


Introduction
Precision agriculture (PA) revolutionized crop production in the 20th century and will continue to impact the future of crop production. It automated management of agricultural fields by using information technology to integrate data from multiple sources to modify inputs based on site- specific variability (Bongiovanni and Lowenberg-Deboer Reference Bongiovanni and Lowenberg-Deboer2004; National Research Council 1997; Torres-Sánchez et al. Reference Torres-Sánchez, López-Granados, De Castro and Peña-Barragán2013). PA accounts for within-field variability of soil and moisture with yield, nutrient, pest, and disease to provide a site-specific management scheme designed to minimize inputs and maximize outputs with preservation of the environment (Huang and Thomson Reference Huang and Thomson2015; Torres-Sánchez et al. Reference Torres-Sánchez, López-Granados, De Castro and Peña-Barragán2013; Yao and Huang Reference Yao and Huang2013). Precision weed management (PWM) is an application of PA accounting for within-field variability of weed infestation and applying weed management inputs based on site-specific variability.
Unmanned aerial vehicles (UAVs) provide high spatial-resolution data and have been developed and widely used for agriculture and precision crop management (Herwitz et al. Reference Herwitz, Johnson, Dunagan, Higgins, Sullivan, Zheng, Lobitz, Leung, Gallmeyer, Aoyagi, Slye and Brass2004; Huang et al. Reference Huang, Thomson, Hoffman, Lan and Fritz2013; Huang and Reddy Reference Huang and Reddy2015). Accordingly, this technology has been developed and used for weed management (Huang et al. Reference Huang, Howard, Pennington, Reddy and Thomson2016; Peña et al. Reference Peña, Torres-Sanchez, Serrano-Perez, de Castro and Lopez-Granados2015; Rasmussen et al. Reference Rasmussen, Nielsen, Garcia-Ruiz, Christensen and Streibig2013). Although UAVs currently have limitations such as flight time (i.e., limited by battery power) and processing time of the imagery, there is growing interest in the agricultural community in using UAVs as a decision support tool for PA applications, including site-specific weed management.
This article presents an overview on development and applications of UAV low-altitude remote sensing for PWM. Specifically, we discuss the applications of this technology to detect weed infestations, crop injury from dicamba, and the potential application for glyphosate-resistant (GR) and glyphosate-susceptible (GS) weed differentiation in cotton (Gossypium hirsutum L.) and soybean [Glycine max (L.) Merr.] production systems.
Remote Sensing Scales for Weed Identification
Remotely sensed data acquired with ground-based aircraft and satellite imaging sensors have been used for weed management (de Castro et al. Reference de Castro, Jurado-Expósito, Peña-Barragán and López-Granados2012; Pinter et al. Reference Pinter, Hatfield, Schepers, Barnes and Moran2003; Shaw Reference Shaw2005; Torres-Sánchez et al. Reference Torres-Sánchez, López-Granados, De Castro and Peña-Barragán2013). Table 1 shows the remote sensing systems on satellites, airplanes, UAVs, and ground-based platforms available for weed management. The major challenges affecting manned aircraft and satellite imaging systems for PA, including weed management, are appropriate spatial and temporal resolution of imagery and acquisition of good imagery during partly cloudy conditions. Ground-based systems provide high spatial-resolution data; nevertheless, they are mostly good for spot measurements and are often limited by slow movement from place to place and ground-surface conditions. The UAVs offer an unique platform for data acquisition (remote sensing), monitoring (e.g., weed infestations), and applying management inputs (e.g., pesticides).
Table 1 Description and applications of remote sensing systems for weed management.
