



1. Introduction
This paper aims to revisit the ray path concept for fast waves propagating over heterogeneous turbulent flows. Considering ocean surface wave propagation, many authors have already discussed the random changes of rays subject to a random current (Voronovich Reference Voronovich1991; White & Fornberg Reference White and Fornberg1998; Smit & Janssen Reference Smit and Janssen2019), and consequences on wave action distributions. Closures have been derived in the Eulerian setting (Bal & Chou Reference Bal and Chou2002; Klyatskin & Koshel Reference Klyatskin and Koshel2015; Borcea, Garnier & Solna Reference Borcea, Garnier and Solna2019; Kafiabad, Savva & Vanneste Reference Kafiabad, Savva and Vanneste2019; Bôas & Young Reference Bôas and Young2020; Garnier, Gay & Savin Reference Garnier, Gay and Savin2020). Some of these approaches can be traced back to wave–wave interaction models (e.g. McComas & Bretherton (Reference McComas and Bretherton1977); see also Kafiabad et al. (Reference Kafiabad, Savva and Vanneste2019), and references therein). In most cases, the central assumption is either time-delta-correlated turbulent velocity (Voronovich Reference Voronovich1991; Klyatskin Reference Klyatskin2005; Klyatskin & Koshel Reference Klyatskin and Koshel2015) and/or fast waves in comparison to fluid flow velocities (White & Fornberg Reference White and Fornberg1998; Dysthe Reference Dysthe2001; Bal & Chou Reference Bal and Chou2002; Borcea et al. Reference Borcea, Garnier and Solna2019; Kafiabad et al. Reference Kafiabad, Savva and Vanneste2019; Smit & Janssen Reference Smit and Janssen2019; Bôas & Young Reference Bôas and Young2020; Garnier et al. Reference Garnier, Gay and Savin2020; Boury, Bühler & Shatah Reference Boury, Bühler and Shatah2023; Wang et al. Reference Wang, Bôas, Young and Vanneste2023). Medium variations may be slow, and delta-correlations are hardly justifiable in a fixed frame. However, attached to a fast-propagating wave group, the medium may seem to vary rapidly, and the delta-correlation assumption makes more sense. Another common assumption is frozen turbulence. In such a case, weak currents also imply conservation along rays of intrinsic frequency, wavenumber and group velocity magnitude in two dimensions (Boury et al. Reference Boury, Bühler and Shatah2023). Subsequently, most wave dynamics models neglect variations and diffusion of frequency or wavenumber.
The diffusion of the wave action at large distance with a multiscale decomposition of the current has already been reported (Bal & Chou Reference Bal and Chou2002). However, an explicit formulation for the diffusivity has been derived solely for a zero large-scale current. More generally, fast wave models rely mostly on either zero or constant current components at larger scales. West (Reference West1978), for instance, discussed acoustic waves in two-component random media, but no velocity was involved.
Hereafter, the proposed two-scale velocity decomposition falls into the family of stochastic transport models (Kunita Reference Kunita1997; Mikulevicius & Rozovskii Reference Mikulevicius and Rozovskii2004; Resseguier et al. Reference Resseguier, Li, Jouan, Dérian, Mémin and Bertrand2020a; Zhen, Resseguier & Chapron Reference Zhen, Resseguier and Chapron2023), including dynamics under location uncertainty (LU) (Mémin Reference Mémin2014; Resseguier, Mémin & Chapron Reference Resseguier, Mémin and Chapron2017a) and stochastic advection by Lie transport (SALT) (Holm Reference Holm2015). Under this framework, the small-scale velocity component is delta-correlated in time (Cotter, Gottwald & Holm Reference Cotter, Gottwald and Holm2017). Up to usual source terms, fluid dynamics quantities (temperature, momentum, etc.) are transported by both the large-scale revolved component and that random unresolved turbulence component. The stochastic closures obtained are conservative. Nonlinear wave Hamiltonian dynamics and wave influence on currents (e.g. Stokes drift) have then been derived (e.g. Crisan & Holm Reference Crisan and Holm2018; Bauer et al. Reference Bauer, Chandramouli, Chapron, Li and Mémin2020; Holm Reference Holm2021; Holm & Luesink Reference Holm and Luesink2021; Dinvay & Mémin Reference Dinvay and Mémin2022; Holm, Hu & Street Reference Holm, Hu and Street2023). Considering a single-wavevector current, solutions for a monochromatic shallow-water wave were developed by Mémin et al. (Reference Mémin, Li, Lahaye, Tissot and Chapron2022). In the present study, our objective is restricted to the influence of turbulent flows on linear waves.
After first recalling the principles of the ray tracing method, we present the multiscale framework for fast wave dynamics, its physical grounds, and a calibration method for the closure. Simplified stochastic equations are then derived for the ray dynamics and the wave action spectrum, in both Lagrangian and Eulerian settings. For illustrative examples, numerical tools, analytic models and proxies are applied to ocean surface gravity waves propagating through two types of two-dimensional (2-D) turbulent flows: a typical slow homogeneous turbulence, and a jet case.
2. Characteristics of wave packet rays
Isolating a single progressive group of quasi-regular wave trains, it follows a form  $h(\boldsymbol {x},t) \exp ({\mathrm {i} \phi (\boldsymbol {x},t)})+{\rm c.c.}$, for most properties. Typically,
$h(\boldsymbol {x},t) \exp ({\mathrm {i} \phi (\boldsymbol {x},t)})+{\rm c.c.}$, for most properties. Typically,  $h$ would be the local wave height, in metres. If a packet is to be followed, then the phase
$h$ would be the local wave height, in metres. If a packet is to be followed, then the phase  $\phi (\boldsymbol {x},t)$ must vary smoothly along the propagation, i.e.
$\phi (\boldsymbol {x},t)$ must vary smoothly along the propagation, i.e.  $\phi (\boldsymbol {x},t)$ is differentiable. The relative frequency is then
$\phi (\boldsymbol {x},t)$ is differentiable. The relative frequency is then  ${\omega = -\partial _t \phi (\boldsymbol {x},t)}$, and the wavenumber vector is
${\omega = -\partial _t \phi (\boldsymbol {x},t)}$, and the wavenumber vector is  $\boldsymbol {k} = \boldsymbol {\nabla } \phi (\boldsymbol {x},t)$, with wavenumber
$\boldsymbol {k} = \boldsymbol {\nabla } \phi (\boldsymbol {x},t)$, with wavenumber  $k=\| \boldsymbol {k}\|$, and direction given by the normalized wavevector,
$k=\| \boldsymbol {k}\|$, and direction given by the normalized wavevector,  $\tilde {\boldsymbol {k}} = \boldsymbol {k} / k = \left (\begin{smallmatrix} \cos \theta _k \\ \sin \theta _k \end{smallmatrix}\right )$. To first order, such a train of waves is dispersive, and the intrinsic frequency reads
$\tilde {\boldsymbol {k}} = \boldsymbol {k} / k = \left (\begin{smallmatrix} \cos \theta _k \\ \sin \theta _k \end{smallmatrix}\right )$. To first order, such a train of waves is dispersive, and the intrinsic frequency reads
 \begin{equation} \omega - \boldsymbol{k}
\boldsymbol{\cdot} \boldsymbol{v}=\omega_0 = \begin{cases}
\mathrm{constant}\times\dfrac{1}{\alpha}\,k^\alpha
, & \alpha \neq0, \\
\mathrm{constant}\times\log(k), & \alpha =
0,
\end{cases}\end{equation}
\begin{equation} \omega - \boldsymbol{k}
\boldsymbol{\cdot} \boldsymbol{v}=\omega_0 = \begin{cases}
\mathrm{constant}\times\dfrac{1}{\alpha}\,k^\alpha
, & \alpha \neq0, \\
\mathrm{constant}\times\log(k), & \alpha =
0,
\end{cases}\end{equation}
and propagates with its group velocity  $\boldsymbol v_g = \boldsymbol {\boldsymbol {\nabla }}_{\boldsymbol {k}} \omega$, constantly modified by the local velocity of the currents
$\boldsymbol v_g = \boldsymbol {\boldsymbol {\nabla }}_{\boldsymbol {k}} \omega$, constantly modified by the local velocity of the currents  $\boldsymbol v$,
$\boldsymbol v$,
 \begin{equation} \frac{{\mathrm{d}} \boldsymbol{x}_r}{{\mathrm{d}} t} =\boldsymbol v_g=\boldsymbol v_g^0+ \boldsymbol v, \end{equation}
\begin{equation} \frac{{\mathrm{d}} \boldsymbol{x}_r}{{\mathrm{d}} t} =\boldsymbol v_g=\boldsymbol v_g^0+ \boldsymbol v, \end{equation}
where  $\boldsymbol {x}_r$ is the centroid of a wave group,
$\boldsymbol {x}_r$ is the centroid of a wave group,  $\boldsymbol v_g^0 = ({\partial \omega _0 (k) }/{\partial k})\,\tilde {\boldsymbol {k}}$ is the group velocity without currents, i.e. depending solely on the wavevector. For
$\boldsymbol v_g^0 = ({\partial \omega _0 (k) }/{\partial k})\,\tilde {\boldsymbol {k}}$ is the group velocity without currents, i.e. depending solely on the wavevector. For  $\alpha =1$, the medium is non-dispersive (e.g. acoustic waves). Parameter
$\alpha =1$, the medium is non-dispersive (e.g. acoustic waves). Parameter  $\alpha =1/2$ corresponds to gravity waves over deep ocean (
$\alpha =1/2$ corresponds to gravity waves over deep ocean ( $\omega _0=\sqrt {gk}$). The dominant wavevector
$\omega _0=\sqrt {gk}$). The dominant wavevector  $\boldsymbol {k}$ within the group evolves according to
$\boldsymbol {k}$ within the group evolves according to
 \begin{equation} \frac{{\mathrm{d}} \boldsymbol{k}}{{\mathrm{d}} t}={-}\boldsymbol{\boldsymbol{\nabla}} {\boldsymbol v}^{{\rm T}}\boldsymbol{k}. \end{equation}
\begin{equation} \frac{{\mathrm{d}} \boldsymbol{k}}{{\mathrm{d}} t}={-}\boldsymbol{\boldsymbol{\nabla}} {\boldsymbol v}^{{\rm T}}\boldsymbol{k}. \end{equation}
Equations (2.2)–(2.3) are the Hamilton eikonal equations. Along the propagating ray, velocity gradients induce linear variations. Decelerating currents will, for instance, shorten waves, and reduce the group velocity. Travelling over fields of random velocities  $\boldsymbol v$, the wavevector
$\boldsymbol v$, the wavevector  $\boldsymbol {k}$ will also become randomly distributed. Scattering of ocean surface wave packets by random currents can generally be assumed to be weak, with
$\boldsymbol {k}$ will also become randomly distributed. Scattering of ocean surface wave packets by random currents can generally be assumed to be weak, with  $\| \boldsymbol v \|$ of order
$\| \boldsymbol v \|$ of order  $0.5$ m s
$0.5$ m s $^{-1}$, much smaller than
$^{-1}$, much smaller than  $v_g^0 = \| \boldsymbol {v}_g^0 \|$ of order
$v_g^0 = \| \boldsymbol {v}_g^0 \|$ of order  $10$ m s
$10$ m s $^{-1}$. Yet cumulative effects of these random surface currents can lead to strong convergence or divergence between initially nearby ray trajectories.
$^{-1}$. Yet cumulative effects of these random surface currents can lead to strong convergence or divergence between initially nearby ray trajectories.
To complete the wave field description,  $E(\boldsymbol {x},t)= \frac 12 \rho g h^2(\boldsymbol {x},t)$ and
$E(\boldsymbol {x},t)= \frac 12 \rho g h^2(\boldsymbol {x},t)$ and  $A(\boldsymbol {x},t)= E(\boldsymbol {x},t)/ \omega _0(k(\boldsymbol {x},t))$ denote energy and action by unit of surface. Here,
$A(\boldsymbol {x},t)= E(\boldsymbol {x},t)/ \omega _0(k(\boldsymbol {x},t))$ denote energy and action by unit of surface. Here,  $E$ is expressed in J m
$E$ is expressed in J m $^{-2}$, and
$^{-2}$, and  $A$ in J s m
$A$ in J s m $^{-2}$. To avoid spurious notations, we set the multiplicative constant
$^{-2}$. To avoid spurious notations, we set the multiplicative constant  $\frac 12 \rho g$ to unity. The wave action is considered to be an adiabatic invariant in the absence of source terms. Wave action is then crucial to anticipate wave transformations by currents (White Reference White1999). Unlike wave energy, wave action is conserved, in the absence of wave generation or dissipation. This action is the integral over wavevectors of the action spectrum
$\frac 12 \rho g$ to unity. The wave action is considered to be an adiabatic invariant in the absence of source terms. Wave action is then crucial to anticipate wave transformations by currents (White Reference White1999). Unlike wave energy, wave action is conserved, in the absence of wave generation or dissipation. This action is the integral over wavevectors of the action spectrum  $N$, also related to the wave energy spectrum
$N$, also related to the wave energy spectrum  $E$:
$E$:
 \begin{equation} A(\boldsymbol{x},t)=\int {\mathrm{d}} \boldsymbol{k} \, N(\boldsymbol{x},\boldsymbol{k},t)= \int {\mathrm{d}} \boldsymbol{k}\,\frac{E(\boldsymbol{x},\boldsymbol{k},t)}{\omega_0(\boldsymbol{k},t)}.\end{equation}
\begin{equation} A(\boldsymbol{x},t)=\int {\mathrm{d}} \boldsymbol{k} \, N(\boldsymbol{x},\boldsymbol{k},t)= \int {\mathrm{d}} \boldsymbol{k}\,\frac{E(\boldsymbol{x},\boldsymbol{k},t)}{\omega_0(\boldsymbol{k},t)}.\end{equation}
Action and energy spectrum quantify action and energy by unit of surface (unit of  $\boldsymbol {x}$) and by unit of wavevector surface (unit of
$\boldsymbol {x}$) and by unit of wavevector surface (unit of  $\boldsymbol {k}$). Consider the
$\boldsymbol {k}$). Consider the  $(\boldsymbol {x},\boldsymbol {k})$ variable change between different times
$(\boldsymbol {x},\boldsymbol {k})$ variable change between different times  $t_i$ and
$t_i$ and  $t_f$ integrating the characteristic eikonal equations (2.2)–(2.3):
$t_f$ integrating the characteristic eikonal equations (2.2)–(2.3):
 \begin{equation} \begin{pmatrix} \boldsymbol{x}_r(t_i) \\ \boldsymbol{k}(t_i) \end{pmatrix}\mapsto \begin{pmatrix} \boldsymbol{x}_r(t_f) \\ \boldsymbol{k}(t_f) \end{pmatrix}. \end{equation}
\begin{equation} \begin{pmatrix} \boldsymbol{x}_r(t_i) \\ \boldsymbol{k}(t_i) \end{pmatrix}\mapsto \begin{pmatrix} \boldsymbol{x}_r(t_f) \\ \boldsymbol{k}(t_f) \end{pmatrix}. \end{equation}
According to the Liouville theorem for Hamiltonian mechanics (Landau & Lifshitz Reference Landau and Lifshitz1960, § 46), the state space of the ‘packet-by-packet’ approach (the  $(\boldsymbol {x},\boldsymbol {k})$ space) does not contract or dilate along time. Readers not familiar with Hamiltonian dynamics may see the divergence free of the four-dimensional flow (2.5) – i.e.
$(\boldsymbol {x},\boldsymbol {k})$ space) does not contract or dilate along time. Readers not familiar with Hamiltonian dynamics may see the divergence free of the four-dimensional flow (2.5) – i.e.  $\boldsymbol {\nabla }_{\boldsymbol {x}} \boldsymbol {\cdot } {{\mathrm {d}} \boldsymbol {x}_r}/{{\mathrm {d}} t} + \boldsymbol {\nabla }_{\boldsymbol {k}} \boldsymbol {\cdot } {{\mathrm {d}} \boldsymbol {k}}/{{\mathrm {d}} t} =0$ – as the divergence free of incompressible flow velocities, leading naturally to volume-preserving dynamics. Therefore, if wave dissipation is neglected, then the wave action spectrum
$\boldsymbol {\nabla }_{\boldsymbol {x}} \boldsymbol {\cdot } {{\mathrm {d}} \boldsymbol {x}_r}/{{\mathrm {d}} t} + \boldsymbol {\nabla }_{\boldsymbol {k}} \boldsymbol {\cdot } {{\mathrm {d}} \boldsymbol {k}}/{{\mathrm {d}} t} =0$ – as the divergence free of incompressible flow velocities, leading naturally to volume-preserving dynamics. Therefore, if wave dissipation is neglected, then the wave action spectrum  $N$ is conserved (Lavrenov Reference Lavrenov2013), i.e.
$N$ is conserved (Lavrenov Reference Lavrenov2013), i.e.
 \begin{equation} N (\boldsymbol{x}_r(t_i),\boldsymbol{k}(t_i),t_i)=N (\boldsymbol{x}_r(t_f),\boldsymbol{k}(t_f),t_f). \end{equation}
\begin{equation} N (\boldsymbol{x}_r(t_i),\boldsymbol{k}(t_i),t_i)=N (\boldsymbol{x}_r(t_f),\boldsymbol{k}(t_f),t_f). \end{equation}This result is extremely useful because it involves only quantities of the characteristics, i.e. each Fourier mode can be modified independently of the others. The wave energy spectrum can be computed from the characteristics
 \begin{equation} E (\boldsymbol{x}_r(t_f),\boldsymbol{k}(t_f),t_f)=\frac{\omega_0 (\boldsymbol{k}(t_f))}{\omega_0 (\boldsymbol{k}(t_i))}\, E (\boldsymbol{x}_r(t_i),\boldsymbol{k}(t_i),t_i). \end{equation}
\begin{equation} E (\boldsymbol{x}_r(t_f),\boldsymbol{k}(t_f),t_f)=\frac{\omega_0 (\boldsymbol{k}(t_f))}{\omega_0 (\boldsymbol{k}(t_i))}\, E (\boldsymbol{x}_r(t_i),\boldsymbol{k}(t_i),t_i). \end{equation}
starting with an initial incoming wave spectrum  $E (\boldsymbol {x}_r(t_i),\boldsymbol {k}(t_i),t_i)$ for every wavevector
$E (\boldsymbol {x}_r(t_i),\boldsymbol {k}(t_i),t_i)$ for every wavevector  $\boldsymbol {k}(t_i)$, starting from a small set of spatial points
$\boldsymbol {k}(t_i)$, starting from a small set of spatial points  $\boldsymbol {x}_r(t_i)$.
$\boldsymbol {x}_r(t_i)$.
3. A new fast wave assumption
Eikonal equations (2.2)–(2.3) are driven by currents and their gradients. Commonly, the Eulerian current  $\boldsymbol {v}$ is decomposed into a low-frequency large-scale component
$\boldsymbol {v}$ is decomposed into a low-frequency large-scale component  $\bar {\boldsymbol {v}}$ and a transient small-scale unresolved component
$\bar {\boldsymbol {v}}$ and a transient small-scale unresolved component  $\boldsymbol {v}'$:
$\boldsymbol {v}'$:
 \begin{equation} {\boldsymbol{v}} = \bar{\boldsymbol{v}} + \boldsymbol{v}'. \end{equation}
\begin{equation} {\boldsymbol{v}} = \bar{\boldsymbol{v}} + \boldsymbol{v}'. \end{equation}Current gradients naturally follow the same scale separation. From now on, we will consider divergence-free 2-D currents only.
