



1. Introduction
With the development of robotics and artificial intelligence, robot intelligent operation has excellent research potential. Among many critical operational capabilities, the ability to grasp is fundamental and essential, which will bring enormous power to the industry, home, service, warehouse, medical field, and so on refs. [Reference Tian, Wang, Liu, Qiao and Li1–Reference Yan, Deng, Chen, Nie and Zhang5]. Moreover, effectively grasping transparent and specular objects remains challenging in robot grasp operations [Reference Weng, Pallankize, Tang, Kroemer and Held6–Reference Sajjan, Moore, Pan, Nagaraja, Lee, Zeng and Song8].
Nowadays, methods for grasping tasks can be summarized as analytic and data-driven methods. Though methods based on analytic methods can reliably grasp objects, these approaches usually require miscellaneous information about the object, such as the geometry of the object, a physical model, kinematics, dynamics, and mechanical analysis, and which are often not easily accessible [Reference Ju, Yang, Li, Cheng and Ma9–Reference Marwan, Chua and Kwek11].
In contrast, many modern data-driven methods for grasping objects rely on only visual information. It is very efficient for application because visual information is often easier and quicker to obtain. Meanwhile, with the improvement of computability, more and more researchers have developed deep learning methods for robotic manipulations [Reference Yu, Zhai, Xia, Wu and Liao12–Reference Lu, Cai, Lu, Cao, Guo and Wang18]. Considering robots often inevitably need to grasp objects in unstructured scenes, many studies around deep learning methods based on visual information have become active [Reference Tian, Song, Li, Ma, Xu and Yan19, Reference Kundu, Dutta and Kumar20].
Most modern grasp detection [Reference Mahler, Liang, Niyaz, Laskey, Doan, Liu, Ojea and Goldberg21–Reference Kim, Li and Lee23] is based on convolutional neural networks, which have become the mainstream for grasp tasks based on visual information. Specifying a suitable grasp configuration is an essential issue in the image from the visual sensor. Reference [Reference Lenz, Lee and Saxena24] proposed a method that represented the grasp configuration with a rectangle. Besides, some researchers proposed that a series of grasp candidates be generated first, and then the optimal grasp be selected from them [Reference Redmon and Angelova25]. However, these methods are relatively time-consuming and limited to real-time performance in generating candidates. Meanwhile, there is still room for improvement in the success rate of grasping.
Grasp tasks require both efficient real-time performance and accuracy. Reference [Reference Yu, Zhai, Xia, Wu and Liao12] proposed a novel grasp detection method that is based on Unet [Reference Ronneberger, Fischer and Brox26]. The method can predict the pixel-level grasping pose and grasping quality based on the input image without generating candidates. Therefore, it is sufficiently fast for real-time work, and considering it incorporates the squeeze-and-excitation (SE) attention mechanism [Reference Gu, Su and Bi27], the approach achieves impressive accuracy on public datasets. However, the SE attention mechanism still has certain shortcomings, such as when obtaining channel features, using dimensionality reduction to a low-dimensional space first and then mapping it back to the original dimension, which makes it impossible to establish a direct relationship between the channel and its weight, which can affect both accuracy and real-time performance.
In order to solve these problems and improve the performance of grasp detection, this paper presents a visual grasp detection framework. We adopt the residual block with the Efficient Channel Attention (ECA) mechanism incorporated. It overcomes the reaction of dimensionality reduction in the traditional SE attention mechanism and utilizes informative features to improve the network model’s predicted accuracy by establishing a direct relationship between the channel and its weight. It can efficiently and accurately identify the graspable area of the object in the input image and output pixel-wise quality scores to obtain appropriate grasp configuration. We also evaluate our method on the Cornell dataset and the Jacquard dataset. The result shows our method achieves 98.9% and 95.8% accuracy, respectively, which is competitive with the state-of-the-art. Through using a 6-degree of freedom (DOF) UR-5 robotic arm for real-world grasp experiments, our method achieves a 93.6% grasp success rate in unstructured real-world scenes.
The contributions can be summarized as follows:
-
1) We have constructed the Efficient Channel Attention Residual Network (ECA-ResNet) module based on ref. [Reference Wang, Wu, Zhu, Li, Zuo and Hu28] that directly establishes the relationship between channels and weights, which is beneficial for improving channel attention learning and reducing model complexity. The module enables the Efficient Grasp Aware Network (EGA-Net) to distinguish between objects and backgrounds and avoids the gradient vanishing problem caused by increasing the number of layers through residual layers, thereby improving learning efficiency.
-
2) The EGA-Net is proposed to generate pixel-level grasp poses and their quality score. The EGA-Net consists of two parts: feature extraction and feature fusion. Feature extraction is used to emphasize and obtain semantic information relevant to grasping features, while feature fusion is used to fuse low-level information containing rich spatial information. Meanwhile, it is only trained on the dataset that contains a single type of object; it still has a high success rate in grasping different types of objects.
-
3) Our method achieves competitive results versus state-of-the-art grasp methods on public datasets and real-world robotic grasp experiments.
2. Related work
2.1. Methods for grasp task
In the earlier period, most researchers used analytical methods to grasp tasks based on hand-engineering the features in specific tasks [Reference Caldera, Rassau and Chai29–Reference Bicchi and Kumar31]. Meanwhile, though these methods possess high performance for grasping known objects, they cannot be extended to grasp unknown objects. When facing different scenes or types of objects, this method is often no longer applicable. With the rapid development of artificial intelligence, a new grasp detection method called the data-driven method has shown great potential in grasp tasks [Reference Morrison, Corke and Leitner13, Reference Kumra, Joshi and Sahin14]. These methods can solve the shortcomings of the analytic methods. It typically uses machine learning to develop models that map information read by sensors directly to ground truth from humans, physical, and simulation trials. These methods often require large-scale datasets to support training. The most important conception of the method is to enable robots to imitate human grasp strategies [Reference Tan, Alqasemi, Dubey and Sarkar32]. Meanwhile, it typically requires close interaction between sensors and the environment.
2.2. Deep learning methods for grasp detection
