same time to assist in accomplishing satisfactory motions and variable stiffness. Some ECRs are directly attached to motors through gears which is only suitable for ECRs that are designed by rigid parts [Reference Matsuda, Mavinkurve, Kanada, Honda, Nakashima and Yamamoto34]. Pneumatic actuators have the advantages of flexibility and variable stiffness, but they have the disadvantages of slow speed and control difficulty [Reference Chen, Duanmu and Wang52, Reference Yukisawa, Nishikawa, Niiyama, Kawahara and Kuniyoshi55]. Tendons have the advantages of fast speed, flexibility, and control simplicity, but they are disadvantageous in terms of variable stiffness [Reference Xu, Peyron, Kim and Burgner-Kahrs68, Reference Zhuang, Zhang, Guan, Wei, Li, Tang, Kang, Song and Dai73, Reference Wu, Yang, Li, Zhao, Wu, Zhu and Zhang85]. In addition, combining tendons and pneumatic actuators as a hybrid actuation method for ECRs is very beneficial to have all the highly demanded advantages of satisfactory motions in terms of speed and position, and variable stiffness [Reference Tao, Hu, Luo and Dong27, Reference Zhang, Tang, Fan, Xun, Wang and Chen69, Reference Fathi, Vrielink, Runciman and Mylonas70]. Based on that, the hybrid actuation method of tendons and pneumatic actuators is appropriate for ECRs. However, the current ECRs based on the hybrid actuation method of tendons and pneumatic actuators are controlled by simple control methods and model-based controllers [Reference Tao, Hu, Luo and Dong27, Reference Chairopoulos, Vartholomeos and Papadopoulos58, Reference Zhang, Tang, Fan, Xun, Wang and Chen69, Reference Fathi, Vrielink, Runciman and Mylonas70]. Such traditional controllers are not effective to ensure fast and satisfactory motion. In addition, it is extremely hard to obtain an efficient mathematical model of ECRs and pneumatic actuators as they have infinite DOFs and uncertain parameters. Therefore, design a controller based on such inefficient models results to ineffective control performance. Based on that, a model-free control algorithm such as a reinforcement learning based control could be a promising solution to overcome the problem of developing an effective model-based controller [Reference Morimoto, Nishikawa, Niiyama and Kuniyoshi56, Reference Morimoto, Ikeda, Niiyama and Kuniyoshi57, Reference Li, Wang and Kwok102, Reference You, Zhang, Chen, Liu, Wang, Jiang and Chen104]. However, such model-free controllers suffer from collecting sufficient data from experimental works particularly for ECRs to perform complex control performance. This raises the research question: How can advanced machine learning techniques compensate for the missing dynamics in dynamic models of ECRs, thereby enhancing overall control performance?
7.3. Stiffness variability
The variability of stiffness in ECRs is currently present due to the existence of pneumatic actuators. These available pneumatic actuators are traditional, and they basically increase the stiffness of ECRs by increasing the pressure and vice versa [Reference Tutcu, Baydere, Talas and Samur42, Reference Wang, Wang, Wang, Meng, Liang and Xu47]. Based on the detailed review of the available pneumatic actuators for the stiffness variability of ECRs in section 5, the pneumatic actuators based on creased bellows are overall better than the balloons, elastic tubes, and braided muscles for ECRs [Reference Chen, Duanmu and Wang52], this is because bellows can provide reasonable stiffness and do not impact the maximum extension of ECRs when they are highly pressurized. However, the current bellows do not have automatic reactions to external disturbances in order to adjust their stiffness accordingly such as touching an object or a sudden load to lift instantly. In addition, the uncertainty caused by the stiffness change imposes the challenge of control by conventional model-based controllers. Based on this, a research question that can be addressed is: How can advanced machine learning techniques automate stiffness variability and overcome uncertainties when adjusting internal pressure and lifting external payloads?
8. Conclusion
This paper critically reviews ECRs in terms of mechanical design, actuation techniques, and stiffness variability. ECRs have various designs, and they are classified in this paper into four types. The first type is based on the principle of storage and deployment, which depends on pushing the robot’s body to the workspace and pulling it back to its storage. This type of ECR is manufactured by rigid parts whose length and stiffness are not variable. The second type is soft ECRs, which are mainly designed by soft components such as balloons, elastic tubes, braided muscles, and bellows. The soft ECRs have variable length and stiffness, but their structures are not reliable. ECRs based on origami structures are the third type covered in this paper. Origami structures are flexible and can achieve bending, extension, and contraction, but their structures are complicated, unreliable, and some designs are unsuitable for stiffness variability. Lastly, ECRs based on compressible and extensible backbones. These last ECRs are somehow flexible and reliable, but they are non-variable stiffness and limited in terms of motion. The actuation techniques of ECRs are reviewed, including direct motorized actuation, pneumatic actuation, tendon actuation, and hybrid actuation of tendons and pneumatic actuators. Based on the review of the actuation techniques, the hybrid actuation of tendons and pneumatic actuators is superior to the others. The stiffness variability of ECRs is mainly based on pneumatic actuators such as the elastic tubes, balloons, braided muscles, and bellows. The bellows are more appropriate than the elastic tubes, the balloons, and the braided muscles for the stiffness variability of ECRs. Additionally, the paper discusses the control methods of ECRs. Eventually, this paper addresses a few research questions for future improvement of ECRs in terms of their mechanical structure, actuation techniques, and stiffness variability, as discussed in detail in Section 7.
Author contribution
EAA wrote the article. DL provided overall supervision of this manuscript. DL and YF reviewed and improved the article.
Financial support
This work was supported by the University of Technology Sydney (UTS).
Competing interests
The authors declare no competing interests exist.
Ethical approval
None.
















 Open access
Open access