3.1. The ray Lagrangian correlation time
To better characterize the wave dynamics in such a random environment, the covariance of the fluid velocity can be evaluated in the wave group frame. To take into account the small-scale unresolved component  $\boldsymbol {v}'$, its Eulerian spatio-temporal covariance is considered, assuming statistical homogeneity and stationarity for the Eulerian velocity
$\boldsymbol {v}'$, its Eulerian spatio-temporal covariance is considered, assuming statistical homogeneity and stationarity for the Eulerian velocity  $\boldsymbol {v}'_E(t,\boldsymbol {x})=\boldsymbol {v}'(t,\boldsymbol {x})$:
$\boldsymbol {v}'_E(t,\boldsymbol {x})=\boldsymbol {v}'(t,\boldsymbol {x})$:
 \begin{align} C_{ij}^{v'_{E}}(\delta t,\delta \boldsymbol{x}) =\mathbb{E} (v'_i (t,\boldsymbol{x})\,v'_j (t+\delta t,\boldsymbol{x}+\delta\boldsymbol{x})) =\mathbb{E} (v'_i (t,\boldsymbol{x}_r(t))\,v'_j (t+\delta t,\boldsymbol{x}_r(t)+\delta\boldsymbol{x})), \end{align}
\begin{align} C_{ij}^{v'_{E}}(\delta t,\delta \boldsymbol{x}) =\mathbb{E} (v'_i (t,\boldsymbol{x})\,v'_j (t+\delta t,\boldsymbol{x}+\delta\boldsymbol{x})) =\mathbb{E} (v'_i (t,\boldsymbol{x}_r(t))\,v'_j (t+\delta t,\boldsymbol{x}_r(t)+\delta\boldsymbol{x})), \end{align}
where  $\boldsymbol {x}_r$ is a solution of (2.2) with an arbitrary initial position
$\boldsymbol {x}_r$ is a solution of (2.2) with an arbitrary initial position  $\boldsymbol {x}_r^0$. Then we define
$\boldsymbol {x}_r^0$. Then we define  ${v'_R(t) =v' (t,\boldsymbol {x}_r(t))}$, the Lagrangian velocity along the ray
${v'_R(t) =v' (t,\boldsymbol {x}_r(t))}$, the Lagrangian velocity along the ray  $\boldsymbol {x}_r(t)$. The temporal covariance of the small-scale component
$\boldsymbol {x}_r(t)$. The temporal covariance of the small-scale component  $\boldsymbol {v}'$ – in the wave group frame – is the covariance of that Lagrangian velocity:
$\boldsymbol {v}'$ – in the wave group frame – is the covariance of that Lagrangian velocity:
 \begin{equation} C_{ij}^{v'_R} (\delta t)= \mathbb{E} (v'_i (t,\boldsymbol{x}_r(t))\,v'_j (t+\delta t,\boldsymbol{x}_r(t+\delta t))) =C_{ij}^{v'_E} (\delta t, \boldsymbol{x}_r(t+\delta t)-\boldsymbol{x}_r(t)). \end{equation}
\begin{equation} C_{ij}^{v'_R} (\delta t)= \mathbb{E} (v'_i (t,\boldsymbol{x}_r(t))\,v'_j (t+\delta t,\boldsymbol{x}_r(t+\delta t))) =C_{ij}^{v'_E} (\delta t, \boldsymbol{x}_r(t+\delta t)-\boldsymbol{x}_r(t)). \end{equation}Assuming, for example, a typical isotropic form for the Eulerian covariance,
 \begin{equation} C^{v'_E} ( \delta t, \delta \boldsymbol{x} ) = C \left(\frac{|\delta t|}{\tau_{v'}} + \frac{\| \delta \boldsymbol{x} \|}{l_{v'}}\right), \end{equation}
\begin{equation} C^{v'_E} ( \delta t, \delta \boldsymbol{x} ) = C \left(\frac{|\delta t|}{\tau_{v'}} + \frac{\| \delta \boldsymbol{x} \|}{l_{v'}}\right), \end{equation}
the covariance can be evaluated in the wave group frame for small time increment  $\delta t$:
$\delta t$:
 \begin{align} C^{v'_R} ( \delta t )= C \left(\frac{|\delta t|}{\tau_{v'}} + \frac{\| \boldsymbol{x}_r(t'+t)-\boldsymbol{x}_r(t') \|}{l_{v'}}\right) =C \left(\left( \frac{1}{\tau_{v'}} + \frac{\| \boldsymbol{v}_g \|}{l_{v'}}\right) |\delta t| + O(\delta t^2) \right), \end{align}
\begin{align} C^{v'_R} ( \delta t )= C \left(\frac{|\delta t|}{\tau_{v'}} + \frac{\| \boldsymbol{x}_r(t'+t)-\boldsymbol{x}_r(t') \|}{l_{v'}}\right) =C \left(\left( \frac{1}{\tau_{v'}} + \frac{\| \boldsymbol{v}_g \|}{l_{v'}}\right) |\delta t| + O(\delta t^2) \right), \end{align}
since  $\boldsymbol {x}_r(t'+t)-\boldsymbol {x}_r(t') = \boldsymbol {v}_g\,\delta t + O(\delta t^2)$. Therefore,
$\boldsymbol {x}_r(t'+t)-\boldsymbol {x}_r(t') = \boldsymbol {v}_g\,\delta t + O(\delta t^2)$. Therefore,  $({1}/{\tau _{v'}} + {\| \boldsymbol {v}_g \|}/{l_{v'}})^{-1}$ is the correlation time of
$({1}/{\tau _{v'}} + {\| \boldsymbol {v}_g \|}/{l_{v'}})^{-1}$ is the correlation time of  $\boldsymbol {v}' (t,\boldsymbol {x}_r(t))$. For fast waves, the along-ray correlation time of the small-scale velocity can be approximated by
$\boldsymbol {v}' (t,\boldsymbol {x}_r(t))$. For fast waves, the along-ray correlation time of the small-scale velocity can be approximated by  ${l_{v'}}/{v_g^0 }$. Note that eikonal equations (2.2)–(2.3) involve both velocity and velocity gradients. The above derivation is also valid for the small-scale velocity gradients
${l_{v'}}/{v_g^0 }$. Note that eikonal equations (2.2)–(2.3) involve both velocity and velocity gradients. The above derivation is also valid for the small-scale velocity gradients  $(\boldsymbol {\nabla } {\boldsymbol {v}}^{{\rm T}})'(t,\boldsymbol {x}_r(t))$. The ratio
$(\boldsymbol {\nabla } {\boldsymbol {v}}^{{\rm T}})'(t,\boldsymbol {x}_r(t))$. The ratio  $\epsilon$ between that along-ray correlation time and the characteristic time of the wave group properties evolution will then control the time decorrelation assumption of
$\epsilon$ between that along-ray correlation time and the characteristic time of the wave group properties evolution will then control the time decorrelation assumption of  $\boldsymbol {v}'$:
$\boldsymbol {v}'$:
 \begin{equation} \epsilon =\frac{l_{v'}}{v_g^0 }\,\|\boldsymbol{\nabla} {\boldsymbol{v}}^{{\rm T}}\| \sim\frac{l_{v'}}{l_{v}}\,\frac{\|\boldsymbol{v}\|}{v_g^0}.\end{equation}
\begin{equation} \epsilon =\frac{l_{v'}}{v_g^0 }\,\|\boldsymbol{\nabla} {\boldsymbol{v}}^{{\rm T}}\| \sim\frac{l_{v'}}{l_{v}}\,\frac{\|\boldsymbol{v}\|}{v_g^0}.\end{equation}
This time scale estimation can be obtained from spatio-temporal covariances more general than (3.4) (not shown) even though the derivation is more technical. Note that the Eulerian small-scale velocity  $\boldsymbol {v}'$ is not necessarily time-uncorrelated, as assumed in Voronovich (Reference Voronovich1991) and Klyatskin & Koshel (Reference Klyatskin and Koshel2015). Yet for small enough
$\boldsymbol {v}'$ is not necessarily time-uncorrelated, as assumed in Voronovich (Reference Voronovich1991) and Klyatskin & Koshel (Reference Klyatskin and Koshel2015). Yet for small enough  $\epsilon$, the Lagrangian small-scale velocity along the ray can be considered time-uncorrelated. From the expression for
$\epsilon$, the Lagrangian small-scale velocity along the ray can be considered time-uncorrelated. From the expression for  $\epsilon$, such a condition depends upon:
$\epsilon$, such a condition depends upon:
(i)
 $v_g^0$, the fast wave group velocity;
$v_g^0$, the fast wave group velocity;(ii)
$\|\boldsymbol {v}\|$, often slow but not always negligible compared to the intrinsic wave group $v_g^0$;(iii)
${l_{v'}}/{l_{v}}$, related to the separation between large scales $\bar {\boldsymbol {v}}$ and small scales $\boldsymbol {v}'$, e.g. the spatial filtering cutoff of the large-scale velocity $\bar {\boldsymbol {v}}$, but also related to its kinetic energy distribution over spatial scales, typically the spectrum slope.







This along-ray partial time-decorrelation assumption is less restrictive than the usual fast wave approximation (White & Fornberg Reference White and Fornberg1998; Dysthe Reference Dysthe2001; Bal & Chou Reference Bal and Chou2002; Borcea et al. Reference Borcea, Garnier and Solna2019; Kafiabad et al. Reference Kafiabad, Savva and Vanneste2019; Smit & Janssen Reference Smit and Janssen2019; Bôas & Young Reference Bôas and Young2020; Garnier et al. Reference Garnier, Gay and Savin2020; Boury et al. Reference Boury, Bühler and Shatah2023; Wang et al. Reference Wang, Bôas, Young and Vanneste2023) – say  ${\|\boldsymbol {v}\|}/{v_g^0 } \ll 1$ – and than the SALT-LU time-decorrelation used for turbulence dynamics (Mémin Reference Mémin2014; Holm Reference Holm2015; Cotter et al. Reference Cotter, Gottwald and Holm2017; Resseguier et al. Reference Resseguier, Li, Jouan, Dérian, Mémin and Bertrand2020a) – say
${\|\boldsymbol {v}\|}/{v_g^0 } \ll 1$ – and than the SALT-LU time-decorrelation used for turbulence dynamics (Mémin Reference Mémin2014; Holm Reference Holm2015; Cotter et al. Reference Cotter, Gottwald and Holm2017; Resseguier et al. Reference Resseguier, Li, Jouan, Dérian, Mémin and Bertrand2020a) – say  ${l_{v'}}/{l_{v}} \ll 1$. Similarly, this last validity criterion can be obtained by replacing
${l_{v'}}/{l_{v}} \ll 1$. Similarly, this last validity criterion can be obtained by replacing  $\boldsymbol {x}_r$ in (3.2)–(3.6) by the fluid particle Lagrangian path
$\boldsymbol {x}_r$ in (3.2)–(3.6) by the fluid particle Lagrangian path  $\boldsymbol {x}$ (solution of
$\boldsymbol {x}$ (solution of  ${{\mathrm {d}} \boldsymbol {x}}/{{\mathrm {d}} t} =\boldsymbol {v}$) and thus
${{\mathrm {d}} \boldsymbol {x}}/{{\mathrm {d}} t} =\boldsymbol {v}$) and thus  $\boldsymbol {v}_g^0$ by
$\boldsymbol {v}_g^0$ by  $\boldsymbol {v}$. These asymptotic models often rely on averaging or homogenization techniques (Papanicolaou & Kohler Reference Papanicolaou and Kohler1974; White & Fornberg Reference White and Fornberg1998) to derive Markovian dynamics involving various types of diffusivity.
$\boldsymbol {v}$. These asymptotic models often rely on averaging or homogenization techniques (Papanicolaou & Kohler Reference Papanicolaou and Kohler1974; White & Fornberg Reference White and Fornberg1998) to derive Markovian dynamics involving various types of diffusivity.
3.2. Ray absolute diffusivity and turbulence statistics: calibration
Diffusivity is a natural tool to specify statistics of uncorrelated random media. For waves in random media, we will specify multi-point statistics, and the Fourier space is convenient for this purpose. We will first present scalar diffusivity and then distribute it over spatial scales to fully calibrate the random velocity  $\boldsymbol {v}'$, i.e. choose some parameter values to set the statistics of that velocity field. As such, we will obtain a closed model to derive analytic results and generate samples for simulations.
$\boldsymbol {v}'$, i.e. choose some parameter values to set the statistics of that velocity field. As such, we will obtain a closed model to derive analytic results and generate samples for simulations.
The absolute diffusivity (or Kubo-type formula) usually corresponds, in the so-called diffusive regime, to the variance per unit of time of a fluid particle Lagrangian path  ${{\mathrm {d}} \boldsymbol {x}(t)}/{{\mathrm {d}} t} =\boldsymbol {v}_L(t)= \boldsymbol {v} (t,\boldsymbol {x}(t))$. It is approximately equal to the velocity variance times its correlation time. The Eulerian velocity covariance (3.4) will thus induce an absolute diffusivity (Piterbarg & Ostrovskii Reference Piterbarg and Ostrovskii1997; Klyatskin Reference Klyatskin2005)
${{\mathrm {d}} \boldsymbol {x}(t)}/{{\mathrm {d}} t} =\boldsymbol {v}_L(t)= \boldsymbol {v} (t,\boldsymbol {x}(t))$. It is approximately equal to the velocity variance times its correlation time. The Eulerian velocity covariance (3.4) will thus induce an absolute diffusivity (Piterbarg & Ostrovskii Reference Piterbarg and Ostrovskii1997; Klyatskin Reference Klyatskin2005)
 \begin{equation} {\tfrac 12}\,a^L=\int_0^{+\infty} {\mathrm{d}} \delta t\, C^{v'_L} (\delta t)=\int_0^{+\infty} {\mathrm{d}}\delta t\, C^{v'_E} (\delta t, \boldsymbol{x}(t+\delta t)-\boldsymbol{x}(t))\approx \tfrac 12\,\tau_{v'}C(0). \end{equation}
\begin{equation} {\tfrac 12}\,a^L=\int_0^{+\infty} {\mathrm{d}} \delta t\, C^{v'_L} (\delta t)=\int_0^{+\infty} {\mathrm{d}}\delta t\, C^{v'_E} (\delta t, \boldsymbol{x}(t+\delta t)-\boldsymbol{x}(t))\approx \tfrac 12\,\tau_{v'}C(0). \end{equation}
This diffusivity well describes effects of fast-varying eddies, but is not appropriate in our case. Indeed, along a propagating wave group  ${{\mathrm {d}} \boldsymbol {x}_r(t)}/{{\mathrm {d}} t} = \boldsymbol v_g^0(t) + \boldsymbol v_R(t)$, a ray absolute diffusivity occurs and slightly differs from the usual absolute diffusivity to become
${{\mathrm {d}} \boldsymbol {x}_r(t)}/{{\mathrm {d}} t} = \boldsymbol v_g^0(t) + \boldsymbol v_R(t)$, a ray absolute diffusivity occurs and slightly differs from the usual absolute diffusivity to become
 \begin{equation} {\frac 12}\,a^{R}=\int_0^{+\infty} {\mathrm{d}} \delta t\, C^{v'_R} (\delta t)\approx\frac 12\left(\frac{1}{\tau_{v'}} + \frac{\| \boldsymbol{v}_g \|}{l_{v'}}\right)^{{-}1} C(0)\approx\frac 12\, \frac{l_{v'}}{v_g^0}\,C(0). \end{equation}
\begin{equation} {\frac 12}\,a^{R}=\int_0^{+\infty} {\mathrm{d}} \delta t\, C^{v'_R} (\delta t)\approx\frac 12\left(\frac{1}{\tau_{v'}} + \frac{\| \boldsymbol{v}_g \|}{l_{v'}}\right)^{{-}1} C(0)\approx\frac 12\, \frac{l_{v'}}{v_g^0}\,C(0). \end{equation} The absolute diffusivity sets the amplitude of the small-scale velocity  $\boldsymbol {v}'$. Indeed, since the kinetic energy of a time-continuous white noise is infinite, it has no physical meaning. It is more relevant to deal with absolute diffusivity rather than kinetic energy in order to describe the statistics of the time-uncorrelated velocity. To calibrate its spatial correlations, we may focus on its Fourier transform
$\boldsymbol {v}'$. Indeed, since the kinetic energy of a time-continuous white noise is infinite, it has no physical meaning. It is more relevant to deal with absolute diffusivity rather than kinetic energy in order to describe the statistics of the time-uncorrelated velocity. To calibrate its spatial correlations, we may focus on its Fourier transform  $\widehat {\boldsymbol {v}'}(\boldsymbol {\kappa },t)$, denoting by
$\widehat {\boldsymbol {v}'}(\boldsymbol {\kappa },t)$, denoting by  ${\boldsymbol {\kappa } = \kappa \left (\!\begin{smallmatrix} \cos \theta _\kappa \\ \sin \theta _\kappa \end{smallmatrix}\!\right )}$, the surface current wavevector. By analogy with the current kinetic energy spectra
${\boldsymbol {\kappa } = \kappa \left (\!\begin{smallmatrix} \cos \theta _\kappa \\ \sin \theta _\kappa \end{smallmatrix}\!\right )}$, the surface current wavevector. By analogy with the current kinetic energy spectra  $E_\kappa = \frac 12 \oint _0^{2{\rm \pi} } {\mathrm {d}} \theta _\kappa \,\kappa ({\|\hat {\boldsymbol {v} }(\boldsymbol {\kappa },t) \|^2}/{(2{\rm \pi} )^2})$, Resseguier, Mémin & Chapron (Reference Resseguier, Mémin and Chapron2017b) and Resseguier, Pan & Fox-Kemper (Reference Resseguier, Pan and Fox-Kemper2020b) decompose the absolute diffusivity scale by scale:
$E_\kappa = \frac 12 \oint _0^{2{\rm \pi} } {\mathrm {d}} \theta _\kappa \,\kappa ({\|\hat {\boldsymbol {v} }(\boldsymbol {\kappa },t) \|^2}/{(2{\rm \pi} )^2})$, Resseguier, Mémin & Chapron (Reference Resseguier, Mémin and Chapron2017b) and Resseguier, Pan & Fox-Kemper (Reference Resseguier, Pan and Fox-Kemper2020b) decompose the absolute diffusivity scale by scale:
 \begin{equation} a^R=\int_0^{+\infty} A^{R} _{v'} (\kappa) \,{\mathrm{d}} \kappa. \end{equation}
\begin{equation} a^R=\int_0^{+\infty} A^{R} _{v'} (\kappa) \,{\mathrm{d}} \kappa. \end{equation}
Referring it to absolute diffusivity spectral density (ADSD), it is defined as the kinetic energy spectra multiplied by the correlation time at each scale,  $\tau (\kappa )$. Unlike Resseguier et al. (Reference Resseguier, Mémin and Chapron2017b, Reference Resseguier, Pan and Fox-Kemper2020b), that correlation time is here imposed by the wave dynamics. Therefore, by analogy with (3.8), we choose a correlation time
$\tau (\kappa )$. Unlike Resseguier et al. (Reference Resseguier, Mémin and Chapron2017b, Reference Resseguier, Pan and Fox-Kemper2020b), that correlation time is here imposed by the wave dynamics. Therefore, by analogy with (3.8), we choose a correlation time  $\tau ^R(\kappa )={1/ \kappa }/{v_g^0 (k)}$, and then
$\tau ^R(\kappa )={1/ \kappa }/{v_g^0 (k)}$, and then
 \begin{equation} {\frac 12}\,A^{R} (\kappa)=\frac 12\,\tau^R(\kappa)\,E_\kappa (\kappa) =\frac 12\,\frac {1/ \kappa} { v_g^0 (k) }\,E_\kappa (\kappa), \end{equation}
\begin{equation} {\frac 12}\,A^{R} (\kappa)=\frac 12\,\tau^R(\kappa)\,E_\kappa (\kappa) =\frac 12\,\frac {1/ \kappa} { v_g^0 (k) }\,E_\kappa (\kappa), \end{equation}
where  $k$ denotes the wave wavenumber and
$k$ denotes the wave wavenumber and  $\kappa$ the current wavenumber.