In recent years, deep learning methods have achieved enormous advances in computer vision, natural language processing, and reinforce learning [Reference Lu, Cai, Lu, Cao, Guo and Wang18, Reference LeCun, Bengio and Hinton33, Reference Van Hasselt, Guez and Silver34]. Inspired by these fields, many robotic researchers have begun to attempt to apply deep learning techniques to the field of grasp detection. Reference [Reference Niu, Lu, Chen, Yang and Yang35] proposed a visual enhancement guided grasp detection model (VERGNet), which includes a low-light feature enhancement strategy to improve the effectiveness of robot grasping under low-light conditions. Reference [Reference Kumra, Joshi and Sahin36] further improved the performance of the Generative Residual Convolutional Neural Network (GR-ConvNet) by adding a dropout layer and replacing the rectified linear unit (ReLU) activation function with Mish as the activation function. Reference [Reference Yu, Zhai and Xia37] proposes Selective Kernel convolution Grasp detection Network (SKGNet) based on Selective Kernel Convolution. It achieved excellent performance on single-type object datasets. However, a large number of model parameters compromised the real-time performance of the network. The current notable grasp detection methods can be divided into regression-based, classification-based, and detection-based methods.
The method by which the model directly predicts the grasp configuration by inputting relevant observation data of objects that can be grasped implicitly into the model is called the regression-based method. Reference [Reference Redmon and Angelova25] directly regresses the raw RGB-D image to obtain the grasp configuration instead of classifying many small patches in a sliding window type method and only needs to consider a single image and make a global prediction.
Rather than regression-based methods, ref. [Reference Chu, Xu and Vela38] plans the grasp representation orientation mapping as a classification task, which defines the learning problem to be classified with null hypothesis competition.
For detection-based methods, this type of method draws inspiration from the idea of semantic segmentation, transforming the prediction of grasp configuration into a prediction of the segmentation problem of optimal grasp area, such as refs. [Reference Morrison, Corke and Leitner13, Reference Kumra, Joshi and Sahin14].
In general, these detection-based methods can directly predict reliable grasp configurations and are highly effective. The above methods have achieved remarkable results in the field of grasp detection. However, they still need to consider the use of attention mechanisms to distinguish objects and backgrounds better, and there is still room for improvement in the accuracy of grasp detection. In addition, many detection methods do not consider grasping different types of objects, such as opaque, transparent, and specular objects. Thus, we propose a novel approach, EGA-Net, to address these issues by ECA-ResNet module based on ref. [Reference Wang, Wu, Zhu, Li, Zuo and Hu28], which enables the network to reweigh channel weights to extract grasp-related information better. So, our method can distinguish between objects and backgrounds. Meanwhile, by using RGB-D multi-modal data as input to the EGA-Net, our method can effectively grasp different types of objects.
3. Problem statement
We describe the grasping task as a robot using the generated grasp configuration to perform grasping. Specifically, by inputting the RGB-D image of the grasping scene into our model, the model will output four heat maps representing the grasp configuration. We selected the grasp configuration with the highest grasp quality as the action that the robotic arm will perform, and we used a depth camera to obtain the RGB-D image of the grasping scene.
Most studies on grasp detection mainly use two grasp representations: grasp contact points and grasp rectangle. The grasp contact points representation method has the characteristics of being simple, direct, and easy to identify. It can perform dense grasp detection on the image in tasks. However, it cannot indicate the width of the opening or the orientation of the end-effector in detail [Reference Zhang, Leitner, Milford, Upcroft and Corke39]. Considering the characteristics of our method, we choose the grasp rectangle as the grasp detection representation and use an improved version of the grasp rectangle [Reference Kumra, Joshi and Sahin14] to represent an appropriate grasp configuration and overcome the limitation of the grasp point representation method. We denote the grasp configuration in the image coordinate frame as:
 \begin{align} G_{I}(q,p,\theta, \omega ) \end{align}
\begin{align} G_{I}(q,p,\theta, \omega ) \end{align}
where
 $q$
represents the grasp quality,
$q$
represents the grasp quality,
 $p(u,v)$
corresponds to the gripper’s center position in image coordinate frame, the gripper’s rotation angle around the z-axis is represented by
$p(u,v)$
corresponds to the gripper’s center position in image coordinate frame, the gripper’s rotation angle around the z-axis is represented by
 $\theta$
, and
$\theta$
, and
 $\omega$
represents the required gripper width.
$\omega$
represents the required gripper width.
Grasp quality takes a value of
 $[0,1]$
; the closer the score is to 1, the more likely the robotic arm is to grasp the object under the given grasp configuration successfully. To enable model learning smoothly, we calculate the gripper’s rotation angle
$[0,1]$
; the closer the score is to 1, the more likely the robotic arm is to grasp the object under the given grasp configuration successfully. To enable model learning smoothly, we calculate the gripper’s rotation angle
 $\theta$
using
$\theta$
using
 $\text{sin}(2\phi )$
and
$\text{sin}(2\phi )$
and
 $\text{cos} (2\phi )$
during post-processing by:
$\text{cos} (2\phi )$
during post-processing by:
 \begin{align} \theta =\frac{1}{2}\arctan \frac{\text{sin} (2\phi )}{\text{cos} (2\phi )},\theta \in \left[{-}\frac{\pi }{2}, \frac{\pi }{2}\right] \end{align}
\begin{align} \theta =\frac{1}{2}\arctan \frac{\text{sin} (2\phi )}{\text{cos} (2\phi )},\theta \in \left[{-}\frac{\pi }{2}, \frac{\pi }{2}\right] \end{align}
Because the gripper is symmetrical around
 $\pm \frac{\pi }{2}$
. Thus,
$\pm \frac{\pi }{2}$
. Thus,
 $\theta$
is given in the range
$\theta$
is given in the range
 $\left[{-}\frac{\pi }{2}, \frac{\pi }{2}\right]$
. For
$\left[{-}\frac{\pi }{2}, \frac{\pi }{2}\right]$
. For
 $\omega$
, its pixel values are set in the range of [0,
$\omega$
, its pixel values are set in the range of [0,
 $\omega _{max}$
], and
$\omega _{max}$
], and
 $\omega _{max}$
can be adjusted according to the maximum width of the gripper. The above grasp configuration is described in the image coordinate frame. We can convert the grasp configuration to the robot reference coordinate frame by:
$\omega _{max}$
can be adjusted according to the maximum width of the gripper. The above grasp configuration is described in the image coordinate frame. We can convert the grasp configuration to the robot reference coordinate frame by:
 \begin{align} G_{R}=T_{RC}(T_{CI}({G_{I}})) \end{align}
\begin{align} G_{R}=T_{RC}(T_{CI}({G_{I}})) \end{align}
where
 $T_{CI}$
is the transformation of the image coordinate frame to the camera coordinate frame, and
$T_{CI}$
is the transformation of the image coordinate frame to the camera coordinate frame, and
 $T_{RC}$
converts the camera coordinate frame to the robot reference coordinate frame by the hand-eye calibration result (see Figure 1).
$T_{RC}$
converts the camera coordinate frame to the robot reference coordinate frame by the hand-eye calibration result (see Figure 1).