Weed detection is important for site-specific management and is fundamental to other applications related to PWM. In the past, we have developed and applied an airborne multispectral imaging system mounted in an agricultural aircraft to determine crop response to glyphosate sprays. With a spatial resolution of 25 cm pixel−1 from a typical flight altitude of 300 m, the system could not differentiate the mixed signatures of crop and weeds (Huang et al. Reference Huang, Reddy, Thomson and Yao2015). Peña et al. (Reference Peña, Torres-Sanchez, Serrano-Perez, de Castro and Lopez-Granados2015) conducted a research study on weed seedling detection using red–green–blue (RGB) and multispectral cameras on a small UAV and reported that if the discrimination of individual weed plants is the objective, then the pixel size should be approximately 1 to 4 cm. That pixel size required flight altitudes of 40 to 100 m for the researcher’s RGB camera and 40 to 60 m for their multispectral camera. However, if the objective is weed patch detection, the pixel size of remotely sensed images could be 5 cm or even greater, corresponding to a flight altitude of 100 m or higher for both of their cameras. Our findings from the study of weed detection also indicated that weed patches were distinguishable from crops with RGB and color–infrared (CIR) images acquired with our cameras on a small multirotor UAV and a fixed-wing UAV flown at an altitude of less than 50 m; the spatial resolution was less than 5 cm pixel−1 (Huang and Reddy Reference Huang and Reddy2015). Therefore, the scale of remote sensing for detection of weed plants or patches depends on sensors and observation altitudes, and the flight mission must be catered to the specific objectives to optimize efficient use of UAVs for weed identification (Hung et al. Reference Hung, Xu and Sukkarieh2014; Mesas-Carrascosa et al. Reference Mesas-Carrascosa, Torres-Sánchez, Clavero-Rumbao, García-Ferrer, Peña, Borra-Serrano and López-Grandos2015; Peña et al. Reference Peña, Torres-Sanchez, Serrano-Perez, de Castro and Lopez-Granados2015; Torres-Sánchez et al. Reference Torres-Sánchez, López-Granados, De Castro and Peña-Barragán2013).
Assessment of Crop Injury from Dicamba with UAV Imagers
Dicamba is an herbicide used for POST control of several broadleaf weeds in corn (Zea mays L.), grain sorghum [Sorghum bicolor (L.) Moench], small grains, and non-cropland. Dicamba-resistant (DR) soybean and DR cotton are commercially available now. DR crops provide new options to combat weeds resistant to glyphosate, the most widely used herbicide (Green Reference Green2014; Reddy and Jha Reference Reddy and Jha2016). Upon commercial launch of DR-trait soybean and cotton, off-target dicamba drift from routine use in DR crops onto susceptible crops became a major concern (Barber Reference Barber2017; Steckel Reference Steckel2017). The research farm of USDA Agricultural Research Service (USDA-ARS) in the Mississippi Delta actually encountered some very serious herbicide damage in 2017 from a neighboring farmer’s field where DR soybean had been planted. It appears that several of the USDA-ARS soybean fields took serious drift from an application of dicamba (B Scheffler, e-mail communication). It can be predicted that, with the adoption of DR crop system in the near future, the concern would be much greater, with significantly increased numbers of dicamba drift complaints.
In previous studies, CIR systems mounted in manned fixed-wing aircraft have been used to assess crop injury from off-target drift of aerially applied glyphosate for soybean, cotton, and corn (Huang et al. Reference Huang, Thomson, Ortiz, Reddy, Ding, Zablotowicz and Bright2010, Reference Huang, Reddy, Thomson and Yao2015) production systems. Submeter spatial resolution of aerial CIR imagery limited the analysis and assessment of the crop herbicide injury (Huang and Reddy Reference Huang and Reddy2015). UAVs provide a platform that can carry imaging sensors to provide centimeter-level and even millimeter-level spatial-resolution imagery with three-dimensional stereo vision capability to better differentiate weeds over the canopy of the crop field (Huang et al. Reference Huang, Thomson, Hoffman, Lan and Fritz2013; Huang and Reddy Reference Huang and Reddy2015; Torres-Sánchez et al. Reference Torres-Sánchez, López-Granados, De Castro and Peña-Barragán2013).