$\kappa$ the current wavenumber.
To calibrate an equivalent noise, we model  $\boldsymbol {v}'$ by
$\boldsymbol {v}'$ by  $\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t/{\mathrm {d}} t$, where
$\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t/{\mathrm {d}} t$, where  ${{\mathrm {d}}} B_t/{\mathrm {d}} t$ is a spatio-temporal white noise, and
${{\mathrm {d}}} B_t/{\mathrm {d}} t$ is a spatio-temporal white noise, and  $\boldsymbol {\sigma }$ denotes a spatial filtering operator that encodes spatial correlations through its ADSD,
$\boldsymbol {\sigma }$ denotes a spatial filtering operator that encodes spatial correlations through its ADSD,  $A^{R} _{v'}$ and the horizontal incompressibility condition (
$A^{R} _{v'}$ and the horizontal incompressibility condition ( $\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {\sigma }=0$). For incompressibility, we work with the curl of a streamfunction. To generate a homogeneous and isotropic streamfunction, we can filter a one-dimensional white noise
$\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {\sigma }=0$). For incompressibility, we work with the curl of a streamfunction. To generate a homogeneous and isotropic streamfunction, we can filter a one-dimensional white noise  $\dot {B}$ with a filter
$\dot {B}$ with a filter  $\breve {\psi }_\sigma$ (Resseguier et al. Reference Resseguier, Mémin and Chapron2017b), i.e.
$\breve {\psi }_\sigma$ (Resseguier et al. Reference Resseguier, Mémin and Chapron2017b), i.e.  $\breve {\psi }_\sigma \star \dot {B}$, where
$\breve {\psi }_\sigma \star \dot {B}$, where  $\star$ denotes a spatial convolution. The velocity field is hence
$\star$ denotes a spatial convolution. The velocity field is hence
 \begin{equation} \boldsymbol{v}' = \boldsymbol{\sigma} \,{{\mathrm{d}}} B_t/{\mathrm{d}} t= \boldsymbol{\nabla}^{\bot} \breve{\psi}_{\sigma} \star{{\mathrm{d}}} B_t/{\mathrm{d}} t, \end{equation}
\begin{equation} \boldsymbol{v}' = \boldsymbol{\sigma} \,{{\mathrm{d}}} B_t/{\mathrm{d}} t= \boldsymbol{\nabla}^{\bot} \breve{\psi}_{\sigma} \star{{\mathrm{d}}} B_t/{\mathrm{d}} t, \end{equation}
with  $\boldsymbol {\nabla }^{\bot }$ the 2-D curl. That formula is easily written and implementable in Fourier space (see (A2)). To define the streamfunction filter, we note that
$\boldsymbol {\nabla }^{\bot }$ the 2-D curl. That formula is easily written and implementable in Fourier space (see (A2)). To define the streamfunction filter, we note that  $({{\rm \pi} \kappa ^3}/{(2{\rm \pi} )^2}) | \widehat { \breve {\psi }_{\sigma } }( \kappa ) |^2 = \frac 12 \oint _0^{2{\rm \pi} } {\mathrm {d}} \theta _\kappa \,\kappa ({\| \widehat { \boldsymbol {\sigma } \,{{\mathrm {d}}} B_t }(\boldsymbol {\kappa }) \|^2}/{(2{\rm \pi} )^2\,{\mathrm {d}} t}) = A^{R} _{v'} (\kappa )$, i.e. the filter can be fully defined by the small-scale ADSD
$({{\rm \pi} \kappa ^3}/{(2{\rm \pi} )^2}) | \widehat { \breve {\psi }_{\sigma } }( \kappa ) |^2 = \frac 12 \oint _0^{2{\rm \pi} } {\mathrm {d}} \theta _\kappa \,\kappa ({\| \widehat { \boldsymbol {\sigma } \,{{\mathrm {d}}} B_t }(\boldsymbol {\kappa }) \|^2}/{(2{\rm \pi} )^2\,{\mathrm {d}} t}) = A^{R} _{v'} (\kappa )$, i.e. the filter can be fully defined by the small-scale ADSD  $A^{R} _{v'}$. To close our model, we assume an ADSD power law:
$A^{R} _{v'}$. To close our model, we assume an ADSD power law:
 \begin{equation} A^{R} (\kappa)\approx A^R_0 \kappa^{-\mu}. \end{equation}
\begin{equation} A^{R} (\kappa)\approx A^R_0 \kappa^{-\mu}. \end{equation}
It enables automatic closure calibration  $A^{R} _{v'} ( \kappa ) = A^R_0 \kappa ^{-\mu } - A^{R}_{\bar {v}} ( \kappa )$, from instantaneous large-scale current statistics
$A^{R} _{v'} ( \kappa ) = A^R_0 \kappa ^{-\mu } - A^{R}_{\bar {v}} ( \kappa )$, from instantaneous large-scale current statistics  $A^{R} _{\bar {v}}$ only (Resseguier et al. Reference Resseguier, Pan and Fox-Kemper2020b), as illustrated in figure 1.
$A^{R} _{\bar {v}}$ only (Resseguier et al. Reference Resseguier, Pan and Fox-Kemper2020b), as illustrated in figure 1.

Figure 1. (a) Kinetic energy (KE) spectrum (m $^2$ s
$^2$ s $^{-2}$/ (rad m
$^{-2}$/ (rad m $^{-1}$)) and (b) ADSD (m
$^{-1}$)) and (b) ADSD (m $^2$ s
$^2$ s $^{-1}$/ (rad m
$^{-1}$/ (rad m $^{-1}$)) of the resolved high-resolution velocity
$^{-1}$)) of the resolved high-resolution velocity  $A^{R}$ in red, low-resolution velocity
$A^{R}$ in red, low-resolution velocity  $A^{R}_{\bar {v}}$ in blue, and modelled stochastic velocity
$A^{R}_{\bar {v}}$ in blue, and modelled stochastic velocity  $A^{R} _{v'} ( \kappa ) = A^R_0 \kappa ^{-\mu } - A^{R}_{\bar {v}} (\kappa )$ in green. For the ADSD power law
$A^{R} _{v'} ( \kappa ) = A^R_0 \kappa ^{-\mu } - A^{R}_{\bar {v}} (\kappa )$ in green. For the ADSD power law  $A^{R} (\kappa )\approx A^R_0 \kappa ^{-\mu }$, we impose the theoretical kinetic energy spectrum slope
$A^{R} (\kappa )\approx A^R_0 \kappa ^{-\mu }$, we impose the theoretical kinetic energy spectrum slope  $- \frac 5 3$ (black solid line), coherently with homogeneous surface quasi-geostrophic dynamics (see § 5). The residual ADSD (green line) is set to extrapolate that power law at small scales.
$- \frac 5 3$ (black solid line), coherently with homogeneous surface quasi-geostrophic dynamics (see § 5). The residual ADSD (green line) is set to extrapolate that power law at small scales.
4. Statistical wave dynamics
In a stochastic framework, the Stratonovich or Itō notations can both be used (Kunita Reference Kunita1997; Oksendal Reference Oksendal1998). Under Stratonovich calculus rules, expressions become similar to deterministic ones. Specifically, stochastic versions of linearized dynamical equations are obtained by replacing  $\boldsymbol {v}$ by
$\boldsymbol {v}$ by  $\bar {\boldsymbol {v}} + \boldsymbol {\sigma } \circ {{\mathrm {d}}} B_t/{\mathrm {d}} t$. Then the stochastic transport of phase
$\bar {\boldsymbol {v}} + \boldsymbol {\sigma } \circ {{\mathrm {d}}} B_t/{\mathrm {d}} t$. Then the stochastic transport of phase  $({{\mathrm {d}}}\phi /{{\mathrm {d}} t}) =\omega _0(\| \boldsymbol {\nabla } \phi \|)$, i.e. – up to that velocity replacement – the Stratonovich dispersion relation, is exactly (2.1). The method of characteristics also applies. Note that one can switch from Stratonovich to Itō notations, where
$({{\mathrm {d}}}\phi /{{\mathrm {d}} t}) =\omega _0(\| \boldsymbol {\nabla } \phi \|)$, i.e. – up to that velocity replacement – the Stratonovich dispersion relation, is exactly (2.1). The method of characteristics also applies. Note that one can switch from Stratonovich to Itō notations, where  $\boldsymbol {v}'$ corresponds to
$\boldsymbol {v}'$ corresponds to  $\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t/{\mathrm {d}} t$. The characteristics equations (2.2)–(2.3) also remain unchanged for homogeneous and isotropic
$\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t/{\mathrm {d}} t$. The characteristics equations (2.2)–(2.3) also remain unchanged for homogeneous and isotropic  $\boldsymbol {v}'$:
$\boldsymbol {v}'$:
 \begin{equation} \begin{cases} {\mathrm{d}} \boldsymbol{x}_r =(\boldsymbol v_g^0+ \bar{\boldsymbol v})\,{\mathrm{d}} t+\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t,\\ {\mathrm{d}} \boldsymbol{k} ={-} \boldsymbol{\nabla} (\bar{\boldsymbol{v}}\,{\mathrm{d}} t+\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t)^{{\rm T}}\boldsymbol{k}. \end{cases} \end{equation}
\begin{equation} \begin{cases} {\mathrm{d}} \boldsymbol{x}_r =(\boldsymbol v_g^0+ \bar{\boldsymbol v})\,{\mathrm{d}} t+\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t,\\ {\mathrm{d}} \boldsymbol{k} ={-} \boldsymbol{\nabla} (\bar{\boldsymbol{v}}\,{\mathrm{d}} t+\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t)^{{\rm T}}\boldsymbol{k}. \end{cases} \end{equation}4.1. Single-ray stochastic differential equations
When studying a single ray in a homogeneous and isotropic turbulence (3.11), the wavevector dynamics simplifies. In the local crest-oriented frame, the influence of small-scale currents can be represented solely by four one-dimensional white noise forcings.
Notably, dynamics of wavevectors (2.3) are similar to tracer gradient dynamics (Bühler Reference Bühler2009; Plougonven & Zhang Reference Plougonven and Zhang2014). Only the coupled ray path dynamics (2.2) differs. Accordingly, we follow the notations and derivations of the mixing analysis from Lapeyre, Klein & Hua (Reference Lapeyre, Klein and Hua1999), and references therein. Without loss of generality, the large-scale velocity can be parametrized as
 \begin{equation} \bar{\boldsymbol{v}}=\bar{v} \begin{pmatrix} \cos\bar{\theta} \\ \sin\bar{\theta} \end{pmatrix}\quad \text{and} \quad \boldsymbol{\nabla}{\bar{\boldsymbol{v}}}^{{\rm T}}= \frac{1}{2} \begin{bmatrix} \bar{\sigma} \sin{2 \bar{\phi}} & \bar{\omega} + \bar{\sigma} \cos{2 \bar{\phi}} \\ -\bar{\omega} + \bar{\sigma}\cos{2 \bar{\phi}} & - \bar{\sigma} \sin{2 \bar{\phi}} \end{bmatrix}. \end{equation}
\begin{equation} \bar{\boldsymbol{v}}=\bar{v} \begin{pmatrix} \cos\bar{\theta} \\ \sin\bar{\theta} \end{pmatrix}\quad \text{and} \quad \boldsymbol{\nabla}{\bar{\boldsymbol{v}}}^{{\rm T}}= \frac{1}{2} \begin{bmatrix} \bar{\sigma} \sin{2 \bar{\phi}} & \bar{\omega} + \bar{\sigma} \cos{2 \bar{\phi}} \\ -\bar{\omega} + \bar{\sigma}\cos{2 \bar{\phi}} & - \bar{\sigma} \sin{2 \bar{\phi}} \end{bmatrix}. \end{equation}
Figure 2 provides a synthetic view of angles involved. The dynamics wave group centroid  $\boldsymbol {x}_r$ is driven directly by the large current wave group velocity
$\boldsymbol {x}_r$ is driven directly by the large current wave group velocity  $\boldsymbol v_g^0 + \bar {\boldsymbol v}$. The influence of the large-scalecurrent gradients on the wavevector dynamics (4.1), expressed in the local crest-oriented frame
$\boldsymbol v_g^0 + \bar {\boldsymbol v}$. The influence of the large-scalecurrent gradients on the wavevector dynamics (4.1), expressed in the local crest-oriented frame  $(\tilde {\boldsymbol {k}}, \tilde {\boldsymbol {k}}^\bot )$, is straightforward (Lapeyre et al. Reference Lapeyre, Klein and Hua1999). The small-scale currents force the ray dynamics through a stochastic noise. For a single ray
$(\tilde {\boldsymbol {k}}, \tilde {\boldsymbol {k}}^\bot )$, is straightforward (Lapeyre et al. Reference Lapeyre, Klein and Hua1999). The small-scale currents force the ray dynamics through a stochastic noise. For a single ray  $(\boldsymbol {x}_r,\boldsymbol {k})=(x_r, y_r,k \cos \theta _k, k \sin \theta _k)$, this noise can be described rigorously by four independent one-dimensional white noises only (see Appendix A),
$(\boldsymbol {x}_r,\boldsymbol {k})=(x_r, y_r,k \cos \theta _k, k \sin \theta _k)$, this noise can be described rigorously by four independent one-dimensional white noises only (see Appendix A),  $\dot {B}_t^{(1)}$,
$\dot {B}_t^{(1)}$,  $\dot {B}_t^{(2)}$,
$\dot {B}_t^{(2)}$,  $\dot {B}_t^{(3)}$ and
$\dot {B}_t^{(3)}$ and  $\dot {B}_t^{(4)}$, and
$\dot {B}_t^{(4)}$, and
 $$\begin{gather} \frac{{\mathrm{d}} }{{\mathrm{d}} t} x_{r}= v_g^0\cos {\theta}_k + \bar{v} \cos \bar{\theta} + \sqrt{a_0}\,{\dot{B}_t^{(1)}}, \end{gather}$$
$$\begin{gather} \frac{{\mathrm{d}} }{{\mathrm{d}} t} x_{r}= v_g^0\cos {\theta}_k + \bar{v} \cos \bar{\theta} + \sqrt{a_0}\,{\dot{B}_t^{(1)}}, \end{gather}$$ $$\begin{gather}\frac{{\mathrm{d}}}{{\mathrm{d}} t} y_{r} = v_g^0\sin {\theta}_k + \bar{v} \sin \bar{\theta} + \sqrt{a_0}\,{\dot{B}_t^{(2)}}, \end{gather}$$
$$\begin{gather}\frac{{\mathrm{d}}}{{\mathrm{d}} t} y_{r} = v_g^0\sin {\theta}_k + \bar{v} \sin \bar{\theta} + \sqrt{a_0}\,{\dot{B}_t^{(2)}}, \end{gather}$$ $$\begin{gather}\frac{{\mathrm{d}} }{{\mathrm{d}} t} \log k ={-}\bar{\sigma} \sin(\zeta) + \gamma_0 + \sqrt{\gamma_0}\,{\dot{B}_t^{(3)}}, \end{gather}$$
$$\begin{gather}\frac{{\mathrm{d}} }{{\mathrm{d}} t} \log k ={-}\bar{\sigma} \sin(\zeta) + \gamma_0 + \sqrt{\gamma_0}\,{\dot{B}_t^{(3)}}, \end{gather}$$ $$\begin{gather}\frac{{\mathrm{d}} }{{\mathrm{d}} t} {\theta}_{k} = \frac{1}{2}\,(\bar{\omega} - \bar{\sigma} \cos(\zeta) ) + \sqrt{3 \gamma_0}\,{ \dot{B}_t^{(4)}}, \end{gather}$$
$$\begin{gather}\frac{{\mathrm{d}} }{{\mathrm{d}} t} {\theta}_{k} = \frac{1}{2}\,(\bar{\omega} - \bar{\sigma} \cos(\zeta) ) + \sqrt{3 \gamma_0}\,{ \dot{B}_t^{(4)}}, \end{gather}$$
where  $\zeta = {2({\theta }_{k}+\bar {\phi })}$ and
$\zeta = {2({\theta }_{k}+\bar {\phi })}$ and
 $$\begin{gather} a_0=\frac 1{2\,{\mathrm{d}} t}\,\mathbb{E}\| \boldsymbol{\sigma}\,{{\mathrm{d}}} B_t \|^2= \int_0^{+\infty} A^{R} _{v'} (\kappa) \,{\mathrm{d}} \kappa, \end{gather}$$
$$\begin{gather} a_0=\frac 1{2\,{\mathrm{d}} t}\,\mathbb{E}\| \boldsymbol{\sigma}\,{{\mathrm{d}}} B_t \|^2= \int_0^{+\infty} A^{R} _{v'} (\kappa) \,{\mathrm{d}} \kappa, \end{gather}$$ $$\begin{gather}\gamma_0 = \frac 1{8\,{\mathrm{d}} t}\,\mathbb{E} \| \boldsymbol{\nabla}_{\boldsymbol{x}} (\boldsymbol{\sigma}\,{{\mathrm{d}}} B_t)^{{\rm T}} \|^2 = \frac 14 \int_0^{+\infty} k^2\,A^{R} _{v'} (\kappa) \,{\mathrm{d}} \kappa. \end{gather}$$
$$\begin{gather}\gamma_0 = \frac 1{8\,{\mathrm{d}} t}\,\mathbb{E} \| \boldsymbol{\nabla}_{\boldsymbol{x}} (\boldsymbol{\sigma}\,{{\mathrm{d}}} B_t)^{{\rm T}} \|^2 = \frac 14 \int_0^{+\infty} k^2\,A^{R} _{v'} (\kappa) \,{\mathrm{d}} \kappa. \end{gather}$$
Diffusivity constants depend through (3.10) on both the correlation length and the spectrum slope of the small-scale velocity. In contrast to the classical fast wave approximation, the wavenumber does vary. This is due to (i) the finite large-scale strain rate  $\bar {\sigma }$, and (ii) the small-scale isotropic velocity model (3.11). This isotropy assumption and its implication are discussed in Appendix C. Note that neither the large-scale component nor the small-scale component is assumed to be steady, even though that Eulerian velocity unsteadiness is only a secondary process in the wave dynamics. The fast temporal variations seen by the wave are driven mainly by the large wave speed and not by the Eulerian velocity unsteadiness. The current unsteadiness can also lead to wavenumber variations (Dong, Bühler & Smith Reference Dong, Bühler and Smith2020; Boury et al. Reference Boury, Bühler and Shatah2023; Cox, Kafiabad & Vanneste Reference Cox, Kafiabad and Vanneste2023). Given a known wavevector angle, it leads to a wavenumber evolution
$\bar {\sigma }$, and (ii) the small-scale isotropic velocity model (3.11). This isotropy assumption and its implication are discussed in Appendix C. Note that neither the large-scale component nor the small-scale component is assumed to be steady, even though that Eulerian velocity unsteadiness is only a secondary process in the wave dynamics. The fast temporal variations seen by the wave are driven mainly by the large wave speed and not by the Eulerian velocity unsteadiness. The current unsteadiness can also lead to wavenumber variations (Dong, Bühler & Smith Reference Dong, Bühler and Smith2020; Boury et al. Reference Boury, Bühler and Shatah2023; Cox, Kafiabad & Vanneste Reference Cox, Kafiabad and Vanneste2023). Given a known wavevector angle, it leads to a wavenumber evolution
 \begin{equation} k(t) = k(0)\exp \left(- \int_0^t \bar{\sigma} \sin({2({\theta}_{k}+\bar{\phi})}) \,{\rm d} t'\right) \exp (\gamma_0 t + \sqrt{\gamma_0}\,B_t^{(3)}), \end{equation}
\begin{equation} k(t) = k(0)\exp \left(- \int_0^t \bar{\sigma} \sin({2({\theta}_{k}+\bar{\phi})}) \,{\rm d} t'\right) \exp (\gamma_0 t + \sqrt{\gamma_0}\,B_t^{(3)}), \end{equation}
and hence to the complete wavevector distribution, i.e. the wave spectrum. The second exponential factor in (4.9) is a geometric Brownian motion. Its mean diverges in time exponentially rapidly. Physically, shear and strain of  $\boldsymbol {v}'$ tends to shorten the wavelength (Voronovich Reference Voronovich1991; Boury et al. Reference Boury, Bühler and Shatah2023) leading to this exponential divergence. This factor has a log-normal distribution, suggesting possible extreme transient wavenumber events. This generalizes previous results (Voronovich Reference Voronovich1991; Klyatskin & Koshel Reference Klyatskin and Koshel2015), obtained with neglecting the time-correlated current component
$\boldsymbol {v}'$ tends to shorten the wavelength (Voronovich Reference Voronovich1991; Boury et al. Reference Boury, Bühler and Shatah2023) leading to this exponential divergence. This factor has a log-normal distribution, suggesting possible extreme transient wavenumber events. This generalizes previous results (Voronovich Reference Voronovich1991; Klyatskin & Koshel Reference Klyatskin and Koshel2015), obtained with neglecting the time-correlated current component  $\bar {\boldsymbol {v}}$.