Figure 1. The transformation between the camera coordinate frame and the robot reference coordinate frame.
4. Method

Figure 2. The robot visual grasp detection pipeline.
The grasp detection task we need to complete requires the use of a model to process the input image and classify the objects to be grasped in the image and the environment, similar to a segmentation task. In addition, we also need to extract semantic information about the object’s properties, such as position and posture. Considering practical applications, we also need to simplify model complexity as much as possible to ensure its real-time performance.
Based on the above requirements, we consider selecting a segmentation network with outstanding segmentation and relatively lightweight performance as the backbone. We propose a novel model, a framework used initially for biomedical image segmentation [Reference Ronneberger, Fischer and Brox26]. To improve the accuracy of prediction, we introduce the ECA-ResNet module. Our robot visual grasp detection pipeline can be divided into three parts: first, we use a depth camera to obtain the required visual information, and then our model serves as the perception function. Finally, we send the appropriate grasp configuration to the robotic arm to complete the grasp action (see Figure 2).

Figure 3. ECA-ResNet module.
4.1. Efficient Channel Attention Residual Network (ECA-ResNet)
In order to improve the prediction accuracy of the model, we need to make the network ignore environmental information unrelated to the object as much as possible. Introducing attention mechanisms has been proven effective by most works [Reference Yu, Zhai, Xia, Wu and Liao12, Reference Wang, Zhou and Kan15, Reference Gu, Su and Bi27, Reference Wang, Wu, Zhu, Li, Zuo and Hu28, Reference Hu, Shen and Sun40]. Therefore, we adopt a channel attention mechanism to improve the network’s ability to obtain global features, reduce attention to noise and trivial information, and extract feature channels related to grasping tasks.
We proposed the ECA-ResNet module into our model; the module is given in Figure 3. It consisted of three convolution layers at first. Then, the global average pooling (GAP) and ECA module, where the reduction ratio r is set to 16, was used. Specifically, assuming the input is
 $X$
, the channel weight calculated by the ECA can be represented by Equation 4:
$X$
, the channel weight calculated by the ECA can be represented by Equation 4:
 \begin{align} \boldsymbol{\mathcal{W}}_{eca}= \sigma (\mathbb{W}_{poe}(f(X))) \end{align}
\begin{align} \boldsymbol{\mathcal{W}}_{eca}= \sigma (\mathbb{W}_{poe}(f(X))) \end{align}
where
 $f(X)=\frac 1{HW}\sum _{i=1,\,j=1}^{H,W} X_{ij}$
is channel-wise GAP,
$f(X)=\frac 1{HW}\sum _{i=1,\,j=1}^{H,W} X_{ij}$
is channel-wise GAP,
 $\sigma$
is a Sigmoid function, and
$\sigma$
is a Sigmoid function, and
 $\mathbb{W}_{poe}$
has
$\mathbb{W}_{poe}$
has
 \begin{align} \begin{bmatrix} \omega ^{1} & \cdots & \omega ^{k} & 0 & 0 & \cdots & \cdots & 0\\[5pt] 0 & \omega ^{1} & \cdots & \omega ^{k} & 0 & \cdots & \cdots & 0\\[5pt] \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots & \vdots \\[5pt] 0 & \cdots & 0 & 0 & \cdots & \omega ^{1} & \cdots & \omega ^{k}\\[5pt] \end{bmatrix} \end{align}
\begin{align} \begin{bmatrix} \omega ^{1} & \cdots & \omega ^{k} & 0 & 0 & \cdots & \cdots & 0\\[5pt] 0 & \omega ^{1} & \cdots & \omega ^{k} & 0 & \cdots & \cdots & 0\\[5pt] \vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots & \vdots \\[5pt] 0 & \cdots & 0 & 0 & \cdots & \omega ^{1} & \cdots & \omega ^{k}\\[5pt] \end{bmatrix} \end{align}
As for Equation 5, such method can be efficiently implemented by a fast 1D convolution with kernel size of