For detection of crop dicamba injury, a field experiment was conducted in 2014 in a soybean field at the research farm of the USDA-ARS Crop Production Systems Research Unit in Stoneville, MS (33.446485 N, −90.869923 W) (Huang et al. Reference Huang, Howard, Pennington, Reddy and Thomson2016). Five weeks after dicamba treatment (WAT), a series of digital RGB color images were acquired with a GoPro camera (GoPro Inc., San Mateo, CA) on a small octocopter flying over the field at an altitude of 45 m to offer a 2.8 cm pixel−1 ground resolution with a 95° field-of-view low-distortion lens. Also, at 1.5 WAT and 10 WAT, digital RGB color images were acquired by an unmodified Canon digital camera, and near-infrared (NIR) images were taken with a customized Canon digital camera with an NIR filter on a fixed-wing remotely controlled plane over the field at an altitude of 80 m, resulting in 4 cm pixel−1 ground spatial resolution. On both flights with the Canon cameras, RGB images and NIR images were restacked to generate CIR images of the field. Vegetation indices were extracted from the RGB and CIR images, including normalized difference photosynthetic vigor ratio (NDPVR) (Warren and Metternicht Reference Warren and Metternicht2005) and normalized difference vegetation index (NDVI) (Rouse et al. Reference Rouse, Haas, Schell and Deering1973).
The results indicated that regardless of weeks after treatment, UAV type, and sensor/image type, all indices were highly correlated with the soybean yield over the field (R2=0.94 to 0.96) (Huang et al. Reference Huang, Howard, Pennington, Reddy and Thomson2016). Figure 1 shows that the NDPVR extracted from the GoPro RGB images monotonically decreases with the increase in dicamba spray rates at 5 WAT. Figure 2 shows that the NDVI extracted from Canon CIR image data monotonically decreases with the increase of the dicamba spray rates at 1.5 and 10 WAT. All the figures illustrate that the image data can characterize dicamba sprays well and demonstrate that the high-resolution UAV image data performed consistently well in assessing crop response to dicamba within the soybean yield. Statistically significant differences have been reported in vegetation index values of weeds, crop, and bare soil derived from camera systems mounted on UAVs (Torres-Sánchez et al. Reference Torres-Sánchez, López-Granados, De Castro and Peña-Barragán2013), supporting vegetation indices as a technique to use for crop, weed, and soil discrimination. Other researchers have demonstrated the use of a GoPro camera mounted on a quadrocopter UAV to identify weeds in sugarcane (Saccharum officinarum L.) (Yano et al. Reference Yano, Alves, Santiago and Mederos2016).
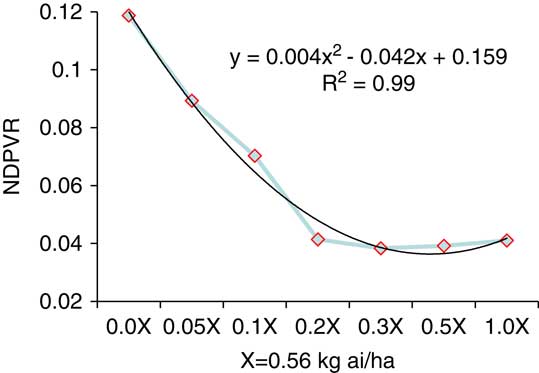
Figure 1 NDPVR vs. dicamba spray rates at 5 WAT.
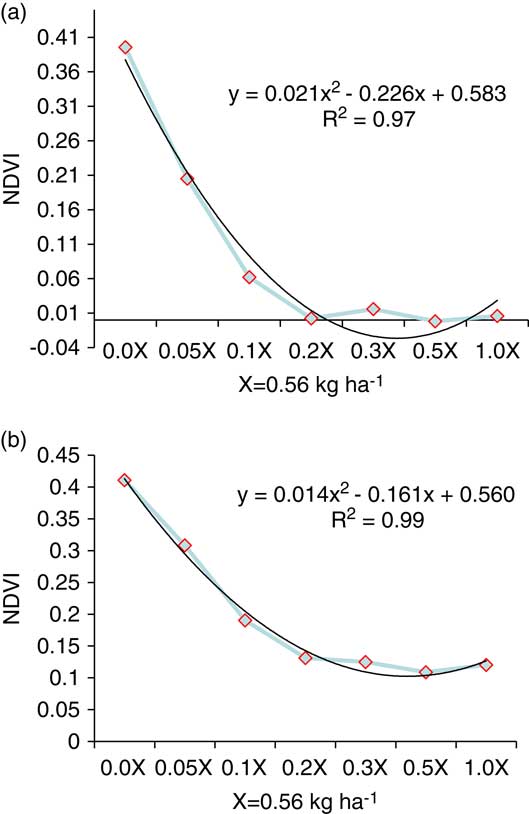
Figure 2 NDVI vs. dicamba spray rates at 1.5 WAT (a) and 10 WAT (b).