$\bar {\boldsymbol {v}}$.

Figure 2. Schematic view of vectors and angles involved in single-ray dynamics, where  $\bar {\boldsymbol {S}}_-$ and
$\bar {\boldsymbol {S}}_-$ and  $\bar {\boldsymbol {S}}_+$ are respectively compression and dilatation axes associated with the large-scale velocity gradient
$\bar {\boldsymbol {S}}_+$ are respectively compression and dilatation axes associated with the large-scale velocity gradient  $\boldsymbol {\nabla }{\bar {\boldsymbol {v}}}^{{\rm T}}$.
$\boldsymbol {\nabla }{\bar {\boldsymbol {v}}}^{{\rm T}}$.
For completeness, the action distribution over space and wavevector can be derived. Some approaches consider finite-size wave trains either through additional equations (Jonsson Reference Jonsson1990; White & Fornberg Reference White and Fornberg1998) or re-meshing (Hell, Fox-Kemper & Chapron submitted). Otherwise, each ray transports its action spectrum (2.6), and we need to numerically combine many rays (Lavrenov Reference Lavrenov2013), or rely on analytic approximations. Typically, we solve (4.3)–(4.5), exhibiting  $p(\boldsymbol {x},\boldsymbol {k} \,|\, \boldsymbol {x}_r^0,\boldsymbol {k}_r^0,t)$, the distribution of the ray
$p(\boldsymbol {x},\boldsymbol {k} \,|\, \boldsymbol {x}_r^0,\boldsymbol {k}_r^0,t)$, the distribution of the ray  $(\boldsymbol {x},\boldsymbol {k})$ at time
$(\boldsymbol {x},\boldsymbol {k})$ at time  $t$ given initial conditions
$t$ given initial conditions  $(\boldsymbol {x}_r^0,\boldsymbol {k}^0)$. Then by analogy with tracers in incompressible turbulence (Piterbarg & Ostrovskii Reference Piterbarg and Ostrovskii1997, (1.31); see also Appendix D), we can evaluate the wave action spectrum mean – or any pointwise statistics – as
$(\boldsymbol {x}_r^0,\boldsymbol {k}^0)$. Then by analogy with tracers in incompressible turbulence (Piterbarg & Ostrovskii Reference Piterbarg and Ostrovskii1997, (1.31); see also Appendix D), we can evaluate the wave action spectrum mean – or any pointwise statistics – as
 \begin{equation} \mathbb{E} N(\boldsymbol{x},\boldsymbol{k},t)= \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}^0\,N^0(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0)\,p(\boldsymbol{x},\boldsymbol{k} \,|\, \boldsymbol{x}_r^0,\boldsymbol{k}^0,t), \end{equation}
\begin{equation} \mathbb{E} N(\boldsymbol{x},\boldsymbol{k},t)= \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}^0\,N^0(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0)\,p(\boldsymbol{x},\boldsymbol{k} \,|\, \boldsymbol{x}_r^0,\boldsymbol{k}^0,t), \end{equation}
where  $N^0$ is the initial wave action spectrum. Integrating this expression over wavevectors, we note that the distribution inside the integrals changes:
$N^0$ is the initial wave action spectrum. Integrating this expression over wavevectors, we note that the distribution inside the integrals changes:
 \begin{equation} \mathbb{E} A(\boldsymbol{x},t)= \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}^0\, N^0(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0)\,p(\boldsymbol{x} \,|\, \boldsymbol{x}_r^0,\boldsymbol{k}^0,t). \end{equation}
\begin{equation} \mathbb{E} A(\boldsymbol{x},t)= \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}^0\, N^0(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0)\,p(\boldsymbol{x} \,|\, \boldsymbol{x}_r^0,\boldsymbol{k}^0,t). \end{equation}
The wave action mean depends solely on group positions distribution. Multi-point action statistics – e.g. focusing  $\mathbb {E}\|\boldsymbol{\nabla} _x A\|^2$ – rely on multi-ray correlations, encoded in the stochastic characteristic equations (4.1), but not the simplified model (4.3)–(4.6). Alternatively, Eulerian descriptions of wave action dynamics directly provide action distribution over space and wavevector.
$\mathbb {E}\|\boldsymbol{\nabla} _x A\|^2$ – rely on multi-ray correlations, encoded in the stochastic characteristic equations (4.1), but not the simplified model (4.3)–(4.6). Alternatively, Eulerian descriptions of wave action dynamics directly provide action distribution over space and wavevector.
4.2. Eulerian dynamics and action diffusion
Wave action spectrum is transported along a four-dimensional volume-preserving stochastic flow (4.1). Again by analogy with incompressible turbulence (Resseguier et al. Reference Resseguier, Mémin and Chapron2017a), the stochastic transport of wave action spectrum in Itō notations reads
 \begin{align} & \partial_t N + \left(\boldsymbol{v}_g^0 + \bar{\boldsymbol{v}} + \boldsymbol{\sigma}\,\frac{{{\mathrm{d}}} B_t}{{\mathrm{d}} t}\right) \boldsymbol{\cdot}\boldsymbol{\nabla}_{\boldsymbol{x}} N + \left(-\boldsymbol{\nabla}_{\boldsymbol{x}} \left(\bar{\boldsymbol{v}} + \boldsymbol{\sigma}\,\frac{{{\mathrm{d}}} B_t}{{\mathrm{d}} t}\right)^{{\rm T}} \boldsymbol{k}\right) \boldsymbol{\cdot} \boldsymbol{\nabla}_{\boldsymbol{k}} N \nonumber\\ &\quad =\begin{bmatrix} \boldsymbol{\nabla}_{\boldsymbol{x}} \\ \boldsymbol{\nabla}_{\boldsymbol{k}} \end{bmatrix}\boldsymbol{\cdot} \left(\boldsymbol{\mathsf{D}} \begin{bmatrix} \boldsymbol{\nabla}_{\boldsymbol{x}} \\ \boldsymbol{\nabla}_{\boldsymbol{k}} \end{bmatrix}N\right) =\frac 1 2\,a_0\,\Delta_{\boldsymbol{x}}N+\frac 1 2\,\gamma_0\, \frac 1 {k}\,\partial_{k}\left(k^3\,\partial_{k}N\right) +\frac 3 2\,\gamma_0\,\partial^2_{\theta_k}N. \end{align}
\begin{align} & \partial_t N + \left(\boldsymbol{v}_g^0 + \bar{\boldsymbol{v}} + \boldsymbol{\sigma}\,\frac{{{\mathrm{d}}} B_t}{{\mathrm{d}} t}\right) \boldsymbol{\cdot}\boldsymbol{\nabla}_{\boldsymbol{x}} N + \left(-\boldsymbol{\nabla}_{\boldsymbol{x}} \left(\bar{\boldsymbol{v}} + \boldsymbol{\sigma}\,\frac{{{\mathrm{d}}} B_t}{{\mathrm{d}} t}\right)^{{\rm T}} \boldsymbol{k}\right) \boldsymbol{\cdot} \boldsymbol{\nabla}_{\boldsymbol{k}} N \nonumber\\ &\quad =\begin{bmatrix} \boldsymbol{\nabla}_{\boldsymbol{x}} \\ \boldsymbol{\nabla}_{\boldsymbol{k}} \end{bmatrix}\boldsymbol{\cdot} \left(\boldsymbol{\mathsf{D}} \begin{bmatrix} \boldsymbol{\nabla}_{\boldsymbol{x}} \\ \boldsymbol{\nabla}_{\boldsymbol{k}} \end{bmatrix}N\right) =\frac 1 2\,a_0\,\Delta_{\boldsymbol{x}}N+\frac 1 2\,\gamma_0\, \frac 1 {k}\,\partial_{k}\left(k^3\,\partial_{k}N\right) +\frac 3 2\,\gamma_0\,\partial^2_{\theta_k}N. \end{align}
The right-hand side is reminiscent of (3.16) in Bôas & Young (Reference Bôas and Young2020), and (36) in Smit & Janssen (Reference Smit and Janssen2019), and more generally of rapid wave models. Nevertheless, (4.12) is not averaged and explicitly involves large-scale currents and noise terms (terms with factor  ${{{\mathrm {d}}} B_t}/{{\mathrm {d}} t}$). Differences with Smit & Janssen (Reference Smit and Janssen2019) and Bôas & Young (Reference Bôas and Young2020) for the diffusivity estimates and the detailed computation of the
${{{\mathrm {d}}} B_t}/{{\mathrm {d}} t}$). Differences with Smit & Janssen (Reference Smit and Janssen2019) and Bôas & Young (Reference Bôas and Young2020) for the diffusivity estimates and the detailed computation of the  $4\times 4$ diffusion matrix
$4\times 4$ diffusion matrix  $\boldsymbol{\mathsf{D}}$ can be found in Appendix A. Itō notations for (4.12) explicitly separate mean terms (e.g. diffusion terms) and zero-mean noise terms. Here, the Eulerian Itō notations reveal that coefficients
$\boldsymbol{\mathsf{D}}$ can be found in Appendix A. Itō notations for (4.12) explicitly separate mean terms (e.g. diffusion terms) and zero-mean noise terms. Here, the Eulerian Itō notations reveal that coefficients  $\frac 1 2 a_0$,
$\frac 1 2 a_0$,  $\frac 1 2 \gamma _0$ and
$\frac 1 2 \gamma _0$ and  $\frac 32 \gamma _0$ act to diffuse wave action in space, wavenumber and wavevector angle, respectively.
$\frac 32 \gamma _0$ act to diffuse wave action in space, wavenumber and wavevector angle, respectively.
5. Numerical experiments
To illustrate these developments, we consider ocean surface gravity waves propagating over a dynamical flow region. Ray tracing through synthetic surface currents will provide a benchmark. It will be shown that a broad range of the current scales can be replaced by the stochastic parametrization (3.11) without affecting ray scattering and action distribution. Theoretical results (4.3)–(4.12) will suggest approximate analytic solutions.
5.1. Surface current dynamics
Simplified upper ocean dynamics are considered to follow
 \begin{equation} (\partial_t + \boldsymbol{v} \boldsymbol{\cdot} \boldsymbol{\nabla}) \varTheta= 0, \quad \text{with } \boldsymbol{v}={-} \boldsymbol{\nabla}^{\bot} (-\varDelta)^{-\xi} \varTheta, \end{equation}
\begin{equation} (\partial_t + \boldsymbol{v} \boldsymbol{\cdot} \boldsymbol{\nabla}) \varTheta= 0, \quad \text{with } \boldsymbol{v}={-} \boldsymbol{\nabla}^{\bot} (-\varDelta)^{-\xi} \varTheta, \end{equation}
where  $\varTheta$ stands for the buoyancy,
$\varTheta$ stands for the buoyancy,  $\boldsymbol {\nabla }^{\bot }$ for the curl, and
$\boldsymbol {\nabla }^{\bot }$ for the curl, and  $\varDelta$ for the Laplacian. Two extreme cases are the surface quasi-geostrophic (SQG) dynamics (
$\varDelta$ for the Laplacian. Two extreme cases are the surface quasi-geostrophic (SQG) dynamics ( $\xi = \frac 12$) (Held et al. Reference Held, Pierrehumbert, Garner and Swanson1995; Lapeyre Reference Lapeyre2017), and the 2-D Euler dynamics (
$\xi = \frac 12$) (Held et al. Reference Held, Pierrehumbert, Garner and Swanson1995; Lapeyre Reference Lapeyre2017), and the 2-D Euler dynamics ( $\xi = 1$). The SQG dynamics has an extreme locality (kinetic energy spectrum slope
$\xi = 1$). The SQG dynamics has an extreme locality (kinetic energy spectrum slope  $-5/3$), whereas 2-D Euler dynamics has an extreme non-locality (kinetic energy spectrum slope
$-5/3$), whereas 2-D Euler dynamics has an extreme non-locality (kinetic energy spectrum slope  $-3$). The objective is to test how the proposed closures apply to both dynamics to be equally useful for any more realistic upper ocean dynamics. Additionally, test cases are developed to assess the multiscale stochastic closure in both homogeneous and heterogeneous propagating media. Moreover, we would like to challenge our closure beyond the validity of rapid wave models. In our first test case, surface fast waves travel in a homogeneous and isotropic SQG turbulence. Then we simulate waves propagating in a spatially heterogeneous 2-D Euler turbulence, mimicking an oceanic jet. For both SQG and 2-D Euler dynamics, a reference simulation is obtained at resolution
$-3$). The objective is to test how the proposed closures apply to both dynamics to be equally useful for any more realistic upper ocean dynamics. Additionally, test cases are developed to assess the multiscale stochastic closure in both homogeneous and heterogeneous propagating media. Moreover, we would like to challenge our closure beyond the validity of rapid wave models. In our first test case, surface fast waves travel in a homogeneous and isotropic SQG turbulence. Then we simulate waves propagating in a spatially heterogeneous 2-D Euler turbulence, mimicking an oceanic jet. For both SQG and 2-D Euler dynamics, a reference simulation is obtained at resolution  $512\times 512$ for a
$512\times 512$ for a  $1000$ km
$1000$ km $^2$ domain, with the help of a pseudo-spectral code (Resseguier et al. Reference Resseguier, Mémin and Chapron2017b, Reference Resseguier, Pan and Fox-Kemper2020b). Once initialized, the current velocity
$^2$ domain, with the help of a pseudo-spectral code (Resseguier et al. Reference Resseguier, Mémin and Chapron2017b, Reference Resseguier, Pan and Fox-Kemper2020b). Once initialized, the current velocity  $\boldsymbol {v}$ is approximately 0.1 m s
$\boldsymbol {v}$ is approximately 0.1 m s $^{-1}$ for the homogeneous turbulence, and 1 m s
$^{-1}$ for the homogeneous turbulence, and 1 m s $^{-1}$ for the jet (see figure 3).
$^{-1}$ for the jet (see figure 3).

Figure 3. Current velocity norms of (a) the SQG homogeneous turbulence and (b) the 2-D Euler jet current at high resolution ( $512\times 512$).
$512\times 512$).
5.2. Rays scattering in homogeneous SQG turbulence
A wave system enters the bottom boundary, propagating to the top. The carrier incident wave has intrinsic wave group velocity 10 m s $^{-1}$, i.e. wavelength
$^{-1}$, i.e. wavelength  $\lambda = 250$ m. Its envelope is Gaussian with isotropic spatial extension
$\lambda = 250$ m. Its envelope is Gaussian with isotropic spatial extension  $30 \lambda$. Figures 4(a) and 5(a) illustrate the resulting dynamics, spreading the wavevectors (figure 5) of the incoming waves. From bottom to top, spectral diffusion occurs (figure 5) in the direction orthogonal (here
$30 \lambda$. Figures 4(a) and 5(a) illustrate the resulting dynamics, spreading the wavevectors (figure 5) of the incoming waves. From bottom to top, spectral diffusion occurs (figure 5) in the direction orthogonal (here  $k_x$) to the propagation (here
$k_x$) to the propagation (here  $k_y$), in line with the additive noise appearing in (4.6). This scattering accelerates – along the propagation – the wave position spread (figure 4). This acceleration is explained by the ray equation (4.3) dominated by the intrinsic wave group velocity.
$k_y$), in line with the additive noise appearing in (4.6). This scattering accelerates – along the propagation – the wave position spread (figure 4). This acceleration is explained by the ray equation (4.3) dominated by the intrinsic wave group velocity.

Figure 4. Swell (wavelength  $\lambda = 250$ m) interacting with (a) a high-resolution (
$\lambda = 250$ m) interacting with (a) a high-resolution ( $512\times 512$) deterministic SQG current, (b) a low-resolution (
$512\times 512$) deterministic SQG current, (b) a low-resolution ( $32\times 32$) deterministic SQG current, and (c) a low-resolution (
$32\times 32$) deterministic SQG current, and (c) a low-resolution ( $32\times 32$) deterministic SQG current plus (one realization of) the time-uncorrelated stochastic model – coloured by the corresponding wave amplitude,
$32\times 32$) deterministic SQG current plus (one realization of) the time-uncorrelated stochastic model – coloured by the corresponding wave amplitude,  $h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the current vorticity
$h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the current vorticity  $\omega = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \boldsymbol {v}$. The red crosses indicate where the bidirectional wave spectra of figure 5 are computed.
$\omega = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \boldsymbol {v}$. The red crosses indicate where the bidirectional wave spectra of figure 5 are computed.

Figure 5. Bidirectional wave spectra, computed by backward advection, at eight locations along a vertical axis (the mean wave propagation direction) resulting from a swell interacting with (a) a high-resolution ( $512\times 512$) deterministic SQG current, (b) a low-resolution (
$512\times 512$) deterministic SQG current, (b) a low-resolution ( $32\times 32$) deterministic SQG current, and (c) a low-resolution (
$32\times 32$) deterministic SQG current, and (c) a low-resolution ( $32\times 32$) deterministic SQG current plus (one realization of) the stochastic model (3.11). The spatial locations where the spectra are calculated are highlighted in figure 4 by the red crosses.
$32\times 32$) deterministic SQG current plus (one realization of) the stochastic model (3.11). The spatial locations where the spectra are calculated are highlighted in figure 4 by the red crosses.