 $k$
:
$k$
:
 \begin{align} \sigma (\mathbb{W}_{poe}(f(X))) = \sigma (C1D_{k}(f(X))) \end{align}
\begin{align} \sigma (\mathbb{W}_{poe}(f(X))) = \sigma (C1D_{k}(f(X))) \end{align}
After channel-wise GAP without dimensionality reduction, the ECA module obtains local cross-channel interaction by considering the impact of
 $k$
neighbors [Reference Wang, Wu, Zhu, Li, Zuo and Hu28]. Replacing the two full connections in the traditional SE block with 1
$k$
neighbors [Reference Wang, Wu, Zhu, Li, Zuo and Hu28]. Replacing the two full connections in the traditional SE block with 1
 $D$
convolution can directly establish the relationship between channels and their weights. In the SE block, the channel weight calculated can be represented by Equation 7:
$D$
convolution can directly establish the relationship between channels and their weights. In the SE block, the channel weight calculated can be represented by Equation 7:
 \begin{align} \boldsymbol{\mathcal{W}}_{se}= \sigma (W_{2}ReLu(W_{1}(f(X)))) \end{align}
\begin{align} \boldsymbol{\mathcal{W}}_{se}= \sigma (W_{2}ReLu(W_{1}(f(X)))) \end{align}
where there are a total of
 $2 \times (\frac{C^{2}}{r})$
parameters,
$2 \times (\frac{C^{2}}{r})$
parameters,
 $W_{1}$
and
$W_{1}$
and
 $W_{2}$
contain parameters
$W_{2}$
contain parameters
 $C\times (\frac{C}{r})$
and
$C\times (\frac{C}{r})$
and
 $(\frac{C}{r})\times C$
, respectively. The fact that the ECA module only contains
$(\frac{C}{r})\times C$
, respectively. The fact that the ECA module only contains
 $k$
parameters, which is usually less than
$k$
parameters, which is usually less than
 $2 \times (\frac{C^{2}}{r})$
. So, we simplified the complexity of the model. We improve the model’s prediction accuracy and real-time performance based on the above reasons. Meanwhile, we can improve the effect of our model by increasing the number of layers. However, excessive layers may prevent smooth learning; they induce problems such as vanishing gradients, overfitting, and dimensionality errors, which harm performance [Reference He, Zhang, Ren and Sun41]. So, we use the residual layer to solve the problems above. As shown in the bottom frame of Figure 3, assuming the input is
$2 \times (\frac{C^{2}}{r})$
. So, we simplified the complexity of the model. We improve the model’s prediction accuracy and real-time performance based on the above reasons. Meanwhile, we can improve the effect of our model by increasing the number of layers. However, excessive layers may prevent smooth learning; they induce problems such as vanishing gradients, overfitting, and dimensionality errors, which harm performance [Reference He, Zhang, Ren and Sun41]. So, we use the residual layer to solve the problems above. As shown in the bottom frame of Figure 3, assuming the input is
 $x_{in}$
, the output
$x_{in}$
, the output
 $x_{out}$
of the ECA-ResNet module can be represented by Equation 8.
$x_{out}$
of the ECA-ResNet module can be represented by Equation 8.
 \begin{align} \left \{ \begin{array}{l}{x_{out0}} = \boldsymbol{\mathcal{W}}_{Conv}(x_{in}),\\[3pt] {x_{out1}} = \sigma (\mathbb{W}_{poe}(f(x_{out0})))x_{out0}, \\[3pt] {x_{out}} = x_{in} + x_{out1} \end{array} \right . \end{align}
\begin{align} \left \{ \begin{array}{l}{x_{out0}} = \boldsymbol{\mathcal{W}}_{Conv}(x_{in}),\\[3pt] {x_{out1}} = \sigma (\mathbb{W}_{poe}(f(x_{out0})))x_{out0}, \\[3pt] {x_{out}} = x_{in} + x_{out1} \end{array} \right . \end{align}
where
 $\boldsymbol{\mathcal{W}}_{Conv_Relu}$
indicates three convolution operations, with a ReLU after each convolution operation.
$\boldsymbol{\mathcal{W}}_{Conv_Relu}$
indicates three convolution operations, with a ReLU after each convolution operation.