GR and GS Weed Differentiation with UAV Imagers
Glyphosate is the most widely used herbicide, with increased frequency of use and amount in fields planted with GR crops. Repetitive and intensive use of glyphosate has exerted a high selection pressure on weed populations, resulting in the evolution of 37 GR weed species in the world (Heap Reference Heap2017). Ten of them have appeared in Mississippi (Heap Reference Heap2017).
Hyperspectral plant-sensing techniques have been developed to detect GR and GS Palmer amaranth (Amaranthus palmeri S. Wats.) and Italian ryegrass [Lolium perenne L. ssp. multiflorum (Lam.) Husnot] in the greenhouse and the field with detection rates of 90% and 80%, respectively (Lee et al. Reference Lee, Huang, Nandula and Reddy2014; Reddy et al. Reference Reddy, Huang, Lee, Nandula, Fletcher, Thomson and Zhao2014). However, in-field hyperspectral plant sensing is still time-consuming and laborious, because the current sensors are either operated on a slow-moving tractor for imaging certain areas in the field or handheld by a technician to measure canopy spectra at certain points in the field. This tedious manner of hyperspectral data acquisition is an obstacle to extending the research results to practical uses. Use of UAV is an innovative way to fly over a crop field to rapidly determine the distribution of weeds. We are undertaking a research project to mount portable, digital, multispectral and hyperspectral cameras on a small UAV to fly at a very low altitude to quickly determine the distribution of naturally grown GR and GS weeds in a soybean field.
For this project, GR soybean (Asgrow® ‘AG 4332’) was planted in April 2017 on a 4.5-ha field at the research farm of the USDA-ARS Crop Production Systems Research Unit in Stoneville, MS. To clearly identify naturally growing GR weeds in the field with a spatial resolution at the level of millimeters, the flight was conducted at an altitude of 10m, which is the minimum allowable altitude for autopilot operation. With that altitude, the hyperspectral imager has a ground resolution at about 0.5 mm. Considering the battery time for a single flight, the 16 rows on the east side of the field (confined by the red rectangle box in Figure 3) were set as the target of imaging. After imaging, the field was sprayed with glyphosate. The field was imaged again three days after being sprayed to identify any GR weeds. From the images, three weeds were identified: Palmer amaranth, barnyardgrass [Echinochloa crus-galli (L.) Beauv.], and large crabgrass [Digitaria sanguinalis (L.) Scop.]. GR Palmer amaranth is a troublesome weed in soybean fields. It can emerge throughout the growing season, grow rapidly, produce abundant seed, and reduce yield (Jha and Norsworthy Reference Jha and Norsworthy2009; Steckel Reference Steckel2007; Ward et al. Reference Ward, Webster and Steckel2013). Barnyardgrass may or may not have resistance to glyphosate, which is under investigation in the Mississippi Delta; while crabgrass has not yet been found to have any resistance to glyphosate (V Nandula, personal communication). Figure 3 shows the GR and GS Palmer amaranth identified from postspraying, narrow-band, multispectral imaging to match up the discrimination from the prespraying hyperspectral imaging.