To mimic a badly resolved  $\bar {\boldsymbol v}$ field,
$\bar {\boldsymbol v}$ field,  ${\boldsymbol v}$ is smoothed at resolution
${\boldsymbol v}$ is smoothed at resolution  $32\times 32$. Using this coarse-scale current in figures 4(b) and 5(b), the scattering – described in the previous paragraph – is strongly depleting in comparison to ray tracing in fully-resolved turbulence. The spectral diffusion induced by small-scale turbulence is missing. Thus the spatial spreading also is narrower compared to high-resolution simulations. A stochastic current
$32\times 32$. Using this coarse-scale current in figures 4(b) and 5(b), the scattering – described in the previous paragraph – is strongly depleting in comparison to ray tracing in fully-resolved turbulence. The spectral diffusion induced by small-scale turbulence is missing. Thus the spatial spreading also is narrower compared to high-resolution simulations. A stochastic current  $\boldsymbol {v}'$ is then added for ray tracing (4.1). This stochastic component is divergence-free and has a self-similar distribution of energy across spatial scales (3.11) (see figure 1). The resulting spatial and spectral spreads are now comparable to simulations with high-resolution currents. For this setting, the stochastic closure provides satisfying results for a sufficiently well-resolved large-scale current. The key decorrelation ratio
$\boldsymbol {v}'$ is then added for ray tracing (4.1). This stochastic component is divergence-free and has a self-similar distribution of energy across spatial scales (3.11) (see figure 1). The resulting spatial and spectral spreads are now comparable to simulations with high-resolution currents. For this setting, the stochastic closure provides satisfying results for a sufficiently well-resolved large-scale current. The key decorrelation ratio  $\epsilon = ({l_{v'}}/{l_{v}}) ({\|\boldsymbol {v}\|}/{v_g^0})$ indeed depends on the resolution through
$\epsilon = ({l_{v'}}/{l_{v}}) ({\|\boldsymbol {v}\|}/{v_g^0})$ indeed depends on the resolution through  $l_{v'}$. The large-scale current
$l_{v'}$. The large-scale current  $\bar {\boldsymbol {v}}$ is resolved on a
$\bar {\boldsymbol {v}}$ is resolved on a  $32\times 32$ grid, i.e. with resolution
$32\times 32$ grid, i.e. with resolution  $l_{v'} = ({\|\boldsymbol {\nabla } {\boldsymbol {v}}^{{\rm T}}\|}/{\|\boldsymbol {\nabla } {\boldsymbol {v}'}^{{\rm T}}\|}) l_{v} = 0.33 l_{v}$. As such,
$l_{v'} = ({\|\boldsymbol {\nabla } {\boldsymbol {v}}^{{\rm T}}\|}/{\|\boldsymbol {\nabla } {\boldsymbol {v}'}^{{\rm T}}\|}) l_{v} = 0.33 l_{v}$. As such,  $\epsilon = 4.1 \times 10^{-3}$, computed with
$\epsilon = 4.1 \times 10^{-3}$, computed with  $v_g^0 \approx 10$ m s
$v_g^0 \approx 10$ m s $^{-1}$ and
$^{-1}$ and  $\|\boldsymbol {v}\|\approx 0.12$ m s
$\|\boldsymbol {v}\|\approx 0.12$ m s $^{-1}$, so
$^{-1}$, so  ${\|\boldsymbol {v}\|}/{v_g^0} \approx 1.2\times 10^{-2}$, which is sufficiently small to make the proposed model applicable.
${\|\boldsymbol {v}\|}/{v_g^0} \approx 1.2\times 10^{-2}$, which is sufficiently small to make the proposed model applicable.
From the ADSD estimate (3.10) (illustrated by figure 1) and (4.7)–(4.8), evaluations of the diffusivity coefficients  $a_0$ and
$a_0$ and  $\gamma _0$ are straightforward. As discussed previously (Smit & Janssen Reference Smit and Janssen2019), the spatial diffusivity is extremely weak:
$\gamma _0$ are straightforward. As discussed previously (Smit & Janssen Reference Smit and Janssen2019), the spatial diffusivity is extremely weak:  $a_0 = 6.4 \times 10^{-1}$ m
$a_0 = 6.4 \times 10^{-1}$ m $^2$ s
$^2$ s $^{-1}$ (spatial variations in ray equations (4.3)–(4.4) of approximately
$^{-1}$ (spatial variations in ray equations (4.3)–(4.4) of approximately  $\sqrt {a_0 t} = 230$ m during
$\sqrt {a_0 t} = 230$ m during  $1$ day). In contrast, the spectral angle diffusivity is large:
$1$ day). In contrast, the spectral angle diffusivity is large:  $3 \gamma _0 = 3.0 \times 10^{-8}$ rad
$3 \gamma _0 = 3.0 \times 10^{-8}$ rad $^2$ s
$^2$ s $^{-1}$. Along our
$^{-1}$. Along our  $1$-day simulation, neglecting large-scale velocity influence, (4.6) leads to Brownian wavevector angle variations
$1$-day simulation, neglecting large-scale velocity influence, (4.6) leads to Brownian wavevector angle variations  $\delta \theta _k =\theta _k - \theta _k(0) = \sqrt {3 \gamma _0}\,B_t^{(4)}$ with standard deviation
$\delta \theta _k =\theta _k - \theta _k(0) = \sqrt {3 \gamma _0}\,B_t^{(4)}$ with standard deviation  $\sigma _{\delta \theta _k} = \sqrt {3 \gamma _0 t} = 5.2 \times 10^{-2}$ rad
$\sigma _{\delta \theta _k} = \sqrt {3 \gamma _0 t} = 5.2 \times 10^{-2}$ rad  $\approx 3.0^{\circ }$, eventually increasing the wave group spectral maximal extension from
$\approx 3.0^{\circ }$, eventually increasing the wave group spectral maximal extension from  $\pm 2\sigma _{ k_x} = \pm 2({2{\rm \pi} }/{30 \lambda }) = \pm 1.7 \times 10^{-3}$ rad m
$\pm 2\sigma _{ k_x} = \pm 2({2{\rm \pi} }/{30 \lambda }) = \pm 1.7 \times 10^{-3}$ rad m $^{-1}$ to
$^{-1}$ to  $\pm 2\sigma _{ k_x} \approx \pm 2 \sqrt {({2{\rm \pi} }/{30 \lambda })^2 + (k \sigma _{\delta \theta _k})^2} = \pm 3.1 \times 10^{-3}$ rad m
$\pm 2\sigma _{ k_x} \approx \pm 2 \sqrt {({2{\rm \pi} }/{30 \lambda })^2 + (k \sigma _{\delta \theta _k})^2} = \pm 3.1 \times 10^{-3}$ rad m $^{-1}$, confirmed by figure 5. This figure also illustrates the wave action diffusion induced by diffusivity
$^{-1}$, confirmed by figure 5. This figure also illustrates the wave action diffusion induced by diffusivity  $\gamma _0$, well predicted by the Eulerian wave action model (4.12). In this scattering regime, the increased angle variability leads, by advection, to a spatial spread. The simplified ray equation (4.3) gives
$\gamma _0$, well predicted by the Eulerian wave action model (4.12). In this scattering regime, the increased angle variability leads, by advection, to a spatial spread. The simplified ray equation (4.3) gives  $\delta x \approx \int _0^t v_g^0 \cos {\theta }_k \,{\rm d} t' \approx v_g^0 \int _0^t \delta {\theta }_k \,{\rm d} t' \approx v_g^0 \sqrt {3 \gamma _0} \int _0^t B_{t'}^{(4)} \,{\rm d} t'$ with maximal extension
$\delta x \approx \int _0^t v_g^0 \cos {\theta }_k \,{\rm d} t' \approx v_g^0 \int _0^t \delta {\theta }_k \,{\rm d} t' \approx v_g^0 \sqrt {3 \gamma _0} \int _0^t B_{t'}^{(4)} \,{\rm d} t'$ with maximal extension  $\pm 2\sigma _{x} \approx \pm 2 v_g^0 \sqrt { \gamma _0 t^3} \approx \pm 52$ km, in agreement with figure 4. Finally, we estimate a first-order delay along the propagation
$\pm 2\sigma _{x} \approx \pm 2 v_g^0 \sqrt { \gamma _0 t^3} \approx \pm 52$ km, in agreement with figure 4. Finally, we estimate a first-order delay along the propagation
 \begin{align}
\delta t = t - (y - y(0))/v_g^0 \approx \int _0^t ( 1 - \sin {\theta }_k )
{\rm d}t' \approx \frac {1}{2} \int _0^t \delta {\theta }_k^2 \,{\rm d} t' \approx
\frac {3 }{2} \gamma _0 \int _0^t ( B_{t'}^{(4)} )^2 \,{\rm d} t',
\end{align}
\begin{align}
\delta t = t - (y - y(0))/v_g^0 \approx \int _0^t ( 1 - \sin {\theta }_k )
{\rm d}t' \approx \frac {1}{2} \int _0^t \delta {\theta }_k^2 \,{\rm d} t' \approx
\frac {3 }{2} \gamma _0 \int _0^t ( B_{t'}^{(4)} )^2 \,{\rm d} t',
\end{align}
with mean value  $\mathbb {E} \delta t = \frac {3}{4} \gamma _0 t^2$.
$\mathbb {E} \delta t = \frac {3}{4} \gamma _0 t^2$.
5.3. Wave groups trapped in a 2-D Euler turbulent jet
Tests are now performed for rays travelling in fast and strongly heterogeneous 2-D Euler flows. Classical fast wave models – assuming flows of weak amplitude and often uniform statistics – are expected to fail here. Jets exhibit strong current gradients (e.g. Kudryavtsev et al. Reference Kudryavtsev, Yurovskaya, Chapron, Collard and Donlon2017), creating strong ray focusing and possibly rogue events. Passing through localized spatial structures, caustics can appear, but solely from unrealistically collimated wave trains (White & Fornberg Reference White and Fornberg1998; Heller, Kaplan & Dahlen Reference Heller, Kaplan and Dahlen2008; Wang et al. Reference Wang, Bôas, Young and Vanneste2023).
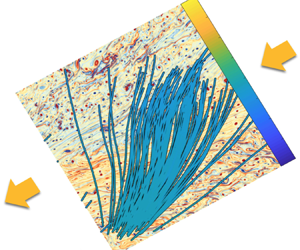
Occurrences strongly reduce for finite directional spread (Slunyaev & Shrira Reference Slunyaev and Shrira2023). Here, wave groups are trapped in a jet, but nonlinear wave interactions are neglected. The high-resolution numerical simulations (see figure 6) reveal that even linear wave trains are well trapped in adversarial currents. Freund & Fleischman (Reference Freund and Fleischman2002) observed a similar behaviour for acoustic waves in a three-dimensional turbulent jet. Note that during our simulation, rays cross the domain several times (because of the doubly periodic boundary conditions; see Appendix E for technical details). At the top (resp. bottom) of the jet, the vorticity and thus – at first order – rays curvatures (Dysthe Reference Dysthe2001) are negative (resp. positive). Therefore, rays oscillate around the jet. A toy model can explain this behaviour. Following the multiscale stochastic approach (4.3)–(4.6), wave scattering is also taken into account.

Figure 6. Rays facing a high-resolution ( $512\times 512$) deterministic 2-D Euler jet current – coloured by the corresponding wave amplitude
$512\times 512$) deterministic 2-D Euler jet current – coloured by the corresponding wave amplitude  $h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the current vorticity
$h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the current vorticity  $\omega = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \boldsymbol {v}$ (top colour bars).
$\omega = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \boldsymbol {v}$ (top colour bars).
For very-coarse-grained ( $4\times 4$) current
$4\times 4$) current  $\bar {\boldsymbol {v}}$, oscillation remains, but most of the scattering vanishes, as illustrated by figure 7. Moreover, the curvature of the jet creates artificial wave focusing at
$\bar {\boldsymbol {v}}$, oscillation remains, but most of the scattering vanishes, as illustrated by figure 7. Moreover, the curvature of the jet creates artificial wave focusing at  $t=8$ and
$t=8$ and  $10$ days. Introducing a time-uncorrelated model (3.11) corrects the resolution issue in figure 8. Figure 9 plots the current ADSD. The current is strong (
$10$ days. Introducing a time-uncorrelated model (3.11) corrects the resolution issue in figure 8. Figure 9 plots the current ADSD. The current is strong ( $\|\boldsymbol {v}\|\approx 1.4$ m s
$\|\boldsymbol {v}\|\approx 1.4$ m s $^{-1}$), and the usual fast wave approximation cannot be applied (
$^{-1}$), and the usual fast wave approximation cannot be applied ( ${\|\boldsymbol {v}\|}/{v_g^0 } \approx 1.2\times 10^{-1}$). However, the proposed modified fast wave model is valid, even at the very coarse
${\|\boldsymbol {v}\|}/{v_g^0 } \approx 1.2\times 10^{-1}$). However, the proposed modified fast wave model is valid, even at the very coarse  $4\times 4$ resolution.
$4\times 4$ resolution.

Figure 7. Rays facing a low-resolution ( $4\times 4$) deterministic 2-D Euler jet current – coloured by the corresponding wave amplitude
$4\times 4$) deterministic 2-D Euler jet current – coloured by the corresponding wave amplitude  $h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the current vorticity
$h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the current vorticity  $\omega = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \boldsymbol {v}$ (top colour bars).
$\omega = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \boldsymbol {v}$ (top colour bars).

Figure 8. Rays facing a low-resolution ( $4\times 4$) deterministic 2-D Euler jet current plus (one realization of) the time-uncorrelated stochastic model – coloured by the corresponding wave amplitude
$4\times 4$) deterministic 2-D Euler jet current plus (one realization of) the time-uncorrelated stochastic model – coloured by the corresponding wave amplitude  $h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the low-resolution current vorticity
$h(t)=\sqrt {\omega _0(k(t))\,N(t=0)}$ (right-hand side colour bars) – computed by forward advection and superimposed on the low-resolution current vorticity  $\bar {\omega } = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \bar {\boldsymbol {v}}$ (top colour bars).
$\bar {\omega } = \boldsymbol {\nabla }^{\bot } \boldsymbol {\cdot } \bar {\boldsymbol {v}}$ (top colour bars).

Figure 9. The ADSD (m $^2$ s
$^2$ s $^{-1}$/(rad m
$^{-1}$/(rad m $^{-1}$)) of the resolved high-resolution jet velocity in red, low-resolution jet velocity in blue, and modelled stochastic velocity in green. The theoretical spectrum slope
$^{-1}$)) of the resolved high-resolution jet velocity in red, low-resolution jet velocity in blue, and modelled stochastic velocity in green. The theoretical spectrum slope  $- 3$ (black solid line) is imposed, consistent with homogeneous 2-D Euler dynamics. The residual ADSD (green line) is set to extrapolate that power law at small scales.
$- 3$ (black solid line) is imposed, consistent with homogeneous 2-D Euler dynamics. The residual ADSD (green line) is set to extrapolate that power law at small scales.
Indeed, 2-D Euler spectra are steeper than for SQG dynamics, and the length scale ratio is already significant at this resolution,  ${l_{v'}}/{l_{v}} = 0.14$, and the derived time-decorrelation ratio is small:
${l_{v'}}/{l_{v}} = 0.14$, and the derived time-decorrelation ratio is small:  $\epsilon = ({l_{v'}}/{l_{v}}) ({\|\boldsymbol {v}\|}/{v_g^0}) = 1.6 \times 10^{-2}$.
$\epsilon = ({l_{v'}}/{l_{v}}) ({\|\boldsymbol {v}\|}/{v_g^0}) = 1.6 \times 10^{-2}$.