Figure 4. Architecture of the Efficient Grasp Aware Network.
4.2. Network architecture
We present the architecture of the EGA-Net in Figure 4, which is inspired by ref. [Reference Ronneberger, Fischer and Brox26]. To fully utilize visual information, we use the 4-channel multi-modal RGB-D image as input to the model [Reference Weng, Pallankize, Tang, Kroemer and Held6]. The model consists of two parts: feature extraction and feature fusion. The feature extraction obtains high-level information in the image through convolution and pooling operations and emphasizes semantic information relevant to grasping features using the constructed ECA-ResNet module. Afterward, to ensure that low-level information containing rich spatial information is not lost, we concatenate low-level features and ultimately output a heatmap that includes grasp quality, grasp angle, and grasp width in the feature fusion section. The process can be described as follows: First, features of the 4-channel image are extracted by a convolutional layer to get a sizeable receptive field; the output size is
 $224\times 224\times 32$
. Then, the output as input forwards Maxpooling (
$224\times 224\times 32$
. Then, the output as input forwards Maxpooling (
 $kernel size=2, stride=2$
) and Doubledownsample layers (
$kernel size=2, stride=2$
) and Doubledownsample layers (
 $kernel size=3, padding=1$
), and the size of the output is
$kernel size=3, padding=1$
), and the size of the output is
 $112\times 112\times 64$
, defined as
$112\times 112\times 64$
, defined as
 $x_{1}$
. We will pass this output through Maxpooling and Doubledownsample again; the output size is
$x_{1}$
. We will pass this output through Maxpooling and Doubledownsample again; the output size is
 $56\times 56\times 128$
. After that, the efficient channel attention and residual layer are used to suppress the corresponding trivial background area, which smooths learning, extracts the saliency features, and improves the predicted accuracy of the network. MaxPooling and Doubledownsample layers were followed after this ECA module, and the output size is
$56\times 56\times 128$
. After that, the efficient channel attention and residual layer are used to suppress the corresponding trivial background area, which smooths learning, extracts the saliency features, and improves the predicted accuracy of the network. MaxPooling and Doubledownsample layers were followed after this ECA module, and the output size is
 $28\times 28\times 256$
, defined as
$28\times 28\times 256$
, defined as
 $x_{2}$
. The output as input forwards the ECA module and Maxpooling and Doubledownsample layers again; the output size is
$x_{2}$
. The output as input forwards the ECA module and Maxpooling and Doubledownsample layers again; the output size is
 $14\times 14\times 512$
, defined as
$14\times 14\times 512$
, defined as
 $x_{3}$
. Then,
$x_{3}$
. Then,
 $x_{3}$
is fed into the ECA module, and the output size is also
$x_{3}$
is fed into the ECA module, and the output size is also
 $14\times 14\times 512$
, defined as
$14\times 14\times 512$
, defined as
 $x_{4}$
. We feed
$x_{4}$
. We feed
 $x_{3}$
and
$x_{3}$
and
 $x_{4}$
into the Upsample layer, concatenate them, and then pass them to the double convolutional layer. The output size is
$x_{4}$
into the Upsample layer, concatenate them, and then pass them to the double convolutional layer. The output size is
 $28\times 28\times 256$
. Meanwhile, we use the batch normalization and the ReLU function in all convolution layers.
$28\times 28\times 256$
. Meanwhile, we use the batch normalization and the ReLU function in all convolution layers.
Our EGA-Net model processes the 4-channel image in a single pass to predict an appropriate grasp configuration, which includes four components: grasp quality,
 $\text{sin}(2\phi )$
,
$\text{sin}(2\phi )$
,
 $\text{cos}(2\phi )$
, and the opening width of the gripper. We choose the pixel
$\text{cos}(2\phi )$
, and the opening width of the gripper. We choose the pixel
 $p=(u,v)$
with the highest grasp quality in the grasp quality heat map as the grasp position and use the grasp angle and grasp width represented by the same pixel position in the grasp angle heat map and grasp width heat map as the grasp configuration.
$p=(u,v)$
with the highest grasp quality in the grasp quality heat map as the grasp position and use the grasp angle and grasp width represented by the same pixel position in the grasp angle heat map and grasp width heat map as the grasp configuration.
A grasp rectangle can represent the necessary parameters mentioned above. Specifically, in the image coordinate frame, we use the position of the pixel
 $p=(u,v)$
with the highest grasp quality in the grasp quality map output from the EGA-Net as the vertical projection of the center of the gripper’s fingertips, the angle
$p=(u,v)$
with the highest grasp quality in the grasp quality map output from the EGA-Net as the vertical projection of the center of the gripper’s fingertips, the angle
 $\theta$
of the rectangle as the rotation angle of the gripper around the z-axis, and the length
$\theta$
of the rectangle as the rotation angle of the gripper around the z-axis, and the length
 $\omega$
of the rectangle as the gripping width, as shown in the Figure 5.
$\omega$
of the rectangle as the gripping width, as shown in the Figure 5.

Figure 5. The grasp rectangle represents grasp configuration.
4.3. Evaluation metric
To fairly evaluate the performance of our model, we use the rectangle metric for our method. According to ref. [Reference Jiang, Moseson and Saxena42], it can be considered successful when a grasp configuration meets the following conditions:
-
• The intersection over union (IOU) score between the predicted grasp
 $G_{p}$
and the ground truth grasp
$G_{t}$
is higher than 25%
$G_{p}$
and the ground truth grasp
$G_{t}$
is higher than 25% -
• The difference between the grasp orientation of the predicted grasp rectangle and the grasp orientation of the ground truth rectangle is less than
$30^{\circ }$
.