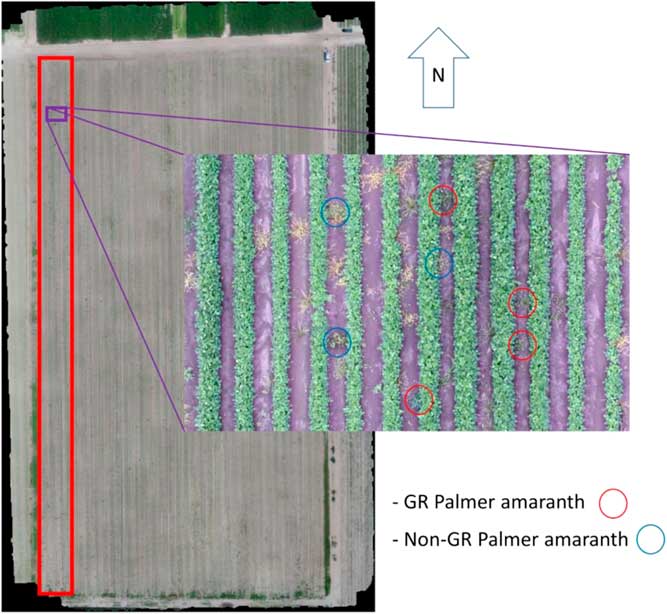
Figure 3 The entire soybean field with the 16 rows confined by the red rectangular box and GR and GS Palmer amaranth identified from postspraying, UAV narrow-band, multispectral imaging.
Considerations for UAV Usage
UAVs will find a niche in PWM. In the early 2010s, the media has put a positive spin on UAVs and their potential for agricultural applications (Freeman and Freeland Reference Freeman and Freeland2015). However, researchers need to be careful not to oversell UAV’s capabilities. Below are several considerations for the analyst to be aware of before using UAVs as a decision support tool.
A major component of the UAV system is the pilot and trained spotter who monitors the path of the UAV. There are costs for pilot and spotter training and for processing the imagery. For those who will attempt to process the imagery themselves, commercial image-processing software prices range from $3,000 to $15,000, and it is important to know the appropriate techniques to use for deriving maps. Researchers primarily use a combination of spatial and spectral features as input into algorithms for crop–weed discrimination (Hung et al. Reference Hung, Xu and Sukkarieh2014; Peña et al. Reference Peña, Torres-Sánchez, de Castro, Kelly and López-Granados2013; Yano et al. Reference Yano, Alves, Santiago and Mederos2016). The other option is to send the imagery to a commercial processor. These companies charge based on the number of images processed. Finally, to obtain optimal results from the imagery, the user or his or her consultant must know how to interpret the imagery (Harris Reference Green2014; Ruzgiene and Aksa-Mitauskas Reference Ruzgiene and Aksa-Mitauskas2013).
Users need to be aware of the rules and regulations required by law to operate UAVs. Freeman and Freeland (Reference Freeman and Freeland2015) provided a general overview of laws governing UAVs for commercial applications in the United States that were applicable until June 2016, when the Federal Aviation Administration (FAA) released new rules for nonhobbyist, small, unmanned aircraft (UAS) operations as Part 101 of the Federal Aviation Regulations (FAA 2016). Under the new rules, an operator must have a remote pilot airman certificate with a small UAS rating or be under the direct supervision of a person who holds such a certificate. The UAV must be less than 25 kg and operate within the visual line of sight of the operator. It cannot fly higher than 122 m above the ground. The maximum speed is 160 km h−1.