Furthermore, by approximating the under-resolved current  $\bar {v}$, an analytic stochastic solution can be obtained for a ray travelling against the current. The large-scale pattern of the jet takes a quadratic form
$\bar {v}$, an analytic stochastic solution can be obtained for a ray travelling against the current. The large-scale pattern of the jet takes a quadratic form
 \begin{equation} \bar{u} \approx \bar{U}_0 - \frac 12\,\bar{\beta} \left(y-\frac{L_y}{2}\right)^2 \quad \textrm{and} \quad \bar{v} \approx 0,\quad \textrm{with}\ \bar{U}_0,\bar{\beta} <0. \end{equation}
\begin{equation} \bar{u} \approx \bar{U}_0 - \frac 12\,\bar{\beta} \left(y-\frac{L_y}{2}\right)^2 \quad \textrm{and} \quad \bar{v} \approx 0,\quad \textrm{with}\ \bar{U}_0,\bar{\beta} <0. \end{equation}
Note that the toy model (5.3a,b) simply considers a straight jet, neglecting its curvature. For weak subgrid currents and a ray  $(x_r,y_r'+{L_y}/{2},k,\theta _k)$, propagating mainly to the right,
$(x_r,y_r'+{L_y}/{2},k,\theta _k)$, propagating mainly to the right,  $\theta _k$ is small and the simplified ray equation (4.4) determines the group position with respect to the jet
$\theta _k$ is small and the simplified ray equation (4.4) determines the group position with respect to the jet  $y_r'$:
$y_r'$:
 \begin{equation} \frac{{\mathrm{d}} }{{\mathrm{d}} t} y_r'\approx v_g^0 \sin ( \theta_k) = v_g^0 \theta_k+ O(\theta_k^2). \end{equation}
\begin{equation} \frac{{\mathrm{d}} }{{\mathrm{d}} t} y_r'\approx v_g^0 \sin ( \theta_k) = v_g^0 \theta_k+ O(\theta_k^2). \end{equation}
For frozen turbulence, the wavenumber and hence  $v_g^0$ will not vary significantly. The other ray equation (4.3) localizes the group along the jet,
$v_g^0$ will not vary significantly. The other ray equation (4.3) localizes the group along the jet,  $x_r \approx x_r(0) + (v_g^0-\bar {u})t$, dropping the
$x_r \approx x_r(0) + (v_g^0-\bar {u})t$, dropping the  $O(\theta _k^2)$ from now on. Moreover,
$O(\theta _k^2)$ from now on. Moreover,  $\tilde {\boldsymbol {k}}^\bot \boldsymbol {\cdot } \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \tilde {\boldsymbol {k}} \approx -\partial _y \bar {u}$, and the dynamics of wavevector angle (4.6) simplifies to a stochastic oscillator equation:
$\tilde {\boldsymbol {k}}^\bot \boldsymbol {\cdot } \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \tilde {\boldsymbol {k}} \approx -\partial _y \bar {u}$, and the dynamics of wavevector angle (4.6) simplifies to a stochastic oscillator equation:
 \begin{equation} \frac{{\mathrm{d}}^2 }{{\mathrm{d}} t^2} y_r'= v_g^0\, \frac{{\mathrm{d}} }{{\mathrm{d}} t} {\theta}_{k}=s-\partial_y (v_g^0 \bar{u}) + v_g^0 \sqrt{3 \gamma_0}\,\dot{B}_t^{(4)}={-} \bar{\omega}_r^2 y_r'+ v_g^0 \sqrt{3 \gamma_0}\,\dot{B}_t^{(4)}, \end{equation}
\begin{equation} \frac{{\mathrm{d}}^2 }{{\mathrm{d}} t^2} y_r'= v_g^0\, \frac{{\mathrm{d}} }{{\mathrm{d}} t} {\theta}_{k}=s-\partial_y (v_g^0 \bar{u}) + v_g^0 \sqrt{3 \gamma_0}\,\dot{B}_t^{(4)}={-} \bar{\omega}_r^2 y_r'+ v_g^0 \sqrt{3 \gamma_0}\,\dot{B}_t^{(4)}, \end{equation}
with  $\bar {\omega }_r = \sqrt {|v_g^0 \bar {\beta }|}$. Here,
$\bar {\omega }_r = \sqrt {|v_g^0 \bar {\beta }|}$. Here,  $v_g^0 \bar {u}$ plays the role of a potential, trapping the rays in the jet vicinity, whereas the noise accounts for wave scattering. The solution of this linear equation is known (e.g. Resseguier et al. (Reference Resseguier, Mémin and Chapron2017a), (51)–(55)):
$v_g^0 \bar {u}$ plays the role of a potential, trapping the rays in the jet vicinity, whereas the noise accounts for wave scattering. The solution of this linear equation is known (e.g. Resseguier et al. (Reference Resseguier, Mémin and Chapron2017a), (51)–(55)):
 \begin{align} y_r (t) = \underbrace{\frac{L_y}{2} + y_r'(0) \cos(\bar{\omega}_rt) + \frac{v_g^0}{\bar{\omega}_r}\,\theta_k(0)\sin(\bar{\omega}_rt)}_{=\,\mathbb{E} (y_r(t) )} +\underbrace{Y_{\gamma_0} \sqrt{ \bar{\omega}_r} \int_{0}^t \sin(\bar{\omega}_r(t-r))\, {\mathrm{d}} B_r^{(4)}}_{=\,y_r''(t)}, \end{align}
\begin{align} y_r (t) = \underbrace{\frac{L_y}{2} + y_r'(0) \cos(\bar{\omega}_rt) + \frac{v_g^0}{\bar{\omega}_r}\,\theta_k(0)\sin(\bar{\omega}_rt)}_{=\,\mathbb{E} (y_r(t) )} +\underbrace{Y_{\gamma_0} \sqrt{ \bar{\omega}_r} \int_{0}^t \sin(\bar{\omega}_r(t-r))\, {\mathrm{d}} B_r^{(4)}}_{=\,y_r''(t)}, \end{align}
with  $Y_{\gamma _0} = v_g^0\sqrt {{ 3 \gamma _0}/{\bar {\omega }_r^3} }$. The wavevector angle solution is similar. The solution ensemble mean
$Y_{\gamma _0} = v_g^0\sqrt {{ 3 \gamma _0}/{\bar {\omega }_r^3} }$. The wavevector angle solution is similar. The solution ensemble mean  $\mathbb {E} y_r$ is a simple coherent deterministic oscillator. This mean solution describes well the interaction between the group and the under-resolved current from figure 7. From the coarse-scale vorticity shear plotted in figure 10 in the vicinity of the jet, we can estimate
$\mathbb {E} y_r$ is a simple coherent deterministic oscillator. This mean solution describes well the interaction between the group and the under-resolved current from figure 7. From the coarse-scale vorticity shear plotted in figure 10 in the vicinity of the jet, we can estimate  $\bar {\beta } = - 2.7 \times 10^{-11}$ m
$\bar {\beta } = - 2.7 \times 10^{-11}$ m $^{-1}$ s
$^{-1}$ s $^{-1}$. It yields an oscillation frequency
$^{-1}$. It yields an oscillation frequency  $\bar {\omega }_r = 1.3 \times 10^{-5}$ rad s
$\bar {\omega }_r = 1.3 \times 10^{-5}$ rad s $^{-1}$, i.e. period
$^{-1}$, i.e. period  $2{\rm \pi} /\bar {\omega }_r = 5.7$ days, in agreement with the ray tracing simulations. Note that the high-resolution vorticity shear in figure 10(a) does not suggest any relevant values to explain the ray oscillations. Only the proposed multiscale current decomposition provides a quantitative explanation for these oscillations, and by extension for trapping rays inside the jet. Added to the mean solution, the random parts
$2{\rm \pi} /\bar {\omega }_r = 5.7$ days, in agreement with the ray tracing simulations. Note that the high-resolution vorticity shear in figure 10(a) does not suggest any relevant values to explain the ray oscillations. Only the proposed multiscale current decomposition provides a quantitative explanation for these oscillations, and by extension for trapping rays inside the jet. Added to the mean solution, the random parts  $y_r''(t)$ are continuous summations of zero-mean incoherent wave fluctuations. At each time
$y_r''(t)$ are continuous summations of zero-mean incoherent wave fluctuations. At each time  $r$, the additive random forcing introduces an oscillation. But the influence of the past excitations is weighed by a sine wave due to the phase change. The group position and wavevector angle are Gaussian random variables (as linear combinations of independent Gaussian variables). Therefore, their finite-dimensional law (i.e. the multi-time probability density function) is entirely defined by their mean and covariance functions. Specifically,
$r$, the additive random forcing introduces an oscillation. But the influence of the past excitations is weighed by a sine wave due to the phase change. The group position and wavevector angle are Gaussian random variables (as linear combinations of independent Gaussian variables). Therefore, their finite-dimensional law (i.e. the multi-time probability density function) is entirely defined by their mean and covariance functions. Specifically,
 \begin{align} \mathbb{E} (y_r''(t)\,y_r''(t+\tau))=\tfrac{1}{4} Y_{\gamma_0}^2 (\cos(\bar{\omega}_r \tau )\,(2 \bar{\omega}_r t - \sin( 2 \bar{\omega}_r t)) +\sin(\bar{\omega}_r \tau )\,(1 - \cos( 2 \bar{\omega}_r t))). \end{align}
\begin{align} \mathbb{E} (y_r''(t)\,y_r''(t+\tau))=\tfrac{1}{4} Y_{\gamma_0}^2 (\cos(\bar{\omega}_r \tau )\,(2 \bar{\omega}_r t - \sin( 2 \bar{\omega}_r t)) +\sin(\bar{\omega}_r \tau )\,(1 - \cos( 2 \bar{\omega}_r t))). \end{align}
In particular, the variance of the vertical positions reads  $\sigma _y^2 (t) =\frac {1}{4} Y_{\gamma _0}^2 (2 \bar {\omega }_r t - \sin ( 2 \bar {\omega }_r t))$. At
$\sigma _y^2 (t) =\frac {1}{4} Y_{\gamma _0}^2 (2 \bar {\omega }_r t - \sin ( 2 \bar {\omega }_r t))$. At  $t= 2{\rm \pi} / \bar {\omega }_r$, the group has oscillated once around the jet, and the maximal position extension reaches
$t= 2{\rm \pi} / \bar {\omega }_r$, the group has oscillated once around the jet, and the maximal position extension reaches  $\pm 2\sigma _y = \pm 2\sqrt {{\rm \pi} }\,Y_{\gamma _0} = \pm 42$ km, well confirmed by ray simulations. In contrast, usual fast wave models (e.g. Smit & Janssen Reference Smit and Janssen2019) do not consider the interplay between smooth and rough currents, and hence solely predict a classical scattering with a much faster vertical location spreading:
$\pm 2\sigma _y = \pm 2\sqrt {{\rm \pi} }\,Y_{\gamma _0} = \pm 42$ km, well confirmed by ray simulations. In contrast, usual fast wave models (e.g. Smit & Janssen Reference Smit and Janssen2019) do not consider the interplay between smooth and rough currents, and hence solely predict a classical scattering with a much faster vertical location spreading:  $\pm 2 \sigma _y = \pm 2 \sqrt {(2 {\rm \pi})^3/3}\,Y_{\gamma _0} = \pm 217$ km. For large time, our multiscale approach predicts a scaling in
$\pm 2 \sigma _y = \pm 2 \sqrt {(2 {\rm \pi})^3/3}\,Y_{\gamma _0} = \pm 217$ km. For large time, our multiscale approach predicts a scaling in  $t$, much slower than the usual scattering
$t$, much slower than the usual scattering  $t^3$ scaling.
$t^3$ scaling.

Figure 10. Vorticity shear  $\partial ^2_y u$ of the deterministic 2-D Euler jet current at (a) high-resolution (
$\partial ^2_y u$ of the deterministic 2-D Euler jet current at (a) high-resolution ( $512\times 512$) and (b) low-resolution (
$512\times 512$) and (b) low-resolution ( $4\times 4$), and (c) the corresponding swell system period
$4\times 4$), and (c) the corresponding swell system period  $2{\rm \pi} /\bar {\omega }_r$. Far from the jet (
$2{\rm \pi} /\bar {\omega }_r$. Far from the jet ( ${\pm }200$ km away), the vorticity shear becomes zero or even positive, so periods larger than
${\pm }200$ km away), the vorticity shear becomes zero or even positive, so periods larger than  $10$ days are cropped.
$10$ days are cropped.
From the group vertical location and wavevector angle, we can also solve (4.5) analytically to estimate the group wavenumber variations. For small wavevector angles,  $-\int _0^t \bar {\sigma } \sin (\zeta ) \,{\rm d} t' \approx 2\int _0^t \bar {\omega } \theta _k \,{\rm d} t' = 2 \bar {\beta }\int _0^t y_r'\theta _k \,{\rm d} t'$, and (4.9) together with the analytic solutions for
$-\int _0^t \bar {\sigma } \sin (\zeta ) \,{\rm d} t' \approx 2\int _0^t \bar {\omega } \theta _k \,{\rm d} t' = 2 \bar {\beta }\int _0^t y_r'\theta _k \,{\rm d} t'$, and (4.9) together with the analytic solutions for  $y_r'$ and
$y_r'$ and  $\theta _k$ give a closed stochastic expression for the group wavenumber. Thus the wavenumber factor
$\theta _k$ give a closed stochastic expression for the group wavenumber. Thus the wavenumber factor  $\exp (2 \bar {\beta }\int _0^t y_r'\theta _k \,{\rm d} t')$ oscillates at frequency
$\exp (2 \bar {\beta }\int _0^t y_r'\theta _k \,{\rm d} t')$ oscillates at frequency  $2\bar {\omega }_r$, and the oscillations modulate the wave amplitude:
$2\bar {\omega }_r$, and the oscillations modulate the wave amplitude:  $h=\sqrt {E}=\sqrt {\omega _0 N} = \mathrm {constant}\times k^{1/4}$. The modulations are associated with wave–current energy exchanges (Boury et al. Reference Boury, Bühler and Shatah2023), visible in the coloured rays of figures 6, 7 and 8 when the groups enter and exit the jet.
$h=\sqrt {E}=\sqrt {\omega _0 N} = \mathrm {constant}\times k^{1/4}$. The modulations are associated with wave–current energy exchanges (Boury et al. Reference Boury, Bühler and Shatah2023), visible in the coloured rays of figures 6, 7 and 8 when the groups enter and exit the jet.
Finally, the conditional ray distribution  $p(\boldsymbol {x},\boldsymbol {k} \,|\, \boldsymbol {x}_r^0,\boldsymbol {k}^0,t)$, the action spectrum mean from (4.10) and the action mean from (4.11) can all be derived. For a system initially localized in
$p(\boldsymbol {x},\boldsymbol {k} \,|\, \boldsymbol {x}_r^0,\boldsymbol {k}^0,t)$, the action spectrum mean from (4.10) and the action mean from (4.11) can all be derived. For a system initially localized in  $(0,{L_y}/{2})$ with action
$(0,{L_y}/{2})$ with action  $A^0$, wavenumber
$A^0$, wavenumber  $k^0$ and a
$k^0$ and a  $\sigma _{\delta \theta _k}^0$-width Gaussian angular spreading, propagating to the right, the action mean reads
$\sigma _{\delta \theta _k}^0$-width Gaussian angular spreading, propagating to the right, the action mean reads
 \begin{equation} \mathbb{E} A(x,y,t)= A^0\delta(x - (v_g^0(k^0)-\bar{u}(y))t)\, \mathcal{N}\left(y-\left.\frac{L_y}{2}\right|\tilde{\sigma}_y^2(t)\right), \end{equation}
\begin{equation} \mathbb{E} A(x,y,t)= A^0\delta(x - (v_g^0(k^0)-\bar{u}(y))t)\, \mathcal{N}\left(y-\left.\frac{L_y}{2}\right|\tilde{\sigma}_y^2(t)\right), \end{equation}
with  $\mathcal {N} (\cdot \,|\, \tilde {\sigma }_y^2(t))$ a Gaussian function with variance
$\mathcal {N} (\cdot \,|\, \tilde {\sigma }_y^2(t))$ a Gaussian function with variance  $\tilde {\sigma }_y^2(t) = \sigma _y^2(t) + (({v_g^0}/{\bar {\omega }_r}) \sin (\bar {\omega }_r t) \sigma _{\delta \theta _k}^0)^2$. The action is advected in the horizontal direction, and slowly diffuses along the vertical direction.
$\tilde {\sigma }_y^2(t) = \sigma _y^2(t) + (({v_g^0}/{\bar {\omega }_r}) \sin (\bar {\omega }_r t) \sigma _{\delta \theta _k}^0)^2$. The action is advected in the horizontal direction, and slowly diffuses along the vertical direction.
6. Conclusion
Developed to generalize the ray path concept for waves propagating over a heterogeneous turbulence, a practical stochastic framework is derived. For fast waves, the smallest scales of a turbulent flow decorrelate along the wave propagation. Flows with steeper spectra decorrelate faster, leading to a broader validity range of fast wave approximations. The proposed framework encodes both large-scale refraction and random scattering effects on wave statistical properties. The mean wave action statistics are directly linked to resolved strain rate and vorticity, but also to unresolved kinetic energy spectral properties. Both Eulerian and Lagrangian views are presented. A convenient calibration method is also proposed for the subgrid parametrization.
As anticipated, random horizontal currents delay wave arrival and augment the initial radiative transport equation with a directional diffusive term. These phenomena are illustrated with numerical simulations, analytical solutions and quantitative proxies describing weak homogeneous turbulence. Using these proxies, measured delays in ray arrivals, estimated wave energy spectral characteristics and decays, and/or varying directional spread, will then be more quantitatively interpreted. It will lead to valuable information about underlying flow properties.
The generalized fast wave approximation does takes into account wavenumber variation and handles strong heterogeneous flows, like localized jets with strong current gradients. As compared to numerical simulations, numerical and theoretical results explain and quantify ray trapping effects by jets, unlike usual fast wave approaches.
Among the fast wave literature, isotropic diffusion and hence wavenumber diffusion may (e.g. Voronovich Reference Voronovich1991) or may not (e.g. Bôas & Young Reference Bôas and Young2020) come into play (see Appendix C for details). Future works could adapt our convenient stochastic calculus framework to the second models family. Besides, further analytical developments could consider finite-size wave groups, their dynamics (Jonsson Reference Jonsson1990; White & Fornberg Reference White and Fornberg1998) and statistical distributions, or alternatively the Eulerian action dynamics (4.12) with all its multi-point stochastic structure. When achieved, this next theoretical development could provide new means to analyse wave dynamics with subsequent fast simulations of ensembles. Beside comprehension and analysis, our stochastic simulation tools aim to eventually facilitate future ensemble-based data assimilation algorithms (Smit et al. Reference Smit, Houghton, Jordanova, Portwood, Shapiro, Clark, Sosa and Janssen2021).
Funding
This work is supported by the R&T CNES R-S19/OT-0003-084, the ERC project 856408-STUOD, the European Space Agency World Ocean Current project (ESA contract no. 4000130730/20/I-NB), and SCALIAN DS.
Declaration of interests
The authors report no conflict of interest.
Data availability statement
SCALIAN DS owns a portion of the developed code intellectual property. For commercial reasons, that code will remain private.
Author contributions
V.R. developed the theory. V.R. and E.H. wrote the code and performed numerical experiments. V.R. and B.C. wrote the paper.
Appendix A. Stochastic forcing covariance
In this Appendix, we will compute the conditional covariance of the stochastic forcing of our eikonal characteristic equations (4.1), i.e.
 \begin{equation} 2
\boldsymbol{\mathsf{D}} \stackrel{\triangle}{=}\frac 1
{{\mathrm{d}} t} \mathbb{E}_t\left\{\begin{pmatrix}
\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t \\
{\mathrm{d}}{\boldsymbol{\eta}}_t \end{pmatrix}
\begin{pmatrix} \boldsymbol{\sigma} \,{{\mathrm{d}}} B_t \\
{\mathrm{d}}{\boldsymbol{\eta}}_t
\end{pmatrix}^{{\rm T}}\right\}
=\begin{bmatrix} \boldsymbol{\mathsf{a}} &
\boldsymbol{\varSigma}_{\eta,\sigma } \\
\boldsymbol{\varSigma}_{\eta,\sigma }^{{\rm T}} & \boldsymbol{\varSigma}_{\eta }
\end{bmatrix},
\end{equation}
\begin{equation} 2
\boldsymbol{\mathsf{D}} \stackrel{\triangle}{=}\frac 1
{{\mathrm{d}} t} \mathbb{E}_t\left\{\begin{pmatrix}
\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t \\
{\mathrm{d}}{\boldsymbol{\eta}}_t \end{pmatrix}
\begin{pmatrix} \boldsymbol{\sigma} \,{{\mathrm{d}}} B_t \\
{\mathrm{d}}{\boldsymbol{\eta}}_t
\end{pmatrix}^{{\rm T}}\right\}
=\begin{bmatrix} \boldsymbol{\mathsf{a}} &
\boldsymbol{\varSigma}_{\eta,\sigma } \\
\boldsymbol{\varSigma}_{\eta,\sigma }^{{\rm T}} & \boldsymbol{\varSigma}_{\eta }
\end{bmatrix},
\end{equation}
where  ${\rm d} {\boldsymbol {\eta }}_t = - {\boldsymbol {\nabla } (\boldsymbol {\sigma } \,{\mathrm {d}} B_t)^{{\rm T}} } \boldsymbol {k}$ denotes the wavevector stochastic forcing,
${\rm d} {\boldsymbol {\eta }}_t = - {\boldsymbol {\nabla } (\boldsymbol {\sigma } \,{\mathrm {d}} B_t)^{{\rm T}} } \boldsymbol {k}$ denotes the wavevector stochastic forcing,  $\boldsymbol {\varSigma }_{\eta } \,{\mathrm {d}} t$ is its covariance, and
$\boldsymbol {\varSigma }_{\eta } \,{\mathrm {d}} t$ is its covariance, and  $\mathbb {E}_t \{\cdot \} \stackrel {\triangle }{=} \mathbb {E} \{\cdot \, |\, \boldsymbol {x}_r(t), \boldsymbol {k}(t) \}$ stands for the conditional expectation evaluated with given characteristics
$\mathbb {E}_t \{\cdot \} \stackrel {\triangle }{=} \mathbb {E} \{\cdot \, |\, \boldsymbol {x}_r(t), \boldsymbol {k}(t) \}$ stands for the conditional expectation evaluated with given characteristics  $(\boldsymbol {x}_r(t), \boldsymbol {k}(t))$ at the current time
$(\boldsymbol {x}_r(t), \boldsymbol {k}(t))$ at the current time  $t$. Note that in this Appendix we use Itō notations only.
$t$. Note that in this Appendix we use Itō notations only.