Where the IOU score for the predicted grasp
 $G_{p}$
and the ground truth grasp
$G_{p}$
and the ground truth grasp
 $G_{t}$
is defined as:
$G_{t}$
is defined as:
 \begin{align} \textrm{IOU}(G_{p}, G_{t})=\frac{G_{p} \cap G_{t}}{G_{p} \cup G_{t}} \end{align}
\begin{align} \textrm{IOU}(G_{p}, G_{t})=\frac{G_{p} \cap G_{t}}{G_{p} \cup G_{t}} \end{align}
where
 $G_{p}$
is the predicted grasp rectangle and
$G_{p}$
is the predicted grasp rectangle and
 $G_{t}$
is the ground truth grasp rectangle. The IOU score is the quotient of the area of intersection between two rectangles and the area of union.
$G_{t}$
is the ground truth grasp rectangle. The IOU score is the quotient of the area of intersection between two rectangles and the area of union.
4.4. Loss function
In order to train our model well, we need to choose a stable and efficient loss function. Thus, we calculate all losses in the output of the EGA-Net and choose the sum of losses to optimize our model. The entire function is defined as:
 \begin{align} Loss(G_p, G_t)=\frac{1}{n}\sum _{i}l_{i} \end{align}
\begin{align} Loss(G_p, G_t)=\frac{1}{n}\sum _{i}l_{i} \end{align}
where
 $n$
represents the number of samples,
$n$
represents the number of samples,
 $l_{i}=\alpha l_{pos}+\beta (l_{cos}+l_{sin})+\gamma l_{\omega }$
,
$l_{i}=\alpha l_{pos}+\beta (l_{cos}+l_{sin})+\gamma l_{\omega }$
,
 $l_{pos},l_{cos},l_{sin}$
, and
$l_{pos},l_{cos},l_{sin}$
, and
 $l_{\omega }$
are the smooth
$l_{\omega }$
are the smooth
 $L1$
losses of all outputs of the model, respectively. Where
$L1$
losses of all outputs of the model, respectively. Where
 $smooth L1$
loss is defined as:
$smooth L1$
loss is defined as:
 \begin{align} \ smooth L1=\left \{ \begin{array}{ll} 0.5(G_{t}-G_{p})^2, &if\lvert G_{t}-G_{p}\rvert \lt 1\\[4pt] \lvert G_{t}-G_{p}\rvert -0.5, &otherwise\\ \end{array} \right . \end{align}
\begin{align} \ smooth L1=\left \{ \begin{array}{ll} 0.5(G_{t}-G_{p})^2, &if\lvert G_{t}-G_{p}\rvert \lt 1\\[4pt] \lvert G_{t}-G_{p}\rvert -0.5, &otherwise\\ \end{array} \right . \end{align}
A suitable grasp configuration is crucial for successfully grasping an object. Thus, the position and rotation angle of the gripper are very important. Besides, an appropriate gripper opening width can avoid unnecessary collisions. Thus, we experimentally set
 $\alpha =1, \beta =10$
, and
$\alpha =1, \beta =10$
, and
 $\gamma =5$
.
$\gamma =5$
.
4.5. Training details
All networks involved in this paper are implemented with PyTorch. All networks are trained end-to-end with a single NVIDIA TITAN V GPU, which has a total of 192 GB of memory. The batch size is set to 8, and the optimizer used in this paper is Adam. The learning rate is set to 0.0001. We take a center crop of 224
 $\times$
224 pixels for input data.
$\times$
224 pixels for input data.
5. Experiment setup
To verify the performance of the proposed method, we choose to test it on the Cornell dataset and the Jacquard dataset. The Cornell dataset is widely used in the field of grasp detection, but it contains comparatively less data, in fact. Some researchers have proposed methods to improve the performance of models trained on limited datasets and have demonstrated through experiments that these methods are effective [Reference Shukla, Pramanik, Mehta and Nandi43, Reference Kushwaha, Shukla and Nandi44]. Thus, we also chose to test the performance of the method using the large-scale Jacquard dataset. Meanwhile, we conducted ablation studies to test the contribution of each component in the network, demonstrating the high performance of our method through comparison experiments. In addition, we implemented the method on a real robotic arm to verify its feasibility.
5.1. Cornell dataset
The Cornell dataset is the first dataset to use the grasp rectangle as a grasp representation and is widely used. The Cornell dataset contains a total of 224 objects with 885 RGB-D images. Each RGB-D image has a resolution of
 $640\times 480$
pixels. It has approximately 5110 positive and 2909 negative grasps. Each image is labeled with multiple grasp poses, which is helpful for our model to output a pixel-level grasp configuration. The quality of the dataset will directly affect the performance of the trained model. We improve the performance of the model by implementing an augmented Cornell dataset using random zooms, crops, and rotations.
$640\times 480$
pixels. It has approximately 5110 positive and 2909 negative grasps. Each image is labeled with multiple grasp poses, which is helpful for our model to output a pixel-level grasp configuration. The quality of the dataset will directly affect the performance of the trained model. We improve the performance of the model by implementing an augmented Cornell dataset using random zooms, crops, and rotations.
We divided the dataset into two parts, where 90% of the dataset is used as the training set, and 10% is the testing set. In order to demonstrate the performance of our model fairly, we divide the Cornell dataset into two sets: image-wise (IW) and object-wise (OW).
5.2. Jacquard dataset
Compared to the Cornell dataset, the Jacquard dataset has a wider variety of object types and a larger scale of labeled data, which is beneficial for improving the model’s generalization ability. The Jacquard dataset contains 11,000 objects with 54,000 images, which collects labeled data through self-supervised simulation of robotic arms. Because the dataset is enough for the training process, data augmentation will not be performed in this dataset. Similarly, we use 90% of the dataset as the training set and the other 10% as the testing set.
5.3. Grasp experiment
We use a 6-DOF UR-5 robotic arm with a Robotiq 2F-140 gripper for robotic grasp-and-place. We adopt an Intel RealSense D435i RGB-D camera that uses stereo vision to calculate depth and an infrared projector that is fixed 0.8 m above the workspace (see Figure 6) to obtain information about the objects. The EGA-Net is performed on a PC running Windows 10 with a 2.6 GHz Intel Core i7-10750 CPU, NVIDIA GTX 1650Ti graphics card, and 16 GB of RAM allocated per job. To verify the generalization ability of our model, we selected a series of objects with different shapes and types for the grasp experiment in the physical world, all of which the model had never seen before.

Figure 6. Grasp experiment.
We perform grasp tests of the isolated scene, the cluttered scene, and the non-clutter scene. All objects used in the experiment are shown in Figure 7. It is worth noting that even when facing challenging types (transparent and specular) of objects, our model can still achieve a great success rate in a variety of scenes.