Also, more and more portable hyperspectral imaging sensors have been developed for use on UAVs; they are small in size (8 cm by 5 cm by 5 cm) and lightweight (100 to 500 g). Compared with multispectral sensors, hyperspectral sensors can be used to detect subtle changes of spectral data to indicate plant biophysical and biochemical properties. However, use of a hyperspectral sensor typically involves more stringent requirements than use of a multispectral sensor. Push-broom hyperspectral sensors require suitable flight speeds, especially at low altitudes (10 to 15 m), to be able to produce good-quality images without distortion. We had the experience of flying a hyperspectral imager a number of times with no success, until we achieved a suitable flight speed to combat the wind speed (>8 km sec−1). Flying a multispectral sensor (or frame-based hyperspectral imager) is relatively easy. The sensors can be flexibly set up to have good-quality images. The costs of hyperspectral and multispectral imagers are quite different. A portable hyperspectral imager can be $45,000 to $55,000, while a multispectral imager can be $3,000 to $6,000. This is another factor that has to be considered when choosing imaging sensors. Actually, if we only want to monitor the growth of a crop, we may only need a multispectral sensor, while if we want to detect certain stress to identify the spectral signature of the stress, we may need a hyperspectral sensor. Even we use a hyperspectral sensor; as long as we identify the sensitive bands and develop the detection algorithm with the band information, we can customize a multispectral sensor with our band information to simplify the detection system in use to avoid processing a huge amount of hyperspectral cubic data every time.
Conclusions
In PWM, UAVs have great potential for managing crops and pastures, detecting invasions and infestations, assessing crop herbicide damage, and monitoring herbicide-resistant weeds. UAVs are easy to maneuver, cost-effective, and can fly low with rapid imaging capabilities. UAV remote sensing systems have significant advantages over satellite, manned airborne, and ground-based remote sensing systems in detection of weeds from crops; hence, are developed for other applications related to PWM in the scale of crop fields. In this paper, we demonstrated applications of RGB and CIR centimeter-resolution images acquired on small UAVs to assess crop injury from sprayed dicamba in a soybean field, and we also discussed the potential applications of UAV-based remote sensing systems to rapidly differentiate naturally grown GR and GS weed distributions in crop fields, which provides useful information for others conducting similar research.
This paper focused on UAV remote sensing for PWM. The next task in developing the UAV technology for PWM should be the integration of the remote sensing systems with the variable-rate spray (VRS) systems. The UAV remote sensing systems can be used in crop fields to detect crop injury and identify weed-infested areas, weed species, and even herbicide-resistant weeds. Then, the VRS systems can be used to spray herbicides in response to what the UAV remote sensing systems detected to treat the field site specifically. The integrated system can take one of the two forms:
-
1. Remote sensing and VRS systems on the same UAV for real-time operation. The key technology for this integration is rapid remote sensing image processing to generate a prescription map for the VRS system to take action promptly. For rapid image processing, cloud computing may be needed to interact between the cloud server and the UAV onboard computer. Currently, regular UAVs may carry a payload (spray solution) up to 10 to 20 kg to treat small areas. So, a relatively big UAV is needed to carry the remote sensing and VRS systems at the same time.
-
2. Remote sensing and VRS systems on two different UAVs for near-time operation. The advantage of this integration is that it can give a few minutes and even a few hours for image processing, yet timely VRS action can be taken. Remote sensing can be conducted using a small UAV, and VRS can be performed accordingly with a special VRS UAV plane while the data transmission between the systems goes through wireless/cloud communications. Actually, remote sensing prescription data generated this way can be used for VRS systems on regular manned spray airplanes and ground tractor-mounted systems as well.
After a field is treated with herbicide, UAV remote sensing systems can be used to fly over the field a second time to acquire images for tracking the daily or weekly responses of weeds to the herbicide spray and for evaluation of the effect of VRS.
Remote sensing technology has been developed to the point that it can provide accurate information for tactical operation of PA, and hence PWM. UAV certainly provides a unique, but not a stand-alone, platform for low-altitude remote sensing. Coordination of multiplatform remote sensing data from high-resolution satellites, manned aircraft, and ground on-the-go systems with UAVs is still necessary, and the fusion of multisensor remote sensing data from digital color, multispectral, hyperspectral, and thermal imagers definitely is a way to improve the quality of the data used for decision support in weed management. With the development of remote sensors to extract plant structure and spectral information, weeds will be more precisely identified from crops between rows and in rows in crop fields, crop injury from off-target herbicide drift will be better assessed for improved configuration of spraying operations, and the distribution of GR and GS weeds will be more accurately mapped in crop fields for appropriate use of different herbicides.