The subgrid velocity  $\boldsymbol {v}'= \boldsymbol {\sigma } \,{{\mathrm {d}}} B_t/{\mathrm {d}} t$ is constructed in Fourier space with a divergence-free isotropic spatial filter
$\boldsymbol {v}'= \boldsymbol {\sigma } \,{{\mathrm {d}}} B_t/{\mathrm {d}} t$ is constructed in Fourier space with a divergence-free isotropic spatial filter  $\boldsymbol {\nabla }^{\bot } \breve {\psi }_{\sigma }$ (see (3.11)):
$\boldsymbol {\nabla }^{\bot } \breve {\psi }_{\sigma }$ (see (3.11)):
 \begin{equation} \widehat{\boldsymbol{v}'} (\boldsymbol{\kappa},t)= \int {\mathrm{d}} \boldsymbol{x}\,{\boldsymbol{v}'}(\boldsymbol{x},t) \exp({-\mathrm{i} \boldsymbol{\kappa} \boldsymbol{\cdot} \boldsymbol{x}})= \widehat{\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t}/{\mathrm{d}} t(\boldsymbol{\kappa},t)= \mathrm{i} \boldsymbol{\kappa}^{\bot} \hat{\breve{\psi}}_{\sigma}(\kappa) \,\widehat{{{\mathrm{d}}} B_t}(\boldsymbol{\kappa})/{\mathrm{d}} t, \end{equation}
\begin{equation} \widehat{\boldsymbol{v}'} (\boldsymbol{\kappa},t)= \int {\mathrm{d}} \boldsymbol{x}\,{\boldsymbol{v}'}(\boldsymbol{x},t) \exp({-\mathrm{i} \boldsymbol{\kappa} \boldsymbol{\cdot} \boldsymbol{x}})= \widehat{\boldsymbol{\sigma} \,{{\mathrm{d}}} B_t}/{\mathrm{d}} t(\boldsymbol{\kappa},t)= \mathrm{i} \boldsymbol{\kappa}^{\bot} \hat{\breve{\psi}}_{\sigma}(\kappa) \,\widehat{{{\mathrm{d}}} B_t}(\boldsymbol{\kappa})/{\mathrm{d}} t, \end{equation}
where  $\kappa ^\bot$ is the vector directly orthogonal to
$\kappa ^\bot$ is the vector directly orthogonal to  $\kappa$. The computation of the variance tensor
$\kappa$. The computation of the variance tensor  $\boldsymbol{\mathsf{a}}$ is classical and straightforward from the definition of the inverse Fourier transform and the identity
$\boldsymbol{\mathsf{a}}$ is classical and straightforward from the definition of the inverse Fourier transform and the identity  $\mathbb {E} \{\widehat {{{\mathrm {d}}} B_t}(\boldsymbol {\kappa }_1)\,{\widehat {{{\mathrm {d}}} B_t}}^* (\boldsymbol {\kappa }_2)\} = (2{\rm \pi} )^2\delta (\kappa _1-\kappa _2) \,{\mathrm {d}} t$, where
$\mathbb {E} \{\widehat {{{\mathrm {d}}} B_t}(\boldsymbol {\kappa }_1)\,{\widehat {{{\mathrm {d}}} B_t}}^* (\boldsymbol {\kappa }_2)\} = (2{\rm \pi} )^2\delta (\kappa _1-\kappa _2) \,{\mathrm {d}} t$, where  $^*$ denotes complex conjugate. We simply need to split the integral of the stochastic forcing spectrum over the current wavevector
$^*$ denotes complex conjugate. We simply need to split the integral of the stochastic forcing spectrum over the current wavevector  $\boldsymbol {\kappa }=\kappa (\cos \theta _\kappa,\sin \theta _\kappa )$:
$\boldsymbol {\kappa }=\kappa (\cos \theta _\kappa,\sin \theta _\kappa )$:
 \begin{align}
\boldsymbol{\mathsf{a}} &= \frac{1}{(2{\rm \pi})^4
\,{\mathrm{d}} t} \iint {\mathrm{d}} \boldsymbol{\kappa}_1
\,{\mathrm{d}}
\boldsymbol{\kappa}_2\,\mathbb{E}_t\left\{(\widehat{\boldsymbol{\sigma}
\,{{\mathrm{d}}} B_t})(\boldsymbol{\kappa}_1,
\boldsymbol{k})\, ( \widehat{\boldsymbol{\sigma}
\,{{\mathrm{d}}} B_t}^{{\rm T}}
)^*(\boldsymbol{\kappa}_2, \boldsymbol{k})\right\}
\exp({\mathrm{i}(\boldsymbol{\kappa}_1-\boldsymbol{\kappa}_2)\boldsymbol{\cdot}
\boldsymbol{x}})\nonumber \\
&= \frac{1}{(2{\rm \pi})^2}\int {\mathrm{d}} \boldsymbol{\kappa}\,\kappa^2\,| \hat{\breve{\psi}}_{\sigma}(\kappa) |^2 \begin{pmatrix} -\sin \theta_\kappa \\ \cos \theta_\kappa \end{pmatrix} \begin{pmatrix} -\sin \theta_\kappa \\ \cos \theta_\kappa \end{pmatrix} ^{{\rm T}}\nonumber\\
&= \frac{1}{(2{\rm \pi})^2} \int_0^{+\infty}\oint_0^{2{\rm \pi}} {\mathrm{d}} \kappa \,{\mathrm{d}} \theta_\kappa\, \kappa^3\,| \hat{\breve{\psi}}_{\sigma}(\kappa) |^2 \left[\begin{array}{@{}cc@{}l} \sin^2 \theta_\kappa & - \sin \theta_\kappa \cos \theta_\kappa \\ - \sin \theta_\kappa \cos \theta_\kappa & \cos^2 \theta_\kappa \end{array}\right]\nonumber\\
&= \frac{2}{2{\rm \pi}}\,a_0 \oint_0^{2{\rm \pi}} {\mathrm{d}} \theta_\kappa \left[\begin{array}{@{}cc@{}l} \sin^2 \theta_\kappa & - \sin \theta_\kappa \cos \theta_\kappa \\ - \sin \theta_\kappa \cos \theta_\kappa & \cos^2 \theta_\kappa \end{array}\right]\nonumber\\
&= a_0 \mathbb{I}_d,
\end{align}
\begin{align}
\boldsymbol{\mathsf{a}} &= \frac{1}{(2{\rm \pi})^4
\,{\mathrm{d}} t} \iint {\mathrm{d}} \boldsymbol{\kappa}_1
\,{\mathrm{d}}
\boldsymbol{\kappa}_2\,\mathbb{E}_t\left\{(\widehat{\boldsymbol{\sigma}
\,{{\mathrm{d}}} B_t})(\boldsymbol{\kappa}_1,
\boldsymbol{k})\, ( \widehat{\boldsymbol{\sigma}
\,{{\mathrm{d}}} B_t}^{{\rm T}}
)^*(\boldsymbol{\kappa}_2, \boldsymbol{k})\right\}
\exp({\mathrm{i}(\boldsymbol{\kappa}_1-\boldsymbol{\kappa}_2)\boldsymbol{\cdot}
\boldsymbol{x}})\nonumber \\
&= \frac{1}{(2{\rm \pi})^2}\int {\mathrm{d}} \boldsymbol{\kappa}\,\kappa^2\,| \hat{\breve{\psi}}_{\sigma}(\kappa) |^2 \begin{pmatrix} -\sin \theta_\kappa \\ \cos \theta_\kappa \end{pmatrix} \begin{pmatrix} -\sin \theta_\kappa \\ \cos \theta_\kappa \end{pmatrix} ^{{\rm T}}\nonumber\\
&= \frac{1}{(2{\rm \pi})^2} \int_0^{+\infty}\oint_0^{2{\rm \pi}} {\mathrm{d}} \kappa \,{\mathrm{d}} \theta_\kappa\, \kappa^3\,| \hat{\breve{\psi}}_{\sigma}(\kappa) |^2 \left[\begin{array}{@{}cc@{}l} \sin^2 \theta_\kappa & - \sin \theta_\kappa \cos \theta_\kappa \\ - \sin \theta_\kappa \cos \theta_\kappa & \cos^2 \theta_\kappa \end{array}\right]\nonumber\\
&= \frac{2}{2{\rm \pi}}\,a_0 \oint_0^{2{\rm \pi}} {\mathrm{d}} \theta_\kappa \left[\begin{array}{@{}cc@{}l} \sin^2 \theta_\kappa & - \sin \theta_\kappa \cos \theta_\kappa \\ - \sin \theta_\kappa \cos \theta_\kappa & \cos^2 \theta_\kappa \end{array}\right]\nonumber\\
&= a_0 \mathbb{I}_d,
\end{align}
where  $a_0$ is defined by (4.7).
$a_0$ is defined by (4.7).
Now, the Fourier transform of the wavevector stochastic forcing is
 \begin{align} {\mathrm{d}} \hat{\boldsymbol{\eta}}_t={-} \widehat{{\boldsymbol{\nabla} (\boldsymbol{\sigma} \,{\mathrm{d}} B_t)^{{\rm T}} }} \boldsymbol{k} ={-}\mathrm{i} \boldsymbol{\kappa}( \mathrm{i} \boldsymbol{\kappa}^{\bot} \hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t}) \boldsymbol{\cdot} \boldsymbol{k}=\boldsymbol{\kappa}(\boldsymbol{\kappa}^{\bot}\boldsymbol{\cdot} \boldsymbol{k}) \hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t} ={-}\boldsymbol{\kappa}(\boldsymbol{k}^{\bot}\boldsymbol{\cdot} \boldsymbol{\kappa})\hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t}. \end{align}
\begin{align} {\mathrm{d}} \hat{\boldsymbol{\eta}}_t={-} \widehat{{\boldsymbol{\nabla} (\boldsymbol{\sigma} \,{\mathrm{d}} B_t)^{{\rm T}} }} \boldsymbol{k} ={-}\mathrm{i} \boldsymbol{\kappa}( \mathrm{i} \boldsymbol{\kappa}^{\bot} \hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t}) \boldsymbol{\cdot} \boldsymbol{k}=\boldsymbol{\kappa}(\boldsymbol{\kappa}^{\bot}\boldsymbol{\cdot} \boldsymbol{k}) \hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t} ={-}\boldsymbol{\kappa}(\boldsymbol{k}^{\bot}\boldsymbol{\cdot} \boldsymbol{\kappa})\hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t}. \end{align}
Then applying the crest-oriented rotation matrix  $\boldsymbol {M}_k = \left [\begin{matrix} \tilde {\boldsymbol {k}} & \tilde {\boldsymbol {k}}^\bot \end{matrix}\right ]$ leads to
$\boldsymbol {M}_k = \left [\begin{matrix} \tilde {\boldsymbol {k}} & \tilde {\boldsymbol {k}}^\bot \end{matrix}\right ]$ leads to
 \begin{equation} {\mathrm{d}} \hat{\boldsymbol{Z}}_t=\boldsymbol{M}_k^{{\rm T}}\,{\mathrm{d}} \hat{\boldsymbol{\eta}}_t ={-} \begin{pmatrix} \tilde{\boldsymbol{k}}\boldsymbol{\cdot} \boldsymbol{\kappa} \\ \tilde{\boldsymbol{k}}^\bot \boldsymbol{\cdot} \boldsymbol{\kappa} \end{pmatrix}(\boldsymbol{k}^{\bot}\boldsymbol{\cdot} \boldsymbol{\kappa})\hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t} ={-}\begin{pmatrix} \cos \delta \theta \sin \delta \theta \\ \sin^2 \delta \theta \end{pmatrix}\kappa^2 k \hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t}, \end{equation}
\begin{equation} {\mathrm{d}} \hat{\boldsymbol{Z}}_t=\boldsymbol{M}_k^{{\rm T}}\,{\mathrm{d}} \hat{\boldsymbol{\eta}}_t ={-} \begin{pmatrix} \tilde{\boldsymbol{k}}\boldsymbol{\cdot} \boldsymbol{\kappa} \\ \tilde{\boldsymbol{k}}^\bot \boldsymbol{\cdot} \boldsymbol{\kappa} \end{pmatrix}(\boldsymbol{k}^{\bot}\boldsymbol{\cdot} \boldsymbol{\kappa})\hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t} ={-}\begin{pmatrix} \cos \delta \theta \sin \delta \theta \\ \sin^2 \delta \theta \end{pmatrix}\kappa^2 k \hat{\breve{\psi}}_{\sigma} \,\widehat{{{\mathrm{d}}} B_t}, \end{equation}
with  $\delta \theta = \theta _\kappa - \theta _k$. From there, we can evaluate the conditional covariance matrix
$\delta \theta = \theta _\kappa - \theta _k$. From there, we can evaluate the conditional covariance matrix  $\boldsymbol {\varSigma }_{Z} = (1/{{\mathrm {d}} t})\,\mathbb {E}_t \{{\mathrm {d}} {\boldsymbol {Z}}_t \,{\mathrm {d}} {\boldsymbol {Z}}_t^{{\rm T}}\}$ of
$\boldsymbol {\varSigma }_{Z} = (1/{{\mathrm {d}} t})\,\mathbb {E}_t \{{\mathrm {d}} {\boldsymbol {Z}}_t \,{\mathrm {d}} {\boldsymbol {Z}}_t^{{\rm T}}\}$ of  ${\mathrm {d}} \boldsymbol {Z}_t$ as before:
${\mathrm {d}} \boldsymbol {Z}_t$ as before:
 \begin{align} \boldsymbol{\varSigma}_{Z}
&= \frac{1}{(2{\rm \pi})^4 \,{\mathrm{d}} t} \iint {\mathrm{d}}
\boldsymbol{\kappa}_1 \,{\mathrm{d}}
\boldsymbol{\kappa}_2\,\mathbb{E}_t \{({\mathrm{d}}
\hat{\boldsymbol{Z}}_t )
(\boldsymbol{\kappa}_1, \boldsymbol{k} )\, ({ {\mathrm{d}}
\hat{\boldsymbol{Z}}_t^{{\rm T}} })^* (\boldsymbol{\kappa}_2, \boldsymbol{k} )\}
\exp({\mathrm{i}(\boldsymbol{\kappa}_1-\boldsymbol{\kappa}_2)\boldsymbol{\cdot}
\boldsymbol{x}}) \nonumber\\
&= \frac{1}{(2{\rm \pi})^2} \int_0^{+\infty}\oint_0^{2{\rm \pi}} {\mathrm{d}} \kappa \,{\mathrm{d}} \delta \theta\, \kappa^5 k^2\,| \hat{\breve{\psi}}_{\sigma}(\kappa) |^2 \left[\begin{array}{@{}cc@{}l} \cos^2 \delta \theta \sin^2 \delta \theta & \cos \delta \theta \sin^3 \delta \theta \\ \cos \delta \theta \sin^3 \delta \theta & \sin^4 \delta \theta \end{array}\right]\nonumber\\
&=\gamma_0 k^2 \begin{bmatrix} 1 & 0 \\ 0 & 3 \end{bmatrix}.
\end{align}
\begin{align} \boldsymbol{\varSigma}_{Z}
&= \frac{1}{(2{\rm \pi})^4 \,{\mathrm{d}} t} \iint {\mathrm{d}}
\boldsymbol{\kappa}_1 \,{\mathrm{d}}
\boldsymbol{\kappa}_2\,\mathbb{E}_t \{({\mathrm{d}}
\hat{\boldsymbol{Z}}_t )
(\boldsymbol{\kappa}_1, \boldsymbol{k} )\, ({ {\mathrm{d}}
\hat{\boldsymbol{Z}}_t^{{\rm T}} })^* (\boldsymbol{\kappa}_2, \boldsymbol{k} )\}
\exp({\mathrm{i}(\boldsymbol{\kappa}_1-\boldsymbol{\kappa}_2)\boldsymbol{\cdot}
\boldsymbol{x}}) \nonumber\\
&= \frac{1}{(2{\rm \pi})^2} \int_0^{+\infty}\oint_0^{2{\rm \pi}} {\mathrm{d}} \kappa \,{\mathrm{d}} \delta \theta\, \kappa^5 k^2\,| \hat{\breve{\psi}}_{\sigma}(\kappa) |^2 \left[\begin{array}{@{}cc@{}l} \cos^2 \delta \theta \sin^2 \delta \theta & \cos \delta \theta \sin^3 \delta \theta \\ \cos \delta \theta \sin^3 \delta \theta & \sin^4 \delta \theta \end{array}\right]\nonumber\\
&=\gamma_0 k^2 \begin{bmatrix} 1 & 0 \\ 0 & 3 \end{bmatrix}.
\end{align}Finally, we come back to the canonical frame to get
 \begin{equation}
\boldsymbol{\varSigma}_{\eta}=\mathbb{E}_t \{{\mathrm{d}}
{\boldsymbol{\eta}}_t \,{\mathrm{d}}
{\boldsymbol{\eta}}_t^{{\rm T}}\}= \boldsymbol{M}_k
\boldsymbol{\varSigma}_{Z} \boldsymbol{M}_k^{{\rm T}} =\gamma_0
k^2[\tilde{\boldsymbol{k}}
\tilde{\boldsymbol{k}}^{{\rm T}} + 3
\tilde{\boldsymbol{k}}^\bot
(\tilde{\boldsymbol{k}}^\bot)^{{\rm
T}}].\end{equation}
\begin{equation}
\boldsymbol{\varSigma}_{\eta}=\mathbb{E}_t \{{\mathrm{d}}
{\boldsymbol{\eta}}_t \,{\mathrm{d}}
{\boldsymbol{\eta}}_t^{{\rm T}}\}= \boldsymbol{M}_k
\boldsymbol{\varSigma}_{Z} \boldsymbol{M}_k^{{\rm T}} =\gamma_0
k^2[\tilde{\boldsymbol{k}}
\tilde{\boldsymbol{k}}^{{\rm T}} + 3
\tilde{\boldsymbol{k}}^\bot
(\tilde{\boldsymbol{k}}^\bot)^{{\rm
T}}].\end{equation}For noises cross-correlations, by isotropy, it is also straightforward to show that
 \begin{equation} \boldsymbol{\varSigma}_{\eta,\sigma }=0. \end{equation}
\begin{equation} \boldsymbol{\varSigma}_{\eta,\sigma }=0. \end{equation}
The stochastic forcings of  $\boldsymbol {x}_r$ and
$\boldsymbol {x}_r$ and  $\boldsymbol {k}$ are hence (conditionally) independent from one another.
$\boldsymbol {k}$ are hence (conditionally) independent from one another.
Appendix B. Single-ray dynamics
The Itō noise  $\left (\begin{smallmatrix} \boldsymbol {\sigma } \,{{\mathrm {d}}} B_t \\ {\mathrm {d}}{\boldsymbol {\eta }}_t \end{smallmatrix}\right )$ is white in time and conditionally Gaussian. Its conditional single-point distribution is fully determined by its zero mean and its local covariance matrix (given by (A1), (A3), (A7) and (A8)). In particular, we can replace this noise by another zero-mean Gaussian vector with the same covariance without changing the single-ray dynamics – typically replacing
$\left (\begin{smallmatrix} \boldsymbol {\sigma } \,{{\mathrm {d}}} B_t \\ {\mathrm {d}}{\boldsymbol {\eta }}_t \end{smallmatrix}\right )$ is white in time and conditionally Gaussian. Its conditional single-point distribution is fully determined by its zero mean and its local covariance matrix (given by (A1), (A3), (A7) and (A8)). In particular, we can replace this noise by another zero-mean Gaussian vector with the same covariance without changing the single-ray dynamics – typically replacing  $\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t$ by
$\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t$ by  $\sqrt {a_0} \left (\begin{smallmatrix} {\mathrm {d}} B_t^{(1)} \\ {\mathrm {d}} B_t^{(2)} \end{smallmatrix}\right )$, and
$\sqrt {a_0} \left (\begin{smallmatrix} {\mathrm {d}} B_t^{(1)} \\ {\mathrm {d}} B_t^{(2)} \end{smallmatrix}\right )$, and  ${\mathrm {d}} {\boldsymbol {Z}}_t$ by
${\mathrm {d}} {\boldsymbol {Z}}_t$ by  $-\sqrt {\gamma _0}k \left (\!\begin{smallmatrix} {\mathrm {d}} B_t^{(3)} \\ \sqrt {3}\,{\mathrm {d}} B_t^{(4)} \end{smallmatrix}\!\right )$. This yields the simplified ray equations (4.3)–(4.4).
$-\sqrt {\gamma _0}k \left (\!\begin{smallmatrix} {\mathrm {d}} B_t^{(3)} \\ \sqrt {3}\,{\mathrm {d}} B_t^{(4)} \end{smallmatrix}\!\right )$. This yields the simplified ray equations (4.3)–(4.4).