Figure 7. Objects of a variety of scenes.
6. Experiments
6.1. Grasp detection on cornell dataset
Because the EGA-Net combines the color space containing rich texture information with depth data containing object shape information, the method can predict the angle and width of the object to be grasped well. In addition, through the ECA-Resnet module, the EGA-Net can distinguish objects from the background and segment suitable grasp areas.
Table I. Results on Cornell dataset.
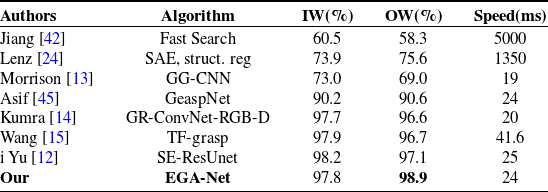

Figure 8. The part grasp detection results on the Cornell dataset.
To show the effectiveness of our method, the EGA-Net is compared with recent methods in Table I. The EGA-Net outperforms these methods and achieves an accuracy of 98.9%, which is competitive with the state-of-the-art. It is worth noting that EGA-Net can accurately locate the object to be grasped from the environment through the application of attention mechanisms; meanwhile, a dropout layer is added to each of the output layers of the network to improve generalization ability. Data augmentation is used to enrich the dataset during training, making the network achieve better results under OW. Due to the lighter weight of the ECA-ResNet modules we use, the average inference speed of the model can reach 24 ms per image, with high real-time performance. We also present the part prediction results of EGA-Net on the Cornell dataset in Figure 8. We chose the grasp configuration with the highest grasp quality for the robotic arm to execute, which is shown in the top row of the Figure 8. The other rows are heat maps of grasp quality, angle, and width, respectively. It shows our method achieved impressive results on the Cornell dataset.
6.2. Grasp detection on jacquard dataset
The performance on the Jacquard dataset is shown in Table II, and our proposed method achieved high accuracy, achieving a prediction accuracy of 95.8%. We have also provided heat maps of prediction results on the part of the Jacquard datasets, as shown in Figure 9. From the Figure 9, we can qualitatively observe that our method can predict secure and robust grasp configuration, which contributes to increased prediction accuracy for grasp detection tasks.
Table II. Results on Jacquard dataset.

6.3. Ablation studies
In order to assess the influence of the incorporated components on the predictive performance of the model, we conducted ablation experiments. The accuracy of the model trained on the Cornell dataset was measured using the same training methodology to evaluate the contributions of each component, as presented in Table III. Our findings from these experiments reveal that incorporating an attention mechanism is beneficial for improving network performance. Specifically, we found that the ECA mechanism outperforms other attention mechanisms in terms of effectiveness. Additionally, when combined with residual networks, it further enhances overall model performance.
6.4. Comparison studies
We conducted comparison studies and used the same input data and training settings to compare the performance of our method with other outstanding methods like GG-CNN [Reference Morrison, Corke and Leitner13], GR-ConvNet [Reference Kumra, Joshi and Sahin14], and SE-ResUnet [Reference Yu, Zhai, Xia, Wu and Liao12] on the Cornell dataset, Jacquard dataset, and real-world scenes. In the comparison studies, for fairness, we used same training settings and the same input data for each dataset and only changed the network for the experiment.
For the Cornell dataset, as shown in Figure 10, our method achieves higher grasp quality in terms of the object’s graspable region. Additionally, for a given grasp point, our method determines a more suitable grasp angle and width. This advantage enhances the safety and reliability of robotic arm grasp actions in real-world scenes.
For the Jacquard dataset, as shown in Figure 11, our method can accurately distinguish between the background and object of each scene. GG-CNN’s grasp angle of prediction and SE-ResUnet’s grasp angle of prediction are incorrect, which can cause collisions between the gripper and the object and prevent successful grasp. Although GR-Convnet predicts a feasible grasp configuration, our method predicts a more suitable grasp angle and a more reliable grasp quality heat map. Overall, compared to other advanced methods, our method is able to generate more reliable grasp configuration under the same input data.
Table III. The experimental results of different component networks.


Figure 9. The part grasp detection results on the Jacquard dataset.

Figure 10. Comparison of grasp detection results on the Cornell dataset.

Figure 11. Comparison of grasp detection results on the Jacquard dataset.

Figure 12. Comparison studies with individual objects.

Figure 13. Comparison studies with multiple objects.

Figure 14. Comparison studies of specular objects and transparent objects.
Furthermore, we conducted a comparative analysis of the performance of various methods in real-world scenes. The objects involved were unseen, and some of them possessed unique physical properties. Firstly, our evaluation focused on predicting the grasp configuration of individual objects, as illustrated in Figure 12. For the left-side specular object, all methods effectively predicted the grasp configuration. However, GG-CNN’s grasp width of prediction was suboptimal, while GR-Convnet’s angle of prediction risked collisions between the gripper and the object. Although SE-ResUnet generates a suitable grasp position and angle, its grasp width requires refinement. In contrast, our method produced a more appropriate grasp configuration, which not only reliably grasps objects but also has a more suitable grasp width. For transparent objects on the right side, because transparent objects have unique physical properties; even humans can sometimes find it difficult to distinguish them from their environment. GR-Convnet and SE-ResUnet view objects and the environment as one and do not detect the existence of objects. GG-CNN has detected the object, but the angle and width could be better. Compared to opaque objects, our model has shown a decrease in the prediction of graspable areas but still predicts a suitable grasp pose. Secondly, while our models are trained only on data sets with individual objects, we verify the generalization of our method by comparing the results of the prediction of multiple objects, as shown in Figure 13. For all opaque objects on the left side of Figure 13, GG-CNN’s predicted grasp poses will result in collisions, and the GR-Convnet and SE-ResUnet predicted grasp poses can grasp objects, but overall, they are not as accurate as the predictions of the EGA-Net. For objects containing various different physical properties in the scene on the right side of the Figure 13, only the EGA-Net accurately predicted the appropriate grasp position, and other methods ignored the presence of transparent objects due to the inability to distinguish between the transparent objects and the environment.
We also conducted comparison experiments on the most difficult-to-predict transparent objects and specular objects separately, as shown in Figure 14. Due to the introduction of multiple objects in the scene, there is less environmental information unrelated to grasping, which reduces the difficulty of detecting object positions and enables most algorithms to generate detection results. The results show that EGA-Net can predict the appropriate grasp configuration for different types of objects with higher robustness and prediction accuracy, which is superior to the current multiple methods in the real world.
6.5. The robot visual grasp detection pipeline
The 4-channel RGB-D image from the RealSense D435i camera is input to the EGA-Net, which predicts the appropriate grasp configuration for our robot and executes the grasp action. When an object is picked up by the gripper and placed in the box, we think it is a successful grasp; otherwise, it is considered a failed one.