Then note that from the Itō lemma (Oksendal Reference Oksendal1998),  ${\mathrm {d}} \tilde {\boldsymbol {k}} = {\mathrm {d}} \left (\begin{smallmatrix} \cos \theta _k \\ \sin \theta _k \end{smallmatrix}\right )= \tilde {\boldsymbol {k}}^\bot \,{\mathrm {d}} \theta _k - \frac 12 \tilde {\boldsymbol {k}} \,{\mathrm {d}}\langle \theta _k,\theta _k\rangle _t$, where
${\mathrm {d}} \tilde {\boldsymbol {k}} = {\mathrm {d}} \left (\begin{smallmatrix} \cos \theta _k \\ \sin \theta _k \end{smallmatrix}\right )= \tilde {\boldsymbol {k}}^\bot \,{\mathrm {d}} \theta _k - \frac 12 \tilde {\boldsymbol {k}} \,{\mathrm {d}}\langle \theta _k,\theta _k\rangle _t$, where  $\langle \cdot,\cdot \rangle _t$ denotes the quadratic covariation. Thus
$\langle \cdot,\cdot \rangle _t$ denotes the quadratic covariation. Thus
 \begin{equation} {\mathrm{d}} \boldsymbol{k}={\mathrm{d}} k\,\tilde{\boldsymbol{k}} + k \,{\mathrm{d}} \tilde{\boldsymbol{k}} + {\mathrm{d}}\langle k,\tilde{\boldsymbol{k}}\rangle= ({\mathrm{d}} k - \tfrac 12 k\,{\mathrm{d}}\langle\theta_k,\theta_k\rangle_t)\,\tilde{\boldsymbol{k}} +(k\,{\mathrm{d}} \theta_k + {\mathrm{d}}\langle k,\theta_k\rangle_t) \tilde{\boldsymbol{k}}^{\bot}. \end{equation}
\begin{equation} {\mathrm{d}} \boldsymbol{k}={\mathrm{d}} k\,\tilde{\boldsymbol{k}} + k \,{\mathrm{d}} \tilde{\boldsymbol{k}} + {\mathrm{d}}\langle k,\tilde{\boldsymbol{k}}\rangle= ({\mathrm{d}} k - \tfrac 12 k\,{\mathrm{d}}\langle\theta_k,\theta_k\rangle_t)\,\tilde{\boldsymbol{k}} +(k\,{\mathrm{d}} \theta_k + {\mathrm{d}}\langle k,\theta_k\rangle_t) \tilde{\boldsymbol{k}}^{\bot}. \end{equation}
Projecting this equation and  ${\mathrm {d}} \boldsymbol {k}=- \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \boldsymbol {k} \,{\mathrm {d}} t+ {\mathrm {d}} \boldsymbol {\eta }_t$ on
${\mathrm {d}} \boldsymbol {k}=- \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \boldsymbol {k} \,{\mathrm {d}} t+ {\mathrm {d}} \boldsymbol {\eta }_t$ on  $\tilde {\boldsymbol {k}}$ and
$\tilde {\boldsymbol {k}}$ and  $\tilde {\boldsymbol {k}}^\bot$, we have
$\tilde {\boldsymbol {k}}^\bot$, we have
 \begin{align} & \begin{cases} {\mathrm{d}} k ={-} \tilde{\boldsymbol{k}}\boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \boldsymbol{k} \,{\mathrm{d}} t + ({\mathrm{d}} Z_t)_1 + \frac 12 k \,{\mathrm{d}}\langle \theta_k,\theta_k\rangle_t,\\ k \,{\mathrm{d}} \theta_k ={-} \tilde{\boldsymbol{k}}^\bot \boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \boldsymbol{k} \,{\mathrm{d}} t + ({\mathrm{d}} Z_t)_2 - {\mathrm{d}}\langle k,\theta_k\rangle_t, \end{cases} \end{align}
\begin{align} & \begin{cases} {\mathrm{d}} k ={-} \tilde{\boldsymbol{k}}\boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \boldsymbol{k} \,{\mathrm{d}} t + ({\mathrm{d}} Z_t)_1 + \frac 12 k \,{\mathrm{d}}\langle \theta_k,\theta_k\rangle_t,\\ k \,{\mathrm{d}} \theta_k ={-} \tilde{\boldsymbol{k}}^\bot \boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \boldsymbol{k} \,{\mathrm{d}} t + ({\mathrm{d}} Z_t)_2 - {\mathrm{d}}\langle k,\theta_k\rangle_t, \end{cases} \end{align} \begin{align} & \begin{cases} {\mathrm{d}} k ={-} \tilde{\boldsymbol{k}}\boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \boldsymbol{k} \,{\mathrm{d}} t + ({\mathrm{d}} Z_t)_1 + \frac 12 k^{{-}1} \,{\mathrm{d}}\langle Z_2,Z_2\rangle_t, \\ {\mathrm{d}} \theta_k ={-} \tilde{\boldsymbol{k}}^\bot \boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \tilde{\boldsymbol{k}}\,{\mathrm{d}} t + k^{{-}1}({\mathrm{d}} Z_t)_2 + \frac 12 k^{{-}2}\, {\mathrm{d}}\langle Z_1,Z_2\rangle_t. \end{cases} \end{align}
\begin{align} & \begin{cases} {\mathrm{d}} k ={-} \tilde{\boldsymbol{k}}\boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \boldsymbol{k} \,{\mathrm{d}} t + ({\mathrm{d}} Z_t)_1 + \frac 12 k^{{-}1} \,{\mathrm{d}}\langle Z_2,Z_2\rangle_t, \\ {\mathrm{d}} \theta_k ={-} \tilde{\boldsymbol{k}}^\bot \boldsymbol{\cdot} \boldsymbol{\nabla} \bar{\boldsymbol{v}}^{{\rm T}} \tilde{\boldsymbol{k}}\,{\mathrm{d}} t + k^{{-}1}({\mathrm{d}} Z_t)_2 + \frac 12 k^{{-}2}\, {\mathrm{d}}\langle Z_1,Z_2\rangle_t. \end{cases} \end{align}The treatment of the large-scale terms  $\tilde {\boldsymbol {k}}\boldsymbol {\cdot } \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \tilde {\boldsymbol {k}}$ and
$\tilde {\boldsymbol {k}}\boldsymbol {\cdot } \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \tilde {\boldsymbol {k}}$ and  $\tilde {\boldsymbol {k}}^\bot \boldsymbol {\cdot } \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \tilde {\boldsymbol {k}}$ is classical. Interested readers can refer to Lapeyre et al. (Reference Lapeyre, Klein and Hua1999) for details. From the Itō lemma again,
$\tilde {\boldsymbol {k}}^\bot \boldsymbol {\cdot } \boldsymbol {\nabla } \bar {\boldsymbol {v}}^{{\rm T}} \tilde {\boldsymbol {k}}$ is classical. Interested readers can refer to Lapeyre et al. (Reference Lapeyre, Klein and Hua1999) for details. From the Itō lemma again,  ${\mathrm {d}} \log k = {\mathrm {d}} k/k- \frac 12\,{{\mathrm {d}} \langle k, k\rangle _t}/{k^2}$, leading to the simplified wavevector dynamics (4.5)–(4.6).
${\mathrm {d}} \log k = {\mathrm {d}} k/k- \frac 12\,{{\mathrm {d}} \langle k, k\rangle _t}/{k^2}$, leading to the simplified wavevector dynamics (4.5)–(4.6).
Appendix C. Subgrid flow anisotropy and comparison with other works
Throughout this paper, we have considered an isotropic model for the stochastic subgrid velocity (3.11). The isotropic diffusivity matrix  $\boldsymbol{\mathsf{a}} = a_0 \mathbb {I}_d$ is a good illustration of this. In contrast, many authors (e.g. White & Fornberg Reference White and Fornberg1998; Smit & Janssen Reference Smit and Janssen2019; Bôas & Young Reference Bôas and Young2020) assume isotropic and homogeneous turbulence, and obtain anisotropic stochastic subgrid models for
$\boldsymbol{\mathsf{a}} = a_0 \mathbb {I}_d$ is a good illustration of this. In contrast, many authors (e.g. White & Fornberg Reference White and Fornberg1998; Smit & Janssen Reference Smit and Janssen2019; Bôas & Young Reference Bôas and Young2020) assume isotropic and homogeneous turbulence, and obtain anisotropic stochastic subgrid models for  ${\|\boldsymbol {v}\|}/{v_g^0 } \to 0$. In these approaches, the integral over
${\|\boldsymbol {v}\|}/{v_g^0 } \to 0$. In these approaches, the integral over  $\delta \theta$ in diffusivity matrix computations (A3) and (A6) involve singular integrations over the direction
$\delta \theta$ in diffusivity matrix computations (A3) and (A6) involve singular integrations over the direction  $\boldsymbol {v}^0_g=v^0_g \tilde {\boldsymbol {k}}$. This makes a Dirac delta function appear:
$\boldsymbol {v}^0_g=v^0_g \tilde {\boldsymbol {k}}$. This makes a Dirac delta function appear:  $2{\rm \pi} \delta (\boldsymbol {\kappa }\boldsymbol {\cdot }\boldsymbol {v}^0_g) = ({2{\rm \pi} }/{\kappa v^0_g}) (\delta ( \theta _\kappa - \theta _k - {\rm \pi}/2) + \delta ( \theta _\kappa - \theta _k + {\rm \pi}/2))$ (see the Appendix in Bôas & Young Reference Bôas and Young2020). This precision imposes a statistical anisotropy for
$2{\rm \pi} \delta (\boldsymbol {\kappa }\boldsymbol {\cdot }\boldsymbol {v}^0_g) = ({2{\rm \pi} }/{\kappa v^0_g}) (\delta ( \theta _\kappa - \theta _k - {\rm \pi}/2) + \delta ( \theta _\kappa - \theta _k + {\rm \pi}/2))$ (see the Appendix in Bôas & Young Reference Bôas and Young2020). This precision imposes a statistical anisotropy for  $\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t$ (oriented along
$\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t$ (oriented along  $\boldsymbol {k}$) and
$\boldsymbol {k}$) and  $d\boldsymbol {\eta }_t$ (oriented along
$d\boldsymbol {\eta }_t$ (oriented along  $\boldsymbol {k}^\bot$), eventually leading to a covariance
$\boldsymbol {k}^\bot$), eventually leading to a covariance  $\boldsymbol {\varSigma }_{Z} =\gamma _0 k^2 \left [\begin{smallmatrix} 0 & 0 \\ 0 & 16 \end{smallmatrix}\right ]$ ((3.17) in Bôas & Young (Reference Bôas and Young2020), and (24) in Smit & Janssen (Reference Smit and Janssen2019)), no noise
$\boldsymbol {\varSigma }_{Z} =\gamma _0 k^2 \left [\begin{smallmatrix} 0 & 0 \\ 0 & 16 \end{smallmatrix}\right ]$ ((3.17) in Bôas & Young (Reference Bôas and Young2020), and (24) in Smit & Janssen (Reference Smit and Janssen2019)), no noise  ${\mathrm {d}} Z_1$, and no Brownian motion
${\mathrm {d}} Z_1$, and no Brownian motion  $B^{(3)}_t$. Moreover, because of the scaling assumption, Bôas & Young (Reference Bôas and Young2020) neglect the spatial diffusivity matrix
$B^{(3)}_t$. Moreover, because of the scaling assumption, Bôas & Young (Reference Bôas and Young2020) neglect the spatial diffusivity matrix  $\boldsymbol{\mathsf{a}}$, while Smit & Janssen (Reference Smit and Janssen2019, (22)–(23)) find
$\boldsymbol{\mathsf{a}}$, while Smit & Janssen (Reference Smit and Janssen2019, (22)–(23)) find  $\boldsymbol{\mathsf{a}} = 4 a_0 (\mathbb {I}_d +\frac 54 \tilde {\boldsymbol {k}} \tilde {\boldsymbol {k}}^{{\rm T}})$. In this anisotropic framework, the Stratonovich wavevector equation (2.3),
$\boldsymbol{\mathsf{a}} = 4 a_0 (\mathbb {I}_d +\frac 54 \tilde {\boldsymbol {k}} \tilde {\boldsymbol {k}}^{{\rm T}})$. In this anisotropic framework, the Stratonovich wavevector equation (2.3),  ${\mathrm {d}} \boldsymbol {k} = - \boldsymbol {\nabla } (\bar {\boldsymbol {v}}\,{\mathrm {d}} t+\boldsymbol {\sigma } \circ {\mathrm {d}} B_t)^{{\rm T}} \boldsymbol {k}$, would involve an additional drift term in Itō notation.
${\mathrm {d}} \boldsymbol {k} = - \boldsymbol {\nabla } (\bar {\boldsymbol {v}}\,{\mathrm {d}} t+\boldsymbol {\sigma } \circ {\mathrm {d}} B_t)^{{\rm T}} \boldsymbol {k}$, would involve an additional drift term in Itō notation.
Further developing this anisotropic stochastic closure is an interesting avenue. A multiscale anisotropic stochastic closure would involve wavenumber variations but no wavenumber diffusion. Nevertheless, in the present study, we adopt the isotropic model for  $\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t$, which is much more convenient for multi-ray numerical simulations.
$\boldsymbol {\sigma } \,{{\mathrm {d}}} B_t$, which is much more convenient for multi-ray numerical simulations.
Appendix D. Action spectra and ray distribution
Here, we highlight the link between mean action spectral density and the ray distribution. We denote by  $N^0$ the initial wave action spectrum. We first use the definition of the Dirac measure, then perform a variable change corresponding to the characteristic (2.5) from
$N^0$ the initial wave action spectrum. We first use the definition of the Dirac measure, then perform a variable change corresponding to the characteristic (2.5) from  $t=t_i$ to
$t=t_i$ to  $t=t_f$:
$t=t_f$:
 \begin{align} \mathbb{E}
N(\boldsymbol{x},\boldsymbol{k},t) &= \mathbb{E} \iint
{\mathrm{d}} \boldsymbol{x}_r \,{\mathrm{d}}
\boldsymbol{k}_r\,N(\boldsymbol{x}_r,\boldsymbol{k}_r,t)\,
\delta (\boldsymbol{x}_r-\boldsymbol{x} )\,\delta
(\boldsymbol{k}_r-\boldsymbol{k}) \nonumber\\
&= \mathbb{E} \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}_r^0\,N(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0,0)\, \delta (\boldsymbol{x}_r(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0,t)-\boldsymbol{x} )\, \delta (\boldsymbol{k}_r(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0,t)-\boldsymbol{k} )\nonumber\\
&= \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}_r^0\,N^0(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0)\,p(\boldsymbol{x},\boldsymbol{k} \,|\, \boldsymbol{x}_r^0,\boldsymbol{k}_r^0,t),
\end{align}
\begin{align} \mathbb{E}
N(\boldsymbol{x},\boldsymbol{k},t) &= \mathbb{E} \iint
{\mathrm{d}} \boldsymbol{x}_r \,{\mathrm{d}}
\boldsymbol{k}_r\,N(\boldsymbol{x}_r,\boldsymbol{k}_r,t)\,
\delta (\boldsymbol{x}_r-\boldsymbol{x} )\,\delta
(\boldsymbol{k}_r-\boldsymbol{k}) \nonumber\\
&= \mathbb{E} \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}_r^0\,N(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0,0)\, \delta (\boldsymbol{x}_r(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0,t)-\boldsymbol{x} )\, \delta (\boldsymbol{k}_r(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0,t)-\boldsymbol{k} )\nonumber\\
&= \iint {\mathrm{d}} \boldsymbol{x}_r^0 \,{\mathrm{d}} \boldsymbol{k}_r^0\,N^0(\boldsymbol{x}_r^0,\boldsymbol{k}_r^0)\,p(\boldsymbol{x},\boldsymbol{k} \,|\, \boldsymbol{x}_r^0,\boldsymbol{k}_r^0,t),
\end{align}where the standard relation between the Dirac measure and the probability distribution function has been used.
Appendix E. Jet simulation
Again, currents are simulated at resolution  $512\times 512$ on a
$512\times 512$ on a  $1000$ km width squared domain
$1000$ km width squared domain  $[0,L_x]\times [0,L_y]$ through the same code. A backward velocity
$[0,L_x]\times [0,L_y]$ through the same code. A backward velocity  $v_{{Bk}}$ forces a leftward jet structure:
$v_{{Bk}}$ forces a leftward jet structure:
 \begin{equation} \partial_t \omega+ \boldsymbol{v}\boldsymbol{\cdot} \boldsymbol{\nabla} \omega= S_\omega, \quad \text{with} \ \boldsymbol{v}=\boldsymbol{\nabla}^{\bot} \varDelta^{{-}1} (\omega + \omega_{{Bk}}). \end{equation}
\begin{equation} \partial_t \omega+ \boldsymbol{v}\boldsymbol{\cdot} \boldsymbol{\nabla} \omega= S_\omega, \quad \text{with} \ \boldsymbol{v}=\boldsymbol{\nabla}^{\bot} \varDelta^{{-}1} (\omega + \omega_{{Bk}}). \end{equation}
Here,  $S_\omega$ encompasses the linear drag and the hyperviscosity with coefficient
$S_\omega$ encompasses the linear drag and the hyperviscosity with coefficient  ${1/\tau _F = 3.22 \times 10^{-8} \,{\rm s}^{-1}}$ and
${1/\tau _F = 3.22 \times 10^{-8} \,{\rm s}^{-1}}$ and  $\nu _{{HV}} / {{\rm d}\kern0.7pt x}^8 = 3.33 \times 10^{-9} \,{\rm s}^{-1}$, respectively. The background vorticity
$\nu _{{HV}} / {{\rm d}\kern0.7pt x}^8 = 3.33 \times 10^{-9} \,{\rm s}^{-1}$, respectively. The background vorticity  $\omega _{{Bk}}$ is a smooth step function with a wavy interface at
$\omega _{{Bk}}$ is a smooth step function with a wavy interface at  $y=Y_{{Bk}} (x)$:
$y=Y_{{Bk}} (x)$:
 \begin{align} \omega_{{Bk}} (x,y)=\varOmega_{{Bk}} \left(\frac 12 - \text{erf} \left(\frac{y - Y_{{Bk}} (x)}{L_y^\omega}\right)\right),\quad \text{with} \ Y_{{Bk}} (x)=L_y \left(\frac{1}{2} + \frac{1}{30} \cos{\left(\frac{2 {\rm \pi}}{L_x}\,x\right)}\right). \end{align}
\begin{align} \omega_{{Bk}} (x,y)=\varOmega_{{Bk}} \left(\frac 12 - \text{erf} \left(\frac{y - Y_{{Bk}} (x)}{L_y^\omega}\right)\right),\quad \text{with} \ Y_{{Bk}} (x)=L_y \left(\frac{1}{2} + \frac{1}{30} \cos{\left(\frac{2 {\rm \pi}}{L_x}\,x\right)}\right). \end{align}To better highlight the interplay between ray oscillations and scattering, we consider very collimated swells, with spatial extension  $100 \lambda = 25$ km.
$100 \lambda = 25$ km.
Besides, the curvature of the simulated jet can force an additional faster oscillation around the jet for small enough wavevector angle. Indeed, a wave group travelling exactly rightward would cross an alternation of positive and negative vorticity regions with period  $L_x/(v_g^0-\bar {U}_0) \approx 1\,{\rm day} < 2 {\rm \pi}/\bar {\omega }_r$. Here, we set an initial wavevector angle large enough to prevent the additional harmonics.
$L_x/(v_g^0-\bar {U}_0) \approx 1\,{\rm day} < 2 {\rm \pi}/\bar {\omega }_r$. Here, we set an initial wavevector angle large enough to prevent the additional harmonics.






















































 Open access
Open access