Figure 15. Grasp for transparent and specular objects.
6.5.1. Objects in isolated scene(Including trasparent and specular objects)
As far as we know, there are methods for grasping transparent objects [Reference Kumra, Joshi and Sahin14, Reference Saxena, Driemeyer and Ng46]. However, the position grasped by these methods is in an opaque area of the object. The performance of these methods could be better when facing completely transparent objects.
Although transparent and specular objects possess unique visual properties, our method adopts a multi-modal fusion approach and takes the RGB-D image as the input. Thus, it can still predict appropriate grasp configuration (see Figure 15). The robotic arm performed 93 successful grasps of the total 100 grasp attempts, achieving a success rate of 93% for transparent and specular objects. The failure to grasp is due to the network’s inability to detect transparent objects and generate appropriate grasp configuration.

Figure 16. Physical grasp in clutter.

Figure 17. Physical grasp in non-clutter. (a) only including opaque objects. (b) only including transparent objects. (c) only including specular objects. (d) Including opaque,transparent and specular objects. (e) including transparent and specular objects.
6.5.2. Objects in clutter scene
We conduct grasp experiments in the clutter scene. We stack objects from non-clutter experiments to build the clutter scene. In this scene, multiple objects are placed in the workspace, and there is occlusion between objects. This makes it more difficult for the model to predict the appropriate grasp configuration. Under the circumstances, we also achieved a success rate of 91% in a total of 100 grasp attempts. The experiment scene is shown in Figure 16. The most common gripping failure is caused by collisions between the gripper and surrounding objects.
6.5.3. Objects in non-clutter scene
To verify the generalization ability of our model, we conducted grasp experiments with different types of objects (see Figure 17). In 20 runs of the experiment (a) (only including opaque objects), we performed 140 attempts, of which 131 were successful (93.6%). Table III shows the results of data-driven methods for the real robotic grasp experiment. We performed the same experimental setup, only replacing objects to be grasped. Through comparison, our method outperforms current, same-type methods in real-world experiments. Experiments have shown that our model has a high generalization ability. Even in different environments (b), (c), (d), and (e) in Figure 17, it still achieves an average success rate of 88.6% (121/140) for grasping different types of objects. We encountered the most common failure cause: collision of the gripper with other objects. This may be due to the poor quality of the ground truth about width in the original dataset.
6.5.4. Error analysis
The output of the grasp detection method has the most critical impact on the successful grasp of objects. However, some external factors still have an impact on grasp performance.
-
• The input data used in this paper is the RGB-D image obtained by the Intel RealSense D435i RGB-D camera. Therefore, adopting an industrial camera with higher performance to improve the quality of the acquired image, especially the quality of the depth data will enhance the performance of grasp detection.
-
• Errors from hand-eye calibration results and the motion of the 6-DOF UR-5 robotic arm can also affect the grasp’s performance.
-
• When facing transparent and specular objects, the unique physical properties of these objects would distort the light path. Therefore, illumination would also affect the performance of grasping these objects.
7. Conclusion
In this paper, we constructed the ECA-ResNet module to establish the direct relationship between channels and their weights directly. We help the model better extract semantic information about grasp and propose a novel model, EGA-Net, for grasp detection. Our method takes multi-modal information (RGB-D image) as input to utilize visual information fully. It can efficiently distinguish important features, reduce attention to trivial features, and output a pixel-level quality score to obtain appropriate grasp configuration. The experiments show that our proposed method outperforms previous methods and achieves 98.9% and 95.8% on the Cornell and Jacquard datasets, respectively. Moreover, our model does not require any specific processing for input; it can also grasp transparent and specular objects with a high success rate, even in different environments. Nevertheless, in the grasp detection of transparent and specular objects, our method still encounters situations where transparent objects cannot be detected, possibly due to missing depth values. In the future, we plan to use the depth prediction method to solve the problem of missing depth values. We aim to improve the performance of robots in grasping transparent objects, enabling robots to replace humans in grasping dangerous transparent objects, such as post-assay test tubes, which will reduce the risk of infection for relevant practitioners. In addition, it is valuable to develop multi-modal fusion for grasping, such as visual information (RGB and depth), temperature, and audio modalities.
Author contribution
Haonan Xi: Conceptualization, design of methodology, designing computer programs, specifically performing the experiments, and video demonstration. Shaodong Li: Supervision, provision of study materials, computing resources and instrumentation, and oversight and leadership responsibility for the research activity planning and execution, specifically critical review on previous versions of the manuscript. Xi Liu:Supervision. All authors read and approved the final manuscript.
Financial support
This work was supported in part by the Natural Science Foundation of Guangxi (Grant No. 2023GXNSFBA026069), and in part by the funding of basic ability promotion project for young and middle-aged teachers in Guangxi’s colleges and universities (Grant No. 2022KY0008).
Competing interests
The authors declare no competing interests exist.
Ethical approval
None.




















